
Vật liệu và dụng cụ:
- Arduino vi điều khiển (trong này tự làm áp dụng Arduino Uno Rev 3);
- Hai servo từ Parallax;
- cần điều khiển (cũng từ Parallax);
- bảng mạch) nhỏ);
- kết nối để kết nối;
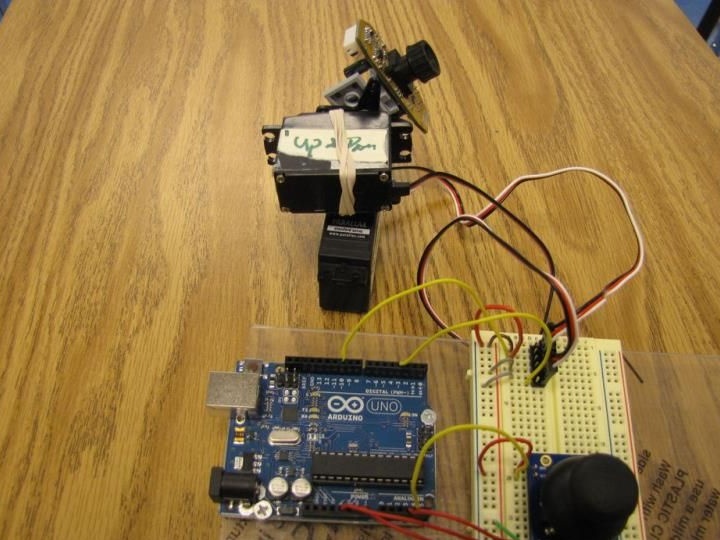
- Một thiết bị để theo dõi chuyển động của động cơ servo (sử dụng webcam và khối lego bị hỏng).
Quy trình lắp ráp tự chế:
Bước đầu tiên. Chúng tôi kết nối động cơ servo
Quá trình lắp ráp tự chế bắt đầu với việc kết nối các động cơ servo. Để lắp ráp một bố cục sơ bộ, một bảng mạch được sử dụng. Sau đó, nó sẽ có thể làm cho một lá chắn riêng biệt. Trong hình bạn có thể thấy chính xác mọi thứ được kết nối như thế nào.
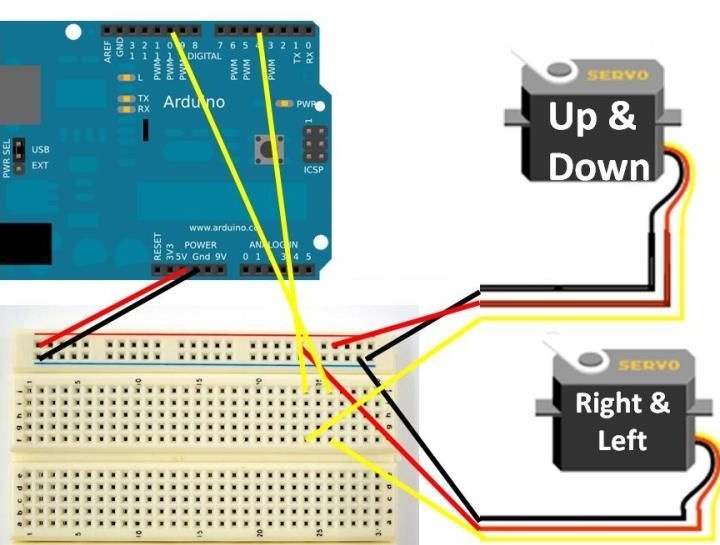
Cáp màu đỏ là nguồn điện, nó kết nối với chân 5V trên bộ điều khiển Arduino.
Dây màu đen là một điểm trừ (mặt đất), nó kết nối với đầu ra Arduino được gọi là GND.
Cáp màu vàng từ động cơ servo phải và trái phải được kết nối với chân 11. Trên một số kiểu máy, nó có thể có màu trắng.
Cáp Up & Down màu vàng tương tự phải được kết nối với pin 4. Nó cũng có thể có màu trắng trên một số kiểu động cơ.
Điều quan trọng cần nhớ là các đầu nối tín hiệu được sử dụng để điều khiển động cơ đến từ các đầu ra PWM.
Bước hai Kết nối phím điều khiển
Làm thế nào các phím điều khiển được kết nối có thể được nhìn thấy trong hình. Lúc đầu, sơ đồ có vẻ khá phức tạp, nhưng thực tế không có gì phức tạp ở đây. Như với động cơ, một bảng dây được sử dụng ở đây.
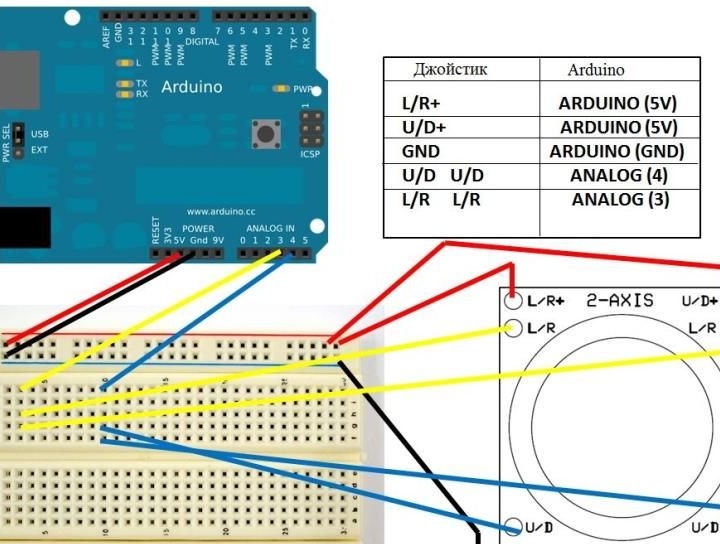
1. Trên mô-đun cần điều khiển, bạn có thể tìm thấy các đầu ra U / R + và L / R +. Thông qua các đầu ra này, năng lượng được kết nối. Theo đó, bạn cần áp dụng điện áp + 5V từ chân tương ứng cho Arduino.
2. Ngoài ra còn có hai đầu nối dưới phím điều khiển được gọi là L / R và hai đầu nối U / D. Chúng cần được kết nối với đầu ra tương tự A3 và A4.
3. Chà, kết luận lại, trái đất trên cần điều khiển phải được kết nối với trái đất trên Arduino.
Sau khi lắp ráp, kết nối phải được kiểm tra lại. Đó là do lỗi kết nối mà trong hầu hết các trường hợp phát sinh vấn đề. Điều này đặc biệt đúng khi một bảng mạch được sử dụng và có nhiều kết nối trên đó.
Bước baPhác thảo cho Arduino
Mã này rất đơn giản và chứa ý kiến chi tiết. Đoạn mã trên chỉ cần được sao chép vào Arduino IDE. Khi mã được tải, các động cơ không nên di chuyển. Họ chỉ nên bắt đầu di chuyển khi nhấn nút trên phím điều khiển.
Các vấn đề có thể phát sinh và làm thế nào để giải quyết chúng
1. Nếu động cơ không bật, hãy kiểm tra lại kết nối. Đầu ra PWM được sử dụng để kết nối động cơ và đầu ra analog được sử dụng để kết nối cần điều khiển.
2. Nó xảy ra rằng ngay sau khi tải mã, các động cơ bắt đầu rung. Điều này xảy ra nếu bạn kết nối không chính xác các chân U / D + L / R +. Kết nối cần phải được kiểm tra cẩn thận. Để không làm cháy bảng trong quá trình kiểm tra, nó phải được ngắt kết nối với máy tính.
3. Nếu mọi thứ được kiểm tra lại, nhưng các công cụ vẫn không muốn hoạt động, bạn có thể thử kết nối lại cần điều khiển. Nó phải được gỡ bỏ khỏi bảng mạch, và sau đó cài đặt trở lại với một số nỗ lực. Kết nối cần điều khiển nên đi vào bố trí.
Nếu mọi thứ bật ra, bây giờ bạn có thể bắt đầu tạo bất kỳ vật phẩm tự chế nào có điều khiển thông qua cần điều khiển. Ví dụ: bạn có thể tạo một robot có thể điều khiển bằng cần điều khiển và hơn thế nữa.