

Bạn muốn có một cuộc chiến giữa các robot nhện? Sau đó nghiên cứu kỹ bài viết này, trong đó, Master sẽ cho bạn biết cách tạo ra một con nhện như vậy. Và để rõ ràng về công việc của mình, hãy xem video.
Dụng cụ và vật liệu:
Cho con nhện
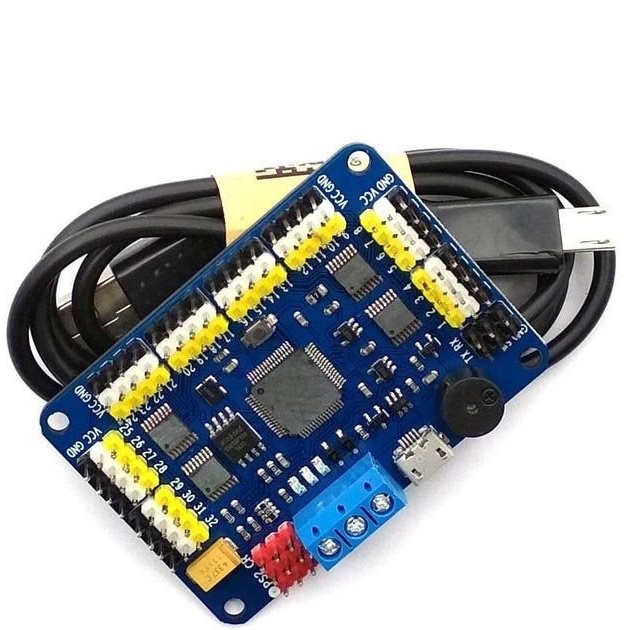
Bộ điều khiển servo 32 kênh;
-Wemos D1 Bộ điều khiển mini;
- Ổ đĩa Servo MG90S - 18 chiếc;
Bộ điều khiển -Ubec 6A 5V;
- Bộ chuyển đổi buck DC-DC;
- Nhảy cầu;
-Biết;
Đối với tháp
-Two động cơ;
Mô-đun điện;
- Bộ chuyển đổi hạ thấp;
Servo;
-Máy in 3D;
Súng -Gue;
-Gue;
- tuốc nơ vít;
-Fastener;
- Băng keo hai mặt;
-Chủ vụ;
-Knife;
-Nadfiles;
-Những quả bóng dẻo dai;
Phụ kiện -Soldering;






Bước một: In các bộ phận
Đầu tiên bạn cần in chi tiết thân và chân trên máy in 3D. Bạn có thể tải tập tin để in trên này liên kết.


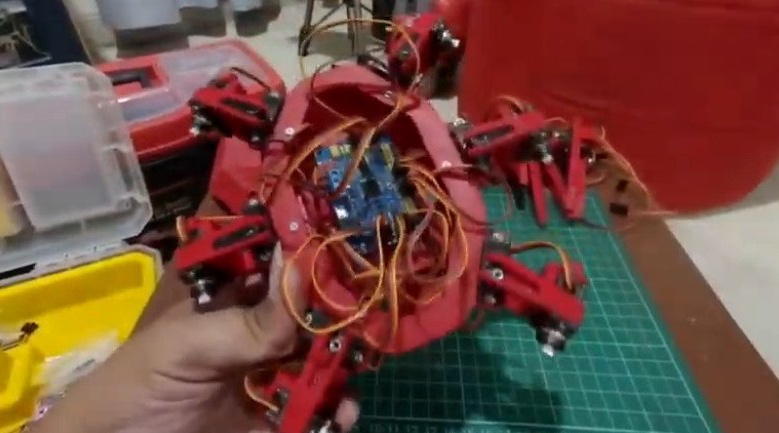
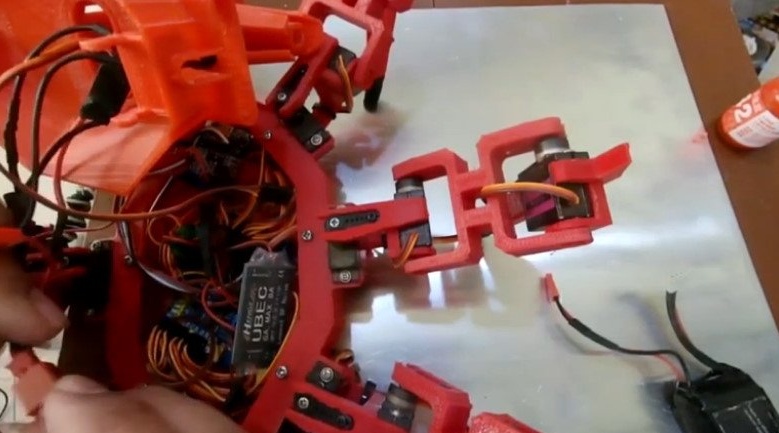
Bước hai: Xây dựng
Bây giờ bạn cần thu thập robopauk.
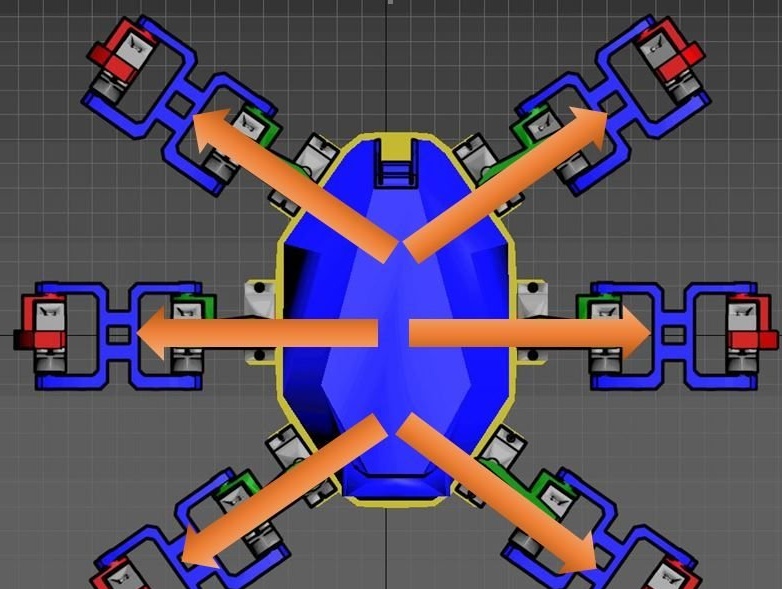
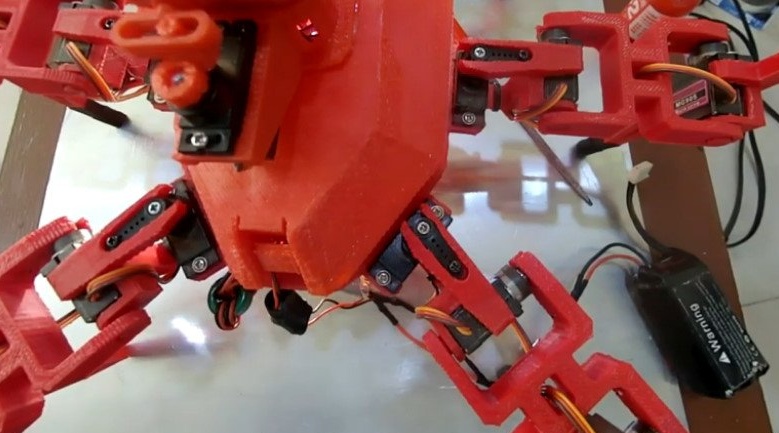
Bậc thầy cài đặt servo trên các khớp của chân nhện. Tổng cộng, robot có sáu chân và ba động cơ trên mỗi chân.








Cài đặt servo trên nền tảng khung gầm.




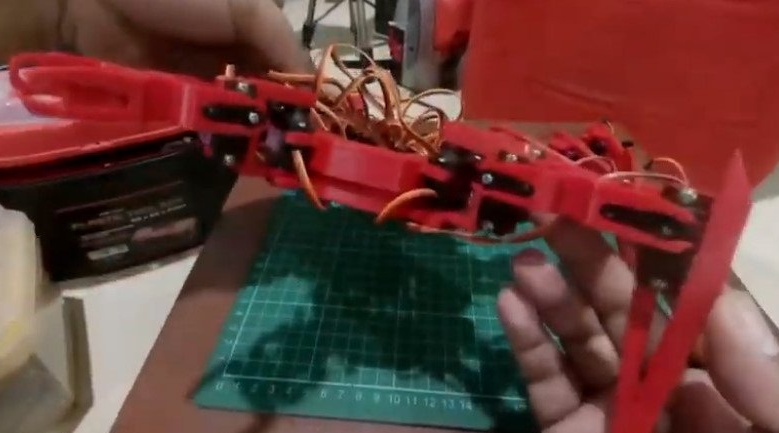
Vặn chặt các khớp đầu tiên của chân vào bệ đỡ.




Các dây được kéo vào các lỗ công nghệ và kết nối với bộ điều khiển.





Cài đặt sơ khai.


Thiết lập các khớp thứ hai của chân. Kết nối dây từ servo đến bộ điều khiển.






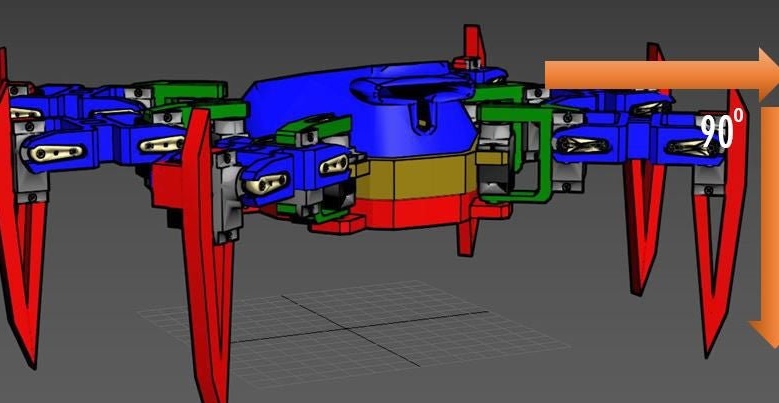
Cài đặt khớp thứ ba. Với khớp này, con nhện sẽ tiếp giáp với bề mặt khi di chuyển.



Kết nối và kiểm tra hoạt động của từng ổ servo.



Nếu mọi thứ thường cố định dây bằng dây buộc, hãy lắp pin và đóng nắp lại.



Quá trình xây dựng có thể được nhìn thấy trong video.
Bước ba: Giới thiệu điện tử
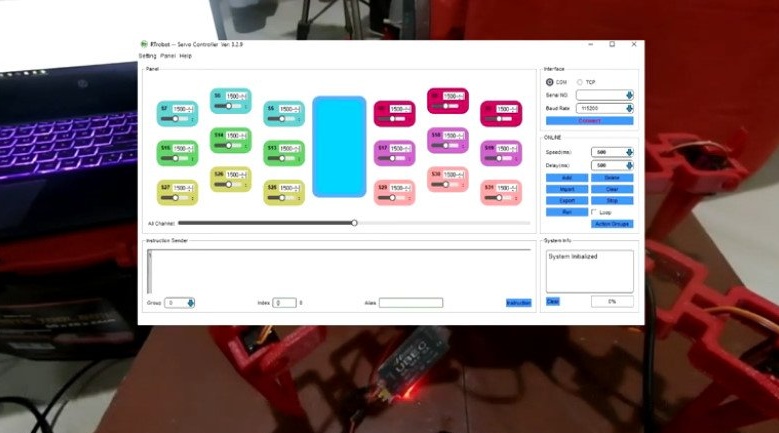
Trình hướng dẫn đã sử dụng bộ điều khiển servo RTrobot để điều khiển các chuyển động. Chương trình quản lý có thể được tải xuống ở đây hoặc ở đây.
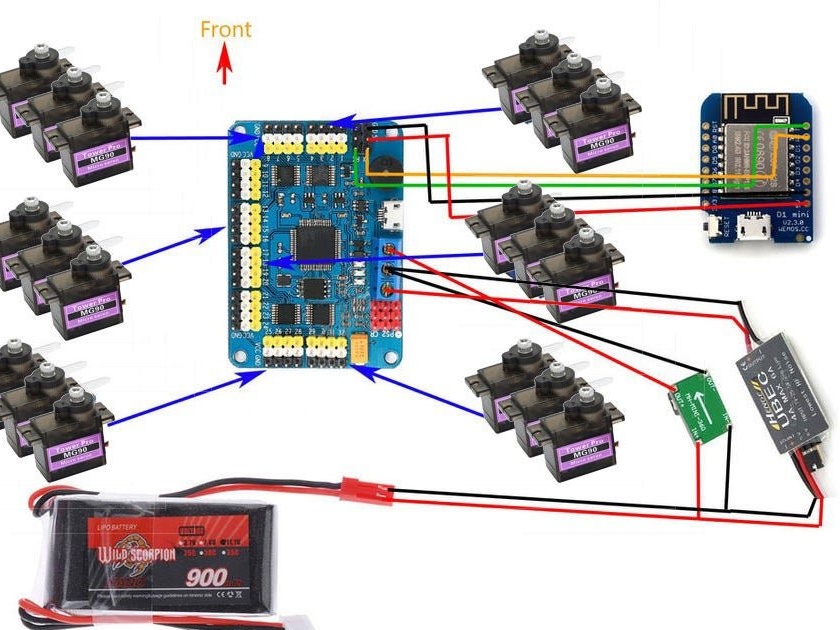
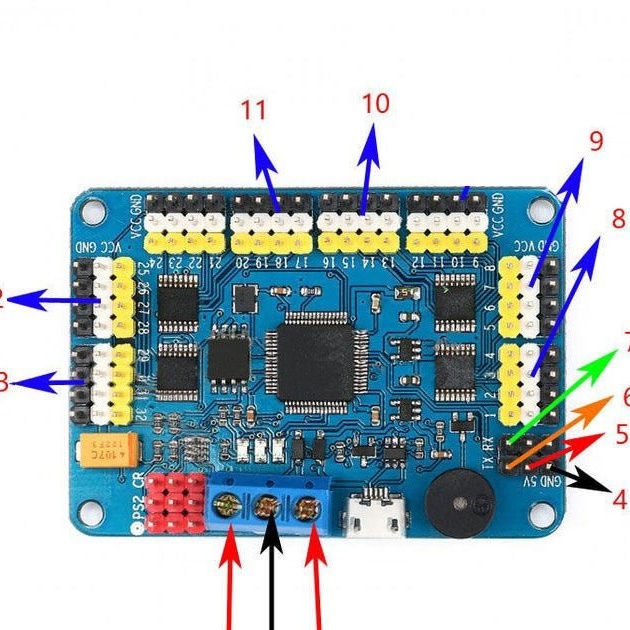
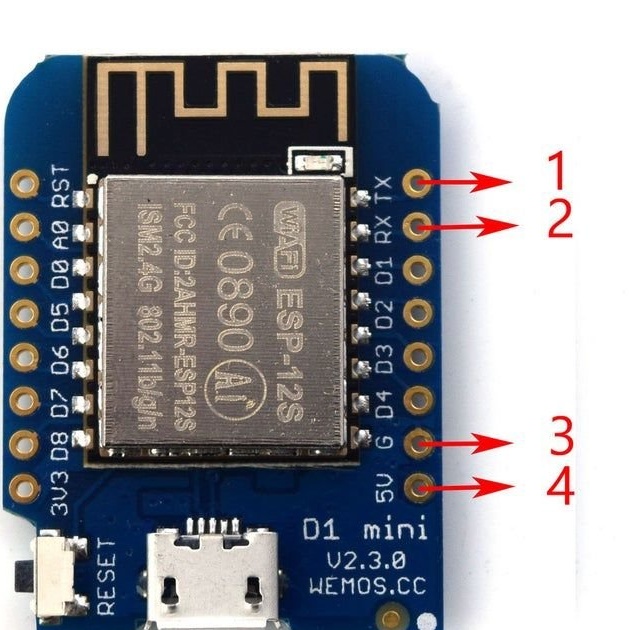
Mọi thứ được kết nối như sau:
1. Đầu ra UBEC 5V (+)
2. Trái đất từ UBEC và bộ chuyển đổi buck
3. Nguồn 5 V (+) từ bộ chuyển đổi
4. trên pin Wemos D1 mini G
5. đến Wemos 5v
6. đến Wemos D1 RX
7. Wemos TX
Ổ đĩa servo được kết nối với chân 8 đến 13.
Cài đặt mã trên NodeMCU. Bạn có thể tải nó ở đây.
WeMos D1 mini là thẻ Wi-Fi tối thiểu ESP8266.
Sử dụng wemos D1 mini làm điểm truy cập WIFI, bạn có thể gửi lệnh nối tiếp đến bộ điều khiển servo. Tất cả những gì cần thiết chỉ là để flash bảng nodeMCU bằng mã và bạn có thể kết nối điện thoại thông minh với nodeMCU AP. Sau đó, bằng cách sử dụng trình duyệt web, hãy truy cập http://192.168.4.1.
Nó quan trọng
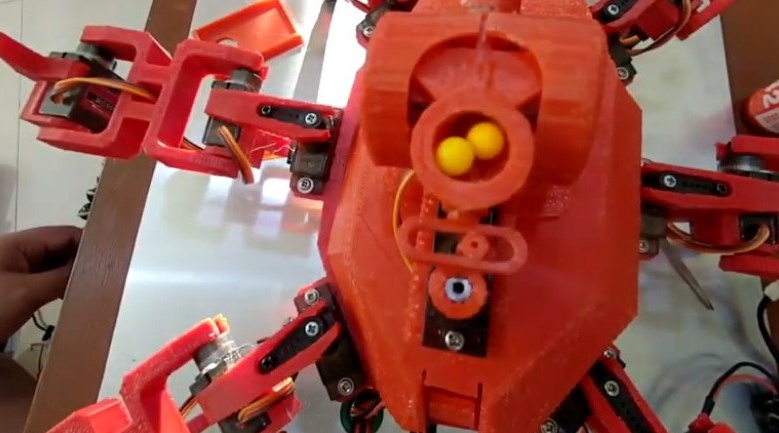
Khi bạn bật servo, tất cả các servo sẽ di chuyển đến vị trí ban đầu / tiêu chuẩn
cài đặt các servo càng chính xác càng tốt, như thể hiện trong hình trên hoặc trong video
điều chỉnh vị trí của các khớp, tắt và bật lại thiết bị để đảm bảo rằng tất cả các chân đều ở đúng vị trí
nếu các khớp bám, chà, điều chỉnh vị trí.
Bước bốn: Tháp
Bây giờ chúng ta chuyển sang lắp ráp tháp.
Đầu tiên, các chi tiết của tháp cần được in. Bạn có thể tải tập tin về cái này liên kết.
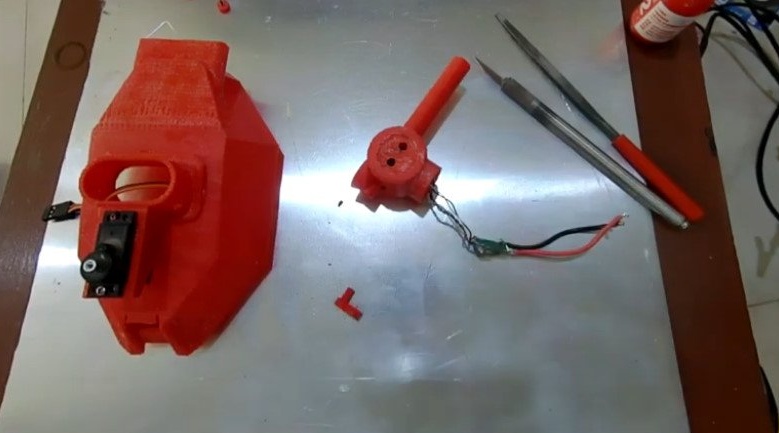
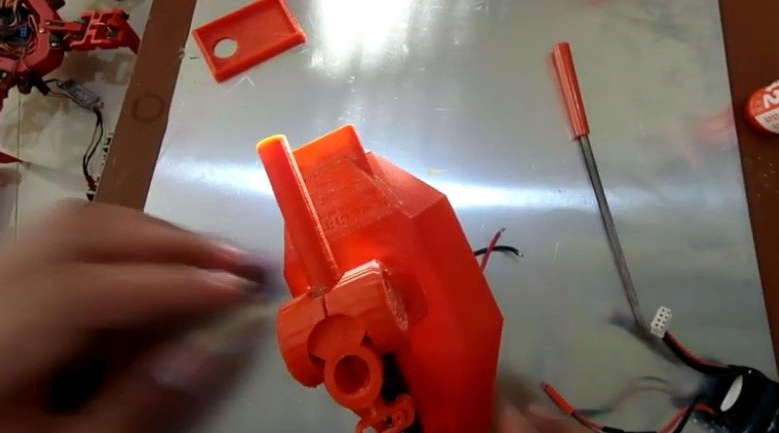
Sau đó, chủ tiến hành lắp ráp tháp. Mạch để xoay tháp và kết nối các bộ phận điện bên dưới.
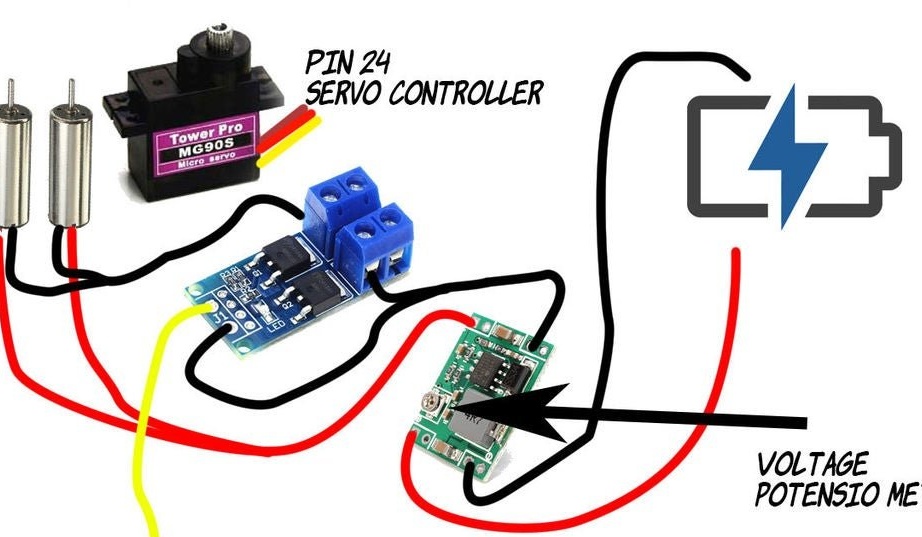
Cài đặt một servo trên tháp.







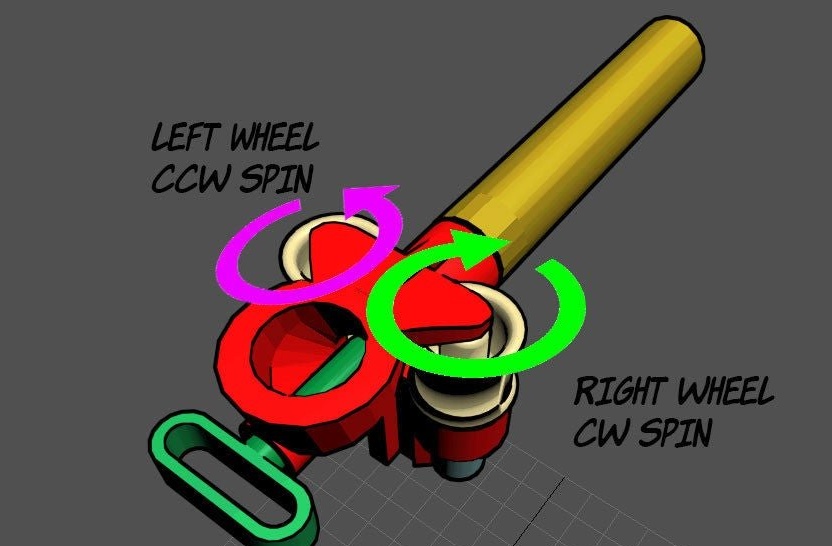
Băng dính hai mặt vào các con lăn.


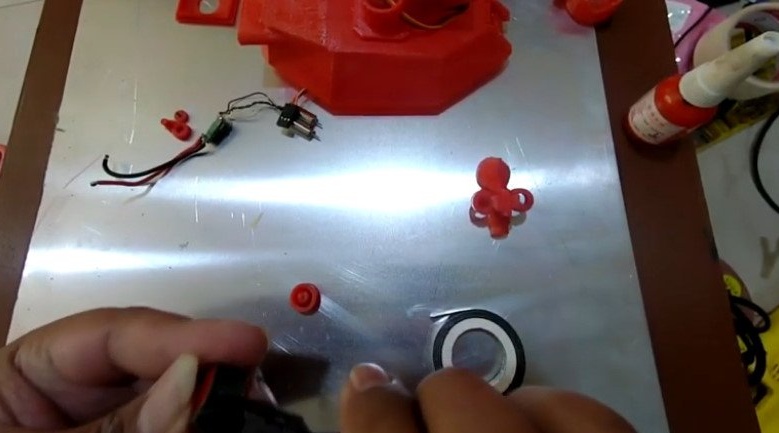
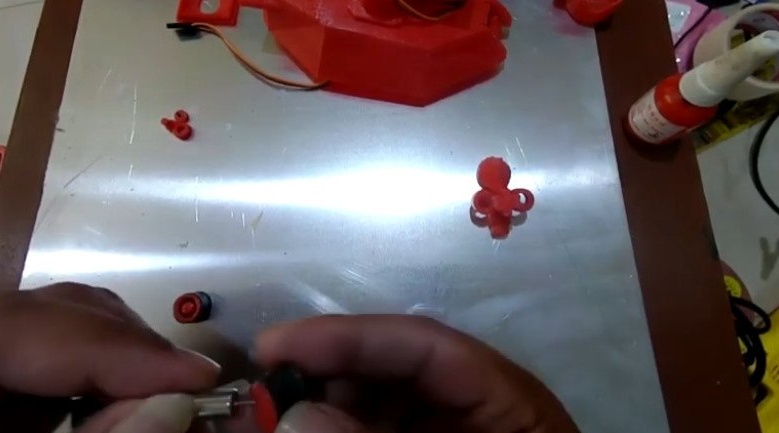
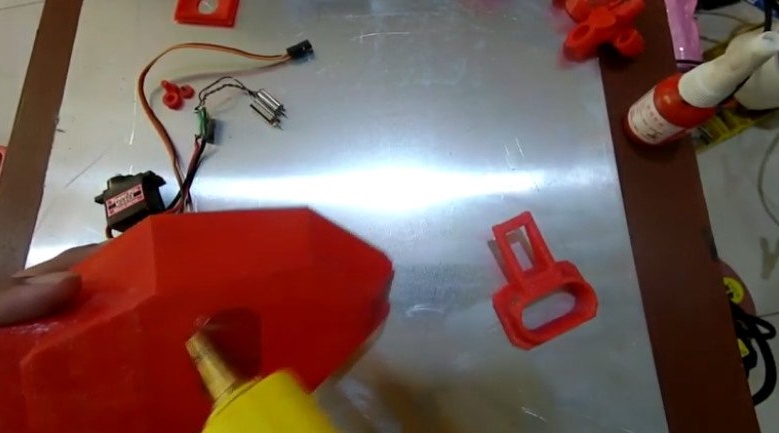
Thu thập một khẩu súng. Cài đặt động cơ trong một chủ sở hữu. Lắp đặt con lăn trên trục động cơ.







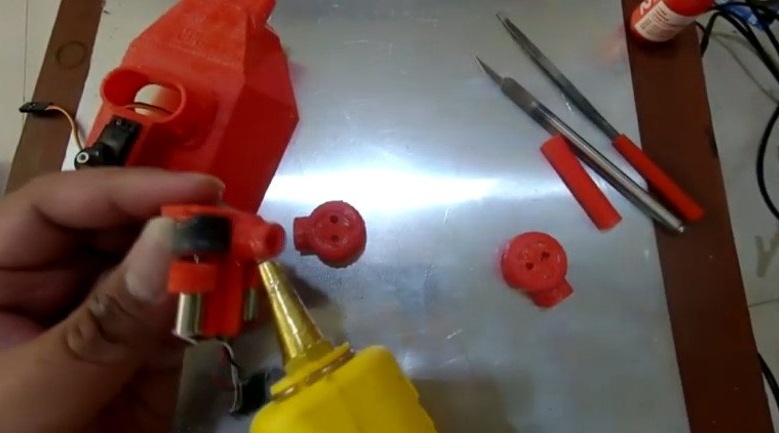
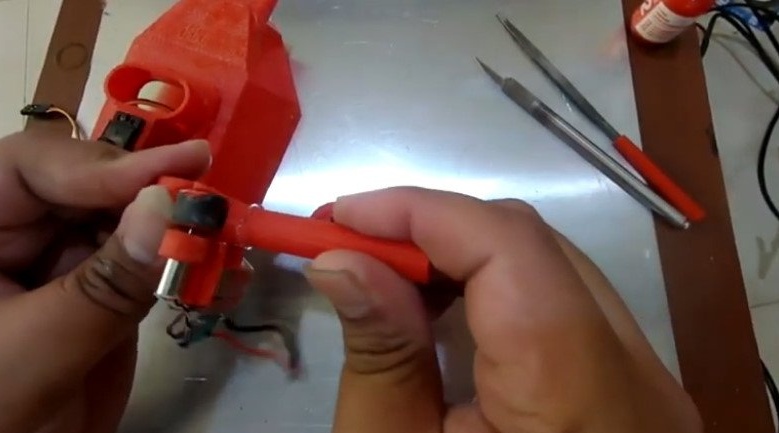

