

Tác giả dựa trên dự án này trên một phiên bản đơn giản hơn. tự làm thuyền, và hoàn thiện nó. Các cảm biến được đặt trong thuyền để tránh chướng ngại vật và di chuyển vào ánh sáng. Bộ điều khiển trong thuyền được sử dụng như thế nào Arduino, một cảm biến siêu âm được lắp đặt ở phía trước và cảm biến ánh sáng được đặt ở hai bên. Chiếc thuyền đơn giản này không đâm vào tường và được điều khiển bằng đèn pin.
Vật liệu và dụng cụ:
- Băng cách điện / băng dính
- Thermoglue với keo nóng
- Động cơ DC 2 chiếc
- Chai nhựa 2 chiếc
- dây
- Cánh quạt nhỏ 2 chiếc
- Arduino, máy tính và cáp USB
- Hộp nhựa
- Pin và đầu nối 9V
- Điốt nguồn (loại 1N4004)
- Điện trở
- MOSFET bóng bán dẫn hoặc TIP 120
- Hai máy photocopy và hai nút
- kéo
- Hàn bằng sắt hàn

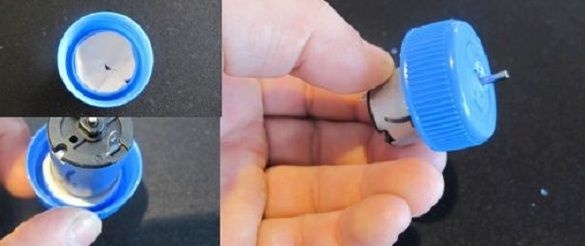
Bước 1. Cài đặt động cơ.
Nắp được lấy ra khỏi chai và một lỗ được tạo ra trong mỗi chai. Bên trong bìa, tác giả bóp keo nóng mà không đóng lỗ. Anh ta đặt trục động cơ vào lỗ và dán nó vào keo. Sau khi keo khô, trục quay tự do. Thủ tục tương tự xảy ra với bìa thứ hai.
Bước 2. Gắn các chai.
Các chai được gắn chặt với nhau theo nguyên tắc của một chiếc bè với sự trợ giúp của ba dải băng dính.

Bước 3. Hàn vào động cơ.
Do các động cơ được gắn trong phích cắm không có dây dẫn, nên cần phải hàn chúng, chiều dài của dây khoảng 25-30 cm.

Bước 4. Việc cắt trong chai.
Để dây điện rơi vào thân thuyền, một khe nhỏ được làm từ phía trên của chúng.

Bước 5. Bảo vệ động cơ.
Hơn nữa, tác giả vặn nắp trên các chai, vì chúng không xoắn tốt, tôi phải sử dụng keo nóng. Dây được đẩy qua các lỗ đã chuẩn bị trên chai.

Bước 6. Trường hợp.
Một hộp nhựa dính vào hai chai. Trong điện dung này cho thiết bị điện tử, bạn có thể tạo lỗ cho dây hoặc giữ dây qua mặt sau của hộp. Các lỗ cho dây trên chai được cách nhiệt bằng keo nóng chảy.

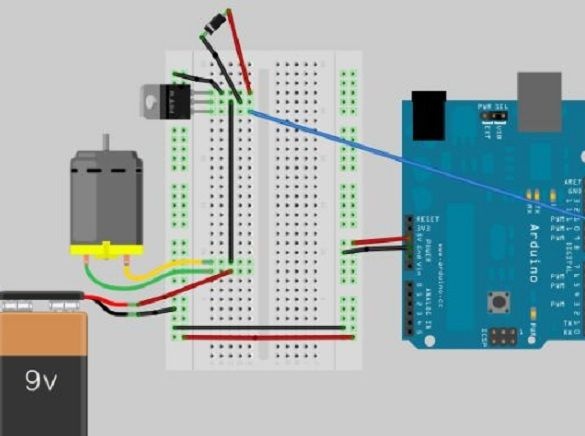
Bước 7. Sơ đồ nối dây.
Mạch sử dụng bóng bán dẫn TIP 120 làm công tắc (bạn có thể sử dụng các bóng bán dẫn MOSFET hoặc Darlington tương tự). Nó được sử dụng để chuyển đổi tải khi tiêu thụ một lượng lớn dòng điện, vì Arduino không có đủ năng lượng cho động cơ. Mạch này được lắp ráp cho động cơ thứ nhất và sau đó cho động cơ thứ hai (không cần pin khác cho động cơ thứ hai).
Bước 8. Cảm biến.
Cảm biến siêu âm là tuyệt vời cho phía trước của thuyền, cảnh báo các chướng ngại vật trên đường đi. Photocell hoạt động giống như ăng-ten và được sử dụng để làm cho chiếc thuyền trôi vào ánh sáng.Các nút ở hai bên được sử dụng làm cảm biến chướng ngại vật. Bạn cũng có thể sửa đổi mã và sử dụng các cảm biến khác, chẳng hạn như hồng ngoại.

