


Vật liệu và dụng cụ để lắp ráp:
- Bộ điều khiển quay;
- intel Edison với Arduino Ban đột phá
- Trình điều khiển I2C PWM;
- đột phá đồng hồ thời gian thực;
- OLED I2C mini;
- hai servo;
- Ba động cơ có bánh răng kim loại;
- hai dây cho ổ servo dài 30 cm;
- ổ cắm để cắm;
- công tắc bật tắt hai vị trí;
- bàn chải và kem đánh răng;
- cấp nguồn cho 5V 3A;
- một ống tiêm nhựa;
- đai ốc và ốc vít;
- đai ốc và thanh ren;
- một miếng acrylic trong suốt có kích thước 61 cm x 61 cm x 3 mm;
- ván ép có kích thước 91 cm x 61 cm x 6 mm;
- Máy in 3D.
Quy trình lắp ráp robot:
Bước đầu tiên. Phần cơ
Thiết bị này được mô hình hóa đầu tiên bằng cách sử dụng kết hợp Fusion 360 và Illustrator. Trong quá trình này, toàn bộ công nghệ đã được tạo ra, bao gồm in 3D, cũng như cắt laser kim loại. Tổng cộng, hệ thống có thể được chia thành bốn nút chính. Điều này bao gồm một cỗ xe, một bàn chải đánh răng, một cơ thể chính và một bộ phân phối.
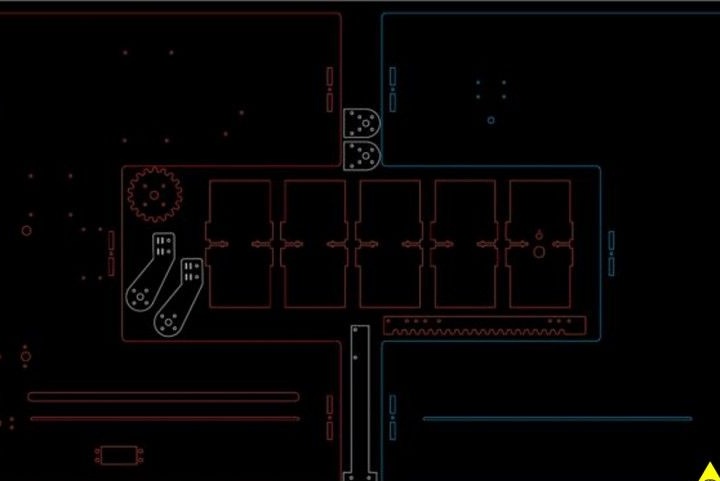
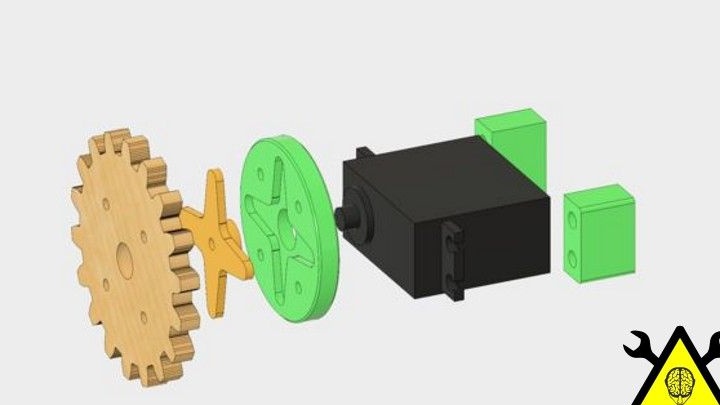
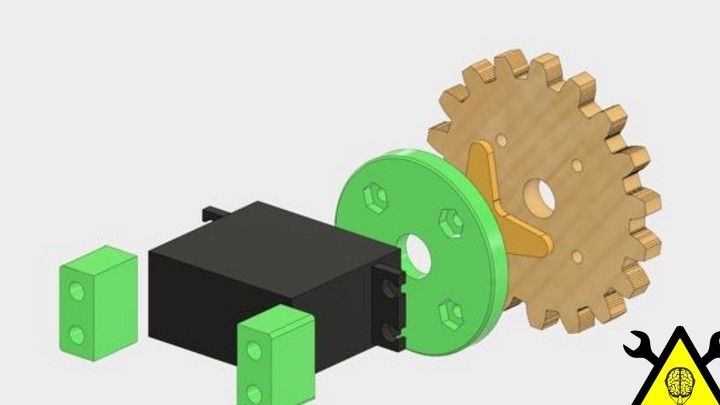
Để các sản phẩm sản xuất tại nhà được sử dụng cho các nhu cầu rộng hơn, người ta đã quyết định tạo mô hình bộ điều hợp cho các động cơ tiêu chuẩn và vi mô. Những bộ điều hợp này có các khe để gắn trục tiêu chuẩn, cũng như không gian cho bốn đai ốc ở mặt sau. Do thực tế là các bộ điều hợp được thiết kế cho trục, chúng phải được gắn vào các tấm hoặc với các vật thể khác.

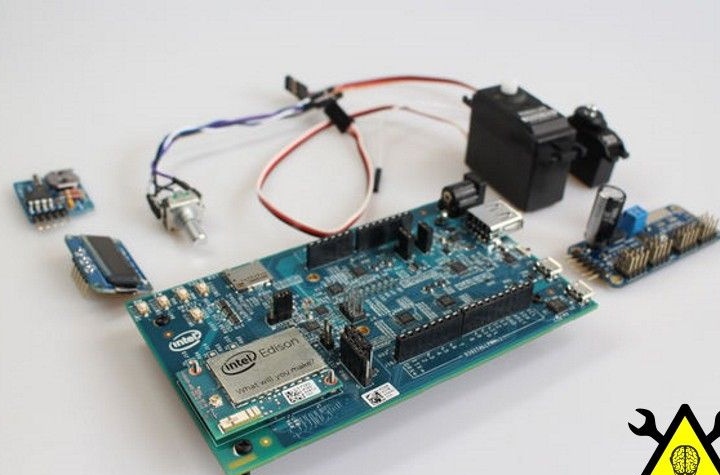
Bước hai Mạch điện của thiết bị
Một nguồn 5V và 3A được sử dụng làm nguồn điện. Điều này là đủ để cung cấp năng lượng cho một động cơ. Đối với bo mạch chính, nó tiêu thụ khoảng 500 mA, và các ổ đĩa động cơ, đèn LED gốc và đồng hồ thời gian thực tiêu thụ một lượng nhỏ dòng điện.
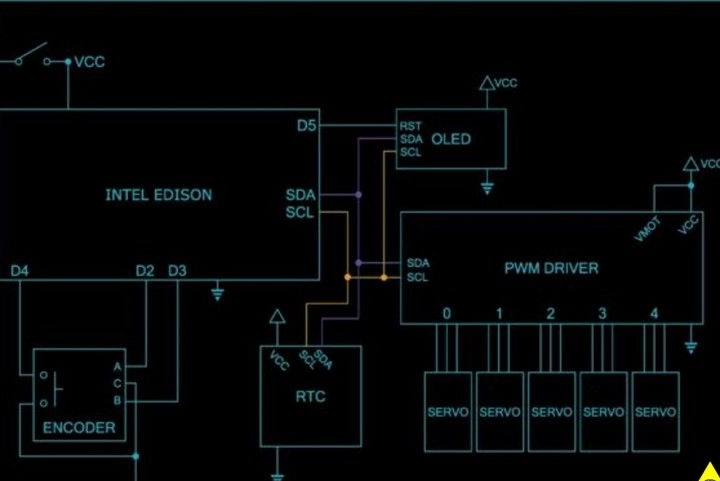
Bộ xử lý Intel Edison được sử dụng làm bộ điều khiển chính của hệ thống. Do sự tách biệt của các bo mạch, bộ xử lý có thể dễ dàng giao tiếp với các thành phần khác của thiết bị điện tử. Bảng kết nối với động cơ, đồng hồ và màn hình.
Để điều khiển năm động cơ, một bảng điều khiển PWM được sử dụng. Sức mạnh của các động cơ có thể được kiểm soát bằng cách sử dụng nguồn bên ngoài, nhưng tác giả đã quyết định buộc Vmot vào chân VCC.Nhờ vậy, toàn bộ hệ thống được cung cấp bởi 5V.
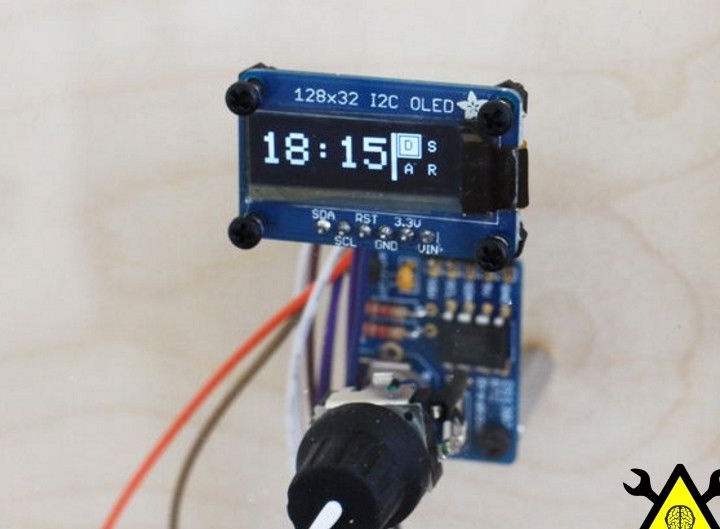
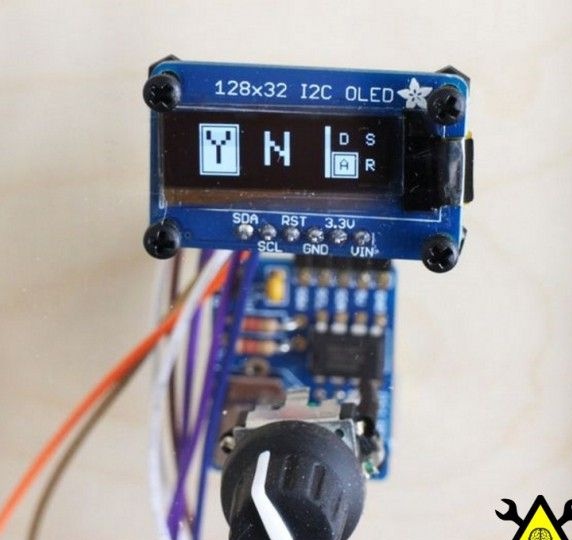
Để có thể điều khiển thiết bị, màn hình kích thước 128 x 32 nhỏ được sử dụng. Một cảm biến quay đóng vai trò là đầu vào chính của người dùng. Đầu ra của cảm biến được kết nối với các tiếp điểm kỹ thuật số của bộ xử lý.
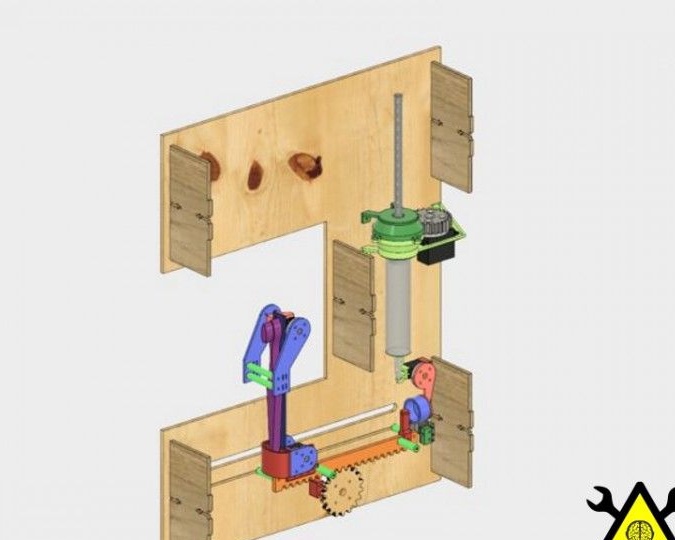
Bước ba Lắp ráp cơ thể
Phần sau đóng vai trò là giá đỡ cho vỏ máy, nó được làm bằng gỗ dán có độ dày 6 mm. Bốn ốc vít được sử dụng để bảo đảm cho bộ xử lý và bộ xử lý. Edison được gắn ở mặt trước và PWM ở mặt sau.
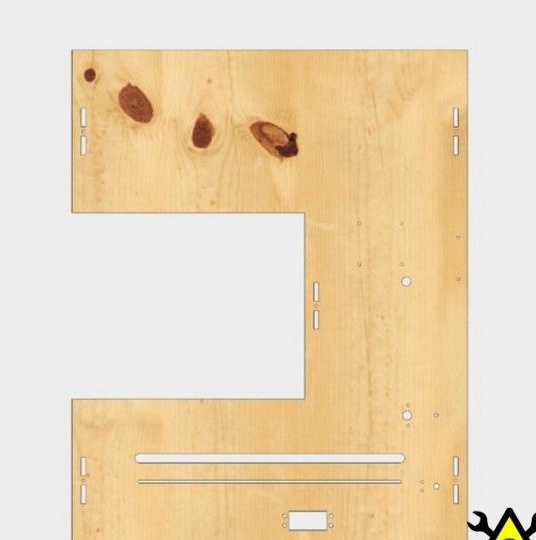
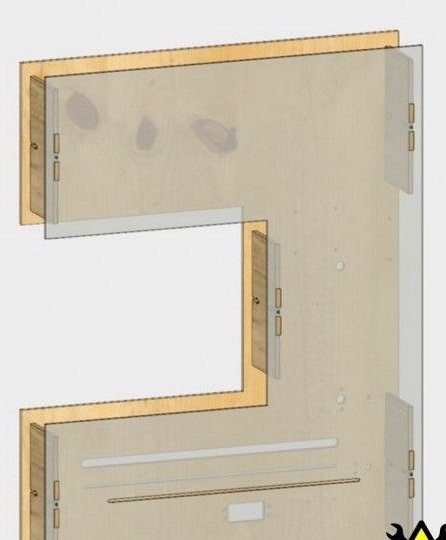
Năm tấm đệm được sử dụng để kết nối các tấm phía trước và phía sau. Miếng đệm được gắn vào các tấm bằng ốc vít và đai ốc thích hợp. Các tấm gần như đối xứng, nhưng các phần nhô ra ở một cạnh ngắn hơn, chúng không mở rộng về phía trước. Công tắc, cùng với đầu nối nguồn, được gắn vào thanh chống phía dưới.

Đối với bảng điều khiển phía trước, chủ yếu là cần thiết để bảo vệ thiết bị trong quá trình hoạt động. Bốn ốc vít được sử dụng để bảo vệ màn hình, cảm biến quay cũng được gắn với các đai ốc.
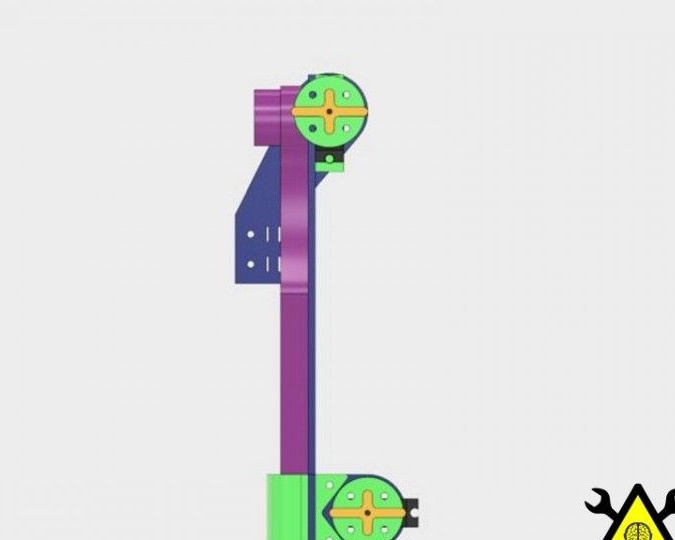
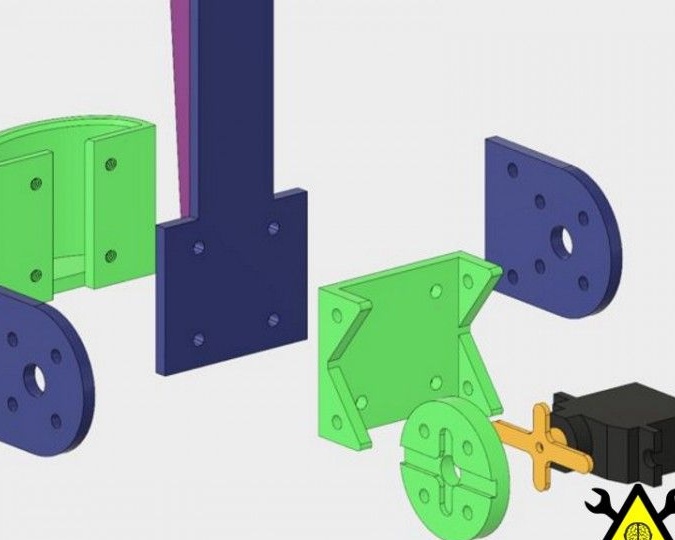
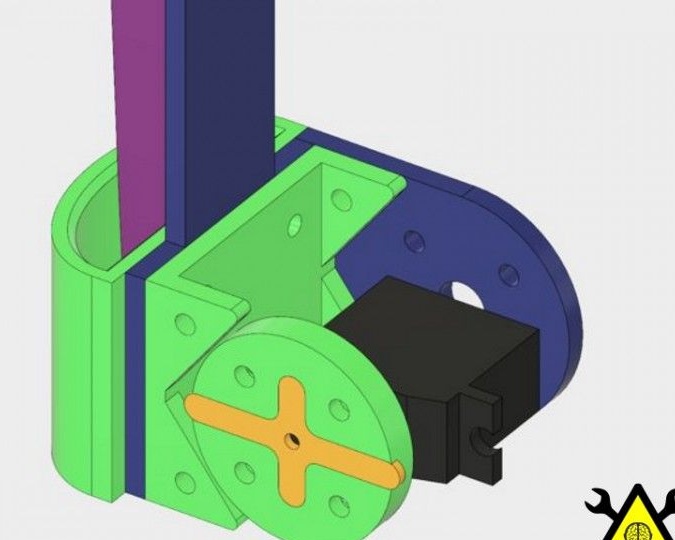
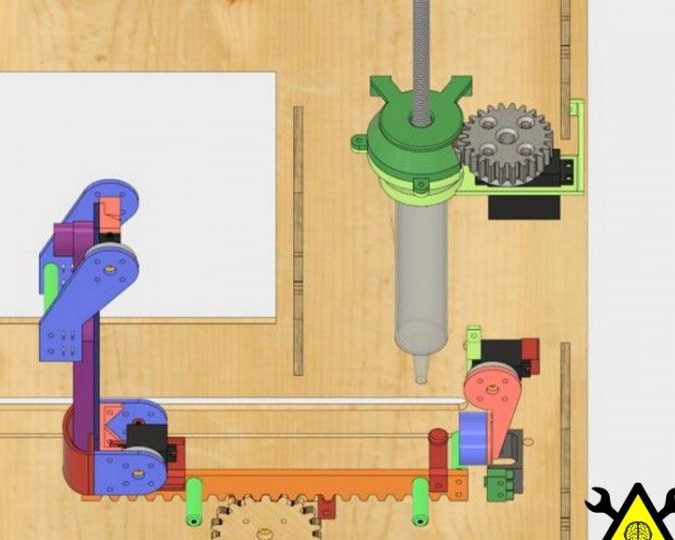
Bước bốn Bàn chải đánh răng
Có hai động cơ trên giá đỡ bàn chải đánh răng, được điều khiển bởi các bộ phận - chân đế và đầu bếp. Trong hình bạn có thể thấy các yếu tố của màu xanh và màu xanh lá cây. Những gì được cắt bằng máy cắt laser có màu xanh lam và các yếu tố được in trên máy in 3D có màu xanh lá cây.

Nhờ cái đầu, bàn chải đánh răng không rơi. Các tay được điều khiển bởi một ổ đĩa servo duy nhất, chúng được gắn chặt bằng hai miếng đệm. Một bộ chuyển đổi 3D và hai ốc vít được sử dụng để gắn động cơ servo vào tấm chính. Có bốn khe trong đĩa, thông qua chúng với sự trợ giúp của dây cao su màu đen, một bàn chải đánh răng được gắn vào.
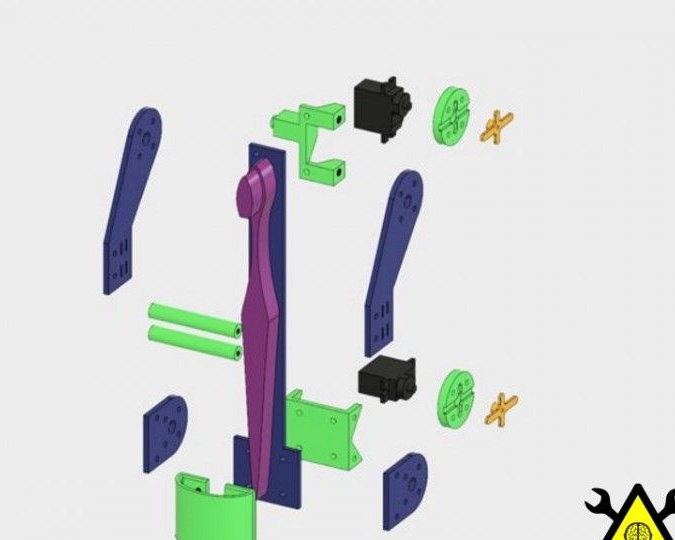
Đế là một cốc 3D nhỏ, nó giữ cho bàn chải không bị rơi. Sau khi bàn chải đánh răng được nạp vào cụm, ổ servo giữ nó và quay xuống. Tám ốc vít được sử dụng để kết nối các tấm.


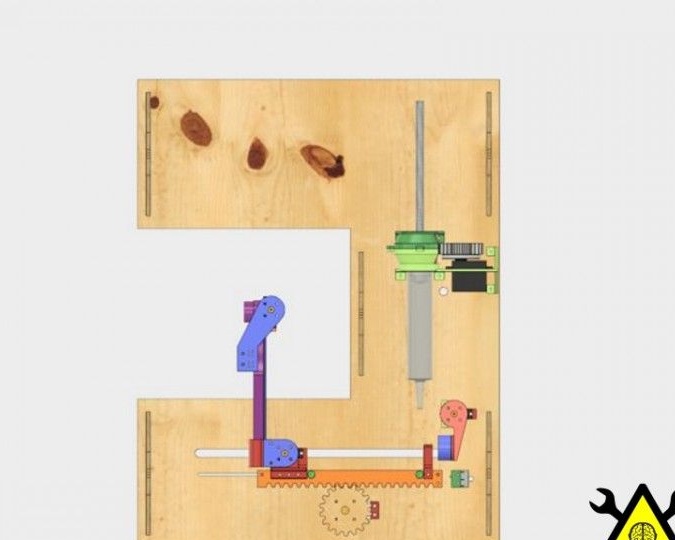
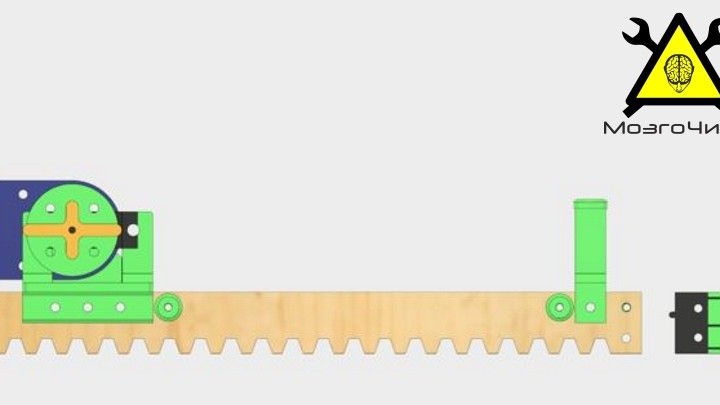
Bước năm Lắp đường ray
Khung bao gồm ba phần độc đáo, đây là một tựa đầu, xe ngựa và thanh chống. Sử dụng xe ngựa, khung giữ được gắn. Cỗ xe được gắn với ba ốc vít. Tựa đầu là cần thiết để giảm tải cho giá đỡ servo chính, nó được gắn thêm trên cỗ xe trên khung.
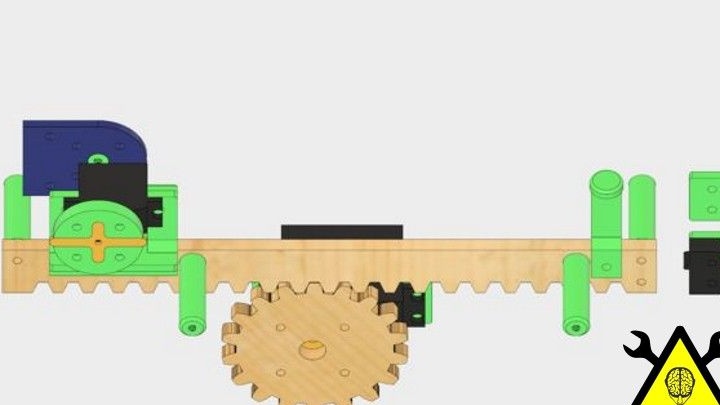
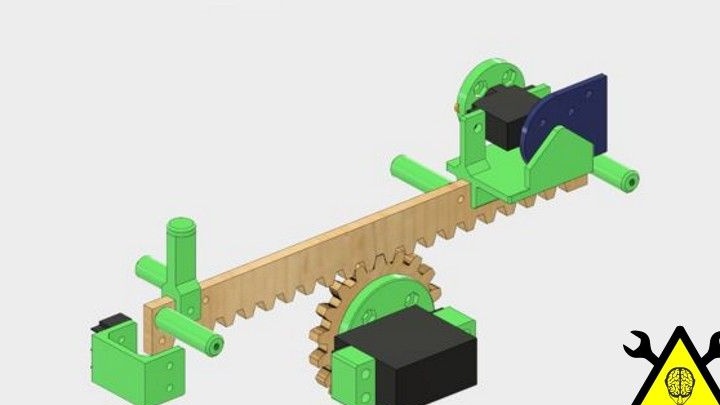
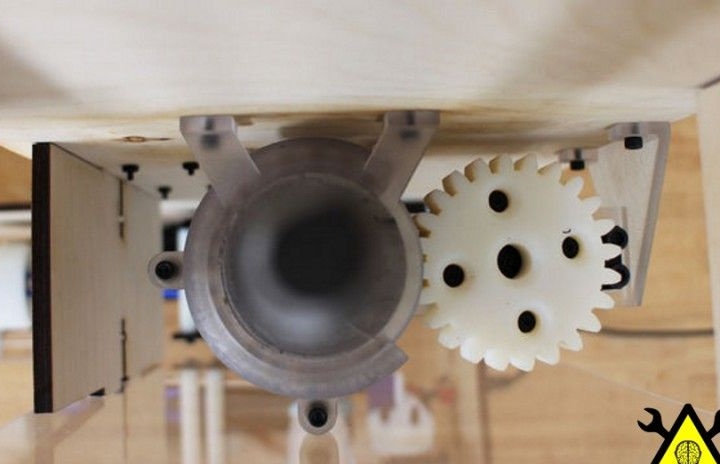
Các bánh răng được gắn dưới khung. Nó được cắt ra khỏi ván ép dày 6 mm và được gắn vào trục servo tiêu chuẩn. Bản thân ổ đĩa servo được đặt hơi lệch so với tấm đế, liên quan đến điều này có các thanh chống hình chữ nhật giống hệt nhau trên nó. Bản thân servo được gắn vào đế bằng bốn ốc vít.
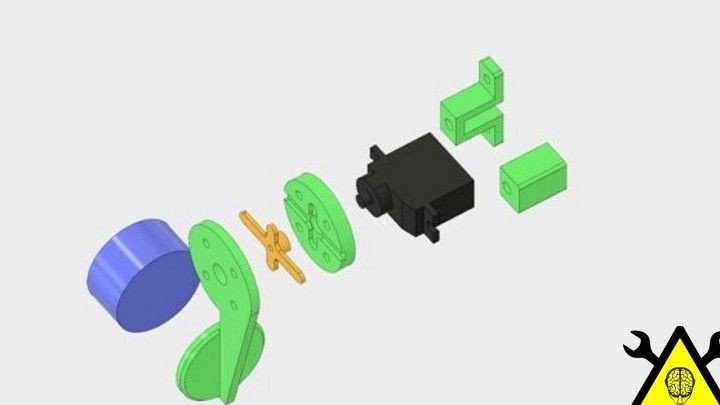
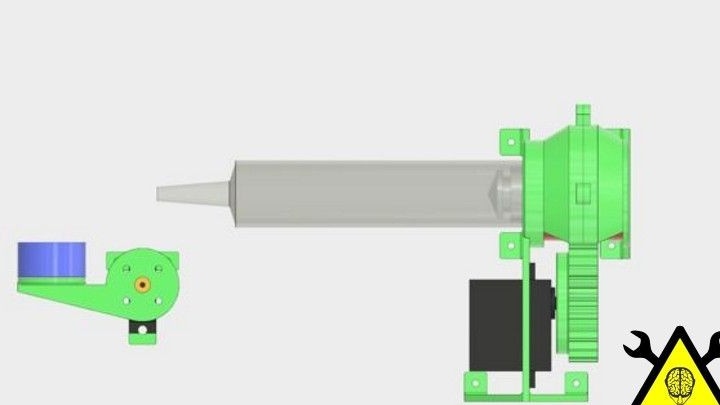
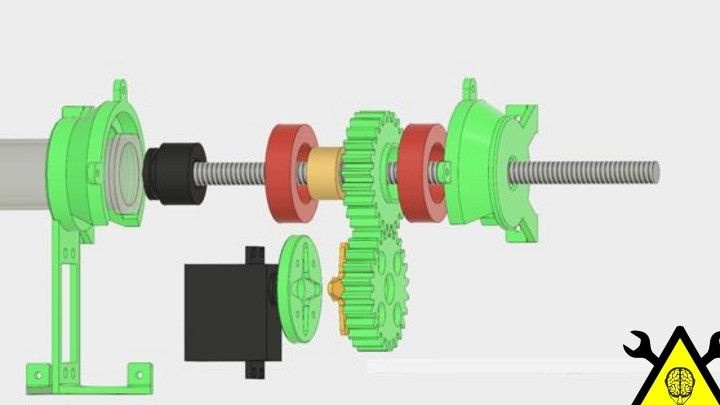
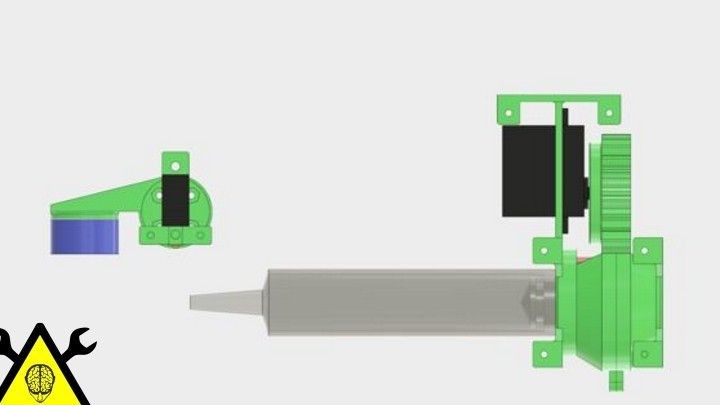
Bước sáu Gắn bộ phân phối
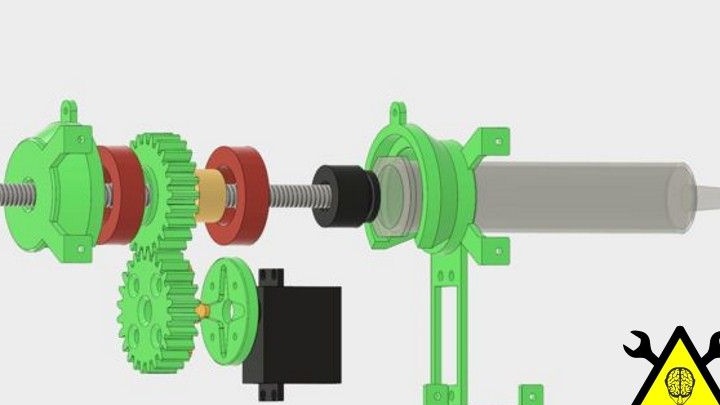
Cơ chế phức tạp nhất trong thiết bị là một ổ đĩa tuyến tính. Nhờ anh, liều lượng của dán xảy ra. Lõi của thiết bị là một thanh ren và đai ốc, với sự trợ giúp của điều này, ống được nén. Sáu ốc vít được sử dụng để bảo đảm ổ đĩa.
Bước thứ bảy. Phần mềm
Tổng cộng, chương trình có ba chức năng: cài đặt thời gian, đặt "báo thức" và cả chức năng khởi động thiết bị.
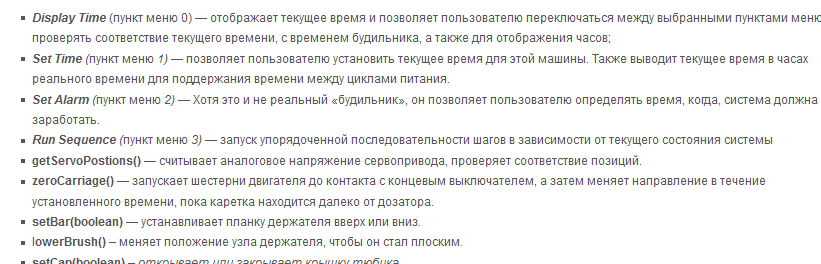
Đó là tất cả, sau khi flash và cấu hình thiết bị đã sẵn sàng để sử dụng.