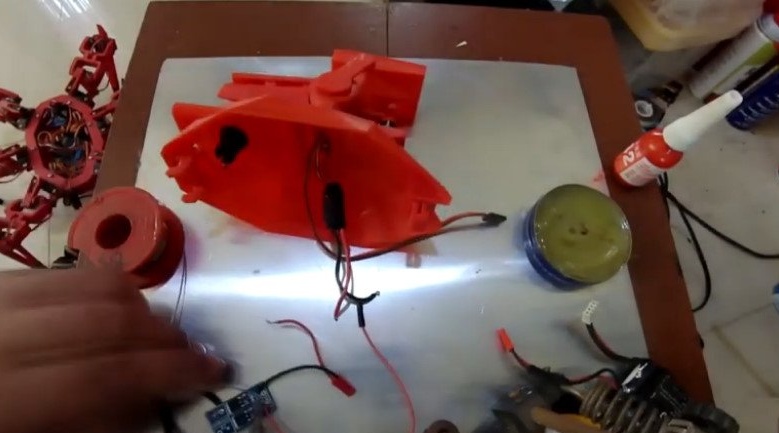
Kết nối dây và thu thập các tháp.




Nạp đạn và kiểm tra hoạt động của súng. Cơ chế có thể được điều chỉnh bằng cách di chuyển giá đỡ trên trục servo.


Nó làm cho kết nối cuối cùng, lắp ráp và kiểm tra.




Video với sự lắp ráp của tháp có thể được nhìn thấy dưới đây.
Mọi thứ đã sẵn sàng. Tập hợp thêm một robopauk như vậy và bạn có thể sắp xếp các trận đánh.