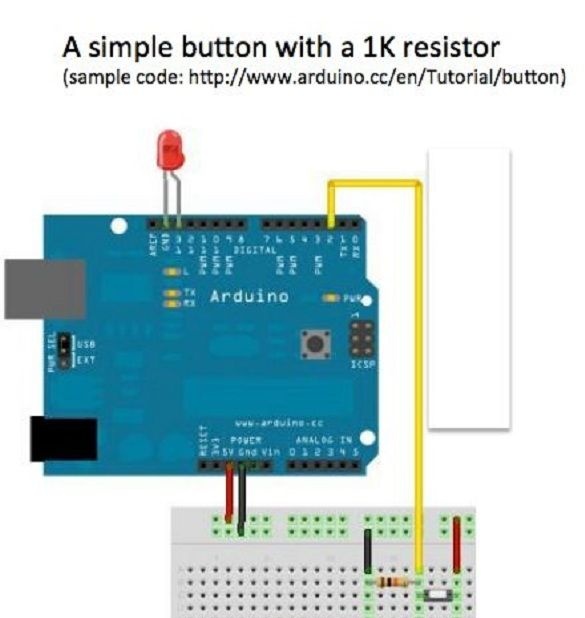
Bước 9. Sơ đồ cho các cảm biến.
Sơ đồ cho thấy kết nối của một nút đơn giản và điện trở 1K. Sơ đồ cho cả hai nút được lặp lại, các nút được đặt ở hai bên thuyền. Họ sẽ chịu trách nhiệm thay đổi chuyển động của thuyền trong một vụ va chạm.
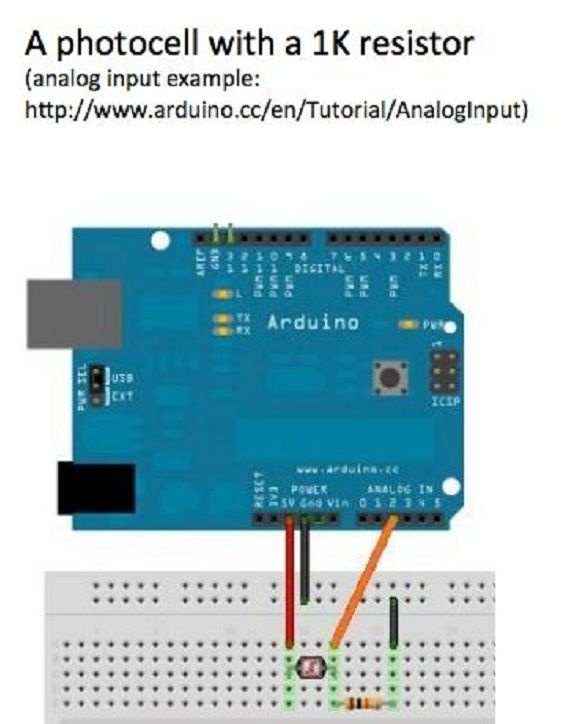
Hình dưới đây cho thấy một mạch có điện trở 1K và tế bào quang điện. Tác giả đã thực hiện nó 2 lần và đặt các máy photocopy ở hai bên đối diện của thuyền.
Bước 10. Mã chương trình.
Tác giả đã cung cấp cơ hội để tải xuống mã của nó để sử dụng, do đó cung cấp chức năng cơ bản cho những người sẽ lắp ráp một chiếc thuyền như vậy. Mã này bao gồm hỗ trợ cho máy photocopy, rangefinder và các nút. Thuyền sẽ cố gắng tránh chướng ngại vật phía trước và quay theo hướng ngược lại khi gặp chướng ngại vật từ phía bên. Nếu không có mong muốn sử dụng toàn bộ bộ cảm biến, nhưng chỉ một số trong số chúng có mã riêng cho từng bộ. Bạn có thể tải xuống tất cả các mã theo bài viết.
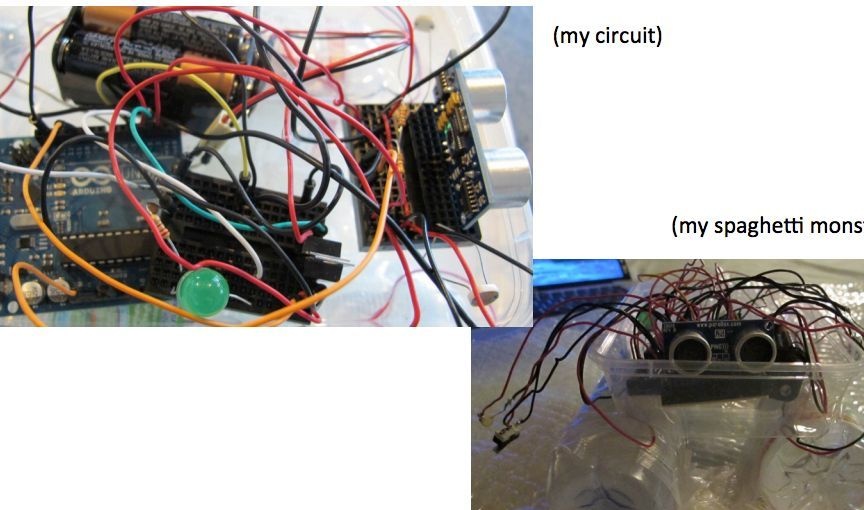
Bước 11. Lắp ráp thuyền.
Mạch lắp ráp, Arduino và pin được đóng hộp.
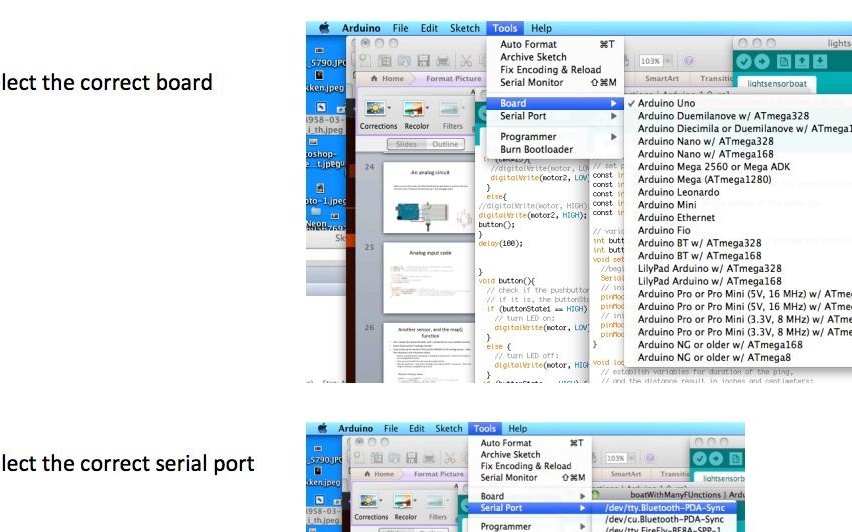
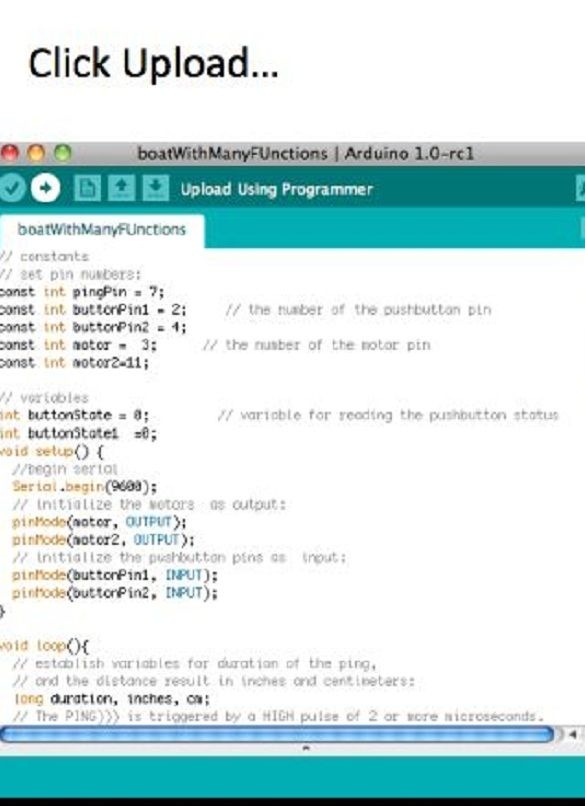
Bước 12. Tải về bản phác thảo.
Tiếp theo, Arduino IDE mở ra, chọn đúng tệp và cổng, sau đó tác giả đã biên dịch và tải mã lên bộ điều khiển.
Bước 13. Chống nước và thử nghiệm.
Tác giả cũng cách ly tất cả các vị trí tiềm năng của nước xâm nhập bằng keo nóng. Cũng cách điện tất cả các dây từ ngắn mạch. Các thùng chứa với Arduino được phủ cùng một hộp và niêm phong bằng băng keo điện. Cánh quạt được gắn vào động cơ. Ở đây thuyền đã sẵn sàng, bây giờ bạn có thể bắt đầu thử nghiệm trên mặt nước.



Video với một thử nghiệm sơ bộ của chiếc thuyền: