

Dự án này là lý tưởng cho những người thường quên cho cá ăn. Hoặc đơn giản là không phải lúc nào cũng có thể làm điều đó đúng giờ. Đã thực hiện một trung chuyển như vậy, bạn không thể lo lắng về vật nuôi nhỏ của bạn, và thậm chí cảm thấy tự do để lại trong một thời gian.
Vật liệu:
- Arduino UNO hoặc một máy vi tính tương thích khác.
- Bộ đổi nguồn 9V hoặc 12V.
- Một động cơ bước 5V từ một ổ đĩa mềm cũ.
- Phân vùng trơn tru (được sử dụng từ hộp công cụ).
- Chuyển đổi đòn bẩy từ điện thoại cố định.
- Vỏ từ ổ cứng (đóng vai trò là thùng chứa thức ăn).
- Tấm trơn (ví dụ: thước nhựa).
- Chân máy từ camera quan sát.
- Điện trở 10 kOhm.
- Hẹn giờ cơ AC.
Bước đầu tiên. Trường hợp hội:
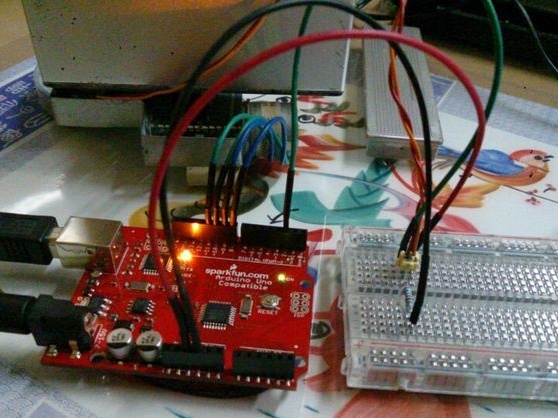
Thiết kế lắp ráp được hiển thị trong hình đầu tiên. Một lỗ được cắt ra ở một bên của vỏ ổ cứng. Đối với phần này của bộ nạp, bạn thậm chí có thể sử dụng một chai nhựa, tuy nhiên, bạn sẽ cần phải đưa ra một hỗ trợ cho nó để nó được giữ lộn ngược.
Tác giả sử dụng chân máy từ camera quan sát, vì nó có chiều cao lý tưởng để lắp đặt động cơ bước bên dưới. Tất cả những gì còn lại là khoan một lỗ trên vỏ.
Một động cơ bước 5V với cơ chế truyền động được sử dụng để di chuyển các ống kính ổ đĩa đã được sử dụng để di chuyển nắp. Một phân vùng mịn từ hộp được đặt trên đỉnh của ống kính, bên dưới lỗ nơi các viên thức ăn sẽ thoát ra. Đối với điều này, nó cũng được khuyến khích sử dụng một thước kẻ bị hỏng. Một milimet được để lại từ đáy thân tàu để các viên thức ăn có thể đi qua nắp kín.


Bước hai Sửa đổi cơ thể:
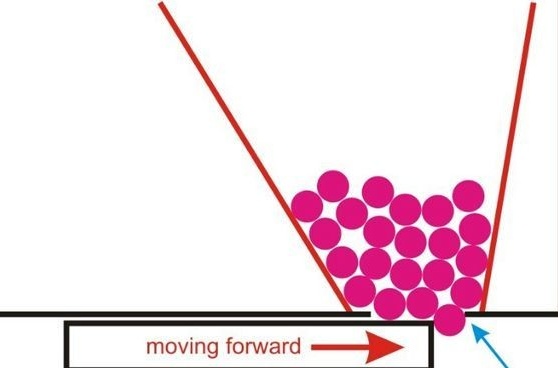
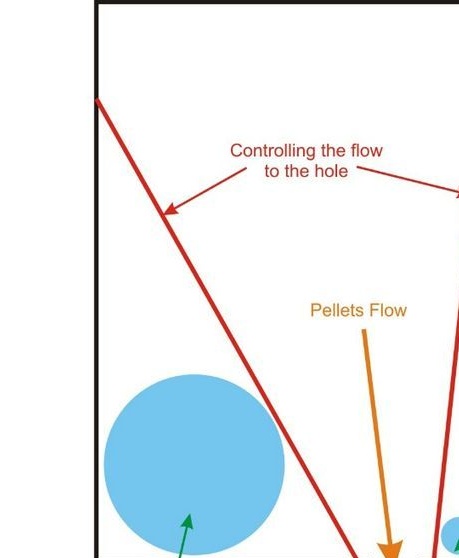
Sơ đồ sau đây cho thấy cách thức ăn phải đi qua lỗ một cách chính xác để các viên không nán lại trong các góc thoát của thức ăn.
Sau hai ngày sử dụng, tác giả nhận ra rằng một số nguồn cấp dữ liệu đã bị kẹt, nhưng không đi ra như dự định. Đó là lý do tại sao chúng ta cần một thước kẻ hoặc bất kỳ tấm trơn nào vừa với hộp đựng và có hình chữ V.

