

Các độc giả chú ý nhận thấy rằng trong các bài viết của tác giả Instructables có biệt danh WilkoL về bộ tạo ngã ba điều chỉnh và đồng hồ có công dụng của nó, chỉ có một máy đo tần số được hiển thị, và trong bài viết về máy phát có kính là phần tử cài đặt tần số, người thứ hai đã được thêm vào nó. Câu chuyện này là về anh ấy.
Tôi rất vui khi làm việc tự làm bậc thầy bắt đầu với việc nghiên cứu phần lý thuyết, cụ thể là với sự lựa chọn phương pháp đo tần số. Trong nhiều máy đo tần số, số chu kỳ của tín hiệu đầu vào trong một khoảng thời gian nhất định, giả sử, một giây, được tính cho điều này:
Phương pháp này tốt cho tần số đủ cao, nhưng nếu tần số thấp, nó không cho phép thu được số lượng thập phân đủ lớn. Ví dụ: nếu chu trình đo mất một giây, thì với tần số của thứ tự là 50 Hz, sẽ không có số thập phân nào. Bạn muốn, ví dụ, ba dấu hiệu - có một lối thoát, chúng tôi mở rộng chu kỳ đo đến 1000 giây. Nhưng đó là một điều khi PC hoặc điện thoại thông minh chậm lại, điều mà ít nhất mọi người đều quen thuộc, và nó lại là một điều hoàn toàn khác - nếu một máy đo tần số cũng tham gia vào công ty thú vị này, điều này sẽ hoàn toàn đánh bật người dùng khỏi nó. Nói chung, một cách khác là cần thiết. Nhưng nếu chúng ta đo thời gian dao động, như thế thì sao?
Vì vậy, làm quá. Họ lấy tín hiệu của tần số tham chiếu, cao hơn một vài bậc so với tần số đo và xem xét có bao nhiêu chu kỳ của tín hiệu tham chiếu sẽ vượt qua trong một khoảng thời gian của tín hiệu đo. Vì vậy, ví dụ, với tần số tham chiếu là 10 MHz và được đo ở tần số 50 Hz, con số này sẽ là 200.000. Điều này có nghĩa là khoảng thời gian là 20.000,0 ms và một vi điều khiển hiện đại (và, không phải), nếu lập trình viên "dạy" nó, với dễ dàng kể lại khoảng thời gian đến tần số bằng 50.000 Hz. Nếu tần số tăng lên 50.087 Hz, thì trong một khoảng thời gian của tín hiệu đầu vào, 199650 chu kỳ của mẫu phù hợp và thay đổi như vậy, máy đo tần số sẽ nhận thấy trong thời gian thực.
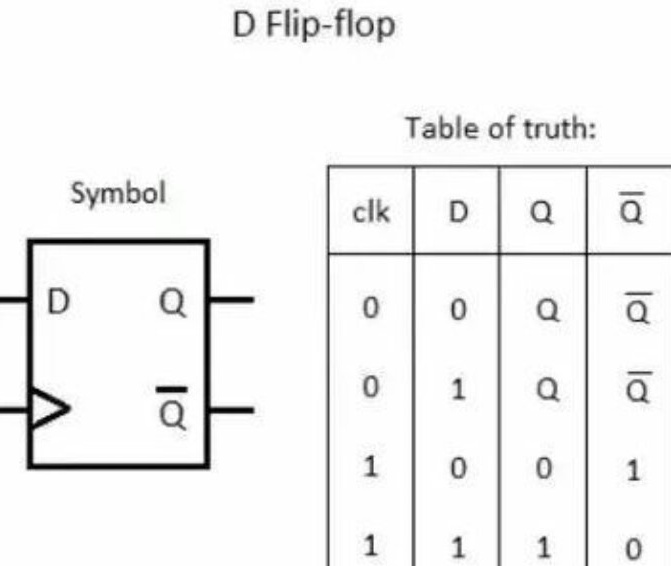
Nhưng với phương pháp đo này, số lượng vị trí thập phân, ngược lại, giảm dần theo tần số của tín hiệu đầu vào. Ví dụ: nếu là 40 kHz và tham chiếu vẫn là 10 MHz, thì tại 40-161 Hz, chúng ta có được 249 chu kỳ tần số tham chiếu và ở 39840 Hz - 251 chu kỳ. Ít nhất hai máy đo tần số theo thứ tự: một cho tần số cao, hoạt động theo cách thứ nhất, một cho tần số thấp, trong lần thứ hai. Mặc dù - chờ đã! Có thể kết hợp cả hai phương pháp trong một máy đo tần số không? Bạn có thể, và chủ nói cho biết làm thế nào. Bạn cần phải có một trình kích hoạt D thông thường, sau đó biểu tượng của nó và bảng chân lý được đưa ra:
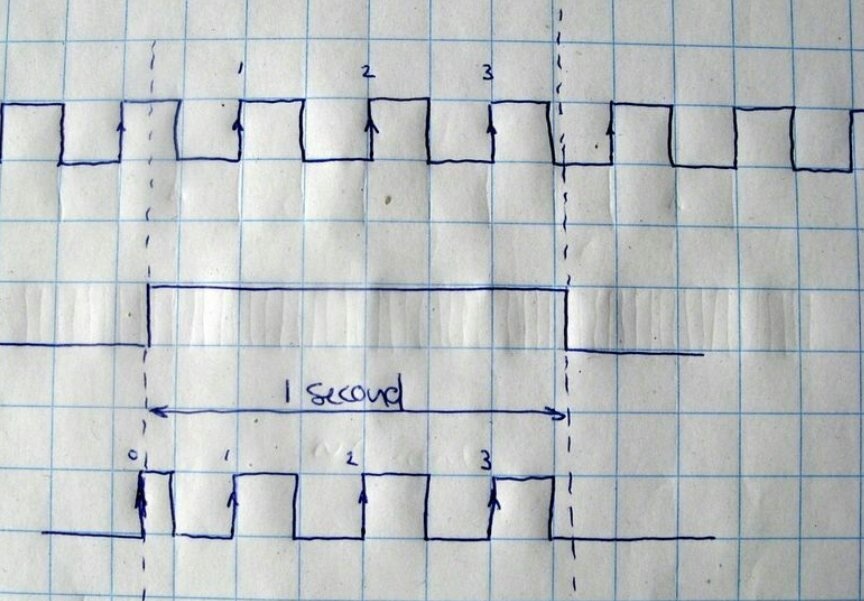
Trình hướng dẫn hiển thị bốn tín hiệu trên biểu đồ, tín hiệu thứ tư tạo ra trình kích hoạt:
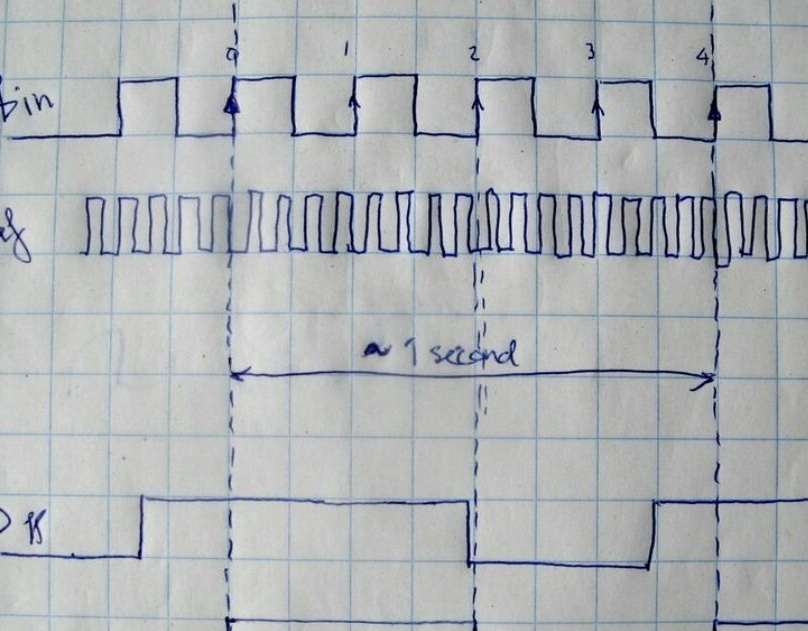
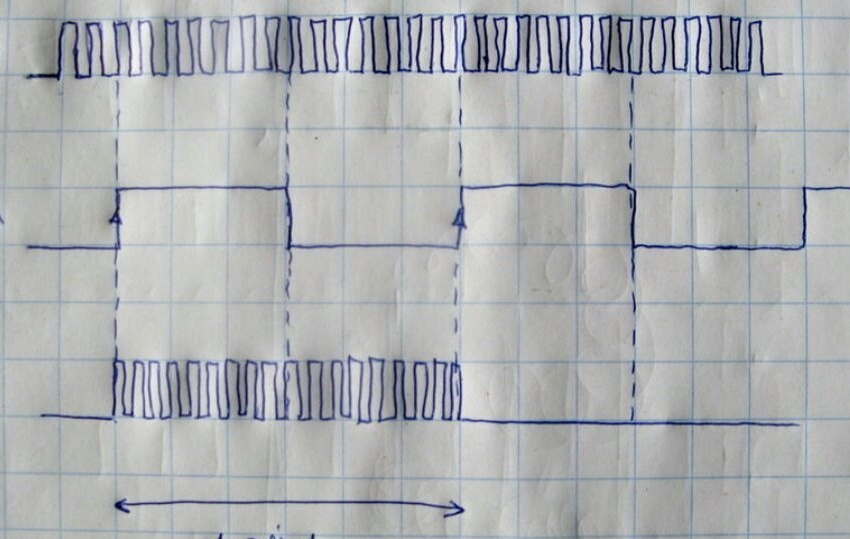
Tín hiệu đầu tiên trong số này là tần số đo được, nó được đưa đến đầu vào xung nhịp của bộ kích hoạt D. Thứ hai là tần số tham chiếu, ví dụ, một lần nữa là 10 MHz, đòi hỏi độ ổn định cao. Thứ ba là tín hiệu có tần số 1 Hz, độ ổn định không cần thiết, nó được áp dụng cho cùng một bộ kích hoạt ở đầu vào D. Chà, thứ tư được tạo bởi bộ kích hoạt từ bộ thứ nhất và thứ ba như sau. Khi tín hiệu thứ ba chuyển từ 0 sang một, bộ kích hoạt không phản hồi ngay lập tức, mà chỉ khi một công tắc như vậy xảy ra với tín hiệu đầu tiên sau đó. Do đó, mặt trước của một trong các xung của tín hiệu thứ tư trùng khớp chính xác với mặt trước của một trong các xung của tín hiệu thứ nhất. Sau đó, tín hiệu thứ ba, tiếp theo là tín hiệu thứ tư, chuyển sang 0, mà vi điều khiển không phản ứng theo bất kỳ cách nào, sau đó tín hiệu thứ ba chuyển trở lại thành một, nhưng kích hoạt không phản ứng lại ngay lập tức mà chỉ sau khi chuyển đổi cùng một tín hiệu đầu tiên. Và một lần nữa, mặt trước của tín hiệu thứ nhất và thứ tư hoàn toàn trùng khớp. Và trong toàn bộ thời gian của tín hiệu thứ tư phù hợp với số nguyên của các khoảng thời gian đầu tiên. Hơn nữa - một vấn đề kỹ thuật: đừng quên rằng chúng tôi cũng có tín hiệu thứ hai. Bộ vi điều khiển tính toán có bao nhiêu chu kỳ đầy đủ của tín hiệu thứ nhất và thứ hai giảm trong toàn bộ thời gian thứ tư.
Vì vậy, chúng tôi có hai số. Ví dụ: 32 và 10185892. Nhân 32 với 10.000.000 (tần số tham chiếu) và chia cho 10185892. Chúng tôi nhận được 31.416 Hz. Ba chữ số thập phân. Và phép đo vẫn chính xác cả ở tần số thấp và cao, khi tiếp cận mô hình. Và nếu bạn cần đo tần số cao hơn nữa, bạn có thể thêm một bộ chia.
Bây giờ chúng ta cần quyết định xem vi điều khiển nào sẽ chạy máy đo tần số. Bậc thầy đã cố gắng tạo chúng trên ATmega328 và thậm chí trên STM32F407, chạy ở tần số xung nhịp 168 MHz. Nhưng lần này anh ta thấm nhuần chủ nghĩa tối giản và quyết định kiểm tra xem anh ta có thể nhận được kết quả tương tự trên ATtiny2313 hay không.
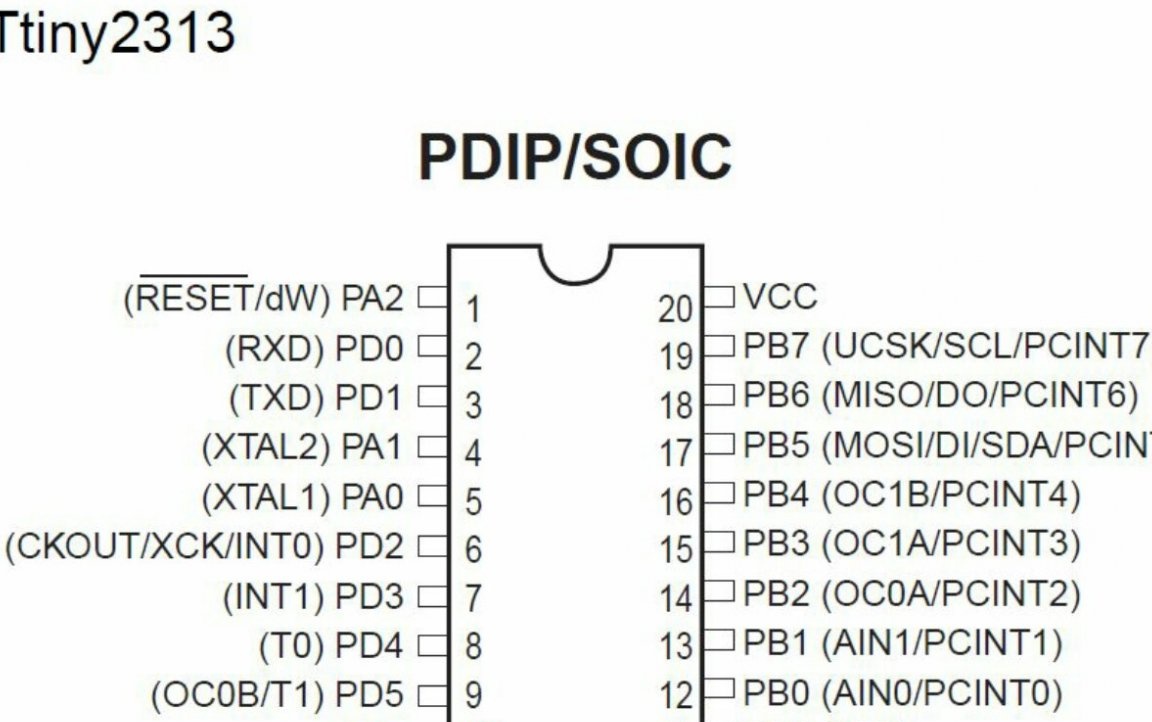
Anh ta có quá nhiều kết luận, đặc biệt nếu bạn sử dụng màn hình LED với chip điều khiển tích hợp như MAX7219:

Một sơ đồ thiết bị hoàn chỉnh trông như thế này:
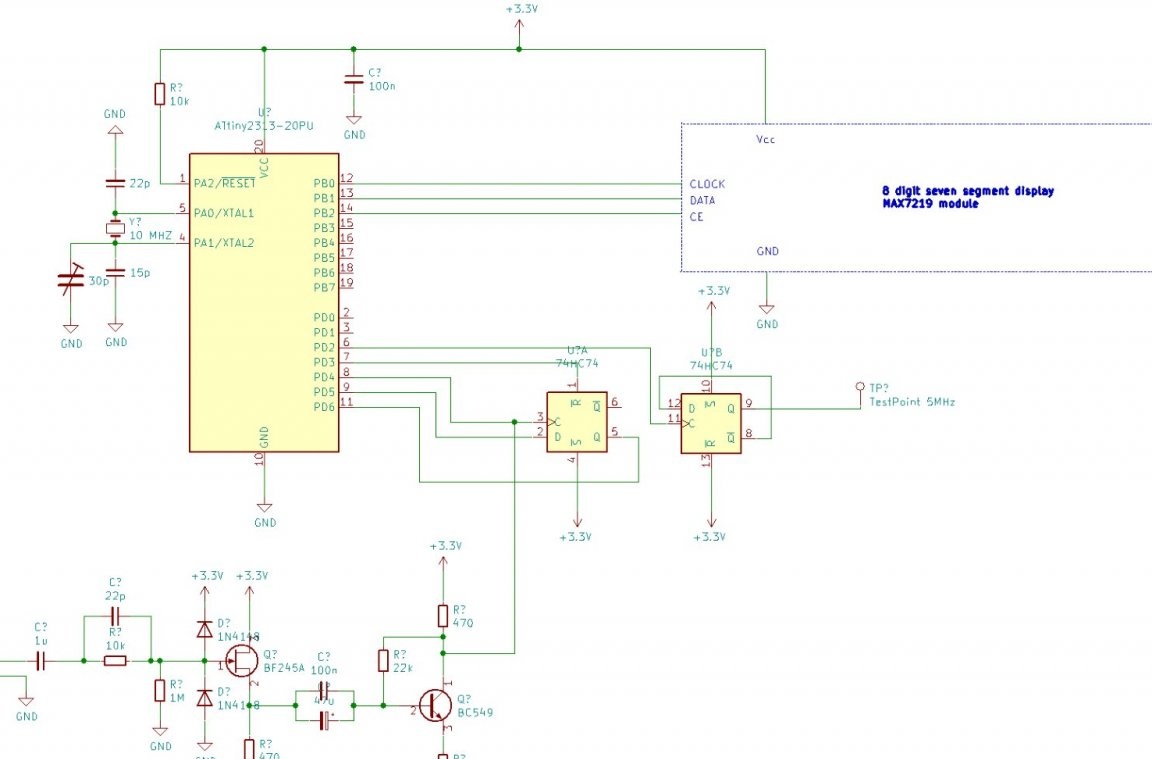
Một trình điều khiển khá phức tạp cho các thành phần riêng biệt, chứa các mạch RC, bộ giới hạn diode, các tầng khuếch đại, được sử dụng để thu được các xung hình chữ nhật từ tín hiệu có hình dạng gần như bất kỳ. Bộ kích hoạt D được đặt bên ngoài, tín hiệu tần số đo được (đầu tiên) được cung cấp cho nó từ trình điều khiển, tín hiệu có tần số 10 MHz và 1 Hz (thứ hai và thứ ba) được nhận từ vi điều khiển, tín hiệu đầu ra (thứ tư) quay trở lại vi điều khiển. Bộ kích hoạt thứ hai như vậy phục vụ để tạo tín hiệu tại điểm kiểm soát. Đề án PDF tương tự trong kho lưu trữ ZIP có sẵn. ở đây.
Sau khi biên soạn một sơ đồ, chủ nhân thu thập một máy đo tần số trên đó, hóa ra như thế này:
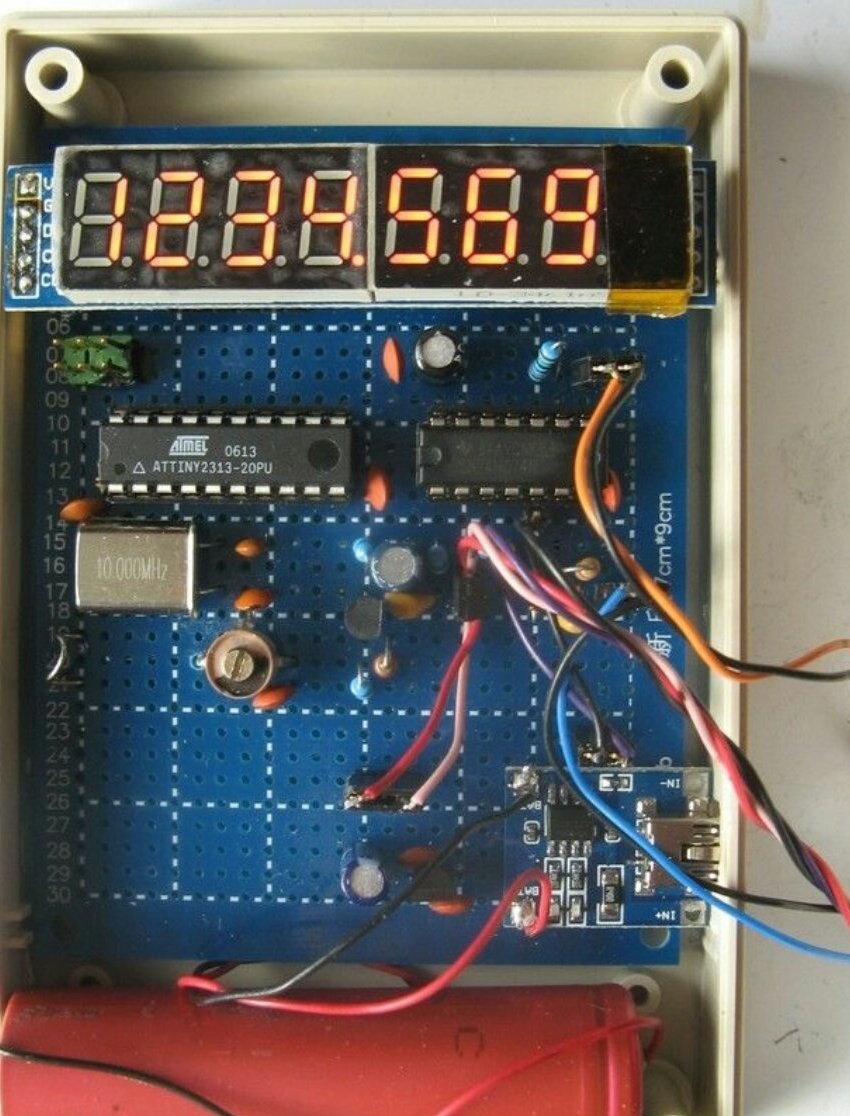
Trong ảnh, không giống như mạch, bộ điều khiển pin và sạc được hiển thị, bộ ổn định xung cũng được chủ nhân đề cập, nhưng ở đâu thì không nhìn thấy được. Tất cả các thành phần này đã được thêm vào sau đó, giúp làm việc với máy đo tần số thuận tiện hơn. Một pin 18650 nên được thực hiện với bảo vệ, hàn dây đến nó là không thể chấp nhận. Hoặc là ngăn hoặc hàn điểm.
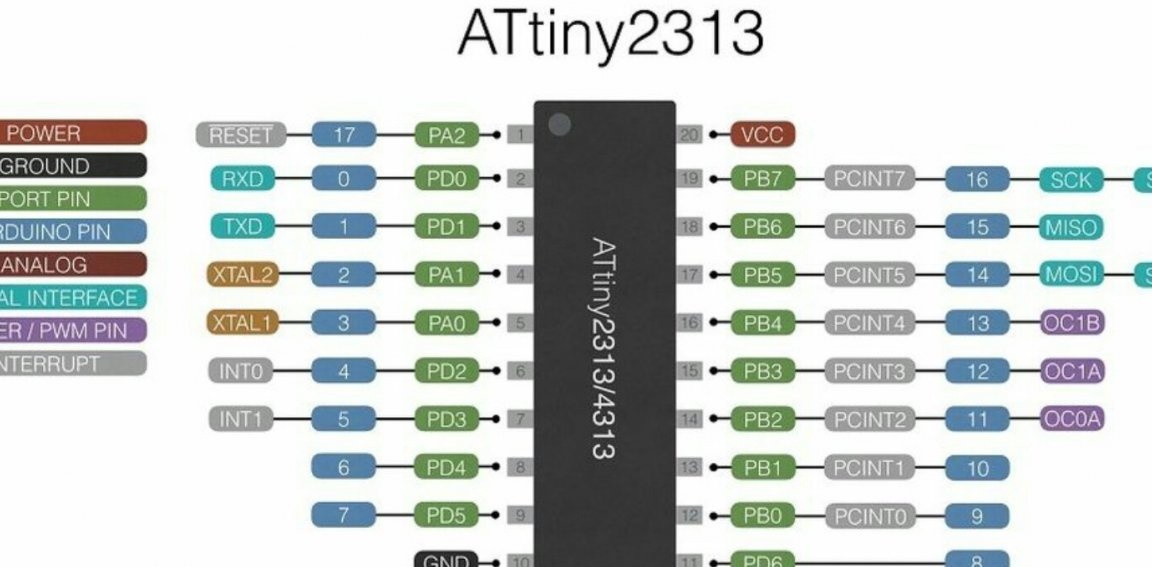
Chương trình cơ sở (nói dối ở đây cũng trong kho lưu trữ ZIP), bậc thầy viết có tính đến nhu cầu chuyển vi điều khiển từ đồng hồ sang máy phát RC để làm việc từ thạch anh bên ngoài, cũng như khả năng gán các chức năng khác nhau cho từng đầu ra của vi mạch:
Để tải lên chương trình cơ sở, trình hướng dẫn cần một lập trình viên mạch từ Olimex. Đây là một công ty Bulgaria có hồ sơ gần với Adafbean.

Bậc thầy niêm phong chất thải nhỏ trên màn hình, và sau đó cắt một lỗ trên nắp vỏ để chất thải này được đóng lại, vì các số đọc của nó không chính xác mặc dù đã áp dụng tất cả các biện pháp.Điều này bị ảnh hưởng bởi các tính năng của thuật toán và độ ổn định nhiệt độ không quá cao của bộ dao động tinh thể. Để thiết lập nó, thiết bị chính kết nối máy đo tần số ngoài với điểm điều khiển với bộ ổn định tần số của bộ tạo xung nhịp từ bộ thu GPS, sau đó nó đặt chính xác 5 MHz bằng cách xoay tụ điều chỉnh (bộ kích hoạt chia tần số xung nhịp cho hai). Máy đo tần số được điều chỉnh chính xác cung cấp độ chính xác cần thiết trong dải tần số đo được từ 0,2 Hz đến 2 MHz. Hai ảnh sau đây cho thấy cách tổng thể đồng thời áp dụng cùng một tín hiệu cho đồng hồ đo tần số tham chiếu và kiểm tra:

