

Tôi tiếp tục làm người mẫu và chế tạo robot. Tôi đã viết hướng dẫn để tạo một điều khiển từ xa mô hình và robot. Điều khiển từ xa dựa trên cần điều khiển Sega cũ. Cần điều khiển này có bốn mũi tên và 8 nút, đủ để điều khiển một máy hoặc một robot nhỏ. Việc quản lý được thực hiện bằng đèn LED hồng ngoại. Hôm nay tôi sẽ viết hướng dẫn hiện đại hóa điều khiển từ xa này, cụ thể là chuyển đổi nó thành điều khiển từ xa Bluetooth. Tùy thuộc vào mô-đun Bluetooth được sử dụng, điều khiển từ xa sẽ kết nối với chính thiết bị được lập trình sẵn hoặc có thể kết nối với điều khiển từ xa. Tôi sẽ mô tả cả hai lựa chọn. Chúng tôi sẽ cần:
- Cần điều khiển từ Sega
- Arduino Pro Mini 3,3v 8 MHz
- USB-TTL
- 2 pin Ni-Mn 1.2v 1000mA
- Mô-đun Bluetooth HC-05 hoặc HC-06
- Đèn LED đỏ
- Đèn LED màu xanh
- Điện trở 2x75Om, 2x5Om, 1x2Om
- Đầu nối PLSx5 "mẹ"
- Keo nóng
- dây
- Ngăn chứa pin 4xAAA
- Dây nhiều màu
- Hàn sắt, hàn, nhựa thông
- cánh tay thẳng
Bước 1 Chọn Mô-đun Bluetooth
Hai mô-đun được yêu cầu để liên lạc. Chúng tôi sẽ chèn một cái vào điều khiển từ xa và cái thứ hai chúng tôi sẽ kết nối với máy đánh chữ hoặc người máy. Có một số lượng lớn các mô-đun Bluetooth. Chúng khác nhau về chức năng và các giao thức truyền thông được hỗ trợ. Một danh sách mẫu của các mô-đun được tìm thấy:
- HC-03, HC-04 (HC-04-M, HC-04-S) trên chip BC417143;
- HC-05, HC-06 (HC-06-M, HC-06-S) trên chip BC417143;
- HC-05-D, HC-06-D;
- HC-07 - mô-đun với chip CSR 41C6;
- HC-08 - mô-đun với mức tiêu thụ năng lượng cực thấp và giao thức Bluetooth 4.0;
- HC-09 là mô-đun mới nhất được thiết kế để thay thế HC-06 và HC-07.
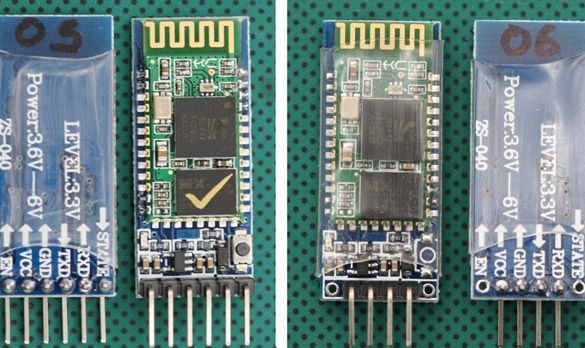
Tôi đã giải quyết trên hai mô-đun HC-05 và HC-06, vì chúng là tối ưu về giá cả / chức năng. Chúng hỗ trợ giao thức truyền thông - Thông số kỹ thuật Bluetooth v2.0 + EDR. Phạm vi lên tới 10 mét (cấp độ 2). Tương thích với tất cả các bộ điều hợp Bluetooth hỗ trợ SPP. Âm lượng của bộ nhớ flash (để lưu phần sụn và cài đặt) là 8 Mbit. Chúng hoạt động ở tần số của tín hiệu vô tuyến - 2,40 .. 2,48 GHz. Giao diện máy chủ là USB 1.1 / 2.0 hoặc UART. Chúng có mức tiêu thụ điện năng thấp - dòng điện trong quá trình giao tiếp là 30-40 mA. Giá trị hiện tại trung bình là khoảng 25 mA. Sau khi truyền thông được thiết lập, mức tiêu thụ hiện tại là 8 mA. Các mô-đun này rất dễ tìm, chúng là phổ biến nhất. Các mô-đun rất giống nhau, nhưng sự khác biệt chính giữa chúng là HC-05 có thể hoạt động cả ở chế độ chính và chế độ phụ.HC-06 chỉ có thể là nô lệ. Nói một cách đơn giản, HC-06 không thể phát hiện một thiết bị được ghép nối và thiết lập kết nối với nó, nó chỉ có thể tuân theo chủ. Các mô-đun được bán như hai bảng hàn với nhau. Cái nhỏ hơn là mô-đun nhà máy. Lớn - một bánh mì đặc biệt cho DIY. Nó trông giống như một bảng nhỏ hơn với chip BC417:

Và do đó, các mô-đun DIY HC-05 và HC-06:
Bạn có thể mua một mô-đun mà không cần bánh mì. Nó có giá rẻ hơn một chút, nhưng sau đó bạn sẽ phải cài đặt một bộ điều chỉnh điện áp 3,3 V cho mô-đun. Ngoài ra, khoảng cách giữa các tiếp điểm là nhỏ và bạn sẽ phải tự hành hạ mình bằng cách hàn vào mô-đun dây.
Để thiết lập liên lạc giữa điều khiển từ xa và robot hoặc máy, bạn cần định cấu hình hai mô-đun Bluetooth chồng lên nhau. Trong trường hợp này, chúng tôi sẽ cấu hình mô-đun HC-05 để nó tìm và kết nối với HC-06.
Bước 2 Định cấu hình HC-06.
Đầu tiên bạn cần kết nối HC-06 với máy tính. Điều này có thể được thực hiện bằng cách kết nối mô-đun thông qua bộ chuyển đổi USB-UART. Trong trường hợp này, kết nối như sau:
Bluetooth - USB-UART
TX - RX
Rô - TX
VCC - +5
GND - GND
Nếu bạn không có USB-UART trong tay, bạn có thể viết bản phác thảo sau vào bất kỳ bảng Arduino nào:
Kết nối như sau:
Bluetooth - Arduino
TX - chân 2
RX - pin 3
VCC - +5
GND - GND
Sau đó, chúng tôi mở bất kỳ chương trình thiết bị đầu cuối nào, chọn cổng com mà HC-06 được kết nối, tốc độ mặc định là 9600, NL và CR không cần thiết. Nếu kết nối Bluetooth không được thiết lập với HC-06, mô-đun ở chế độ nhập lệnh AT. Nếu mô-đun không đáp ứng, hãy thử quá tải nó bằng cách ngắt kết nối dây dương và kết nối lại. Và nhập các lệnh sau:
"AT" - không có dấu ngoặc kép, câu trả lời "OK" sẽ xuất hiện.
Cấm AT + ĐỊA CHỈ - với lệnh này, chúng tôi sẽ tìm ra địa chỉ duy nhất của HC-06, ghi lại địa chỉ này
"AT + BAUD7" - đặt tốc độ thành 57600
"AT + RESET" - chúng tôi quá tải mô-đun
Các lệnh sau không cần phải nhập, nhưng chỉ trong trường hợp tốt hơn là biết chúng:
"AT + NAME
Cấm AT + ORGL '- đặt lại mô-đun về cài đặt gốc
Điều này hoàn thành việc thiết lập HC-06.
Bước 3 Định cấu hình HC-05.
Chúng tôi kết nối mô-đun tương tự như HC-06. Tiếp theo, mở bất kỳ chương trình thiết bị đầu cuối nào, chọn cổng com mà USB-UART hoặc Arduino treo, tốc độ giao tiếp mặc định của nhà máy là 9600, nhưng tôi cũng đã gặp ở tốc độ 38400, nếu bạn không thay đổi, hãy chọn 9600, bạn cũng có thể kết nối và thay đổi thành 38400. Nó có giá trị bao gồm các tham số NL và CR. Để chuyển chế độ nhập lệnh AT, bạn cần nhấn nút trên bảng HC-05, sau đó nhập thông tin sau:
"AT" - được nhập mà không có dấu ngoặc kép, câu trả lời "OK" sẽ xuất hiện. Nếu bạn đến, chúng tôi tiếp tục nhập lệnh hơn nữa.
Cấm AT + ROLE = 1 - - với lệnh này, chúng tôi đặt vai trò của mô-đun với chữ số:
0 - nô lệ, 1 - chủ, 2 - nô lệ trong chu trình *. Bạn sẽ nhận được câu trả lời "+ ROLE: 1 \ r \ n" hoặc "OK"
Cấm AT + CMODE = 0 - mô-đun trong vai trò của chủ chỉ được kết nối với thiết bị Bluetooth có địa chỉ được chỉ định bởi lệnh Hồi AT + BIND.
Cấm AT + BIND: 1234,56,123456 Lần - để thiết lập kết nối với HC-06 của bạn, bạn cần nhập địa chỉ của nó ở đây. Sau khi nhập tất cả các lệnh, mô-đun ở vai trò chính (ROLE = 1) và chế độ kết nối với địa chỉ cố định được đặt (CMODE = 0), nó sẽ chỉ kết nối với thiết bị Bluetooth có địa chỉ được chỉ định bởi lệnh này. Các phần của địa chỉ được nhập: trong khi cài đặt - được phân tách bằng dấu phẩy và khi được trả lời - thông qua dấu hai chấm. Bạn sẽ nhận được câu trả lời: "+ BIND: 1234: 56: 789ABC \ r \ n" hoặc "OK"
Cấm AT + UART = 57600,0,0 - đặt tốc độ thành 57.600 bps, bit stop được biểu thị bằng số: 0 - một, kiểm tra được biểu thị bằng số: 0 - không cần xác minh
Nếu bạn bối rối về cài đặt mô-đun hoặc nó ngừng hoạt động chính xác, hãy thử lệnh sau:
Cấm AT + ORGL
Và sau đó cấu hình lại các cài đặt bạn cần.
Bằng cách này, chúng tôi đã tạo ra một liên kết mạnh mẽ giữa HC-05 và HC-06. Khi các mô-đun HC-05 được bật, nó sẽ thiết lập kết nối với HC-06. Từ kinh nghiệm cá nhân tôi có thể nói rằng tốt hơn là bật HC-05 trước, sau đó là HC-06. Nếu kết nối bị mất, bạn cần quá tải cả hai mô-đun.
Bước 4 Chuẩn bị điều khiển từ xa.
Bước này được mô tả chi tiết trong các hướng dẫn trước tại:
https://vim.imdmyself.com/8626-ik-pult-iz-dzhoystika-ot-sega.html
Cần thực hiện các bước từ 1 đến 4. Hàn diode IR là tùy chọn, mặc dù nó sẽ không can thiệp.
Bước 5 Kết nối mô-đun Bluetooth.
Tôi khuyên bạn nên cài đặt HC-06 trong điều khiển từ xa. Vì để thay đổi cài đặt của mô-đun, bạn chỉ cần điền vào bản phác thảo tương ứng trong Arduino Pro Mini. Trong trường hợp của HC-05, bạn sẽ phải tháo rời bàn điều khiển để nhấn nút để chuyển sang chế độ lệnh AT.Chúng tôi kết nối mọi thứ theo sơ đồ sau
Cần điều khiển - Arduino
Mũi tên lên - pin 2
Mũi tên xuống - pin 4
Mũi tên trái - pin 5
Mũi tên phải - pin 6
Nút A - chân 8
Nút B - chân 10
Nút C - chân 7
Nút X - pin 12
Nút Y - chân 11
Nút Z - chân 9
Nút bắt đầu - chân 14 (A0)
Nút đặt lại - RST
Chung - GND
Bluetooth - Arduino
TX - chân 16 (A2)
RX - chân 17 (A3)
VCC - + 5
GND - GND
HC-05 chúng tôi kết nối với máy đánh chữ hoặc robot của bạn mà bạn sẽ điều khiển. Tùy chọn kết nối và phác thảo có thể được tìm thấy trong các hướng dẫn khác của tôi. Khi viết phác thảo robot, bạn cần đặt tốc độ kết nối thành 57600 và sử dụng thư viện SoftwareSerial trong bản phác thảo.
Bước 6 Chuẩn bị môi trường và phần sụn.
Cách tốt nhất để viết và chỉnh sửa bản phác thảo là sử dụng Arduino IDE. Phiên bản Arduino IDE phải không thấp hơn 1.8. Tải xuống Arduino IDE từ trang web chính thức:
https://www.arduino.cc/en/Main/Software
Sau đó, bạn cần thêm thư viện vào Arduino IDE. Bản phác thảo sử dụng một thư viện SoftwareSerial.h (để liên lạc với mô-đun Bluetooth):
Bạn sẽ cần phải tải xuống và cài đặt nó. Bạn có thể cài đặt thư viện bằng cách giải nén tệp lưu trữ và di chuyển các tệp đã giải nén vào thư mục của Thư viện thư mục nằm trong thư mục có cài đặt Arduino IDE. Hoặc bạn có thể sử dụng công cụ thêm thư viện tích hợp - mà không giải nén tệp lưu trữ đã tải xuống, chọn menu Phác thảo - Kết nối Thư viện trong Arduino IDE. Ở đầu danh sách thả xuống, chọn mục "Thêm thư viện .Zip". Và chỉ ra vị trí của kho lưu trữ được tải xuống. Sau khi cài đặt thư viện, bạn cần khởi động lại Arduino IDE.
Điều khiển từ xa của chúng tôi được flash giống như phiên bản trước của điều khiển từ xa, được kết nối qua USB-TTL qua đầu nối, sạc cũng thông qua nó. Khi điền vào bản phác thảo, bấm Đặt lại.