Bước ba Điện tử một phần của bộ nạp:
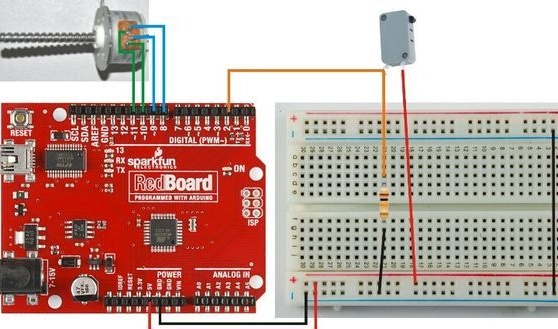
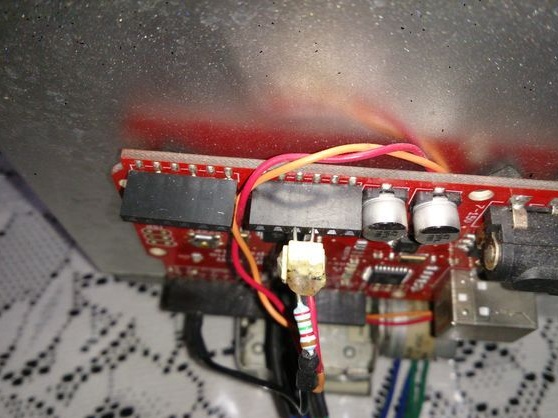
Một động cơ bước, điện trở 10 kΩ và công tắc được cài đặt như thể hiện trong sơ đồ bên dưới. Để tạo điều kiện cho sự hiểu biết về hoạt động của mạch và thử nghiệm, một bảng mạch được sử dụng, nó bị thiếu trong phần lắp ráp cuối cùng (ví dụ trong ảnh cuối cùng).
Bốn dây động cơ kết nối với chân kỹ thuật số 8-11. Một chân của công tắc để đầu ra nguồn 5V. Chân thứ hai, lần lượt, được kết nối với mặt đất bằng điện trở 10 kΩ, và cũng được kết nối với chân kỹ thuật số 2.
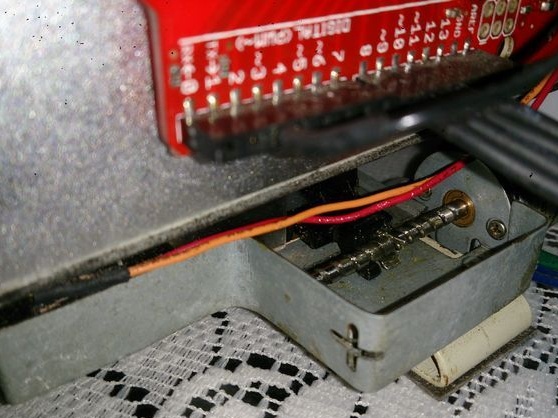
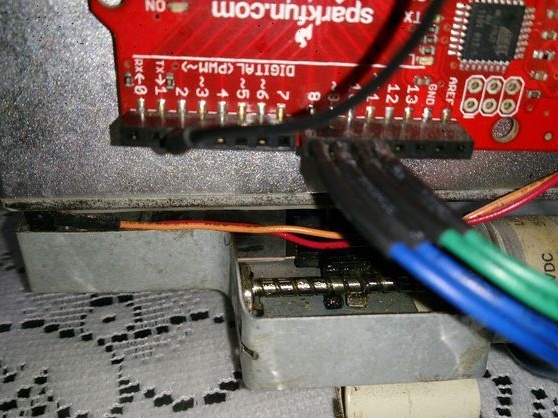
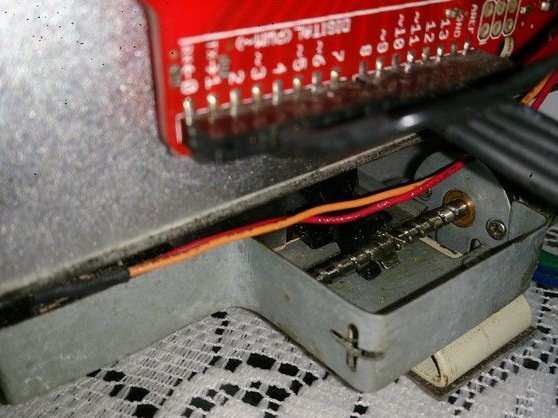
Công tắc được đặt ở phía trước nắp di động và phần kim loại được uốn cong, do đó tạo thành một nút chặn (dây màu đỏ và màu cam trong ảnh thứ ba). Khi công tắc được di chuyển về phía trước và nhấn dừng, Arduino sẽ đăng ký giá trị CAO và dừng động cơ.
Bảng được gắn vào mặt sau của vỏ bằng băng keo điện, và phích cắm có bộ hẹn giờ ở bên cạnh. Chúng được sử dụng để cân bằng trường hợp để nó ở đúng vị trí.
Kiểm tra công việc tự làm không có hộp đựng thức ăn:
Video sau đây cho thấy hoạt động của một thiết bị lắp ráp hoàn chỉnh. Như bạn có thể thấy, đầu ra nguồn cấp đầu tiên là chính xác. Ở lối ra thứ hai của thức ăn, có thể thấy rằng nếu các hạt bị kẹt và nắp không đóng đúng cách, thì nó sẽ di chuyển tiến và lùi cho đến khi nó đóng lại chính xác.
Mã chương trình: