

Hôm nay, tác giả của Instructables dưới biệt danh Techgenie đã nói về nơi điện tử có Và anh ấy đã mang một liên kết đến đầu tiên, trong đó không phải - chỉ có một thợ điện. Nó thanh lịch hơn, và nó sẽ được thảo luận trong bản dịch của tôi.
Nếu bạn vẫn không muốn có một cái, hãy xem video và chúc thiết bị này đến nhà bạn ngay từ những giây đầu tiên xem:
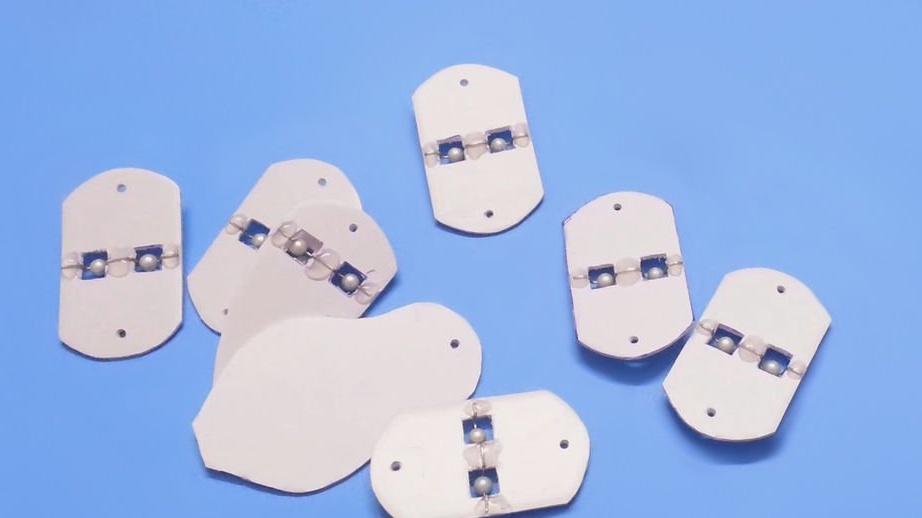
Bậc thầy cắt đứt các liên kết của con rắn robot từ bìa cứng:
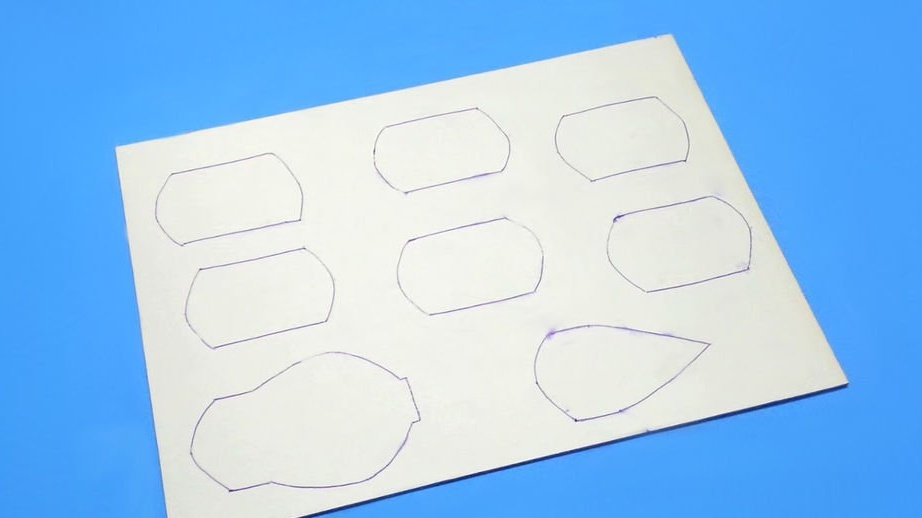
Trích xuất từ một tờ:

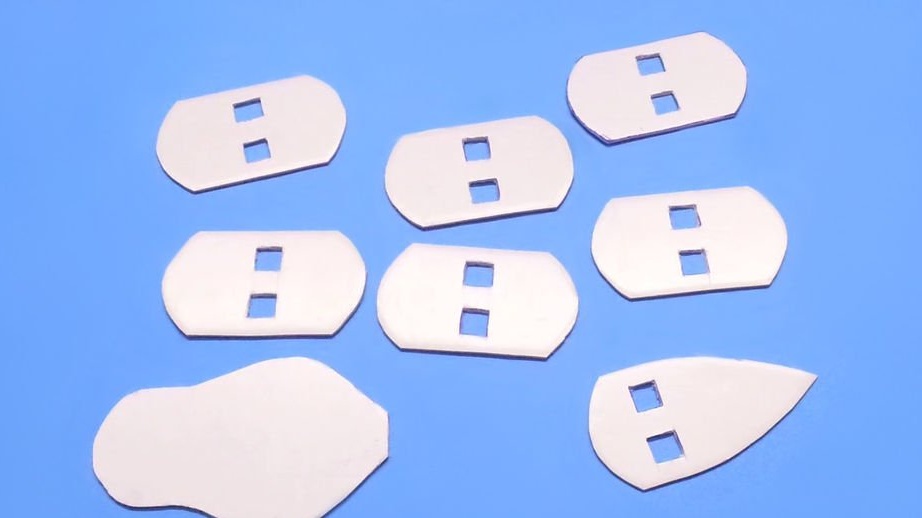
Tạo các lỗ vuông cho con lăn trong đó:
Mà làm bằng hạt và kẹp giấy, lời chào "DU Vasily Biletsky":
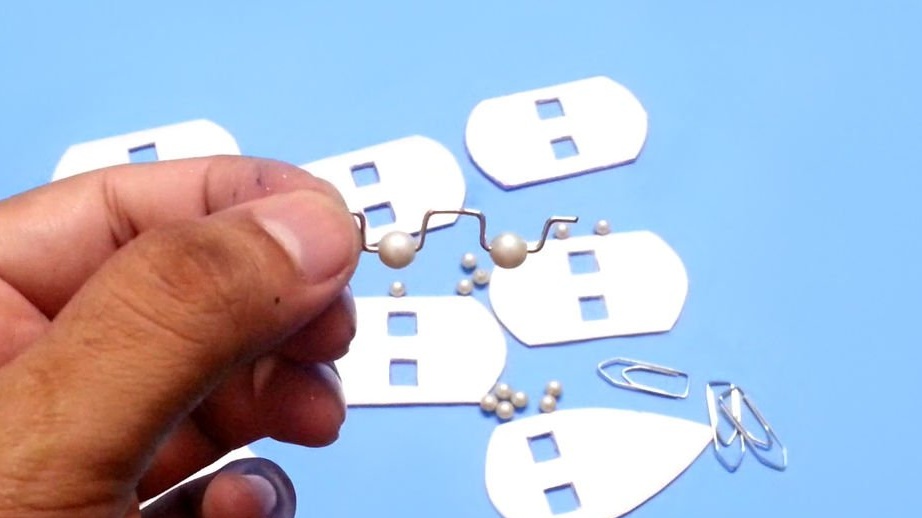
Cố định trục của các con lăn bằng súng bắn keo, đảm bảo rằng các con lăn không bị kẹt bằng keo. Khoan lỗ để kết nối liên kết:
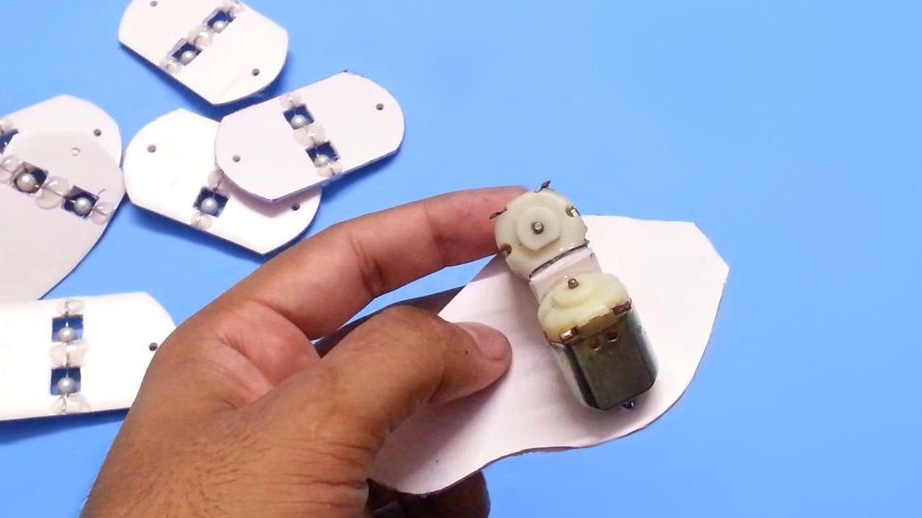
Tuân thủ giá đỡ hình tam giác cho động cơ DC:

Áp dụng động cơ, lưu ý nơi khoan lỗ cho trục, khoan, trục ren, động cơ keo:
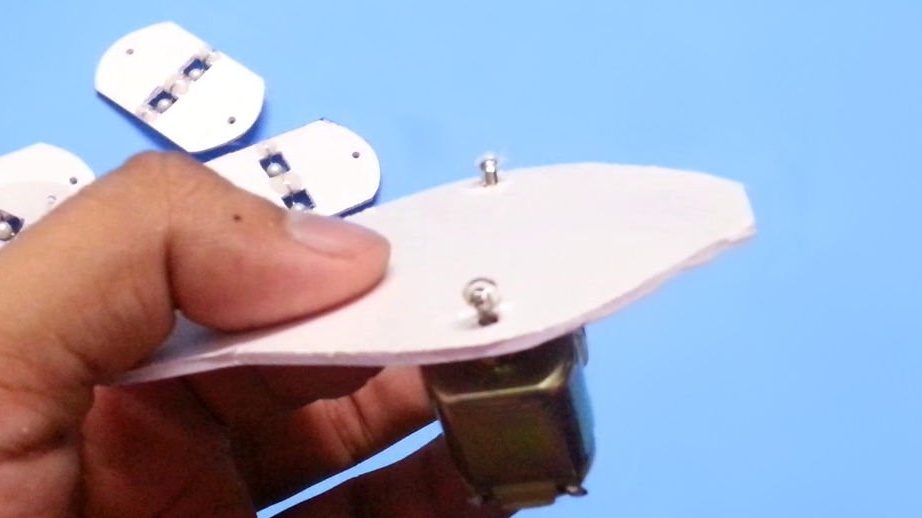
Trên trục của động cơ làm cho các quả bóng dính nóng chảy:
Kết nối các liên kết với ... dây và nút:
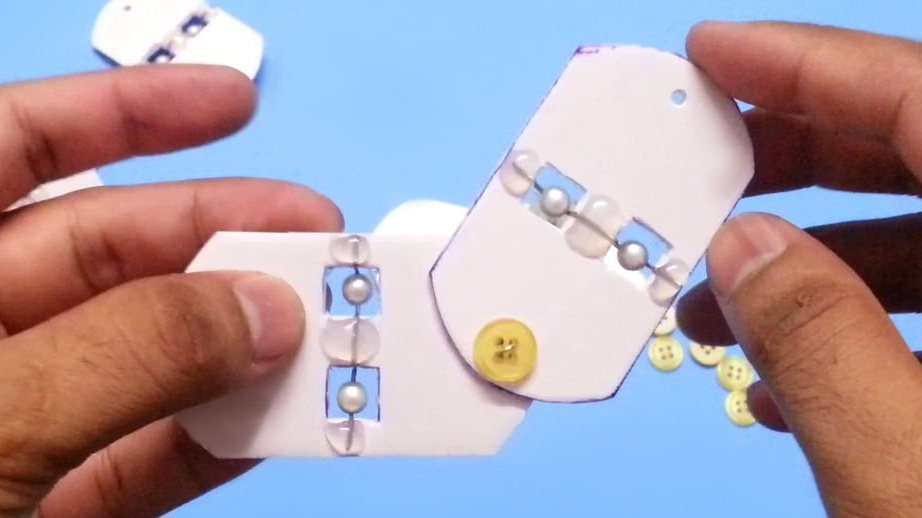
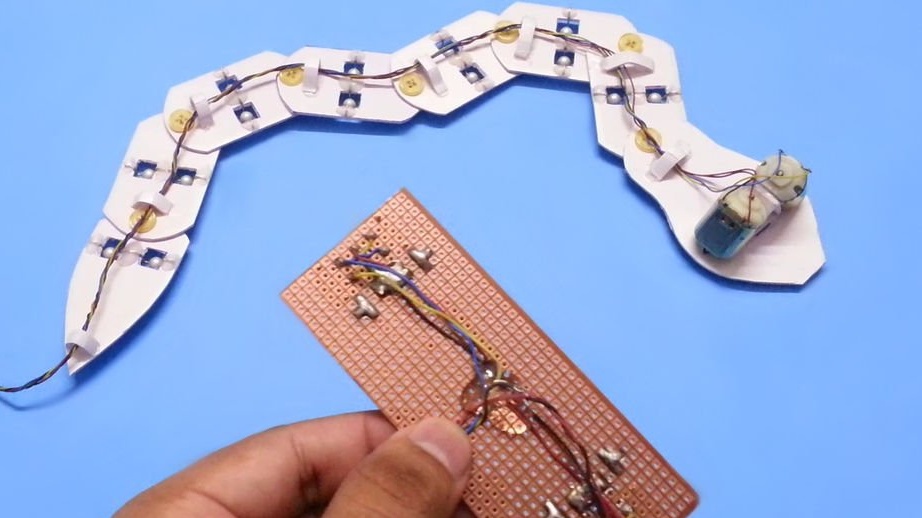
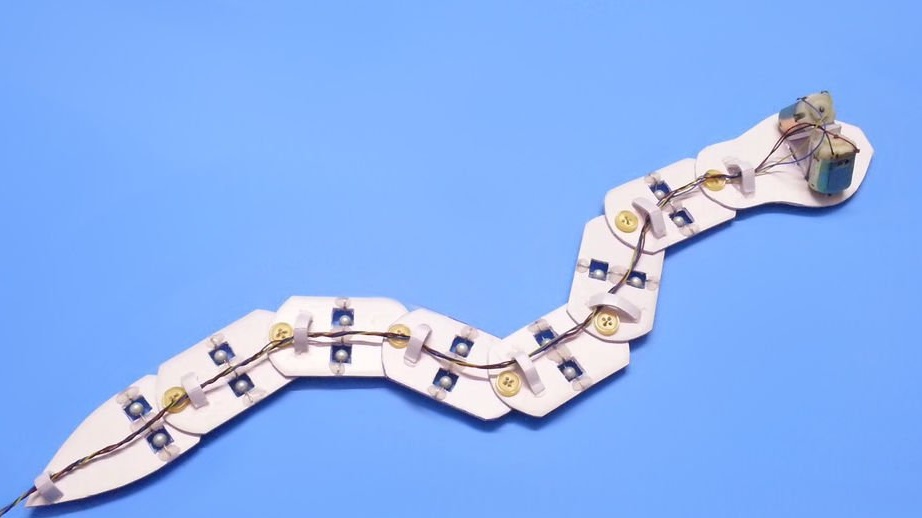
Con rắn robot được lắp ráp, nhưng nó vẫn bất động:

Anh ta cắt các dải bìa cứng, lấy một sợi cáp bốn dây, bán hai dây cho mỗi động cơ, sửa nó bằng dải thứ nhất:

Và phần còn lại:
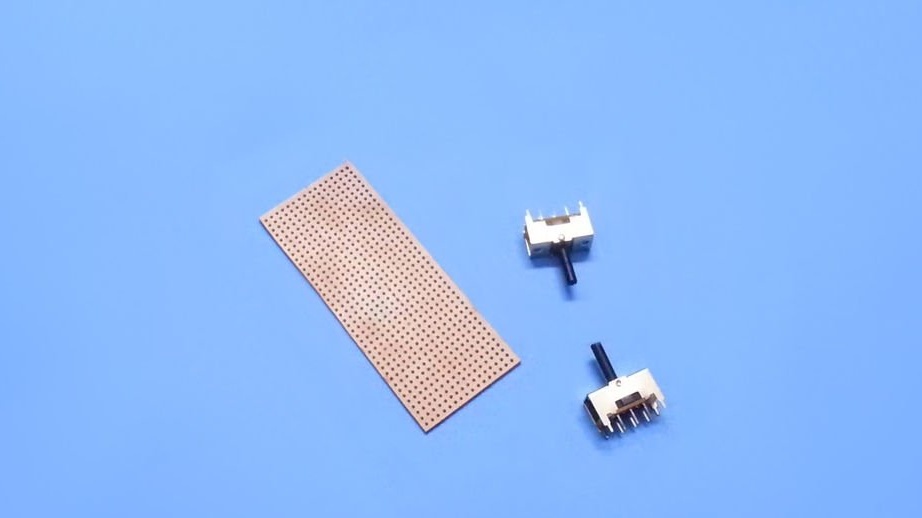
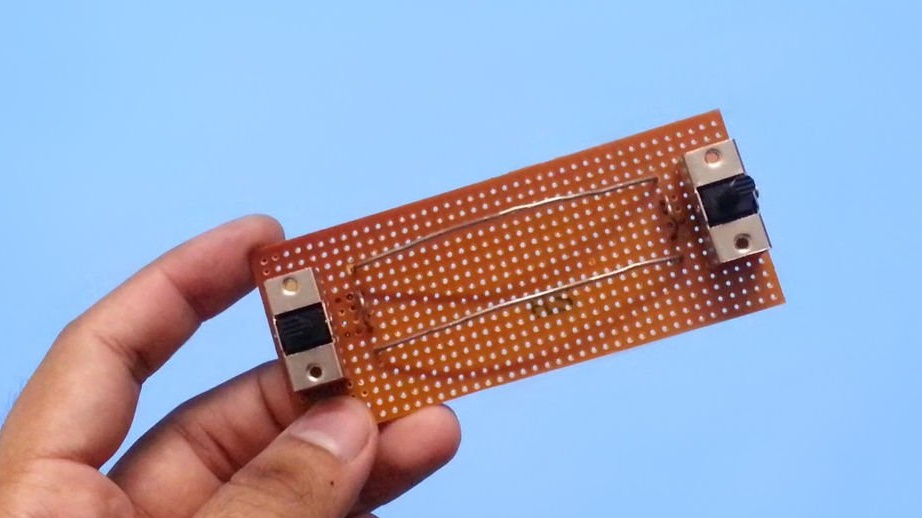
Phải mất hai công tắc đến ba vị trí (từ giữa đến tắt) và hai hướng, cũng như một phần của bảng mạch bánh kiểu perfboard:
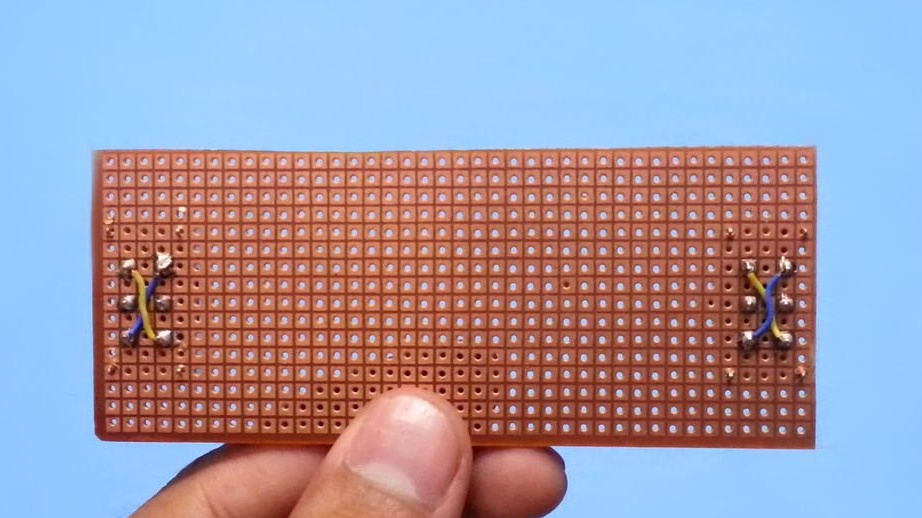
Sử dụng jumper, biến cả hai công tắc thành công tắc đảo ngược:
Anh ta tạo ra lò xo cho pin 18650 từ kẹp giấy, đặt nó. Hãy làm điều đó! Lấy ngăn xong! Chỉ sử dụng pin với bảo vệ! Tốt hơn nữa, một ngăn cho 2 chiếc. AA hoặc AAA với các tế bào hoặc pin thích hợp.
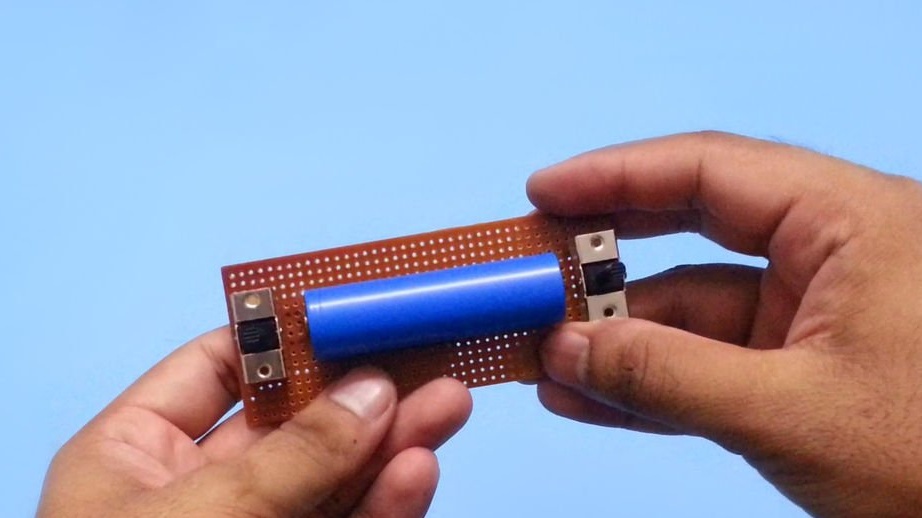
Mặt hàng chủ lực theo chiều dọc bổ sung để giữ pin đúng vị trí:
Vì vậy, trong khi mặt sau của bảng điều khiển từ xa trông:
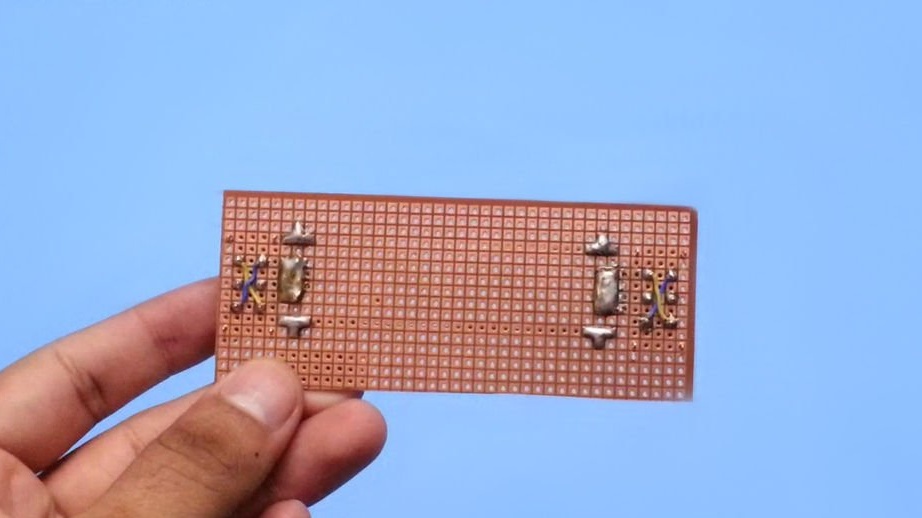
Bậc thầy kết nối cáp của robosnake, thực hiện kết nối theo sơ đồ:

Bây giờ mặt trái của bảng điều khiển từ xa trông khác nhau. Cáp được cố định bằng keo nóng chảy, điều quan trọng là có một lớp cách điện của chất kết dính này giữa nó và bảng điều khiển. Bây giờ phía bên này của bảng cần được phủ một lớp điện môi, vì các xung tự cảm ứng xảy ra khi tắt động cơ.
Điều đó đã hoàn tất

Do các tính năng thiết kế của robosnake, với cùng một vị trí công tắc, các động cơ phải quay theo hướng ngược lại. Nếu đây không phải là trường hợp, một trong số họ phải được đảo ngược. Sau đó, thử nghiệm chọn vị trí của điều khiển từ xa, trong đó vị trí chuyển tiếp của cả hai công tắc tương ứng với chuyển động về phía trước. Động cơ có thể được dừng lại và đảo ngược một cách riêng biệt, buộc robosnake phải thực hiện các thủ thuật khác nhau.