
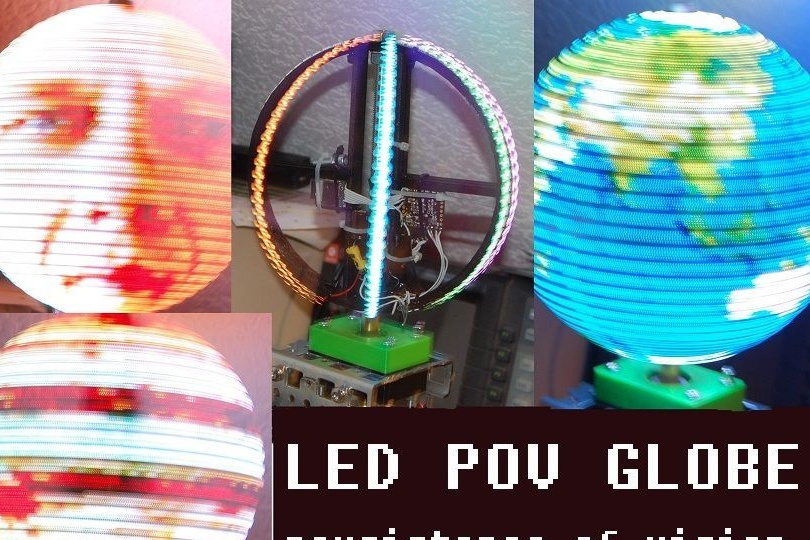
Hướng dẫn này là về cách xây dựng một quả cầu POV với ít hơn. điện tử các thành phần hơn các thiết bị tương tự khác. Thông qua việc sử dụng đèn LED RGB với bộ điều khiển APA102 tích hợp. Điều này sẽ giúp bạn tiết kiệm được nhiều mối hàn. Bạn có thể đọc thêm về họ. Những đèn LED không cần thêm trình điều khiển. Chúng được kết nối trực tiếp với vi điều khiển theo hai cách. Điều này cho phép bạn chuyển đổi đèn LED rất nhanh. Để có được hình ảnh ổn định, đồng bộ hóa SPI có tần số 10 MHz. Một điểm cộng khác của thiết kế này là việc sử dụng thẻ flash, lưu trữ hình ảnh ở định dạng BMP.
1 Vật liệu cần thiết

Đối với trục của quả địa cầu, bạn sẽ cần:

1. Nghiên cứu với sợi M8 và chiều dài 250 mm
2. Nut M8
3. Tay áo bằng đồng thau dài 10 mm và 100 mm
4. Vòng đệm nhựa 8 mm 2 miếng (bao gồm các tệp STL)
5. khớp nối cho những người sẽ sử dụng động cơ bước Nema 17
Để cấp nguồn cho vòng LED trên trục, bạn sẽ cần
1. ổ bi 6300 (10x35x11)
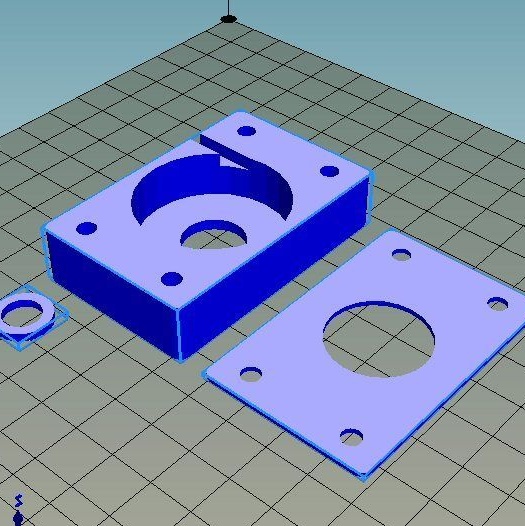
2. hai giá đỡ cho vòng bi. In trên máy in 3d hoặc làm bằng gỗ.
3. Bốn bu lông M4x40 có đai ốc
4. Mẹo về dây 2 chiếc 8 mm
5. với đường kính trục là 5 mm
6. 4 bu lông M4 để gắn động cơ
7. có thể là một fan hâm mộ cho nó.
Ngoài ra, bạn có thể sử dụng bất kỳ động cơ nào với mô-men xoắn và kiểm soát tốc độ phù hợp. Động cơ được sử dụng trong thiết kế này có mô-men xoắn cực đại ở mức 50A, nhưng mức tiêu thụ tối đa trong quá trình vận hành chỉ là 18A.
Để điều khiển trình điều khiển động cơ servo, sử dụng
1.
2. hai nút
Cung cấp điện 12V cho động cơ và 5V cho đèn LED. Là nguồn cung cấp năng lượng, bạn có thể sử dụng thiết bị cũ từ PC. Bạn có thể mua một bộ nguồn 12 v / 5A và kết nối với nó
Đối với vòng LED bạn sẽ cần:
1.664 đèn LED 2 dải 32 miếng
2. Tụ 1000 1000F 10V
3. Cảm biến Hall và nam châm
4. Điện trở kéo lên 1k, 10k
5. Vòng phải được in trên máy in 3D hoặc sử dụng một đoạn ống PVC
6. Dây buộc nhựa (100 mm)
7. Một chất keo tốt dính vào nhau và không bay ra ở 2500 vòng / phút
Bạn cũng sẽ cần một Vi điều khiển Parallax Propeller. Hoặc bạn có thể sử dụng cái khác mô hình bộ điều khiển, nhưng cũng mất một khoản phí cho. Bộ điều khiển này được lập trình và flash đơn giản như Arduino. Bạn sẽ cần một bộ chuyển đổi USB-TTL để lập trình cả hai bộ điều khiển.
Thân.
Nhà ở cho tự làm Bạn có thể mất bất kỳ đủ cứng. Điều quan trọng nhất là động cơ và vòng bi có thể được bảo đảm đủ đáng tin cậy.
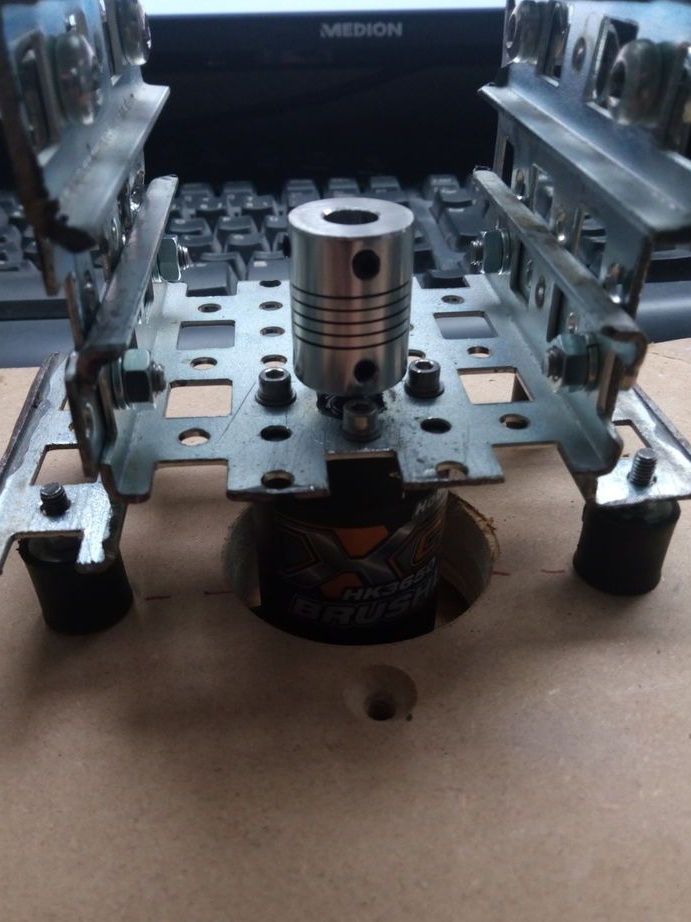
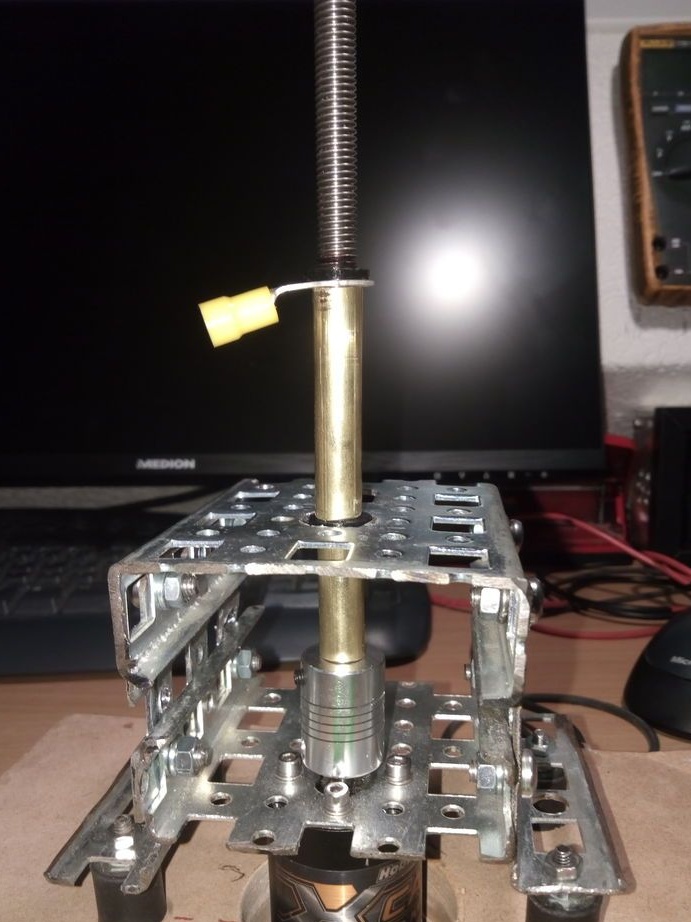
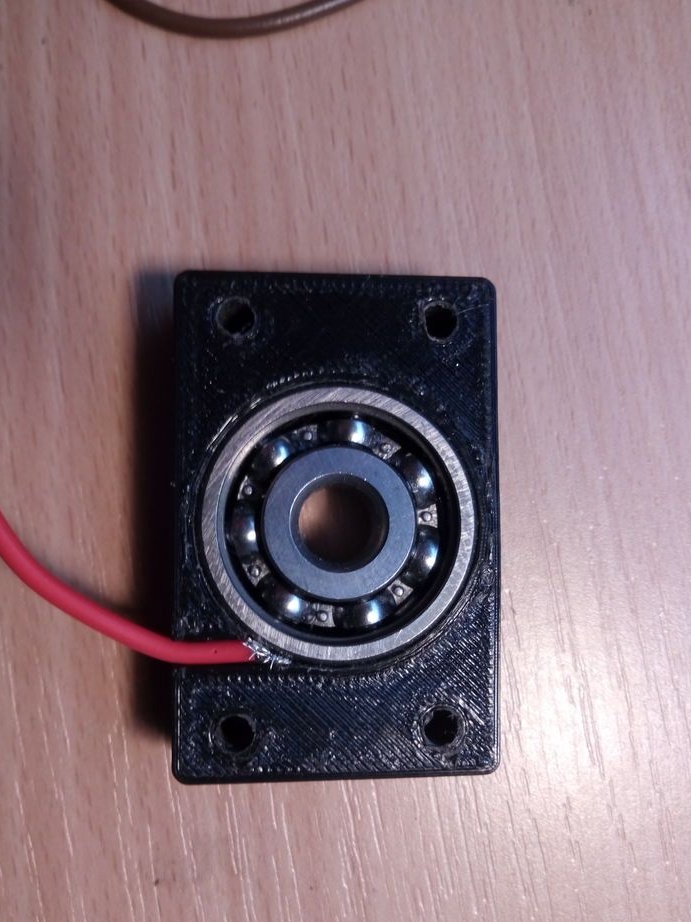
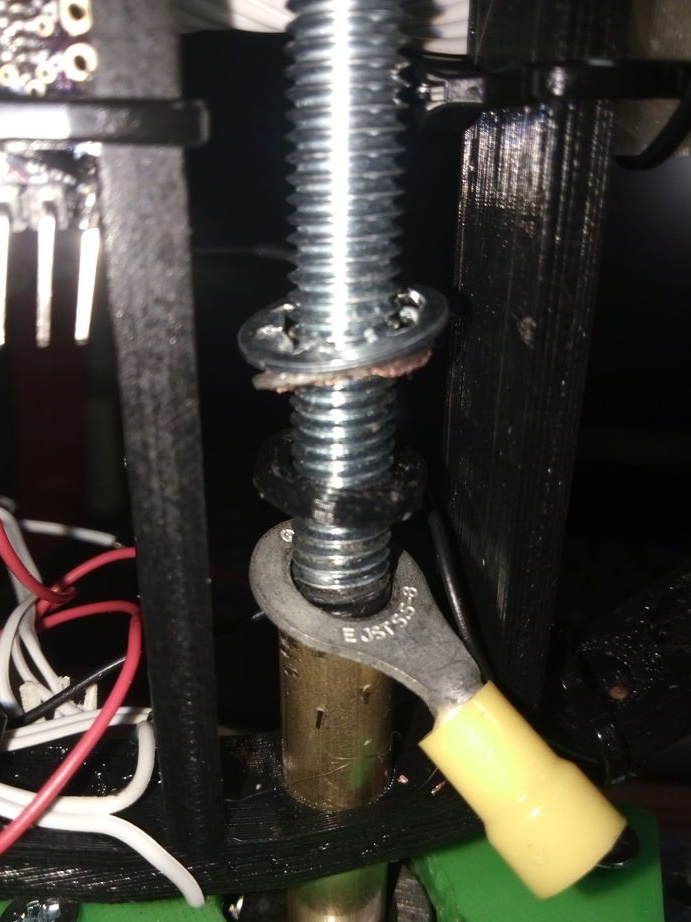
Một stud dài 250 mm được sử dụng cho trục truyền động.Chiều dài của ống lót bằng đồng là 50 và 30 mm. Phụ thuộc vào kích thước vòng và chiều dài trục. Tay áo trên và dài hơn phải được cách ly với stud, bởi vì nó được sử dụng để cung cấp năng lượng cộng với đèn LED. Để làm điều này, quấn băng keo điện vào kẹp tóc hoặc sử dụng co nhiệt, hai vòng đệm nhựa cũng sẽ cần thiết. Tay áo sẽ cần được khoan đến 8,5-9mm nếu không nó sẽ không vừa. Tay áo khác cùng với thanh tạo thành một tiếp xúc tiêu cực.
Công suất trừ được đặt trong một rãnh đặc biệt và được ấn vào ổ đỡ trong giá đỡ, có thể được in trên máy in. Tập tin STL khung trong kho lưu trữ.


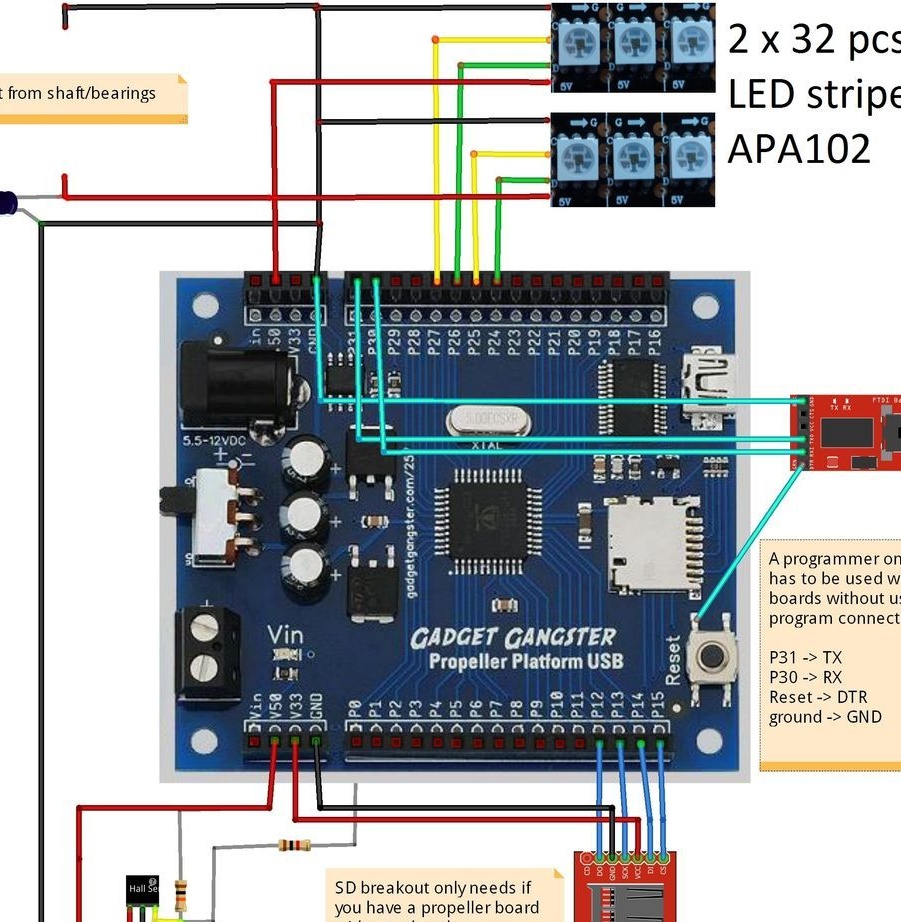
Bây giờ bạn cần kết nối động cơ điện, như thể hiện trong sơ đồ.
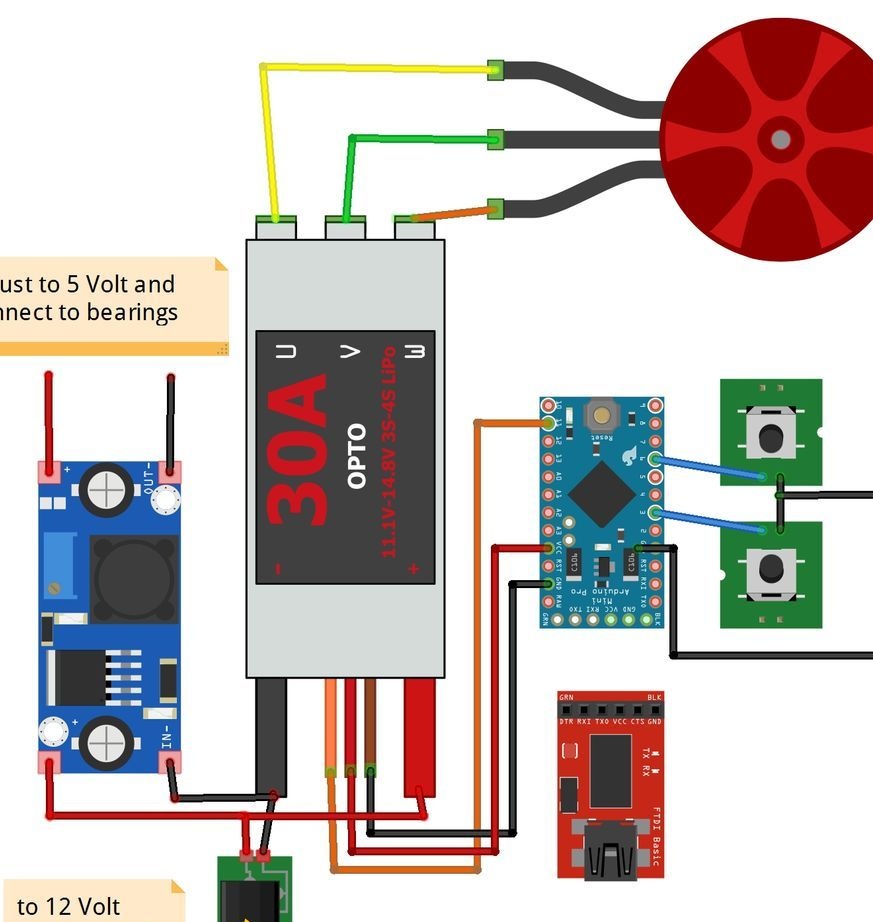
Hai nút trên sơ đồ được sử dụng để điều chỉnh tốc độ. Khi bạn bật nguồn, ESC sẽ nhận được giá trị 500 s. Nhấn một trong các nút để bật động cơ. Bản phác thảo sẽ lấy giá trị của Start StartPos = 625. Sau này, khi bạn điều chỉnh tốc độ, giá trị này có thể được thay đổi. Nhấn nút trong hai giây và động cơ sẽ dừng lại.
Lắp ráp cấu trúc cốt lõi.
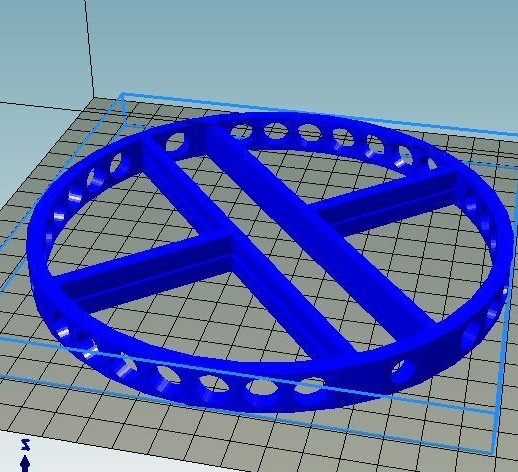

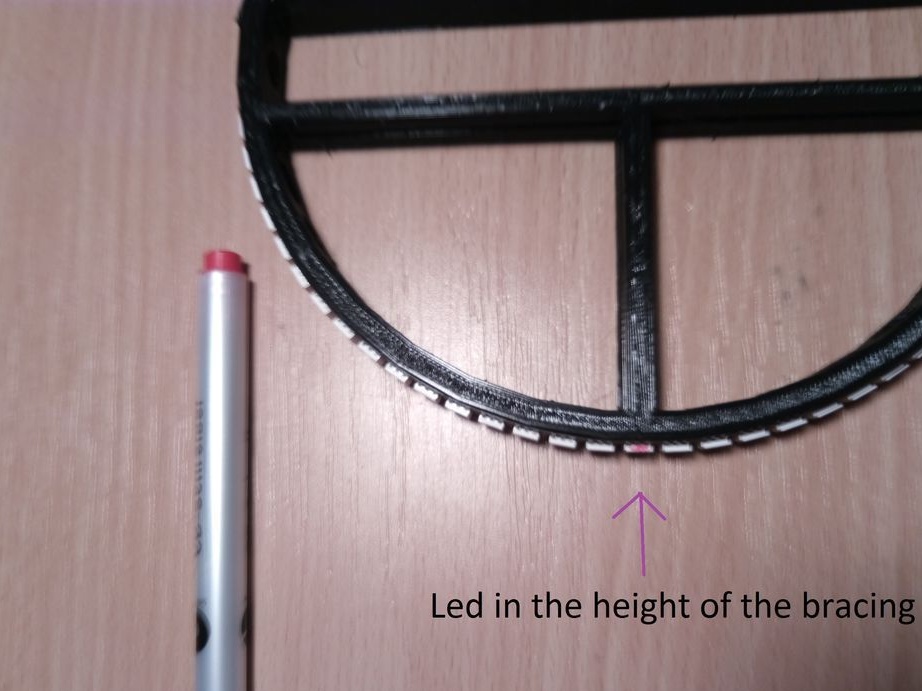
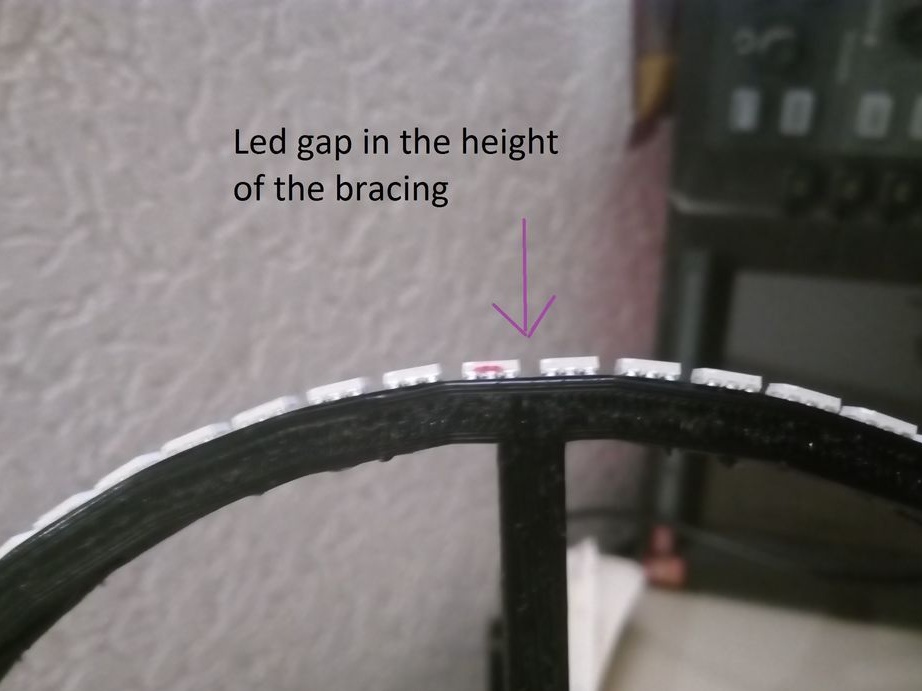


Để thực hiện việc này, hãy tự in vòng từ tệp đính kèm. Tác giả đã tạo ra nhiều lỗ hổng trong nó để giảm trọng lượng. Bạn có thể sử dụng một đoạn ống PVC. Hai dải 32 đèn LED được cắt. Hai dải đèn LED tạo thành các đường chẵn và lẻ. Sắp xếp các băng sao cho các đèn LED của một dải được đặt giữa các đèn LED của dải kia, nhưng ở phía ngược lại. Sau khi bạn buộc chặt băng, bạn có thể kết nối đèn LED của bảng điều khiển. Và sau đó bạn cần phải cân bằng toàn bộ lắp ráp.
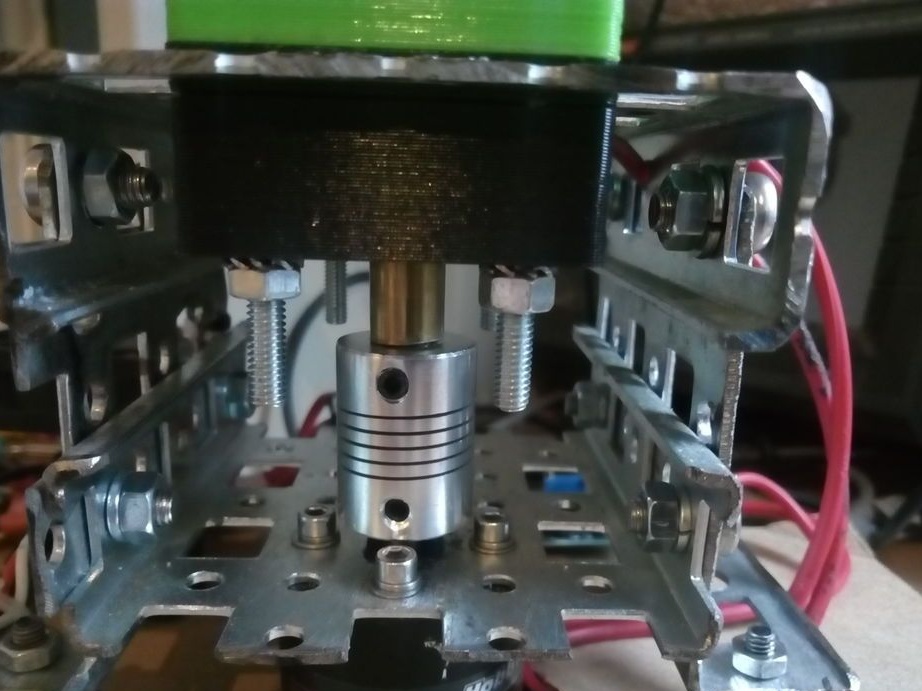
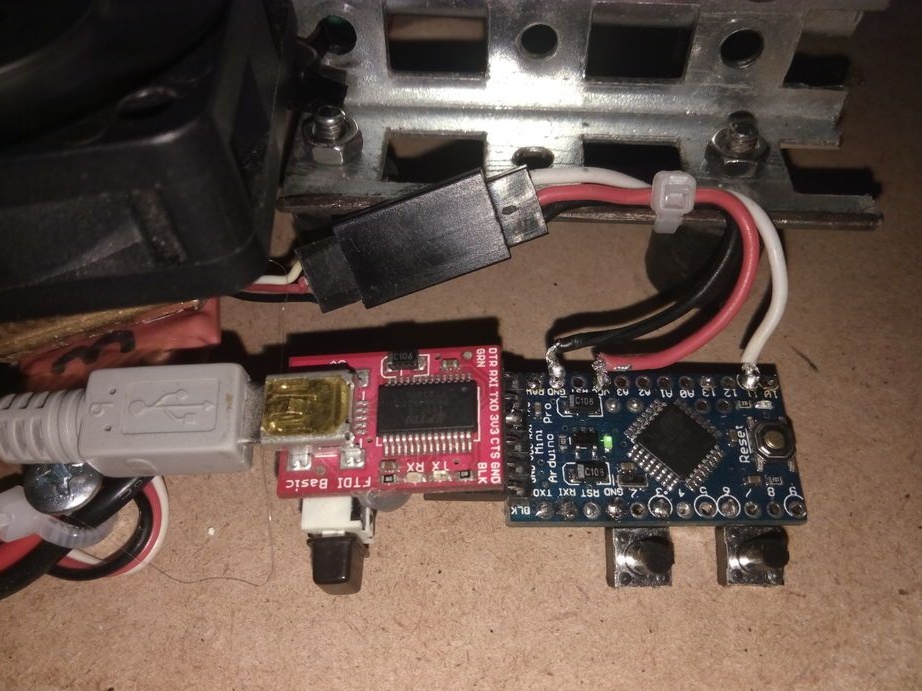
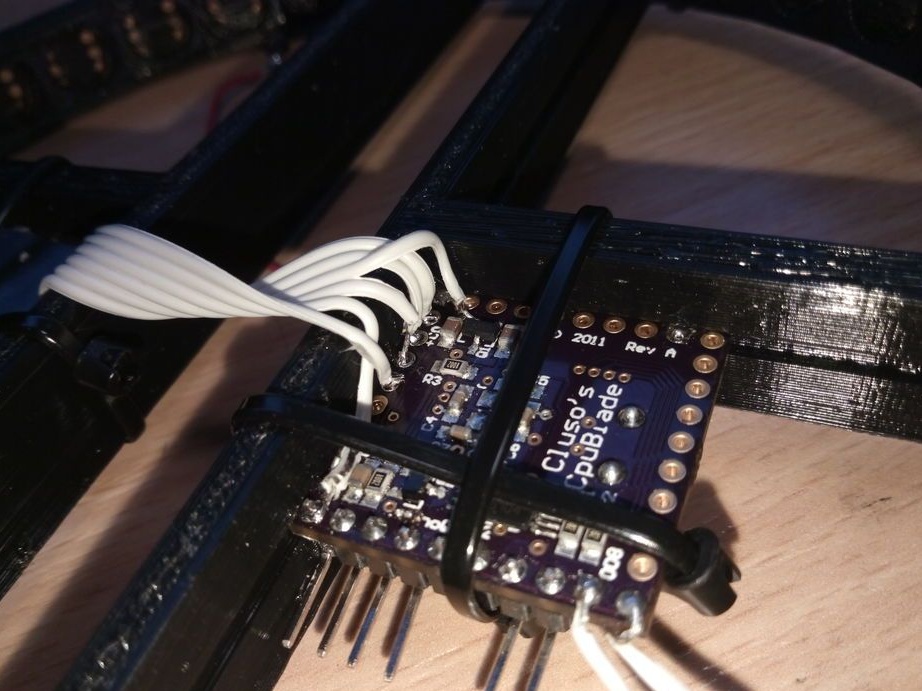
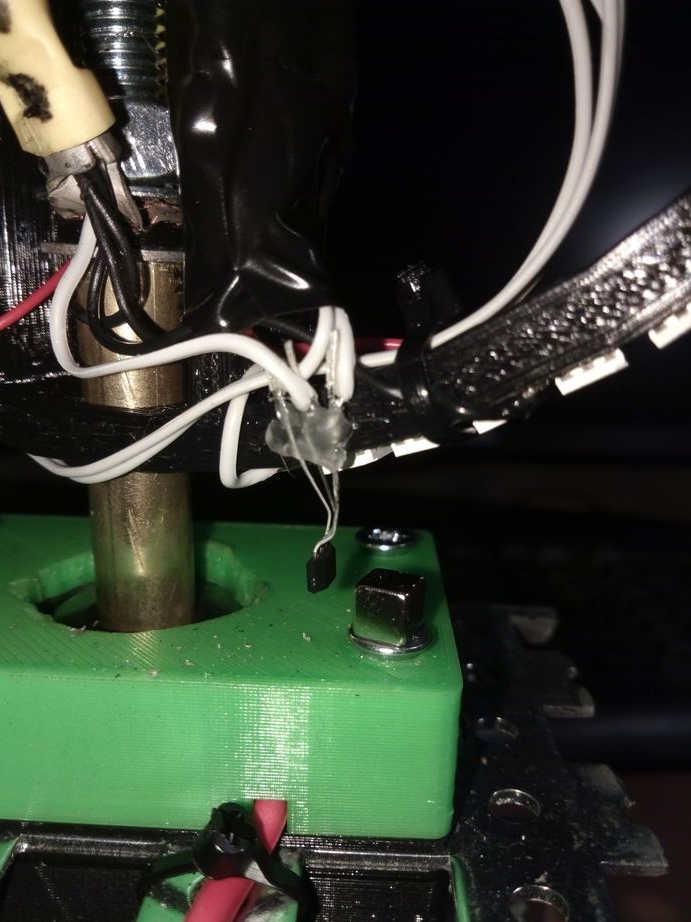
Các bức ảnh sau đây cho thấy cách kết nối tất cả các thành phần của thiết bị với nhau. Bức ảnh cũng cho thấy cảm biến hội trường được cài đặt với một nam châm.
Để lập trình Vi điều khiển Parallax Propeller bạn cần
KHÔNG kết nối thiết bị của bạn với cổng USB hoặc cổng nối tiếp cho đến khi bạn đã cài đặt phần mềm. Thông tin chi tiết về việc tải firmware lên Parallax có thể được tìm thấy
Tác giả sử dụng một bảng MCU cũ hơn và ít kinh tế hơn về mặt tiêu thụ năng lượng, bởi vì anh ta không thể tìm thấy các thư viện mới trên các bảng điều khiển mới.
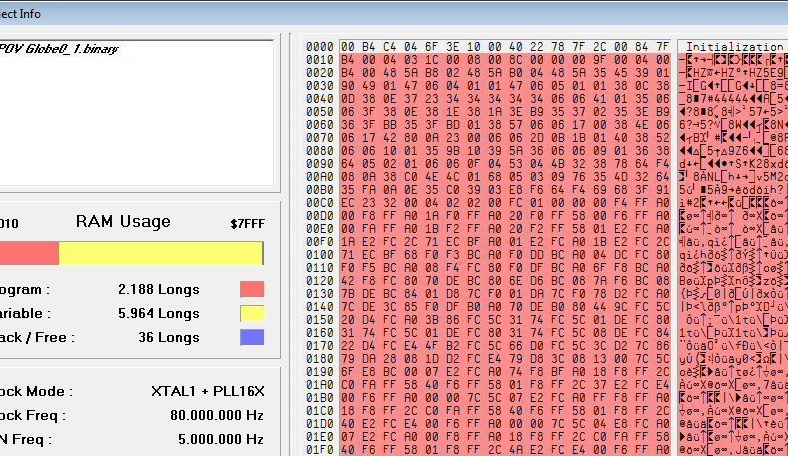
Sau khi bạn thu thập và kết nối mọi thứ, bạn cần lập trình bộ điều khiển. Tác giả làm điều này với sự giúp đỡ. Tập tin với phần sụn trong kho lưu trữ.
Bây giờ bạn có thể thử khởi động thiết bị. Ngay từ đầu, sao chép ảnh thử vào thẻ SD và dán vào khe.
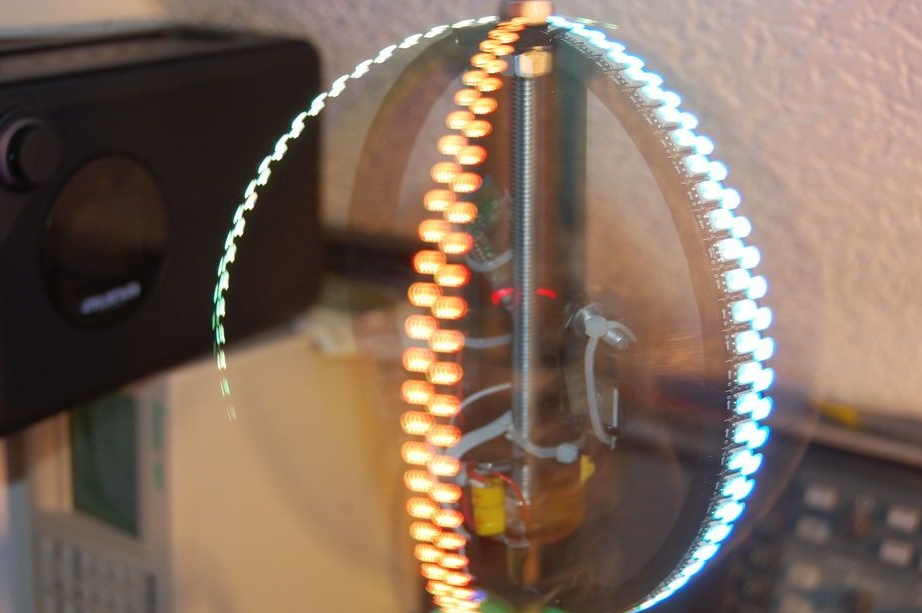
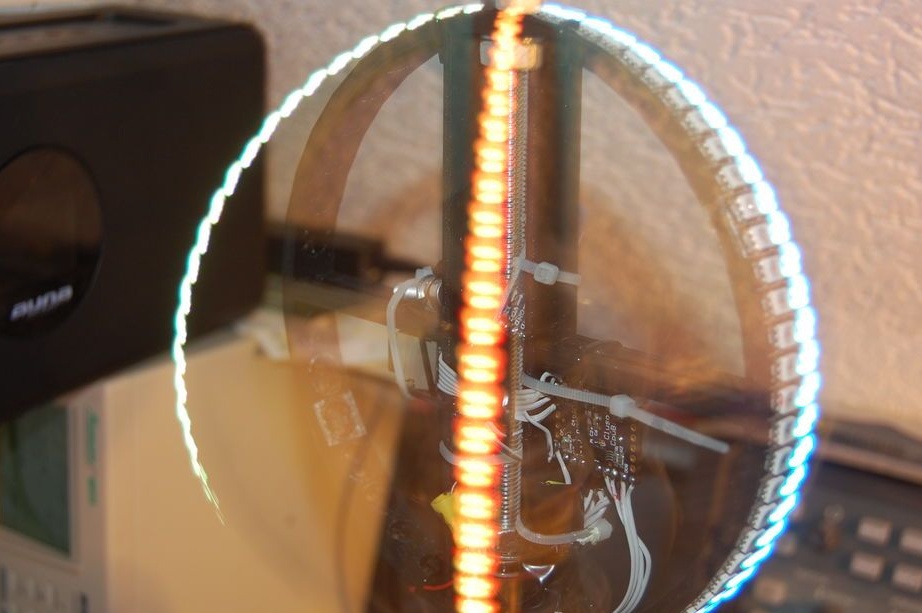
• Nếu bạn xoay vòng bằng tay, đèn LED sẽ nhấp nháy mỗi khi cảm biến hội trường đi qua nam châm
• Bật động cơ. Tăng tốc độ bằng các nút, cần đảm bảo đèn LED sáng lên như trong 2 ảnh
• Kết nối thiết bị đầu cuối Arduino với bộ điều khiển động cơ.
• Ghi nhớ giá trị được hiển thị.
• Dừng động cơ
• Viết giá trị được lưu trước đó vào biến "startPos"phác họa POV_MotorControl
• Lập trình lại Arduino.
Lần sau động cơ của bạn bắt đầu ngay lập tức với tốc độ phù hợp. Bây giờ bạn có thể "Điền" vào bản đồ bất kỳ hình ảnh. Để thực hiện việc này, bạn cần thay đổi kích thước hình ảnh bằng 120x64 pixel, xoay hình ảnh ngược chiều kim đồng hồ 90 độ và phản chiếu theo chiều dọc. Giảm độ sáng của hình ảnh, vì đèn LED rất sáng. Để làm điều này, tốt hơn là sử dụng hiệu chỉnh gamma với hệ số 0,45.
Lưu hình ảnh dưới dạng BPM 24 bit không nén. Sau tất cả các thao tác, tệp đầu ra sẽ có kích thước 23094 byte.



