

Chúc mừng cư dân của trang web của chúng tôi!
Lần này AlexGyver, tác giả của kênh YouTube cùng tên, về kỳ nghỉ, nhân tiện, chúng tôi không thực sự thích, quyết định lặp lại Dự án Adafbean - một con mắt bionic được đưa vào kính của thợ hàn khí.

Từ quan điểm của mã, dự án hoàn thành này hoàn toàn không thú vị, tác giả đã quan tâm đến cơ chế, cụ thể là hệ thống tọa độ của nó.
Chúng tôi sẽ trở lại vấn đề này, nhưng một lát sau, nhưng trước tiên, hãy thu thập tất cả các cơ chế và kết nối mọi thứ điện tử linh kiện.
Để lặp lại dự án này, bạn sẽ cần:
1) Kính thợ hàn khí. Bạn có thể sử dụng cả kim loại và nhựa.

Nhựa chắc chắn phù hợp hơn, nhưng tất nhiên họ không thể tự hào về chất lượng. Cụ thể, trong trường hợp này, làm bằng nhựa, các mặt theo nghĩa đen rơi ra ngay lập tức và tác giả đã phải dán chúng.

Kính như vậy có thể được mua tại các cửa hàng bán dụng cụ hoặc vật liệu xây dựng. Tác giả đã mua những thứ này trong cửa hàng All Cụ.
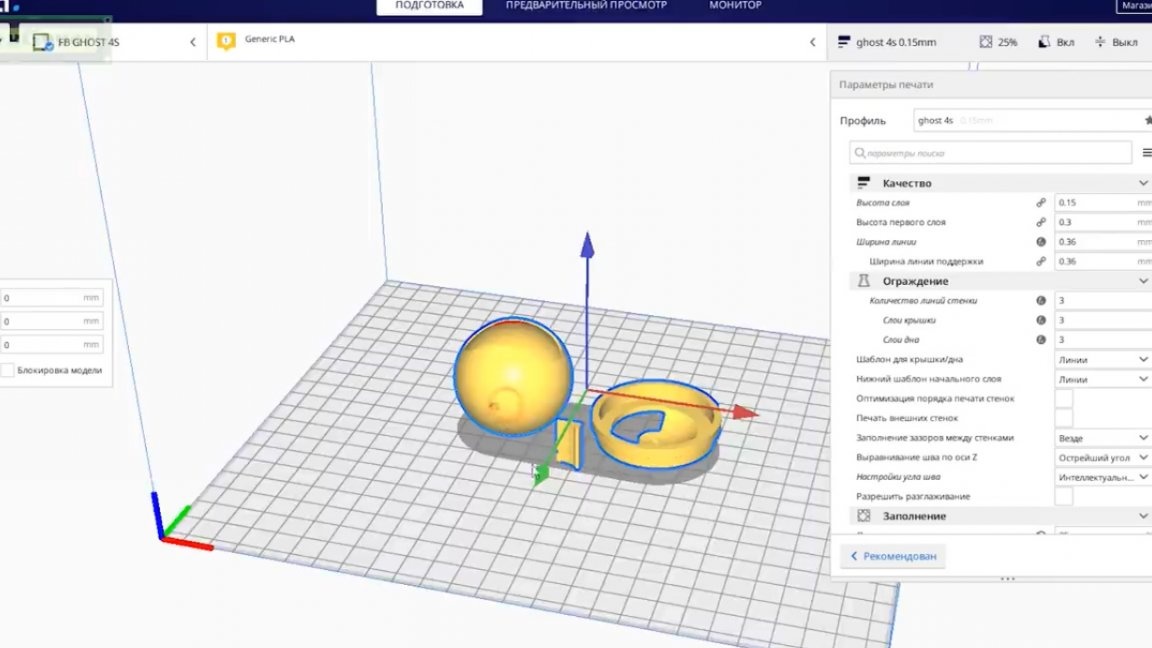
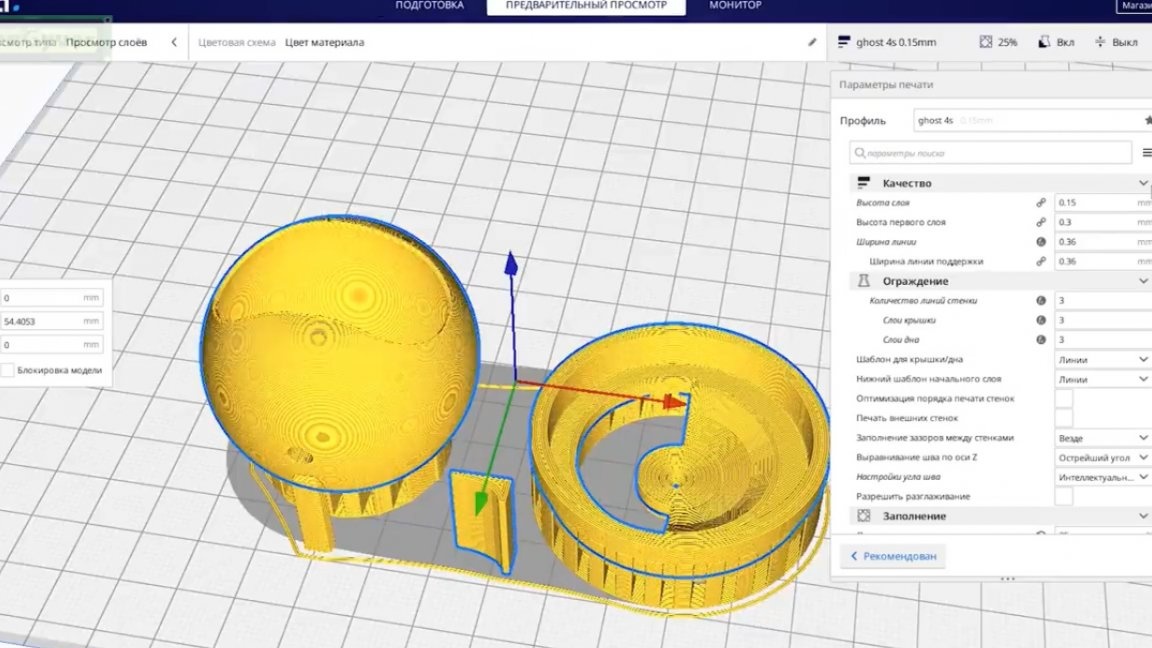
2) Tiếp theo chúng ta cần những thứ này được in trên Máy in 3D phụ tùng thay thế.
Tác giả đã in các yếu tố bằng nhựa PLA màu trắng trên máy in 3D Flyingbear ghost 4s mới 32 bit. Tập tin chứa tất cả 3 mô hình cùng một lúc. In ấn là cần thiết với sự hỗ trợ.

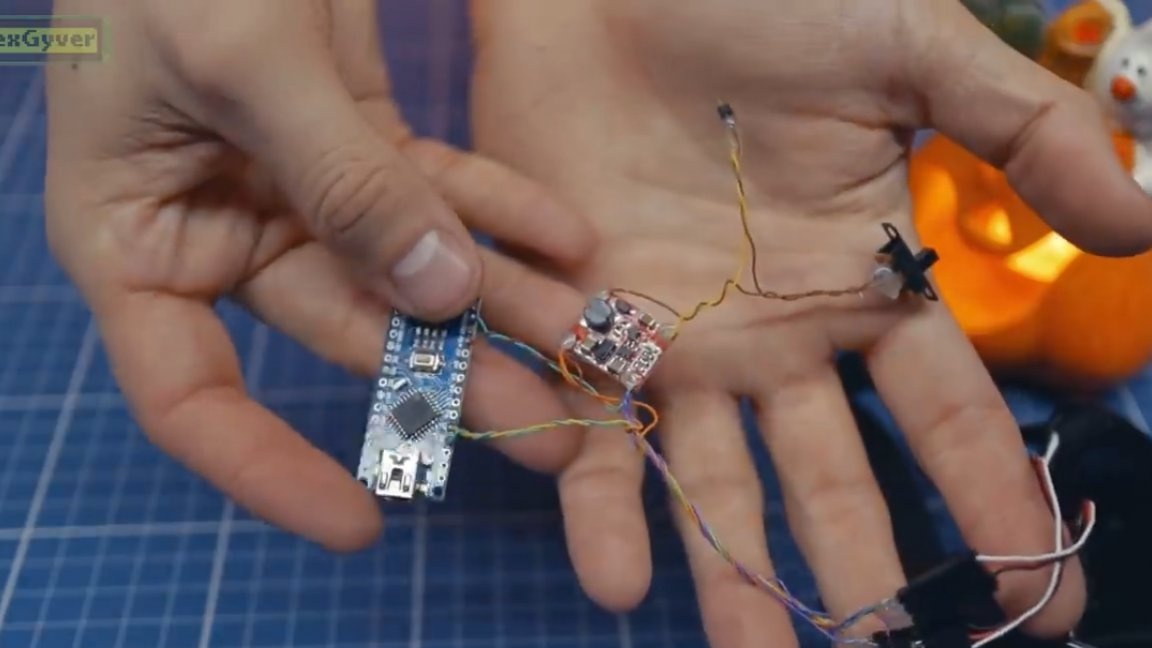
3) Thành phần tiếp theo cần thiết cho dự án đặc biệt Halloween của chúng tôi là nền tảng Mô hình Arduino Nano.

4) Cũng cần thiết pin lithium ion:
5) Tăng cường chuyển đổi dc-dc (lên đến 5V);
6) Chuyển đổi:

7) Vi mô, nhưng không chuẩn 9 gram, nhưng thậm chí còn ít hơn:
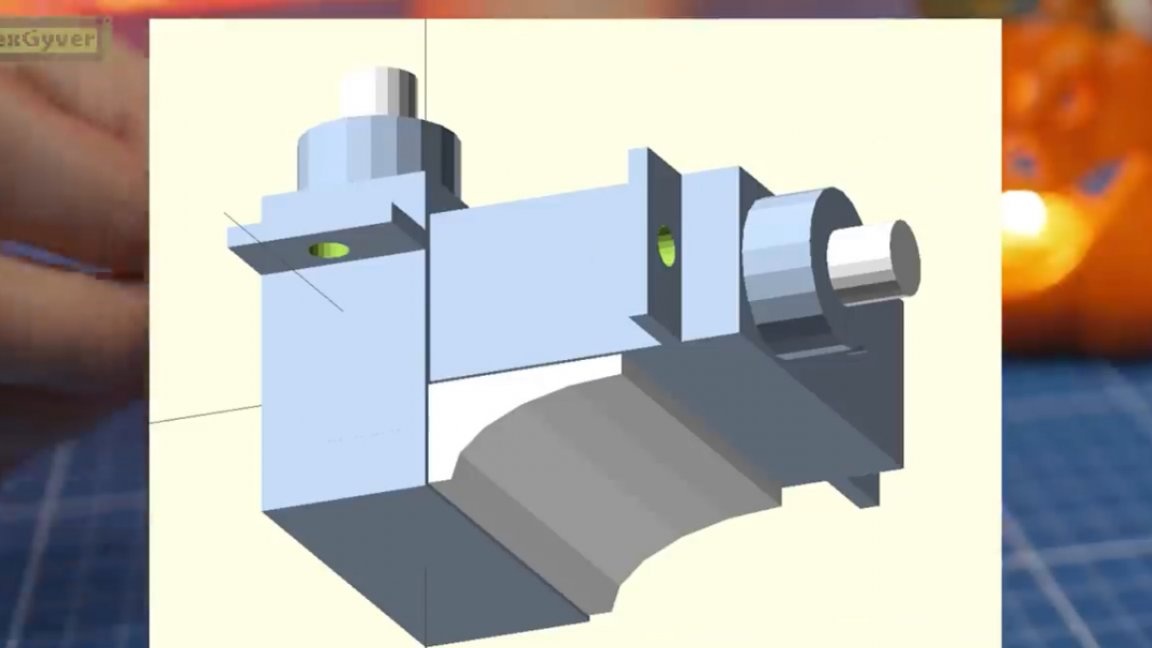
Vì vậy, với các thành phần cần thiết, đã tìm ra, hãy bắt tay vào lắp ráp thiết bị. Đầu tiên, chúng ta cần gắn các ổ đĩa như sau:
Đây là một hình ảnh dễ hiểu hơn:
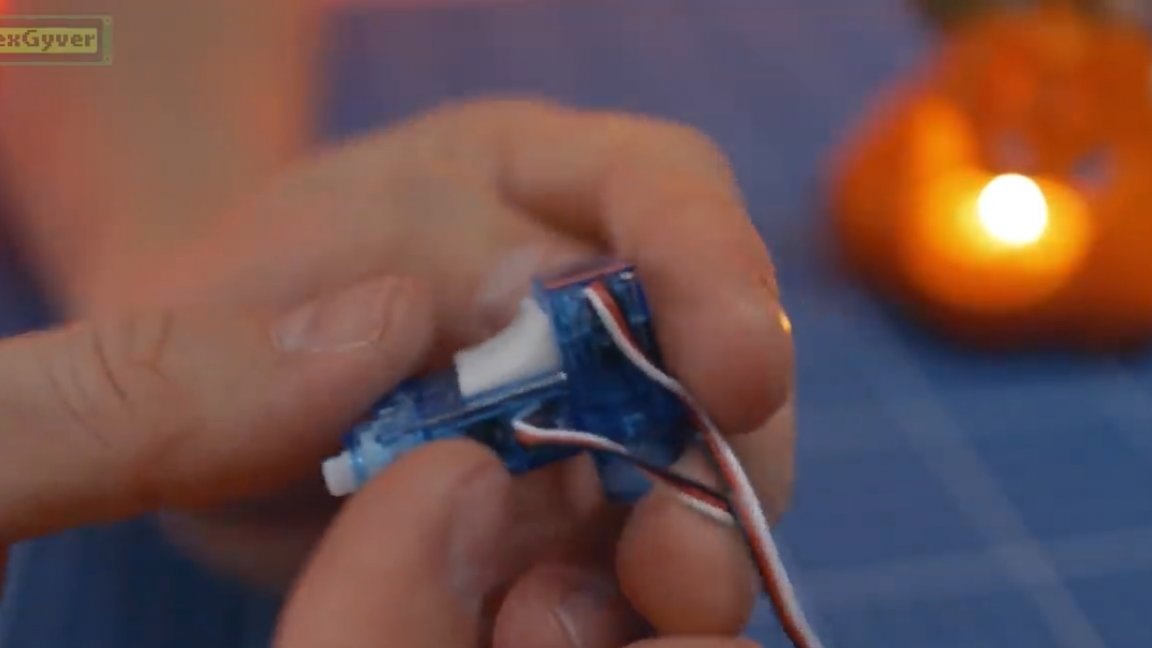
Chúng tôi xóa nhãn dán và với sự trợ giúp của superglue, chúng tôi kết nối toàn bộ điều này.


Nhân tiện, các servo của Trung Quốc có vẻ hơi khác so với Adafruth và bạn cần phải dán chúng như thế này, với một chút bù đắp:
Tai phải được loại bỏ, họ sẽ can thiệp.
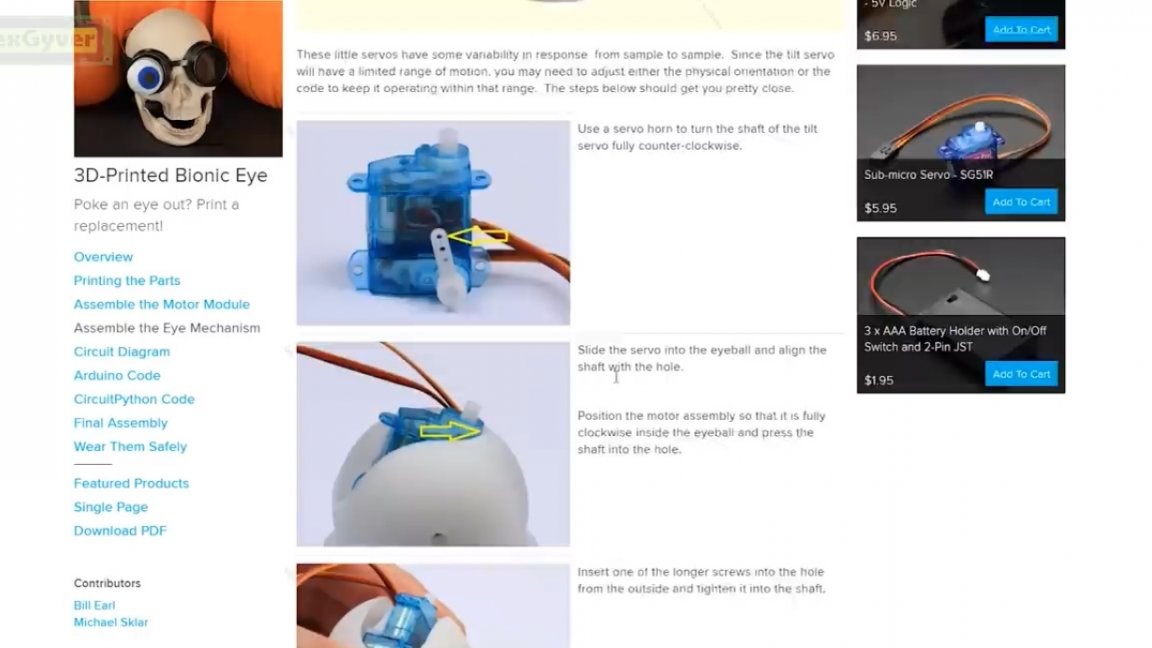
Sau đó đến ổ đĩa thấp hơn, chúng tôi móc rocker và xoay trục ngược chiều kim đồng hồ.

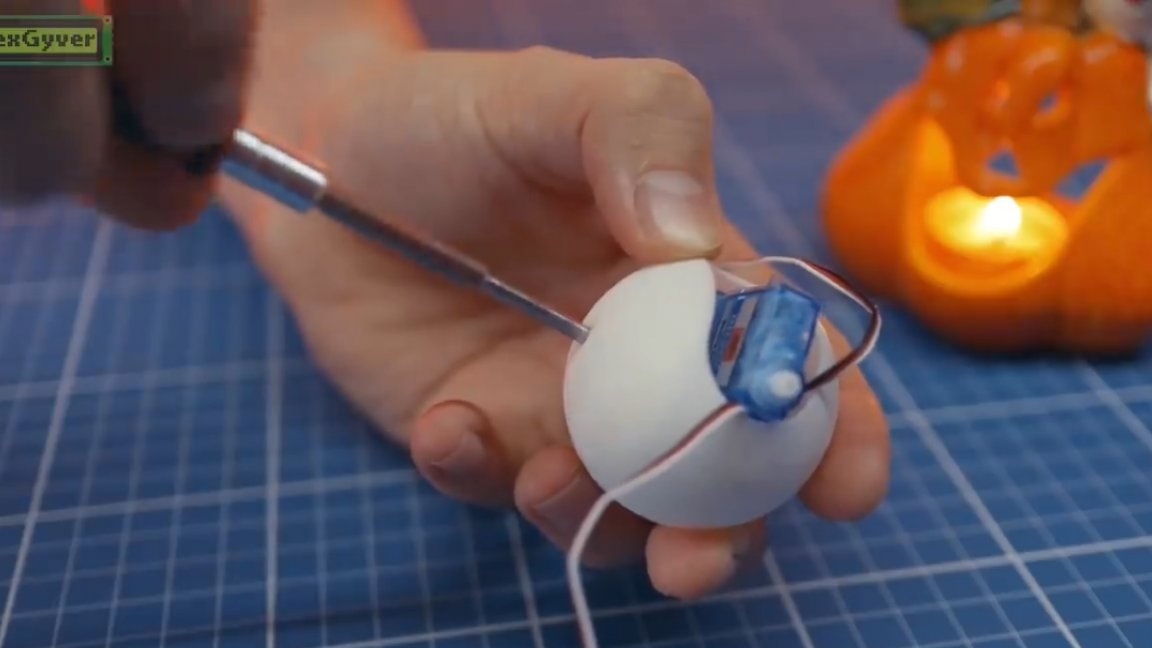
Chèn các servo vào bản in sẵn trên Máy in 3D trống (mắt).
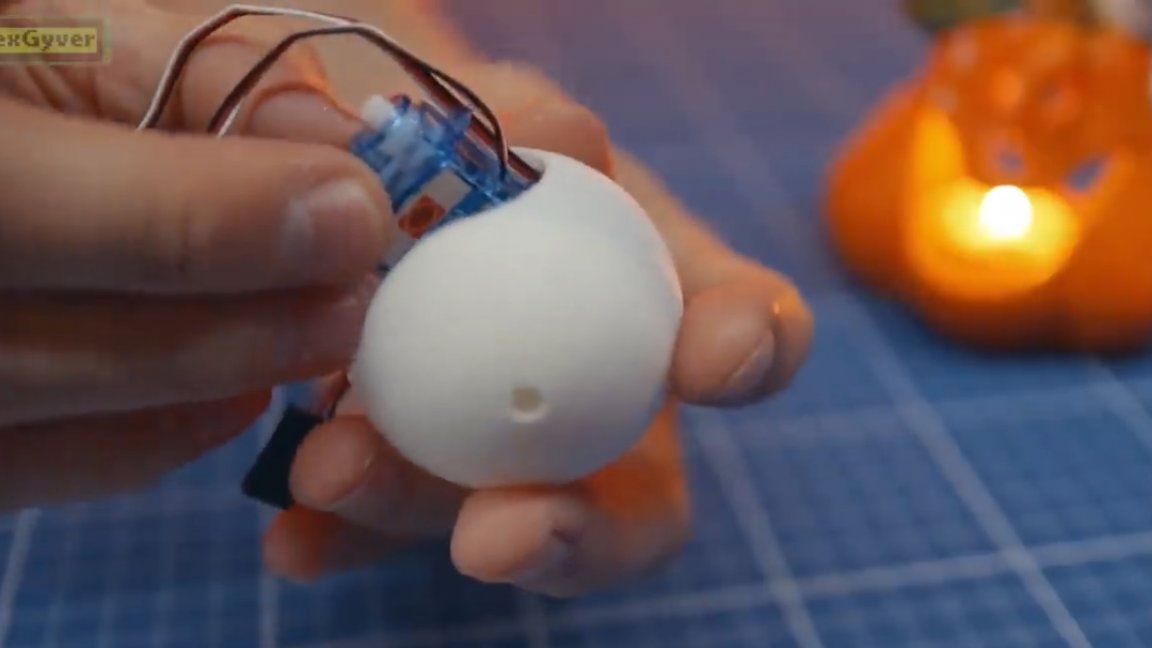
Chúng tôi đặt ổ đĩa nhô ra cạnh, và đưa trục đầu ra vào lỗ bên trong mắt.

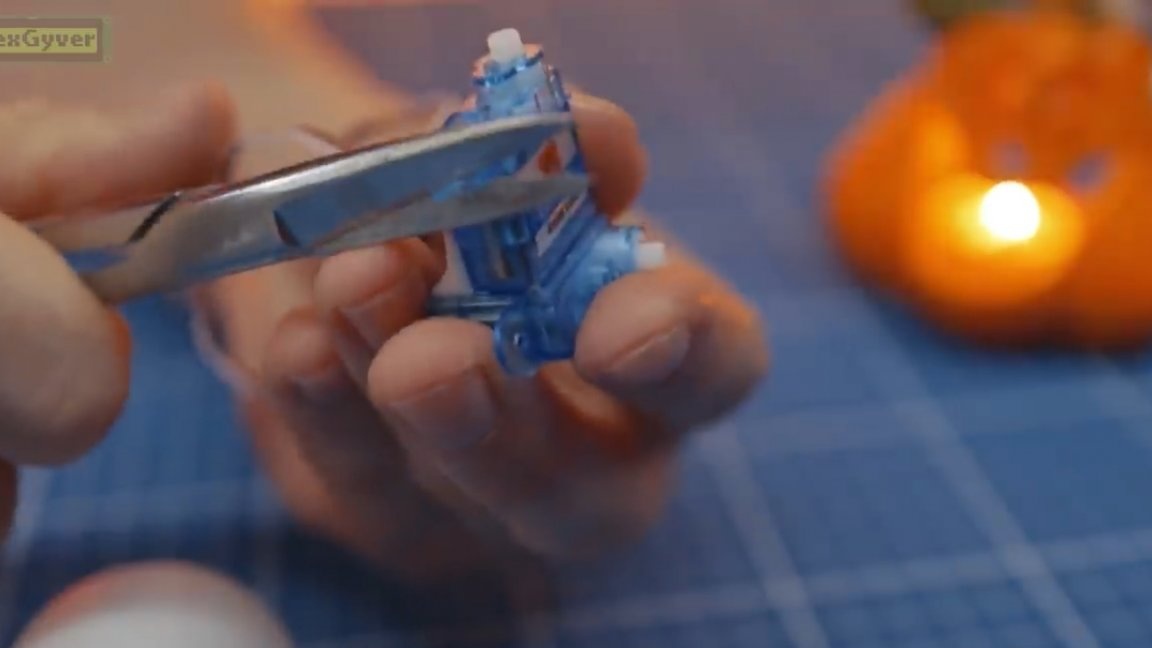
Các vít hoàn chỉnh dài cần phải được rút ngắn một chút. Điều này có thể được thực hiện bằng cách sử dụng kềm.

Sau đó, sử dụng một ốc vít rút ngắn, chúng tôi sửa chữa ổ đĩa trong.
Nếu bạn có máy kiểm tra servo, bạn có thể xác minh khả năng hoạt động của cơ chế kết quả.
Sau đó, chúng tôi gắn phần thứ hai của mắt vào trục của ổ đĩa thứ hai và cũng gắn chặt nó.

Chúng tôi bị thuyết phục về hiệu suất tổng thể (nên làm việc cùng nhau).


Đặc biệt đối với dự án này, tác giả đã viết một mã đơn giản giúp xoay các ổ đĩa một cách ngẫu nhiên. Nhưng trung tâm của mắt hơi thiên vị, vì vậy chúng tôi tìm trung tâm thực tế và vẽ con ngươi.

Chà, vì đây là một dự án kỳ nghỉ, và kỳ nghỉ khá cụ thể, vậy thì hãy làm cho nó trở nên khủng khiếp hơn một chút.

Tiếp theo, chèn phần kết quả vào kính.

Nếu nó không được chèn, cần phải vát một chút.

Sau đó, chúng tôi đặt mọi thứ lại với nhau.


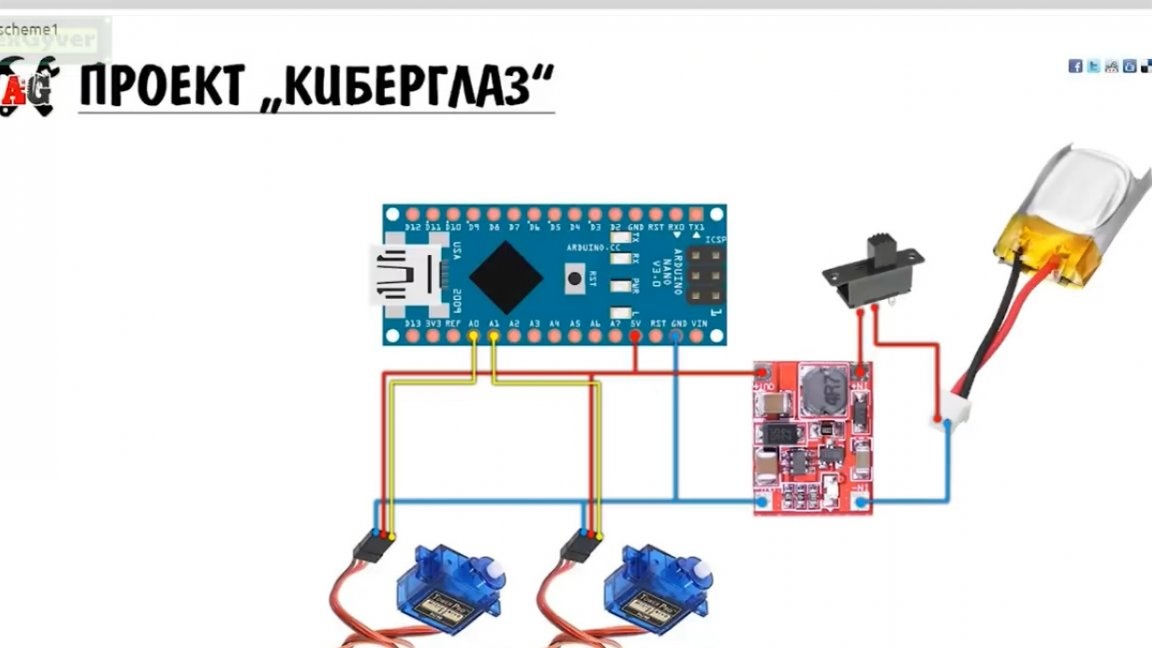
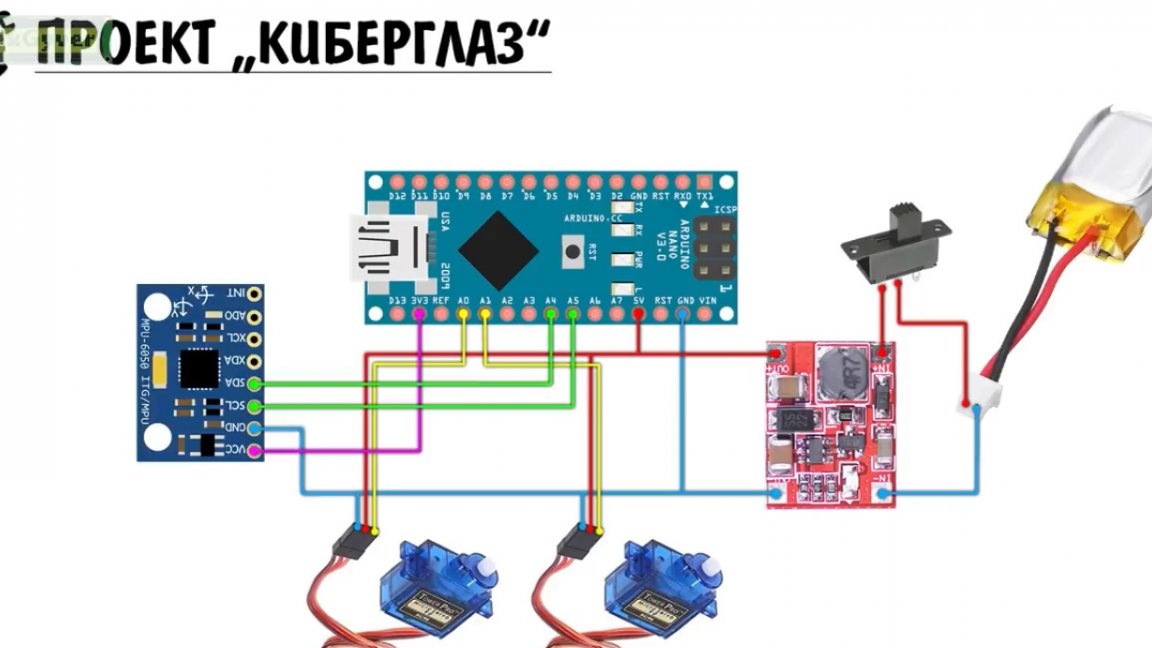
Tiếp theo, chúng tôi kết nối tất cả các thành phần theo sơ đồ sau:
Mọi thứ đã sẵn sàng, nhưng bây giờ chúng tôi có mọi ổ đĩa chỉ tăng lên một góc ngẫu nhiên, và về nguyên tắc bạn có thể để nó như thế.

Nhưng hãy nhớ ở đầu bài viết đã được đề cập về cơ chế và hệ tọa độ? Vì vậy, cơ chế quay dọc theo hai trục, nhưng không dọc theo trục mà mắt người xoay. Mục tiêu của chúng tôi là làm cho một cơ chế như vậy hoạt động chính xác như mắt người. Thoạt nhìn điều này có vẻ không thể, nhưng bạn có thể cố gắng đưa hệ tọa độ của nó trở lại bình thường để bạn có thể đặt con ngươi ở bất kỳ vị trí mong muốn nào.
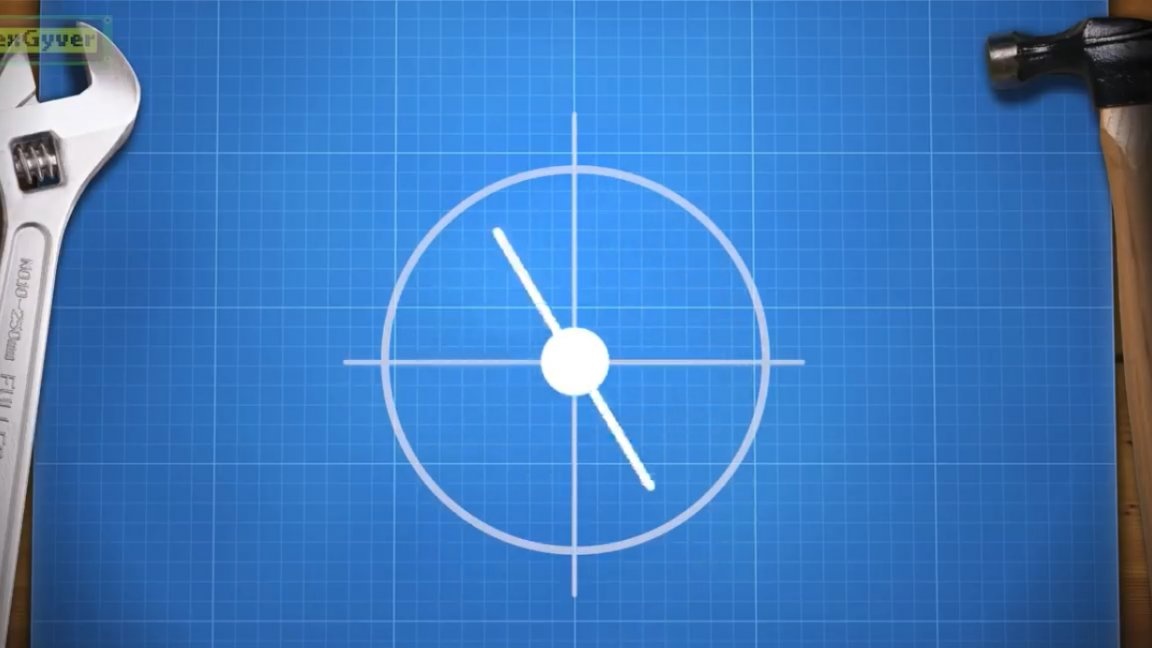
Vì vậy, chúng ta có hai góc, chúng ta biểu thị chúng bằng X và Y.

Y là góc nhỏ của mắt và X là góc xoay của mắt 180 độ.
Để đạt được tất cả các vị trí có thể, cần phải kiểm soát cả hai góc độ, và có một tính đặc hiệu. Hãy bắt đầu với chuyển động tròn đơn giản nhất với bán kính tối đa.
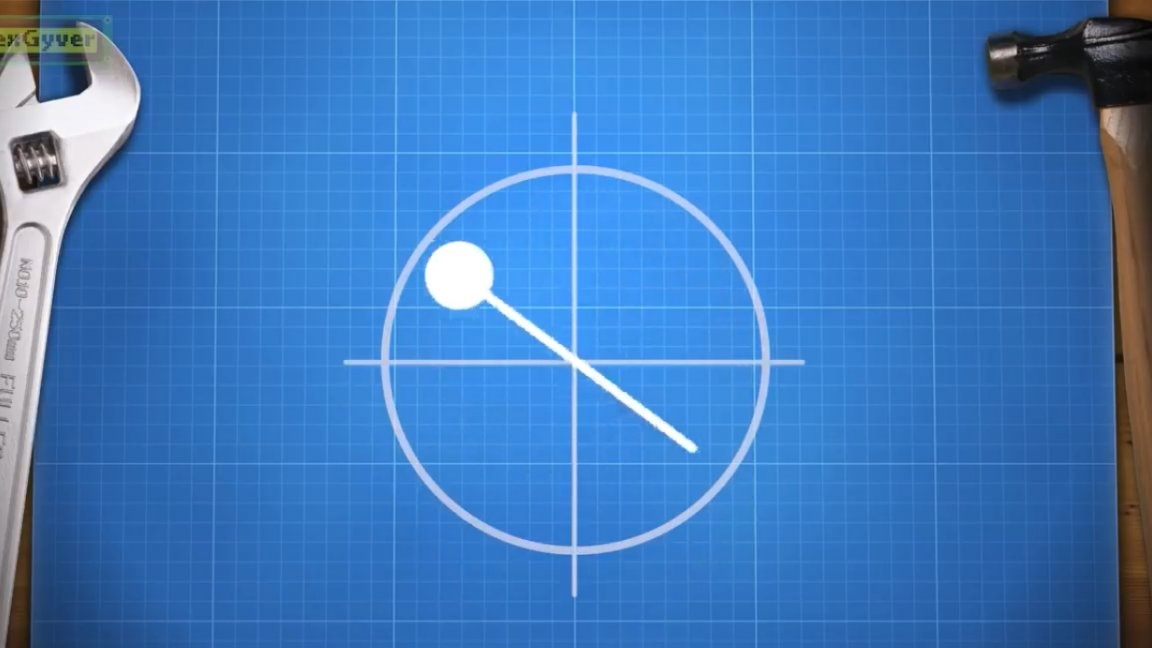
Nhưng nó không đơn giản như nó có vẻ. Do đó, điều đầu tiên mà tác giả đã làm là một hệ tọa độ cực, trong đó bạn có thể đặt góc xoay của mắt và bán kính, nghĩa là loại bỏ con ngươi khỏi điểm trung tâm 00.
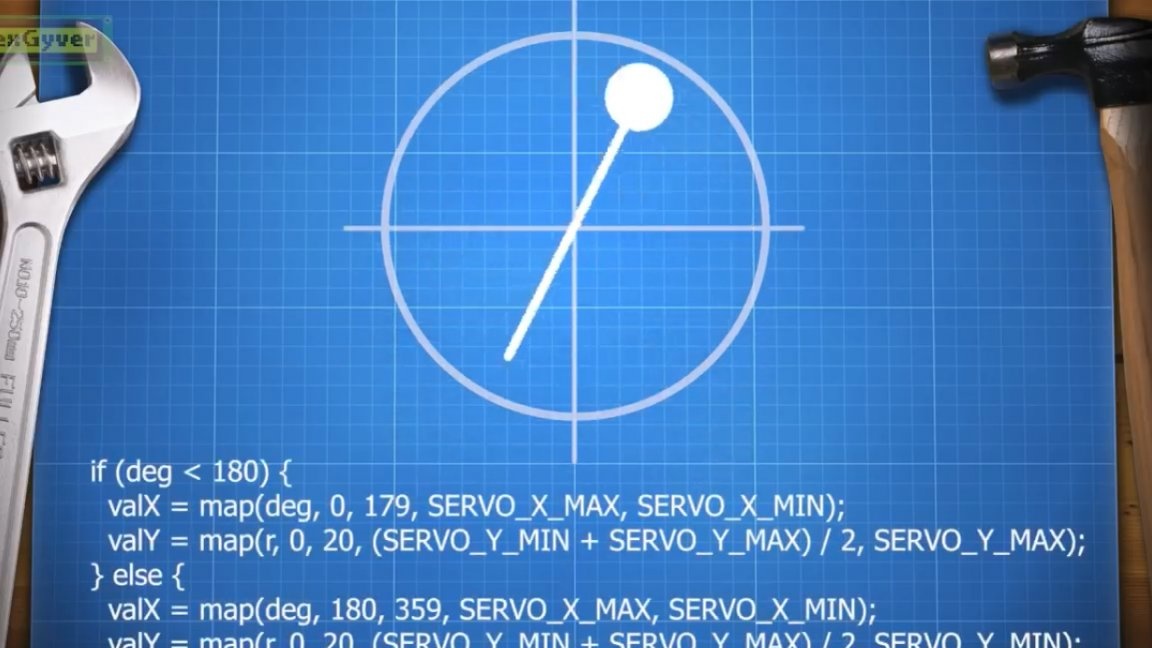

Trong hình bán nguyệt trên, chúng tôi làm việc từ một nửa góc Y đến giá trị tối đa của nó và ở dưới - từ tối thiểu đến một nửa. Bây giờ chuyển động mắt có thể được lập trình theo một cách thú vị hơn. Các chuyển động là ngẫu nhiên, nhưng đã xung quanh chu vi.


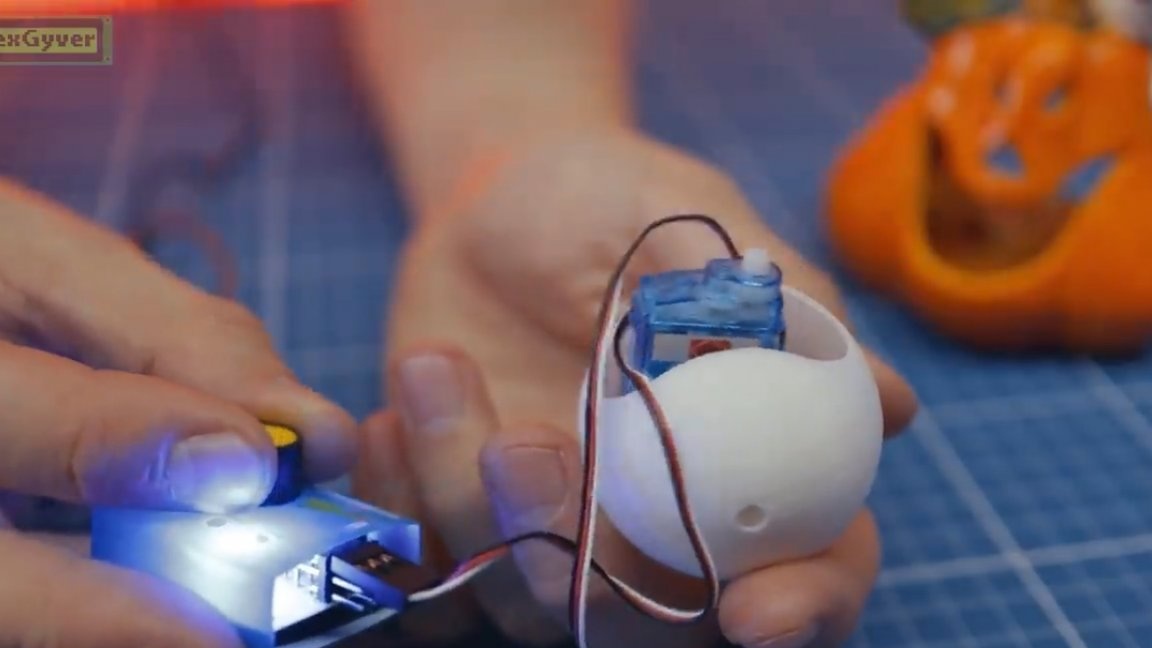
Bây giờ hãy hàn tất cả các thiết bị điện tử, mọi thứ như trong sơ đồ:
Đang cố gắng để bật nó lên.
Chỉ định là. Bây giờ chúng tôi đang che giấu toàn bộ điều này trong một số loại tòa nhà (trong trường hợp này, tác giả đã sử dụng một hộp đánh dấu).

Tất cả các mắt ảo của chúng tôi đã sẵn sàng. Đây là một trò đùa như vậy.


Nhưng chúng ta hãy tiếp tục nghiên cứu lý thuyết và dịch hệ tọa độ cực sang tiếng Cartesian, sau này tôi sẽ hiểu tại sao.

Mọi thứ đều đơn giản ở đây, hàm atan2 sẽ giúp chúng ta, trả về góc theo radian từ CEP đến P, và hàm hypot, sẽ tính độ dài của cạnh huyền trong cùng hai tọa độ và cạnh huyền là bán kính cho hàm trước của chúng ta.

Và theo cách đơn giản như vậy, đối tượng thử nghiệm của chúng ta giờ đây có thể đảo mắt chính xác nơi chúng ta cần (lên, xuống, phải, trái).

Vậy tại sao điều này lại cần thiết? Điều này là cần thiết để có thể thêm con quay hồi chuyểnvới sự giúp đỡ mà mắt sẽ quay cùng hướng với đầu, có lẽ sẽ trông khá buồn cười. Trên thực tế, dự án đã được thêm vào con quay hồi chuyển mpu6050, đây là giao diện của nó trong sơ đồ:
Thay đổi mã, đảm bảo rằng các số đọc từ con quay hồi chuyển làm lệch mắt. Qua bộ lọc tự nhiên.

Vì vậy, cuối cùng chúng ta nhận được gì? Mắt hơi trễ sau khi quay đầu, từ đó tạo ra hiệu ứng mà nó rẽ phải và nhìn vào bạn. Kết quả là, đây là một dự án toán học nhỏ như vậy.

Chương trình cơ sở TẠI ĐÂY. Cảm ơn bạn đã quan tâm. Hẹn gặp lại
Video của tác giả: