


Chúc mọi người một ngày tốt lành! Trong bài viết này tôi muốn nói về cách sử dụng Arduino, một bộ đèn LED và cảm biến siêu âm, bạn có thể lắp ráp một thiết bị xác định khoảng cách từ người quan sát đến vật thể, nói cách khác, công cụ tìm phạm vi. Và vì vậy hãy đi!
Chúng ta cần gì:
Đồng bằng hộp. Đó là mong muốn có kích thước nhỏ, vì nó sẽ chỉ chứa một vi điều khiển.
Sử dụng đầu dò siêu âm HC-SR04 chúng ta có thể xác định khoảng cách.

Chỉ báo bốn chữ số chúng ta cần xuất các giá trị thu được.

Đặt Đèn LED bất kỳ màu nào (tôi đã sử dụng màu xanh lá cây, vì chúng sáng hơn), điện trở ở 220 ohms dây điện hoặc nhảy là tốt bánh mì.

Để các thành phần của thiết bị của chúng tôi được buộc chắc chắn, tôi sẽ hàn chúng.
Đối với điều này, chúng tôi cần hàn sắt, thông lượng, hàncũng như bánh mì cho hàn.
Và tất nhiên, không có Arduino chúng ta không thể làm được! (Bạn có thể chọn bất kỳ vi điều khiển nào, tôi thích Arduino Leonardo hoặc Iskra Neo tương đương của nó)

Trong số các công cụ chúng ta cần một que hàn, như tôi đã nói ở trên, dao và kềm.
Bây giờ hãy bắt đầu lắp ráp thiết bị.
Bước # 1
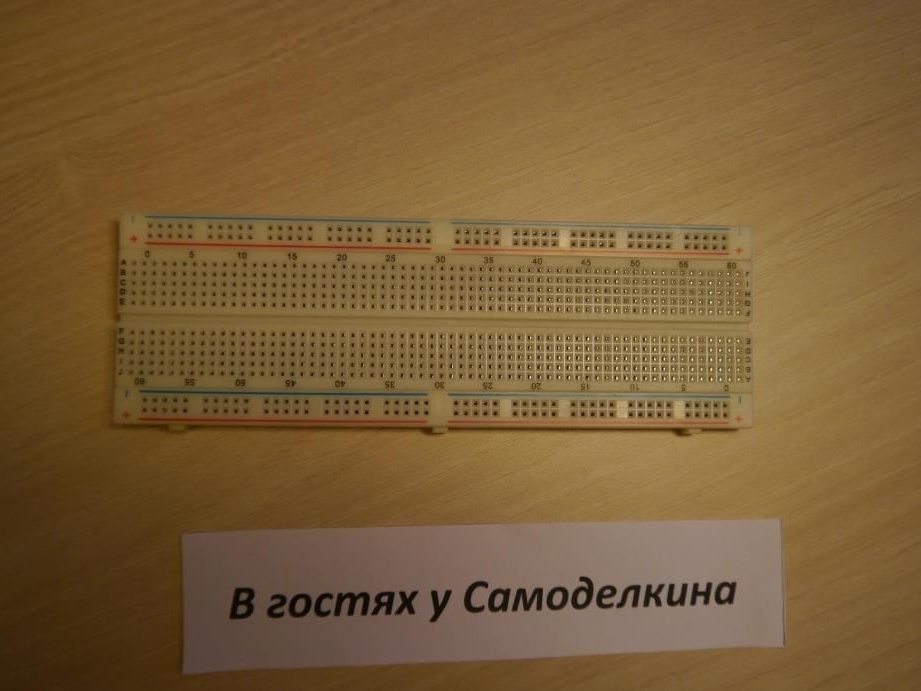
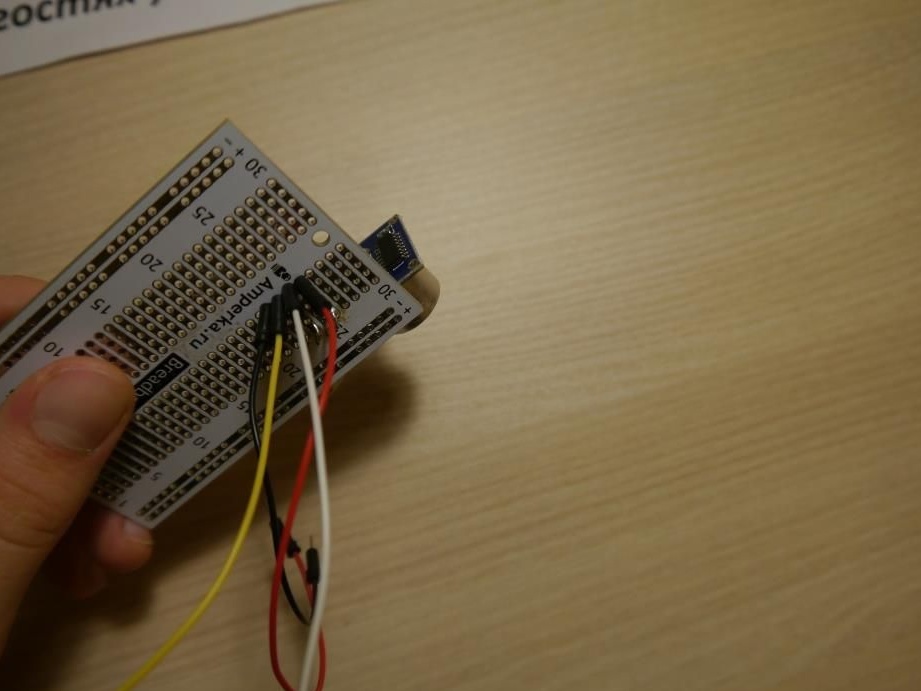
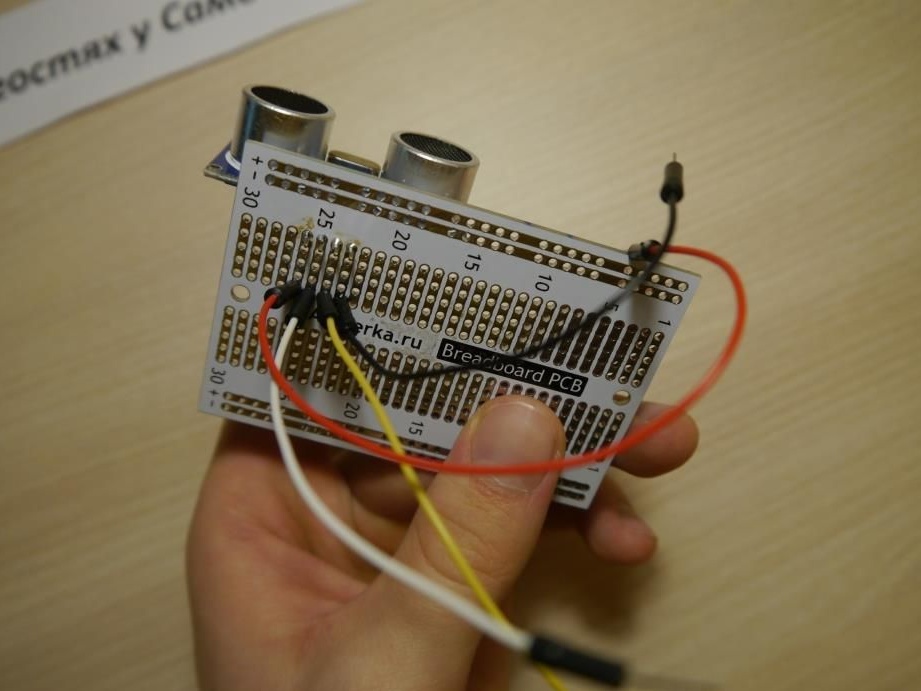
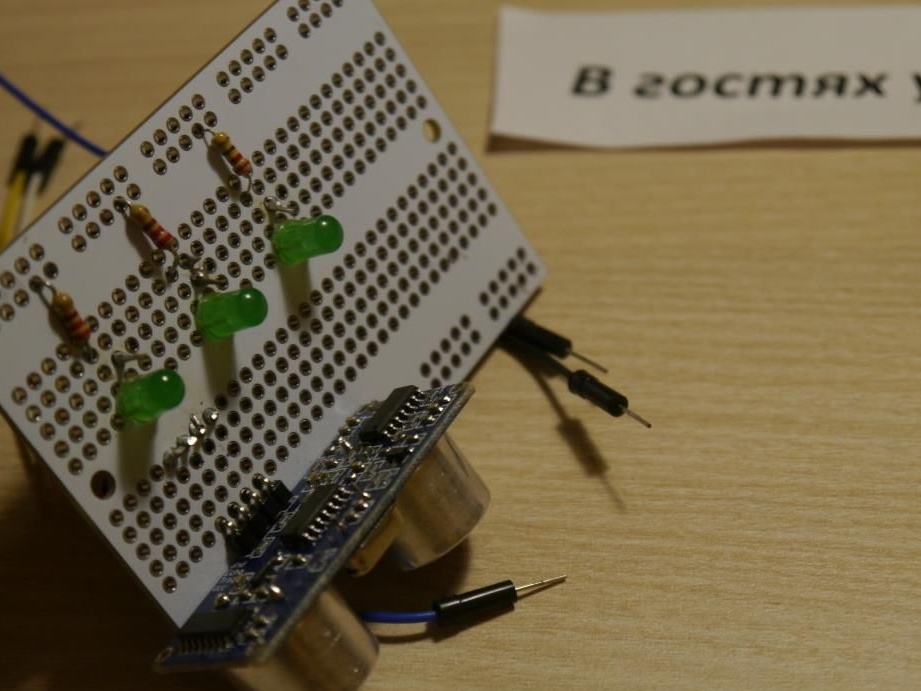
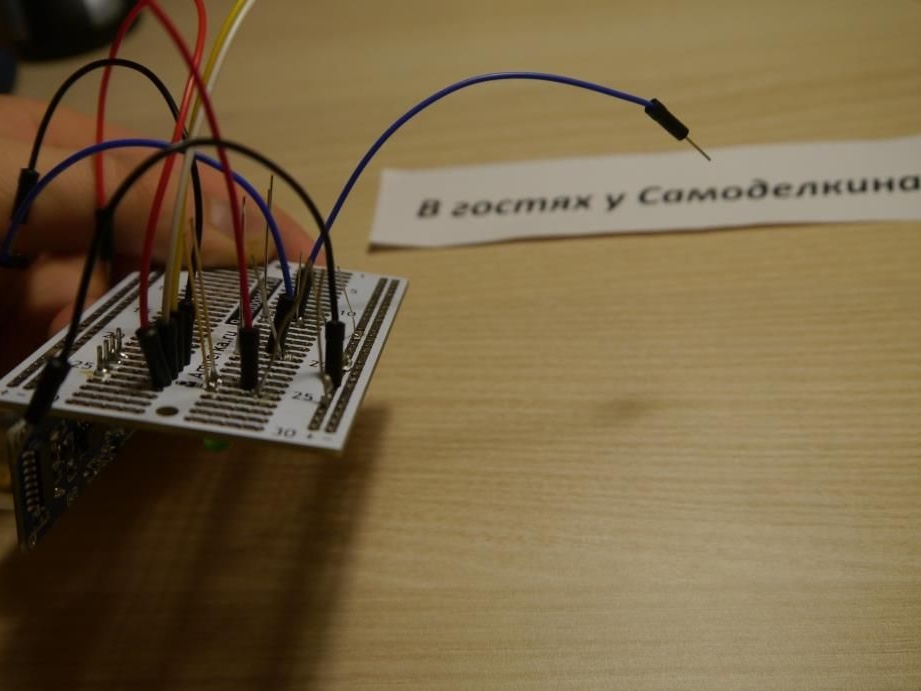
Để bắt đầu, sử dụng bảng mạch, chúng tôi sẽ lắp ráp một nguyên mẫu của thiết bị tương lai của chúng tôi. Nó sẽ trông giống như thế này ..

Đừng lo lắng! Không có gì khủng khiếp trong mớ dây lộn xộn này!
Cảm biến HC-SR04 có bốn chân: cộng, trừ (chúng tôi dính vào 5V và GND của bộ điều khiển), Trig và Echo (chúng tôi lần lượt chèn các chân arduino vào 12 và 11)
Chỉ báo bốn chữ số có 3 dây: nguồn, đất và tín hiệu. Cái sau được kết nối với Arduino 9 pin.
Chúng tôi kết nối ba đèn LED với 6, 5 và 4 tiếp điểm của bộ điều khiển nối tiếp với các điện trở. Đừng quên về sự phân cực. Dòng chảy từ chân dài đến chân ngắn hơn.
Đó là tất cả, khi chúng tôi lắp ráp thiết bị của mình trên một chiếc bánh mì, đã tải lên bản phác thảo (nó sẽ ở cuối bài viết) và đảm bảo rằng mọi thứ đều hoạt động, hãy thoải mái bắt đầu hàn.
Bước số 2
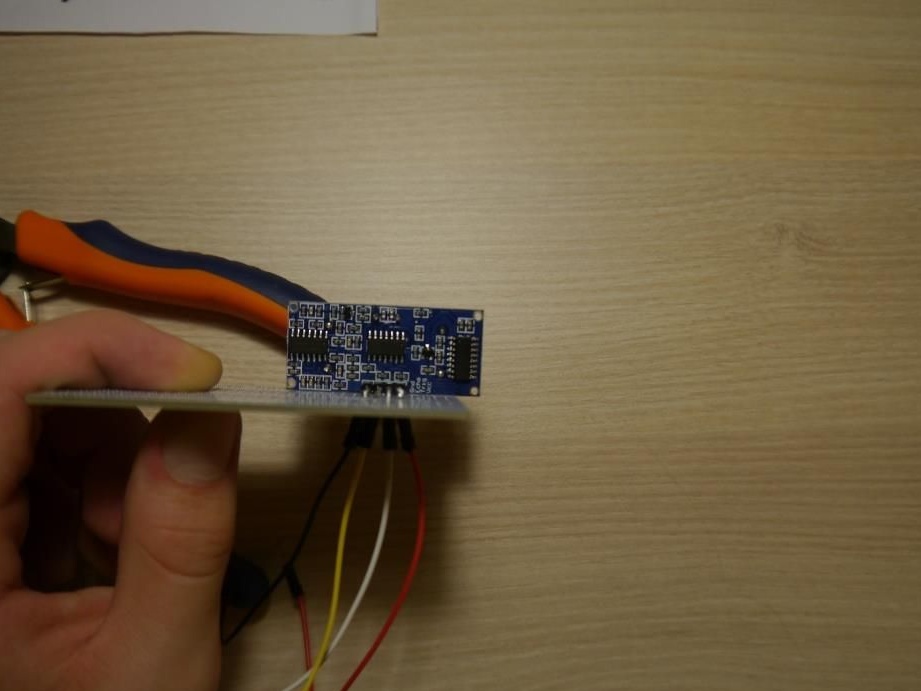
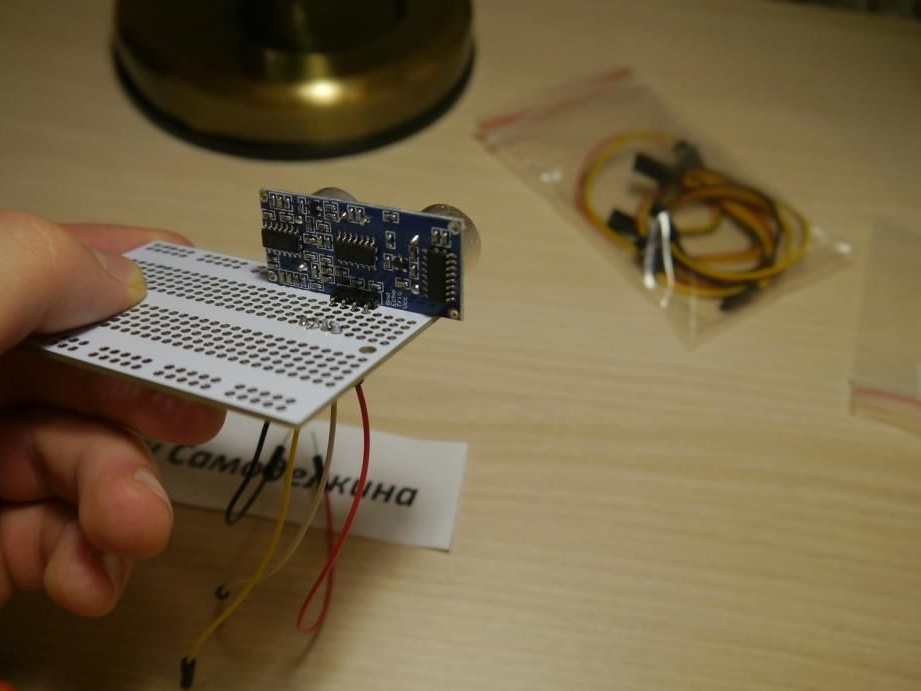
Đầu tiên, hàn cảm biến siêu âm vào bảng. Tôi đã sử dụng một chiếc bánh mì nhỏ có kích thước, vì số lượng phần tử không vượt quá 7.

Sau đó, với sự giúp đỡ của kềm, cắn đứt chân (tôi xin lỗi vì tautology), làm cho chúng ngắn hơn để chúng không can thiệp và trông xinh hơn!

Sau đó, hàn bốn dây với các tiếp điểm cảm biến.
Cũng đừng quên về kềm!
Bước # 3
Cảm biến được đặt đúng chỗ, nó vẫn để hàn ba đèn LED cùng với điện trở.
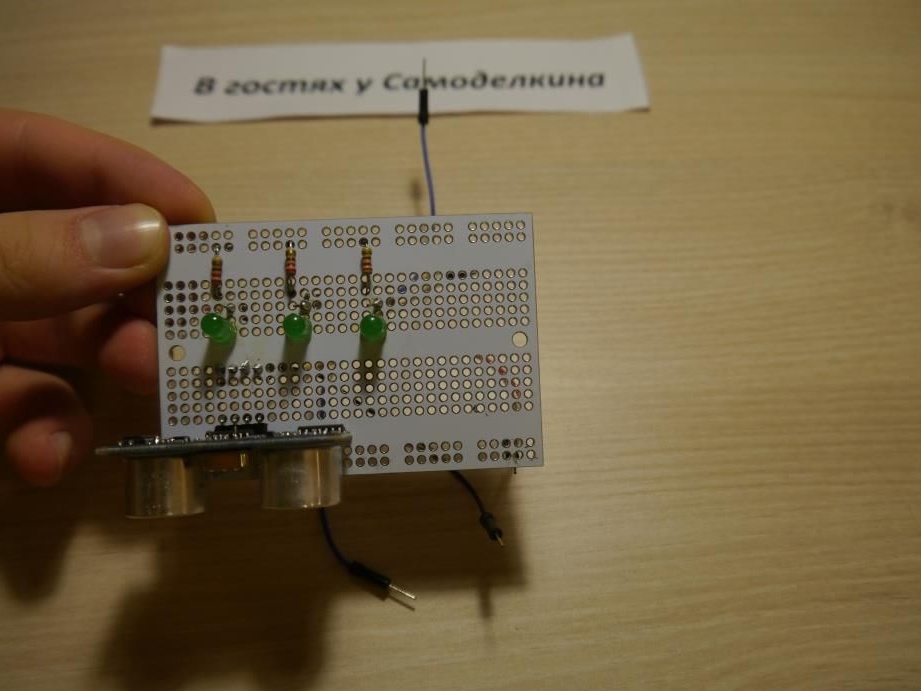
Ở mặt trái, nó trông như thế này:
Bước # 4
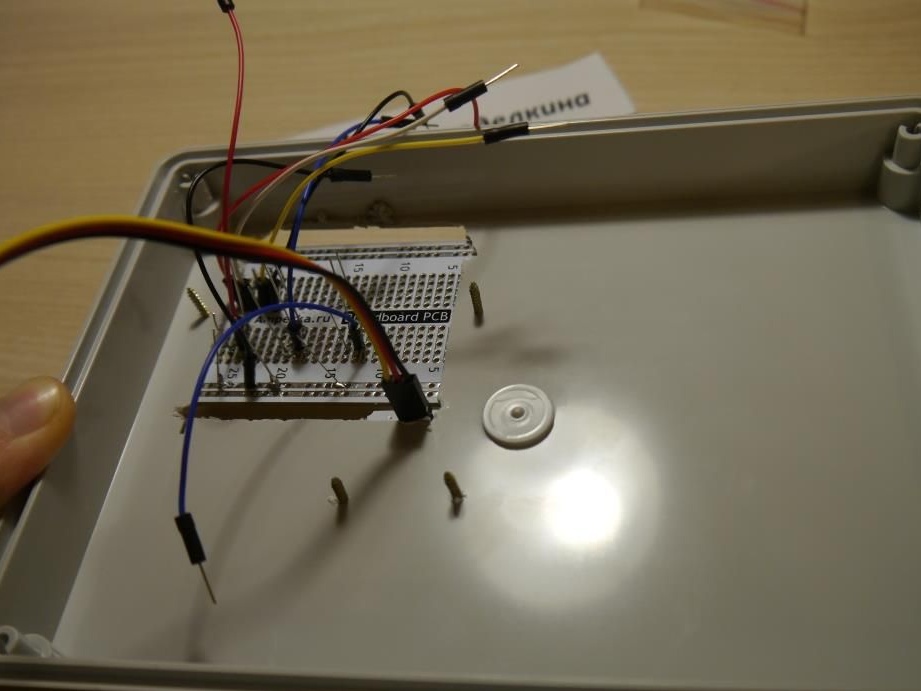
Trên mặt của hộp, cắt một lỗ tròn cho thực phẩm.

Trên nắp, bạn cần cắt một khoang với kích thước (nhỏ hơn một chút về chiều dài) của bánh mì của bạn, và cũng khoan lỗ cho ốc vít.


Bây giờ, nếu chúng ta vặn một cái bánh mì rỗng không có các yếu tố trên đó (tôi đã làm nó chỉ để trình diễn ..), chúng ta sẽ nhận được một cái gì đó như sau:

Bước # 5
Vì vậy, để làm cho nó thuận tiện hơn, trước tiên tôi đề xuất kết nối dây với arduino, và chỉ sau đó vặn bánh mì vào nắp hộp. Ngoài ra, đừng quên chỉ số của chúng tôi, mà tôi đã đặt phía trên bố cục.



Tất cả mọi thứ trên lắp ráp thiết bị này đã hoàn tất!
Nó chỉ còn để tải xuống tiếp theo phác họa và thưởng thức đồ chơi!
#incolee
#incolee
Sonar NewPing (12.11, 400);
int a, j, b;
không dấu dài t = 0;
int masiv [] = {1,0,0,0,1,0,0,0,1};
thiết lập void ()
{
cho (int i = 4; i & lt; 7; i ++)
{
pinMode (i, OUTPUT);
}
hiển thịClear (9);
cho (int i = 4; i & lt; 7; i ++)
{
kỹ thuật sốWrite (i, 0);
}
}
vòng lặp void ()
{
j = 7;
cho (int i = 0; i100) âm (2,70);
kỹ thuật sốWrite (j, masiv [i]);
while (millis () & lt; = t + b)
{
trì hoãn (50);
a = sonar.ping_cm ();
displayInt (9, a);
b = a;
}
t = millis ();
if (j == 4) j = 7;
nếu (i == 8)
{
kỹ thuật sốWrite (4.1);
while (millis () & lt; = (t + b) + (b * 2))
{
trì hoãn (50);
a = sonar.ping_cm ();
displayInt (9, a);
b = a;
}
kỹ thuật sốWrite (4.0);
t = millis ();
}
}
Một vài từ mã chương trình. Nhờ có anh, ba đèn LED của chúng tôi sẽ lần lượt nhấp nháy, và tốc độ nhấp nháy của chúng sẽ phụ thuộc vào khoảng cách đến vật thể, được tính bằng cảm biến siêu âm. Nhưng để làm cho đèn LED nhấp nháy, việc sử dụng hàm delay () không hoàn toàn hợp lý, vì khi được sử dụng, bộ điều khiển đóng băng và không có phép tính nào được thực hiện. Có một số cách để giải quyết vấn đề này. Cụ thể, một trong số đó là việc sử dụng hàm millis (), trả về một số tính bằng mili giây kể từ thời điểm bộ điều khiển hoạt động. Và làm thế nào để chúng ta trì hoãn 100 mili giây có điều kiện? Để làm điều này, tôi đã tạo ra một chu kỳ trống cơ bản, lối ra từ đó sẽ chỉ sau 100 mili giây này, và sau đó chương trình tiến hành bật / tắt đèn LED.
Vâng đó là tất cả! Cảm ơn bạn đã đọc bài viết này đến cuối cùng. Tôi hy vọng bạn không chỉ thích cô ấy, mà còn truyền cảm hứng cho một vùng biển mới hàng thủ công và phát minh!