
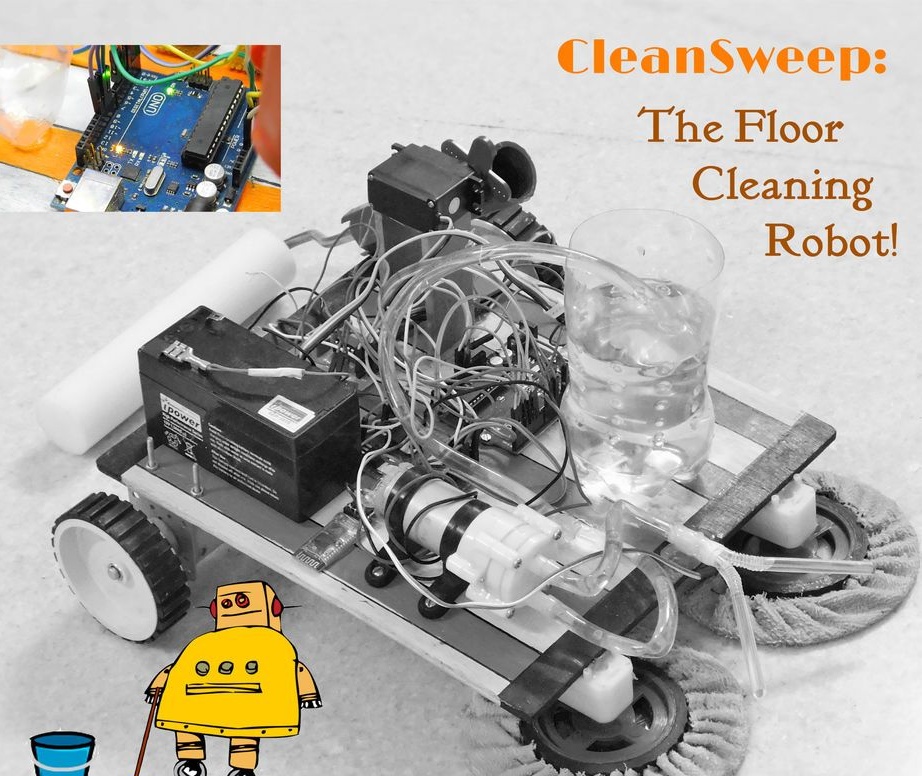


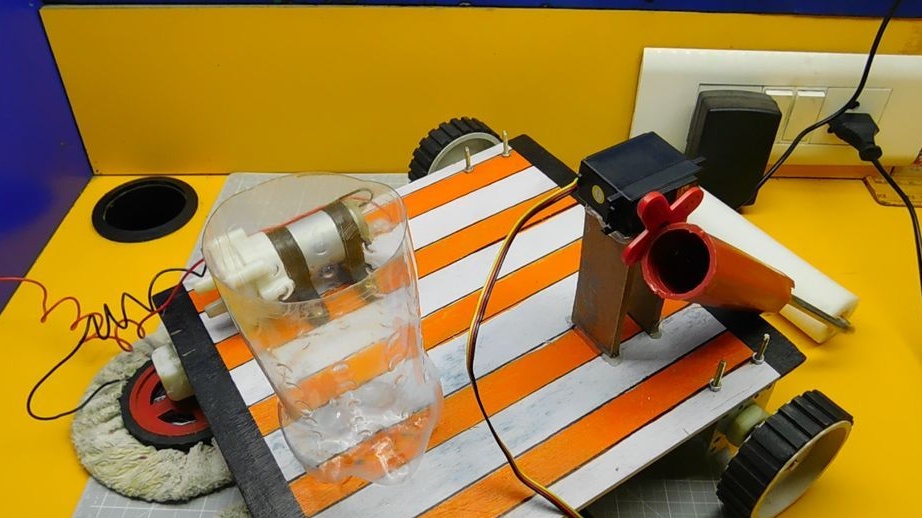
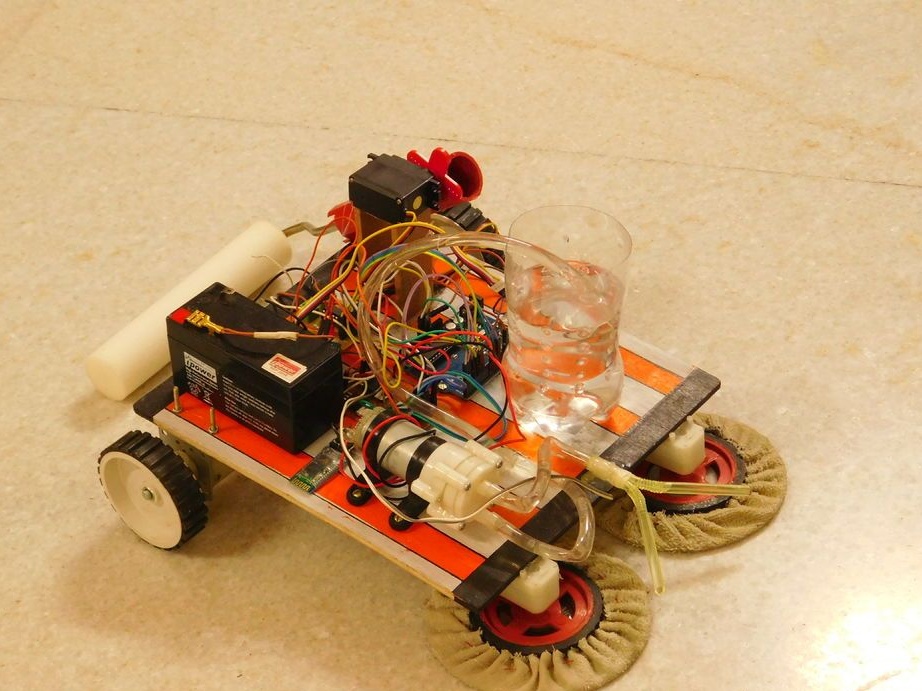
RobotMáy gặt đập có trong kho vũ khí của mình hai bàn chải xoay được gắn ở mặt trước của trục bánh răng. Hộp số quay với tốc độ 75 vòng / phút. Robot có một bể chứa nước trên tàu. Một con lăn được cố định ở phía sau của robot. Robot được trộn với sự trợ giúp của các bánh xe cố định trên trục của bánh răng. Trình dọn dẹp được điều khiển bằng điện thoại thông minh qua bluetooth. Trong tương lai, Master có kế hoạch làm cho robot hoàn toàn tự chủ. Hãy xem cách thiết bị này hoạt động.
Dụng cụ và vật liệu:
-Máy truyền động 100 vòng / phút -2 chiếc;
-Wheels cho động cơ -2 chiếc;
-Máy giảm tốc có bánh xe 75 vòng / phút - 2 chiếc;
-Arduino UNO;
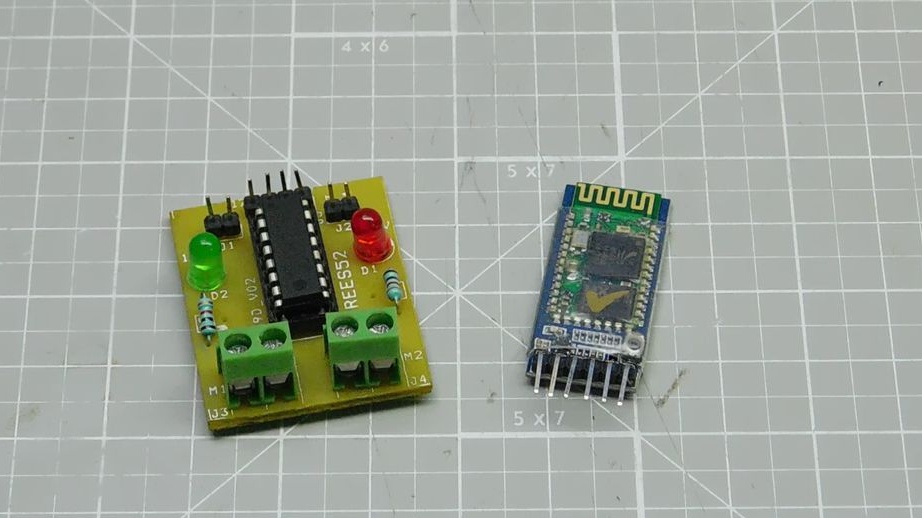
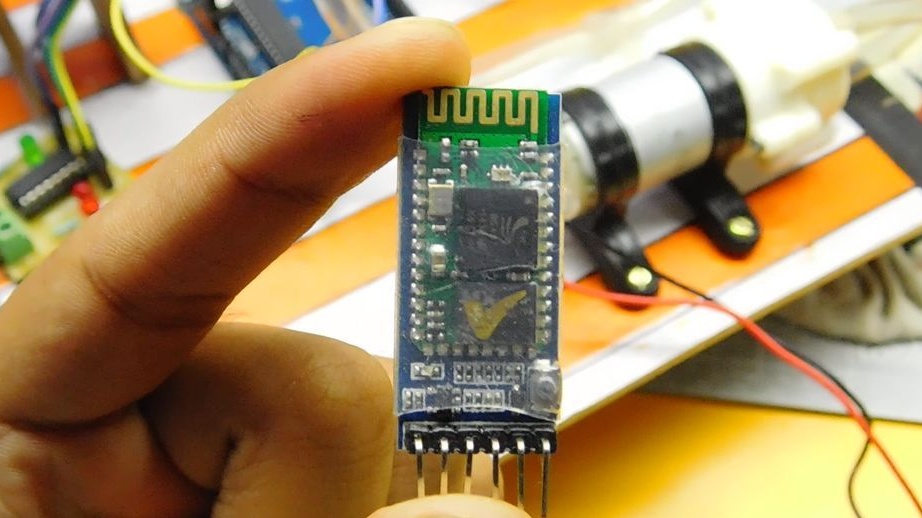
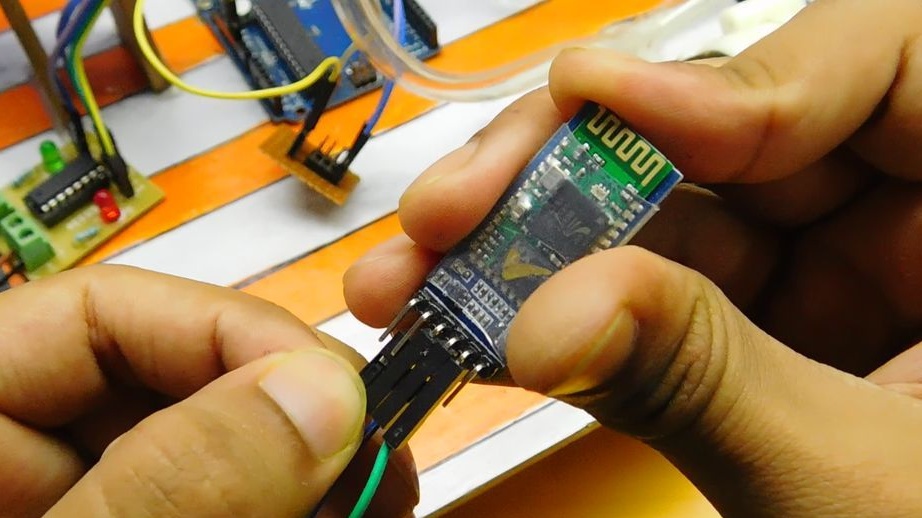
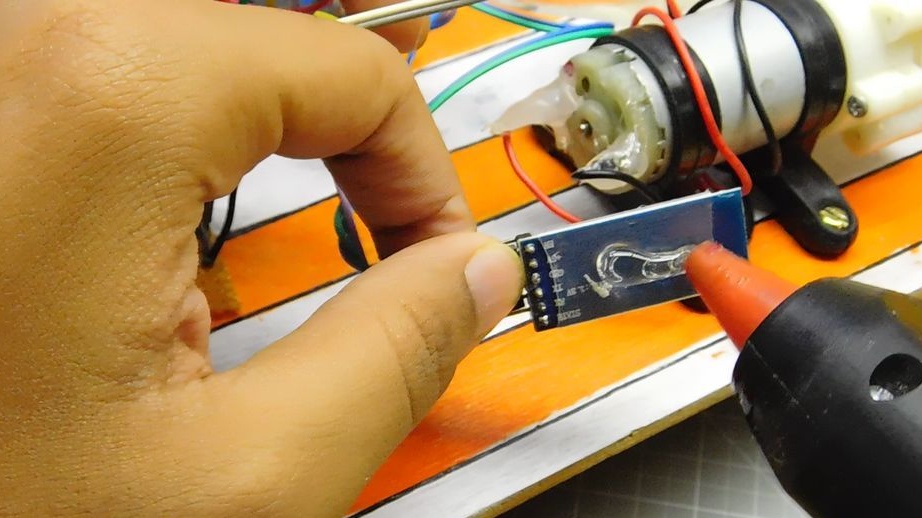
- Mô-đun Bluetooth HC-05/06;
-Driver L293D;
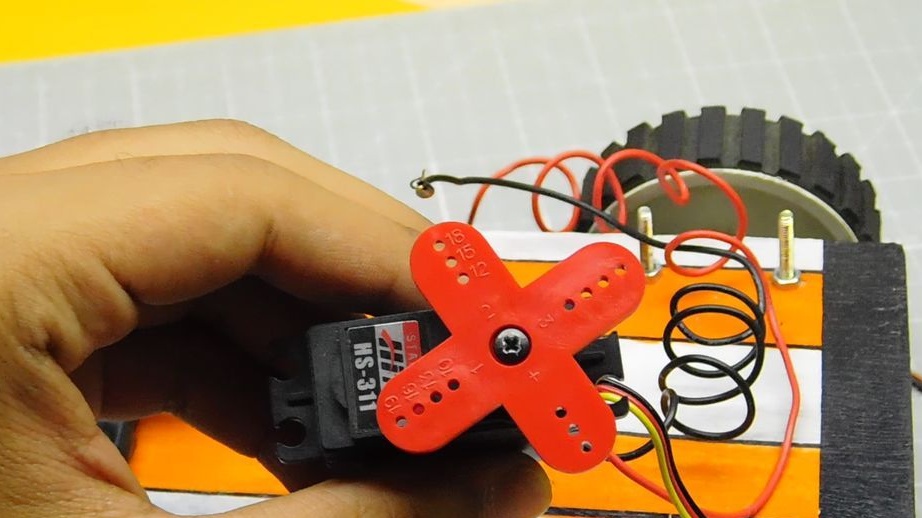
- Động cơ servo (xoay 180 độ);
Pin -12V;
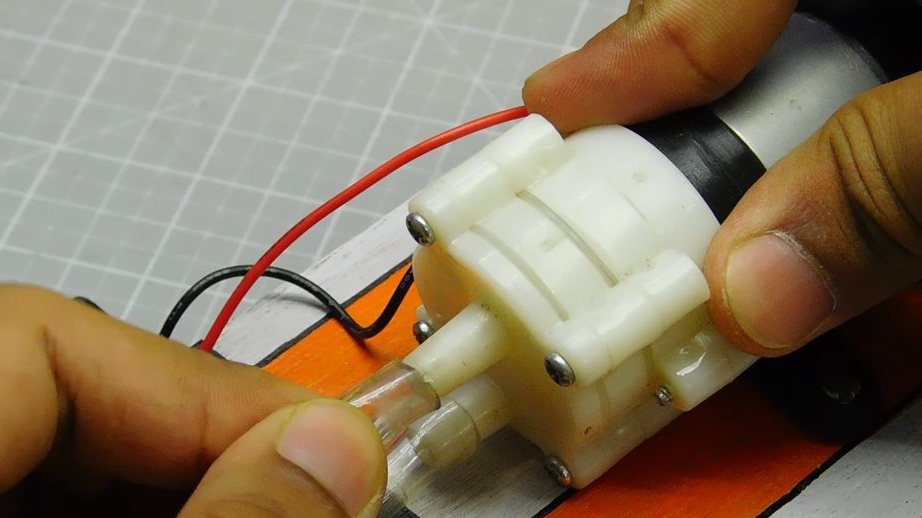
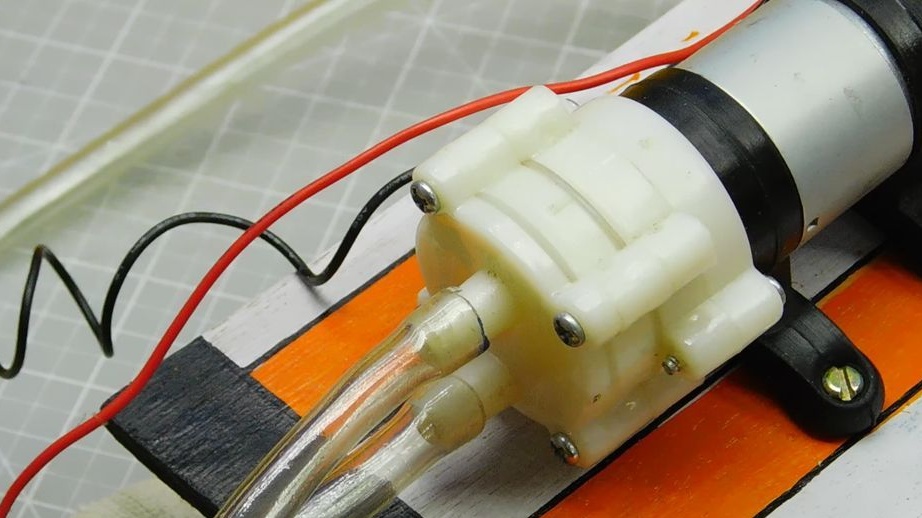
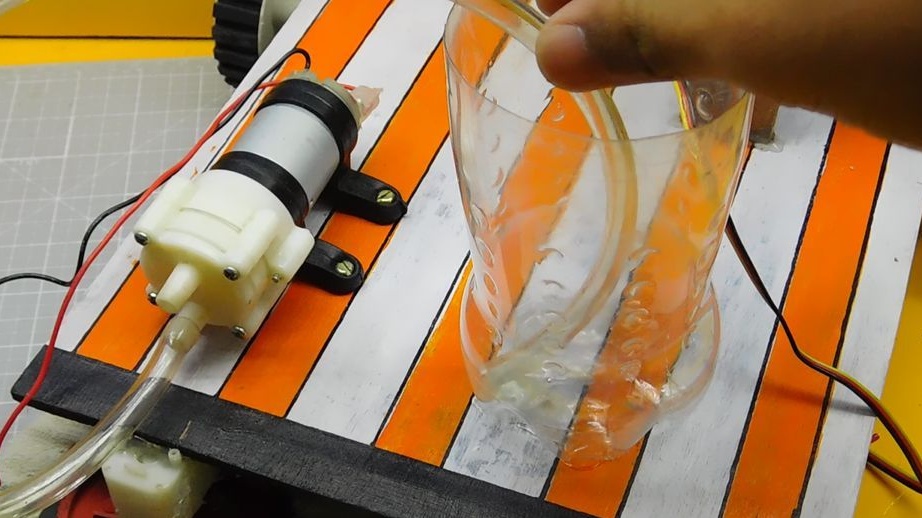
- Bơm 12 V;
Transitor TIP31C;
Transitor TIP122;
- Ổ đĩa CD - 2 chiếc.;
- Con lăn sơn;
- Khăn ăn bằng vải;
- Kim có chỉ;
-Tube;
-Wire;
- Nhảy cầu;
-Bán bảng;
-Fastener;
-Làm dán;
- Chai nhựa dẻo;
-Sanh sắt;
Súng -Gue;
-Drill;
- Kìm;
-Drasher;
- bàn chải;
-Phải;
-Marker;
- kéo;











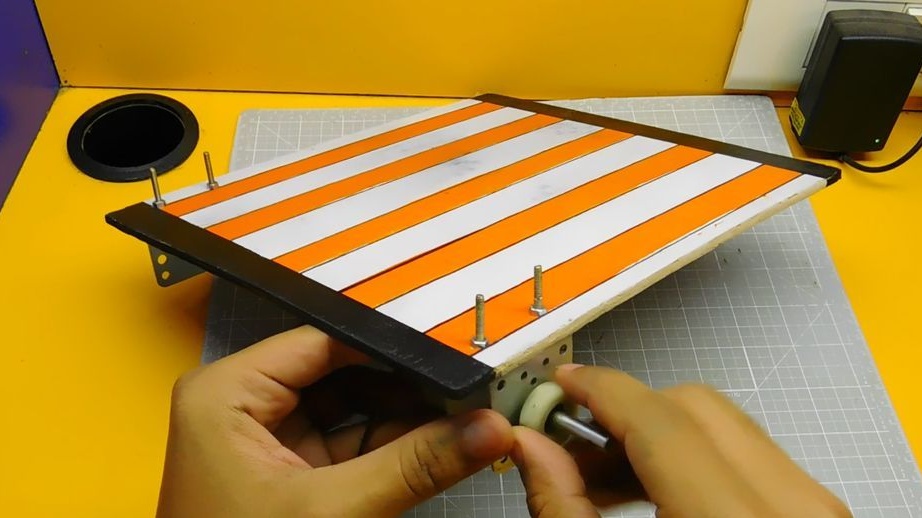
Bước một: Nền tảng
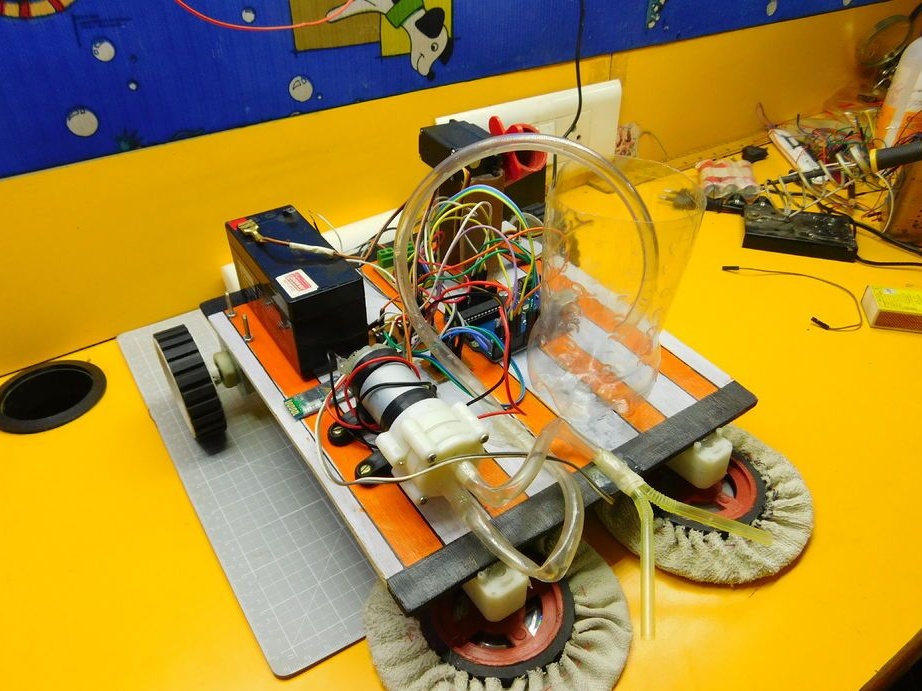
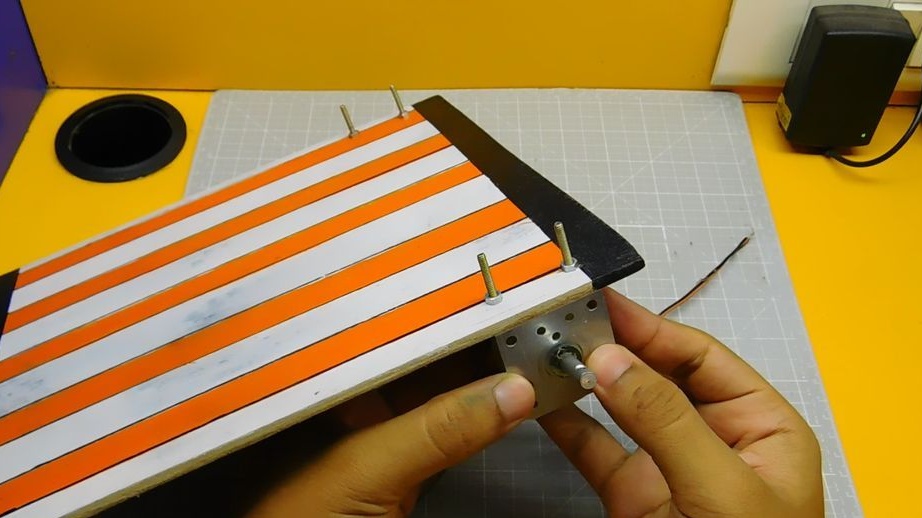
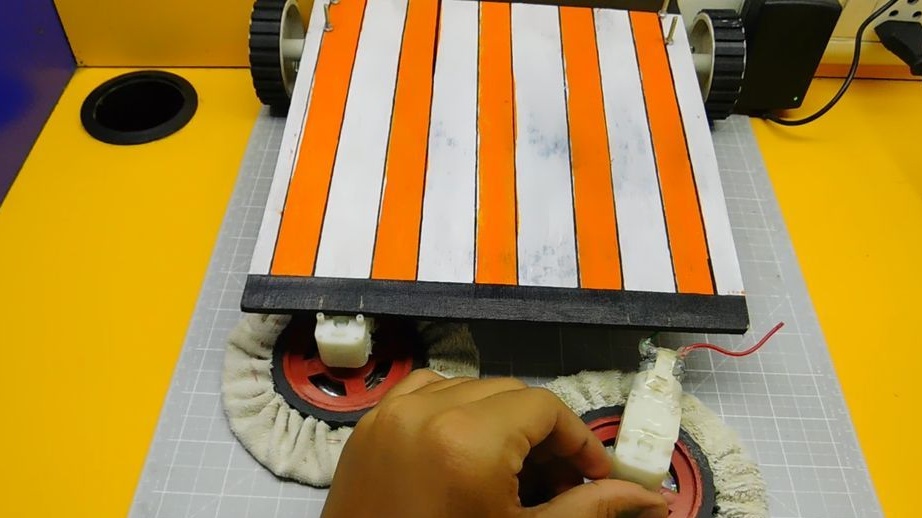
Từ ván ép cắt cơ sở. Các kích thước của cơ sở là 30 * 22 cm. Vẽ cơ sở. Một mặt, nó sửa chữa động cơ bánh răng. Đồng thời sửa chữa động cơ bánh răng ở phía bên kia của cơ sở.



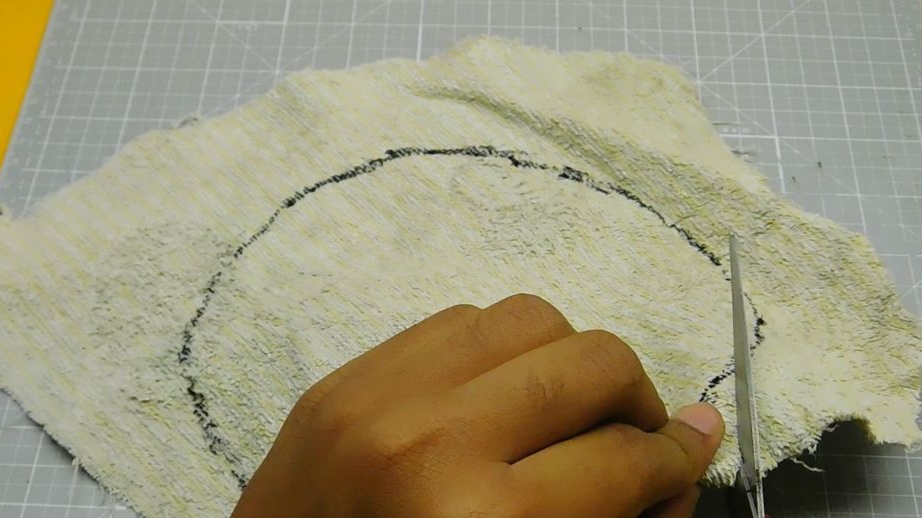
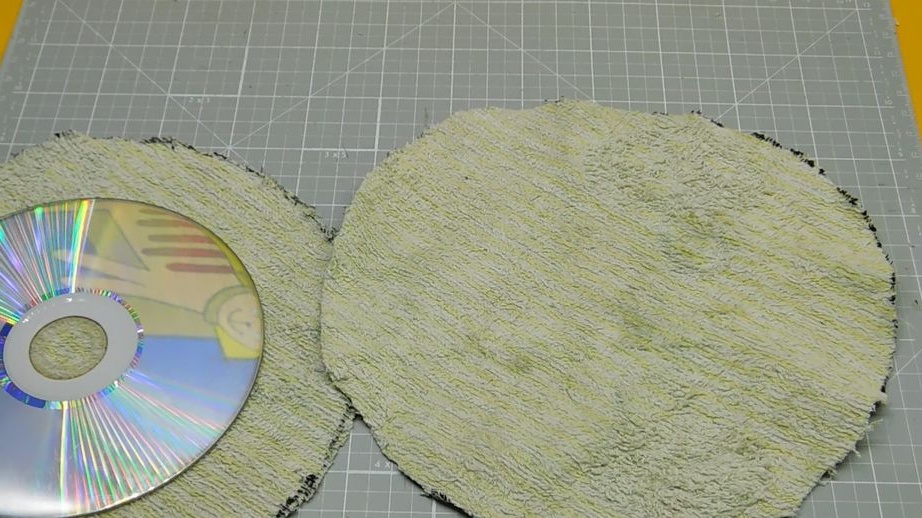
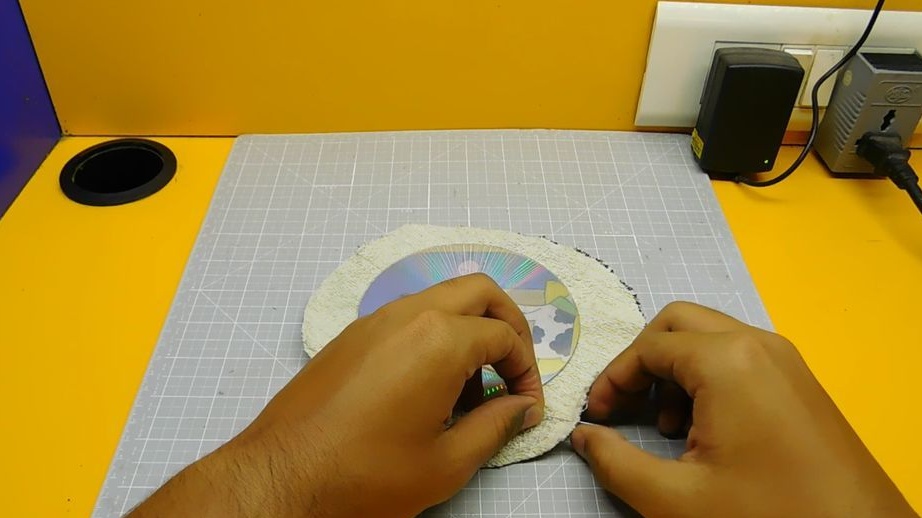
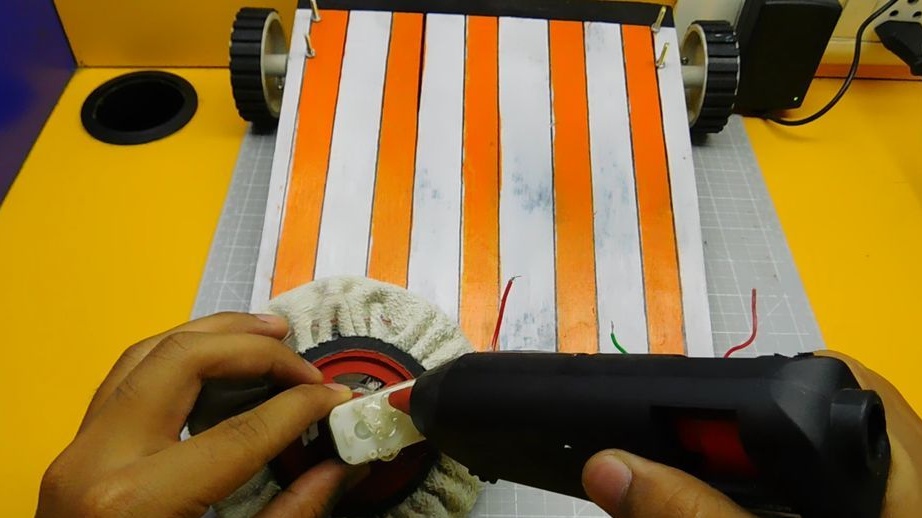
Bước hai: Bàn chải
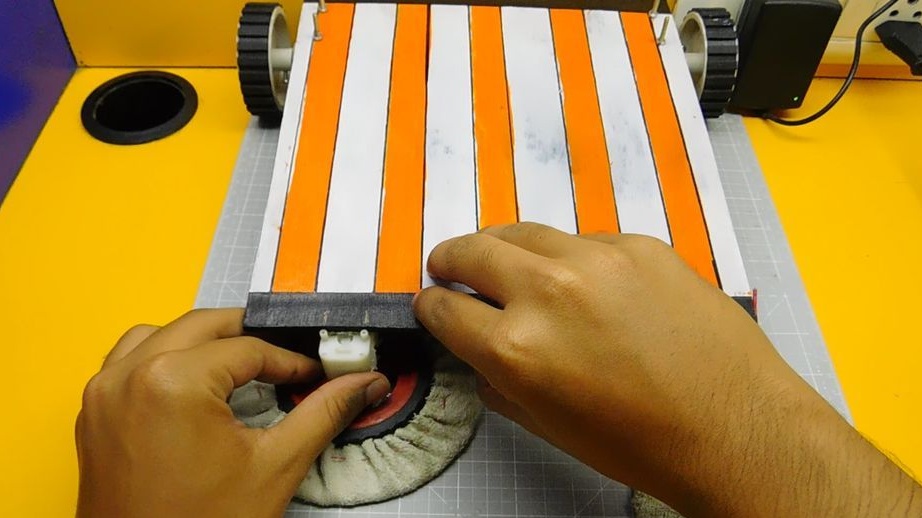
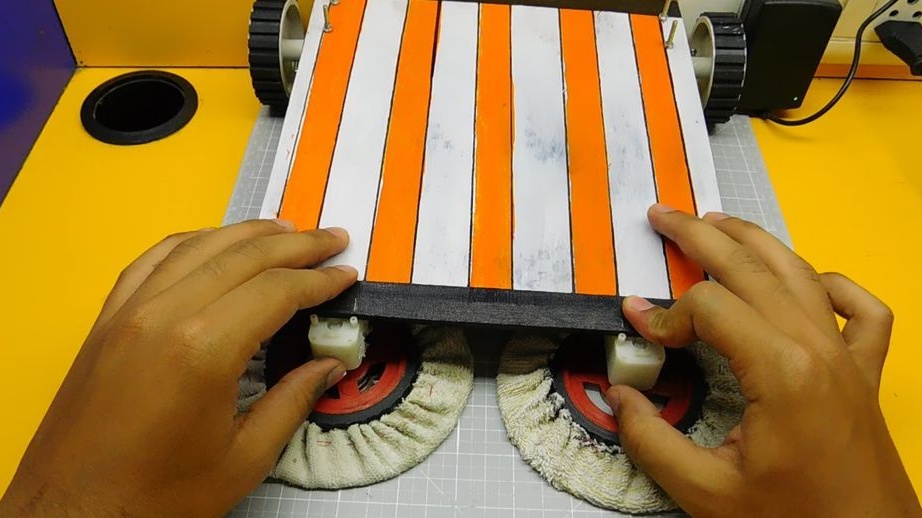
Các bậc thầy làm bàn chải từ đĩa CD cũ. Cắt một miếng giẻ. Bao bọc ổ đĩa của cô. Hoạt động lặp đi lặp lại với một đĩa khác. Bảo vệ đĩa bằng keo nóng chảy trên bánh xe. Đảm bảo cả hai động cơ bánh răng trước nền tảng.








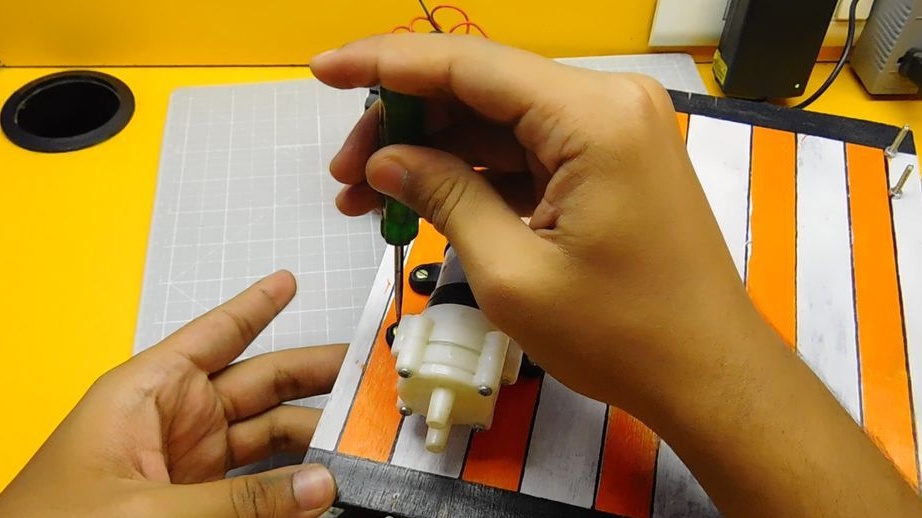
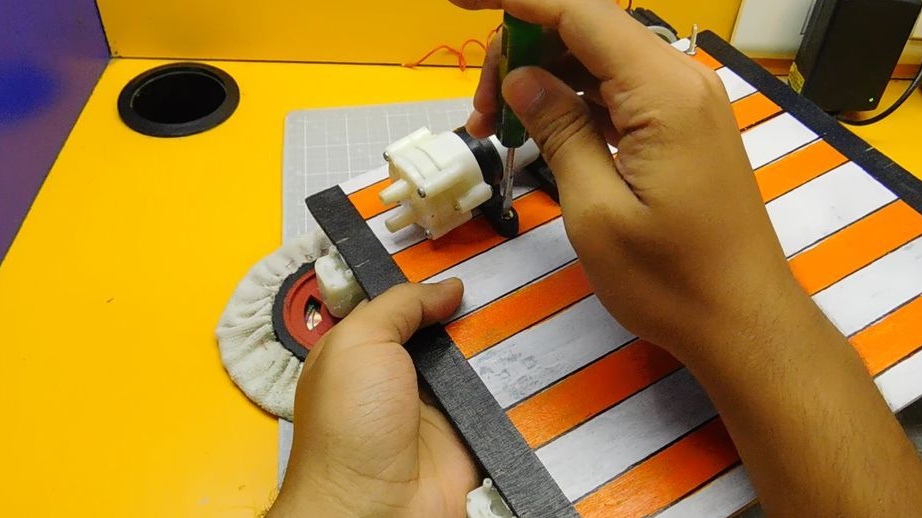
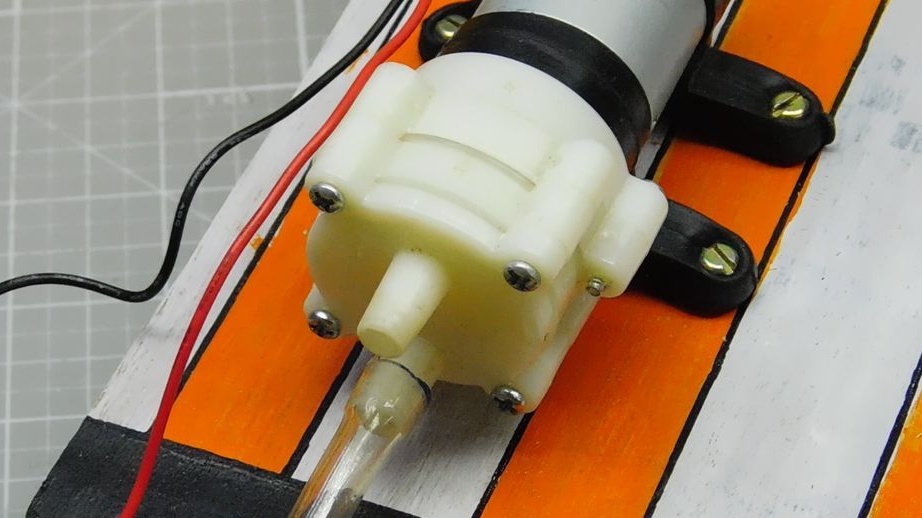
Bước hai: Cấp nước
Bảo vệ máy bơm vào nền tảng. Cắt bỏ phần trên của một chai nhựa. Bảo vệ chai vào nền tảng. Lắp đặt ống dẫn nước. Sau đó, đường ống cấp nước đến bàn chải sẽ được cố định.




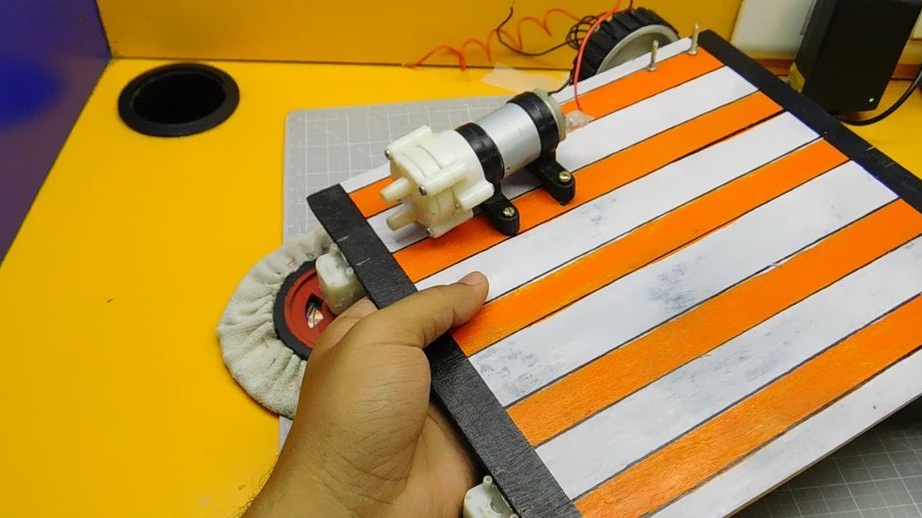




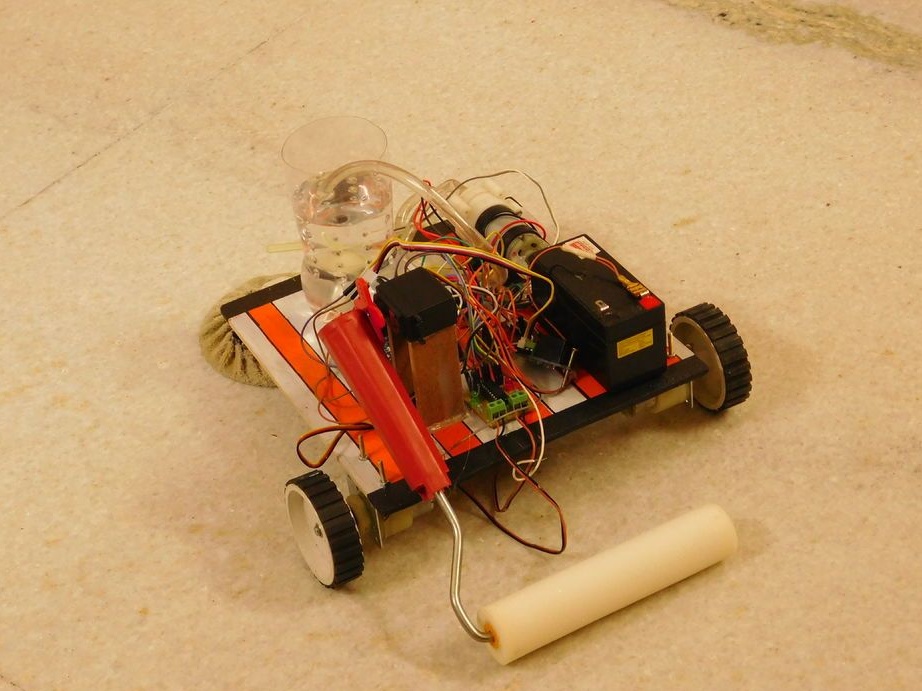
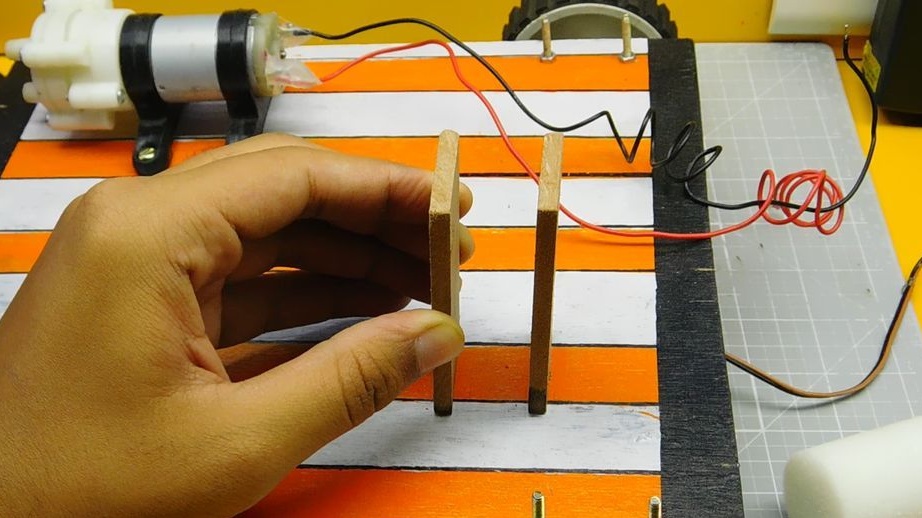
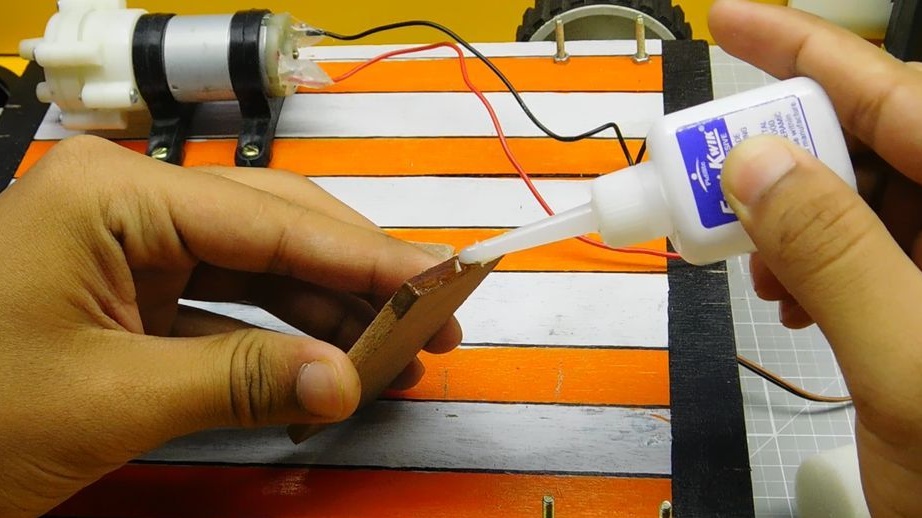
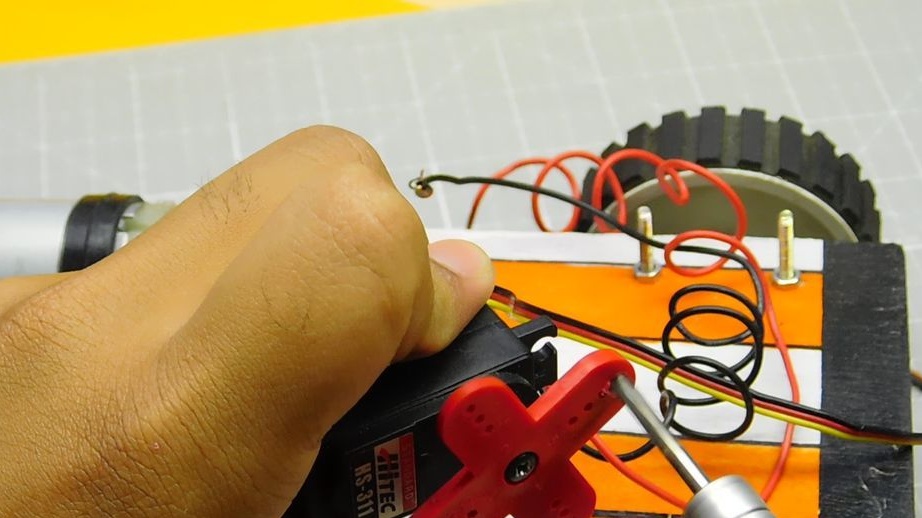
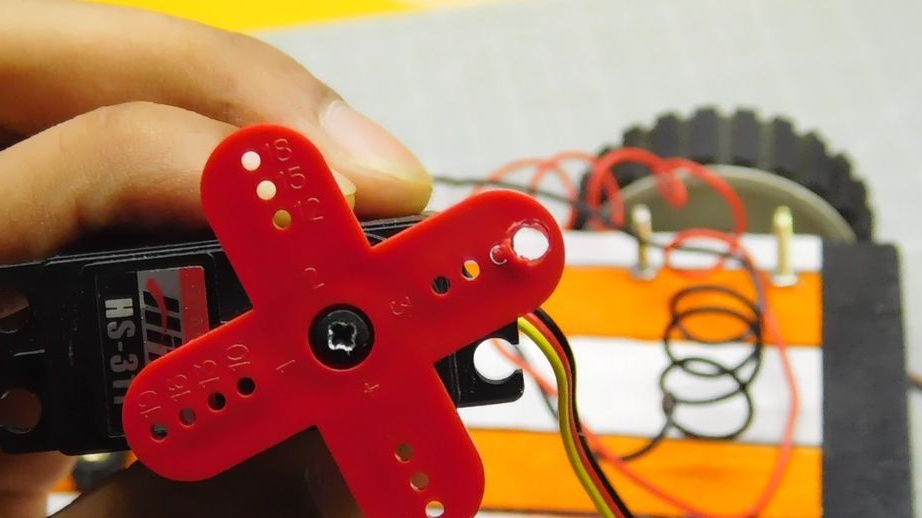
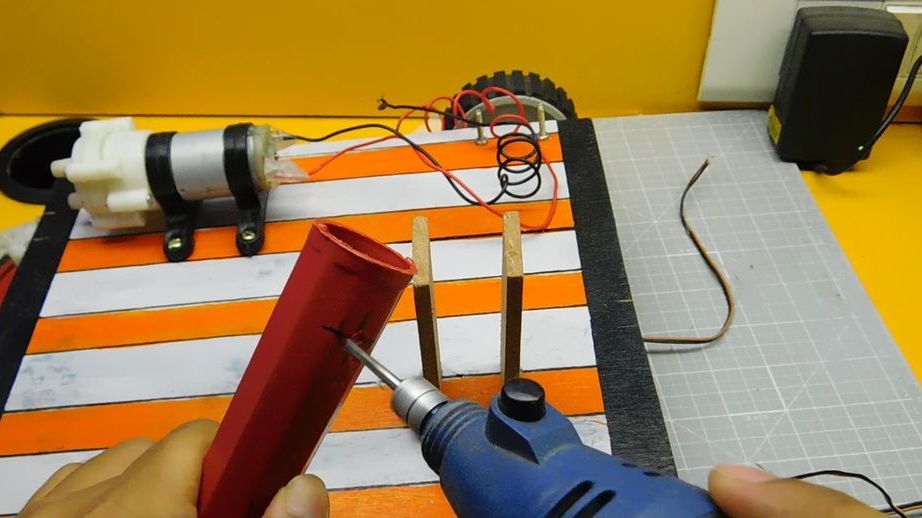
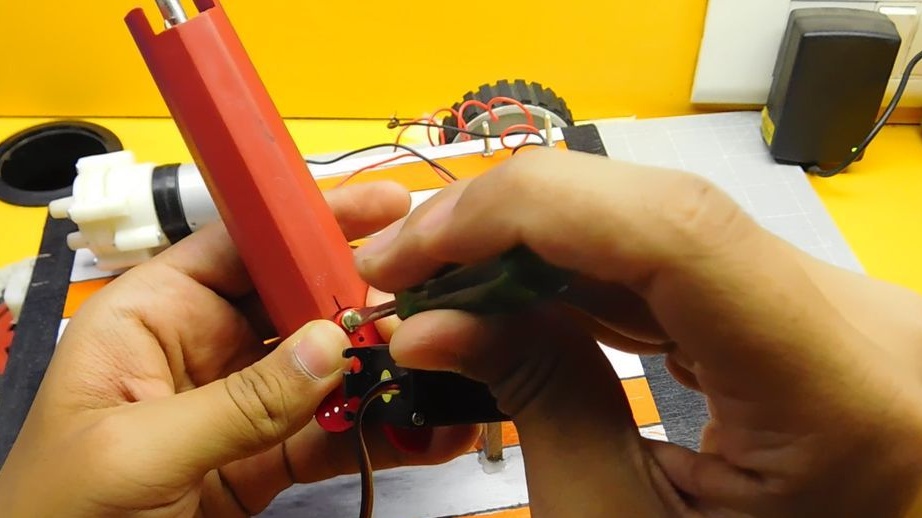
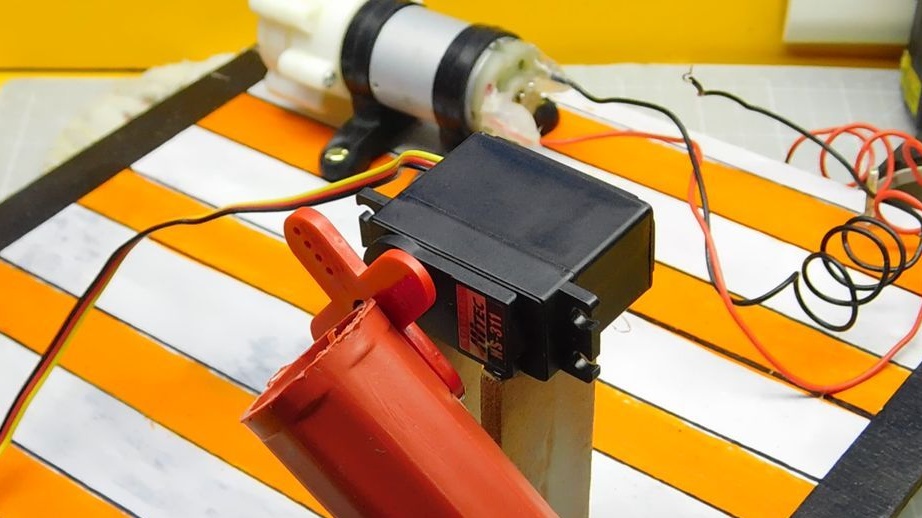
Bước ba: Cơ chế nâng con lăn
Nhiệm vụ của con lăn là thu thập bụi mịn. Do con lăn thỉnh thoảng cần thiết, chủ đã quyết định chế tạo một cơ chế nâng và hạ con lăn. Sửa hai thanh trên nền tảng song song với nhau. Làm cho hai lỗ, một trong đòn bẩy servo, cái thứ hai trong tay cầm con lăn. Vít tay cầm con lăn vào đòn bẩy. Bảo vệ servo cho các thanh.


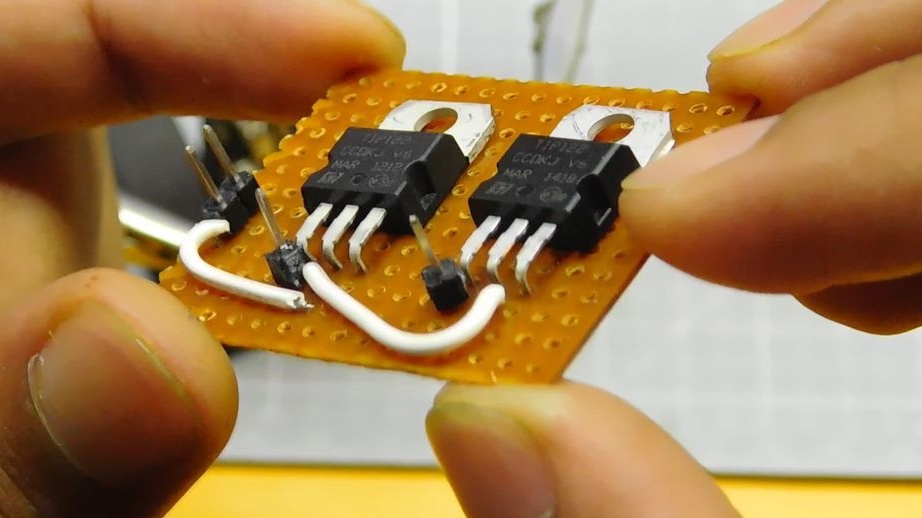
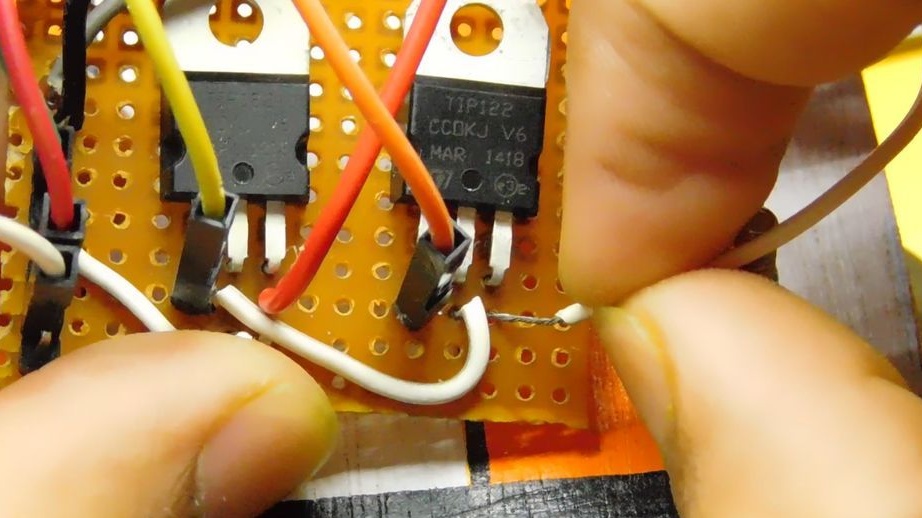
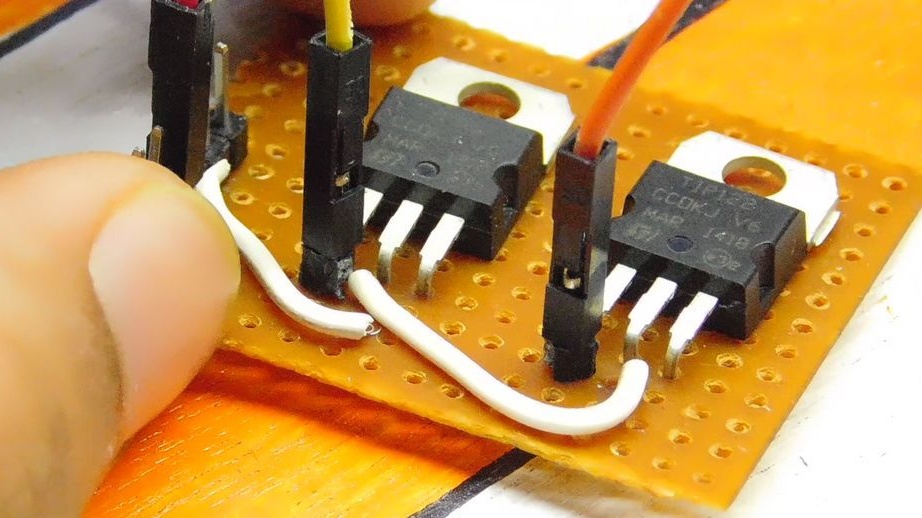
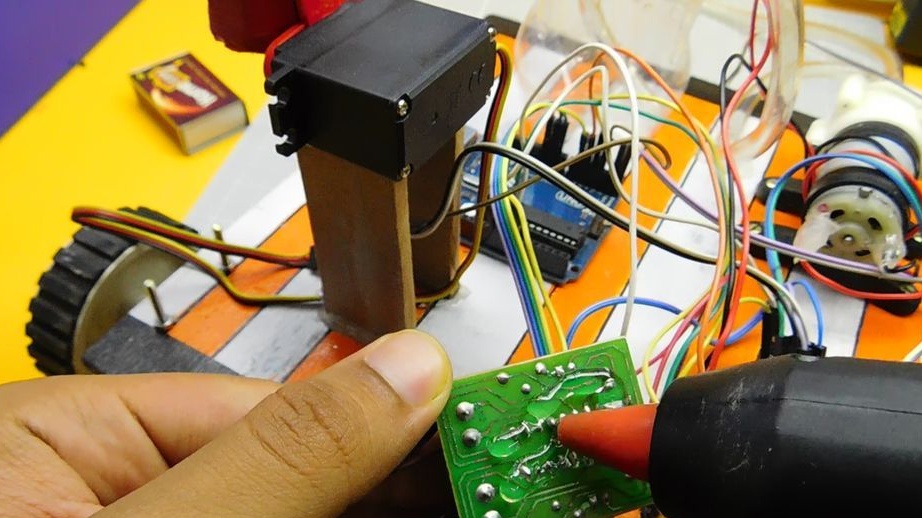
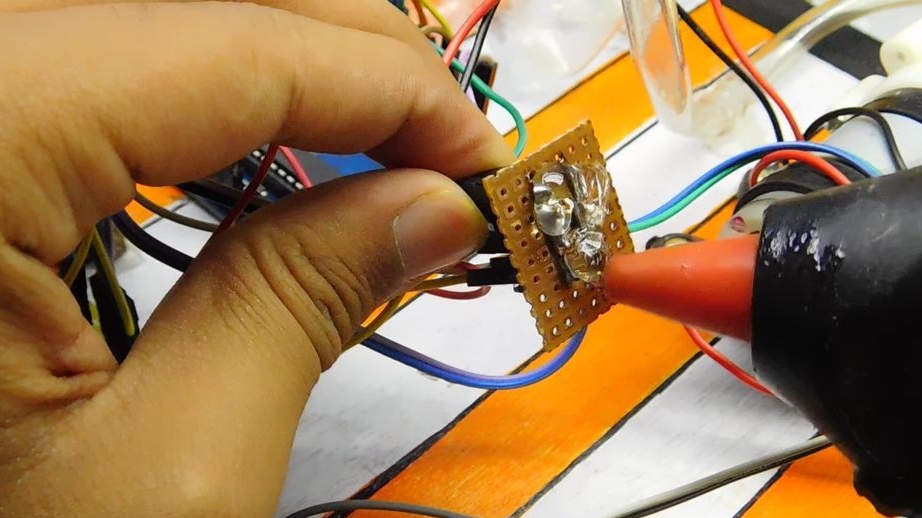
Bước bốn: Transitor
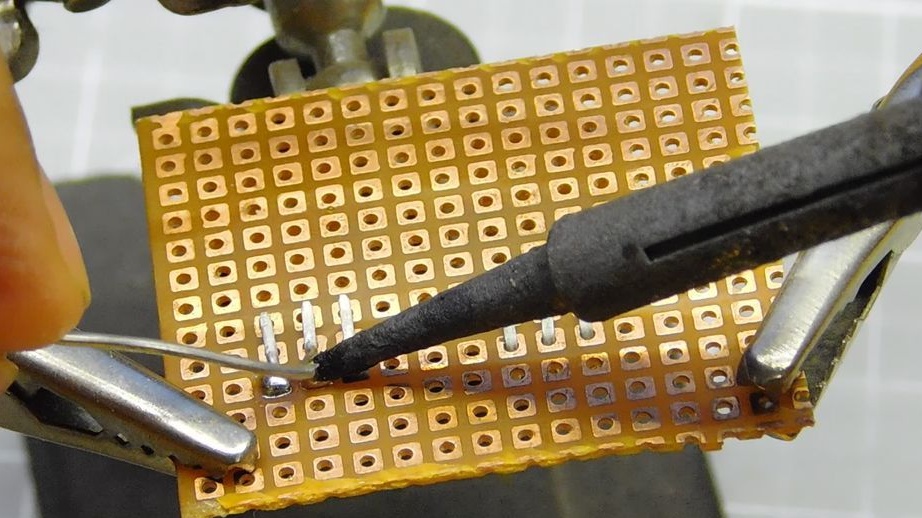
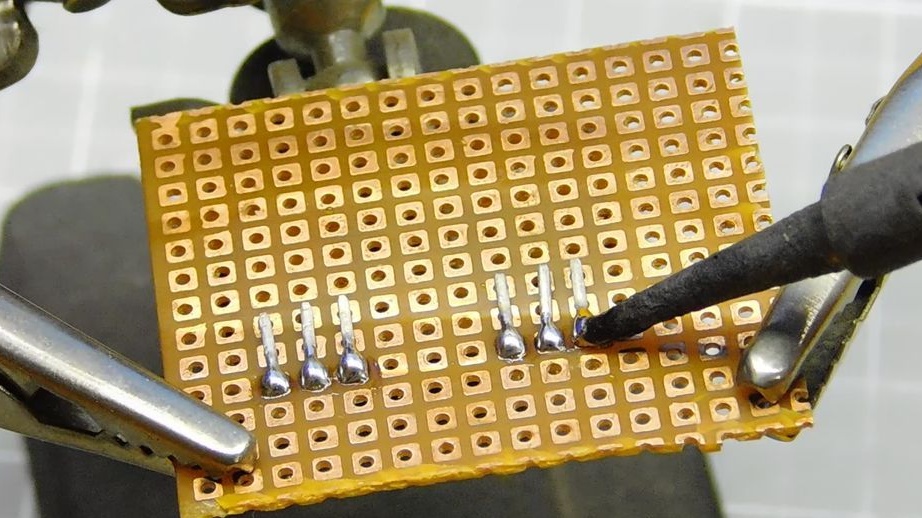
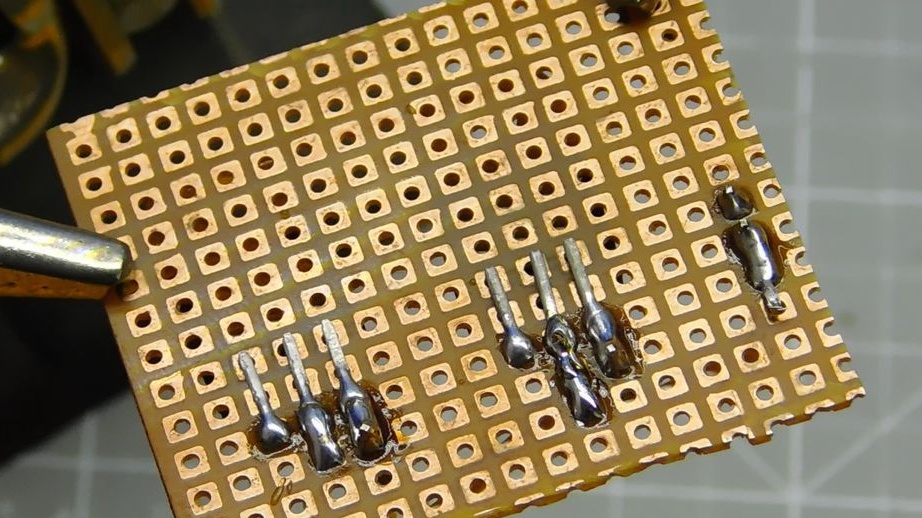
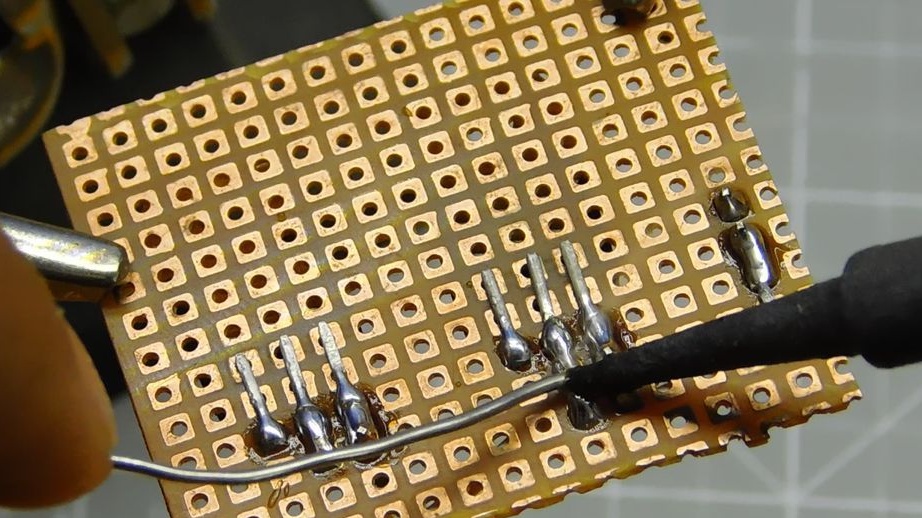
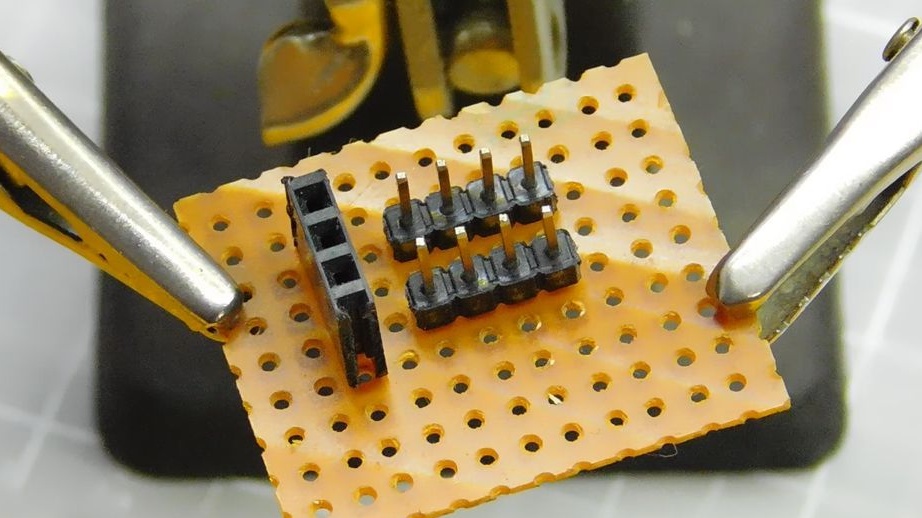
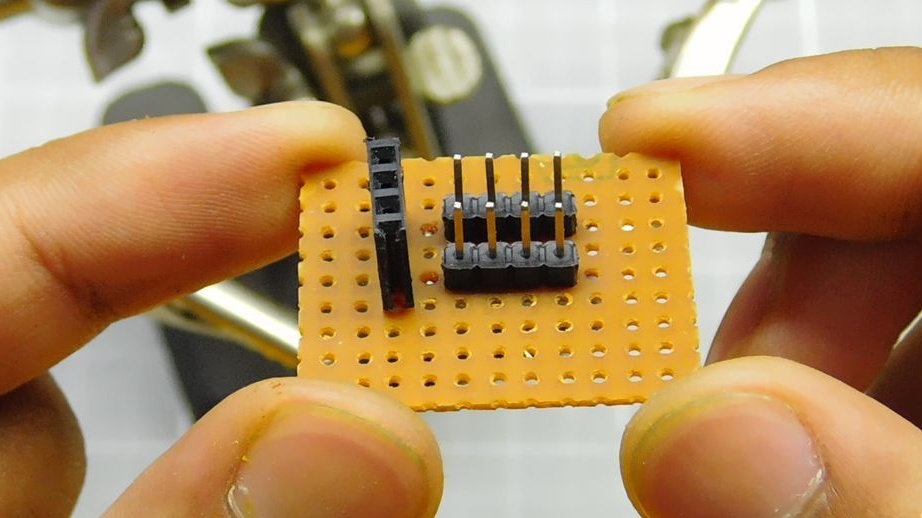
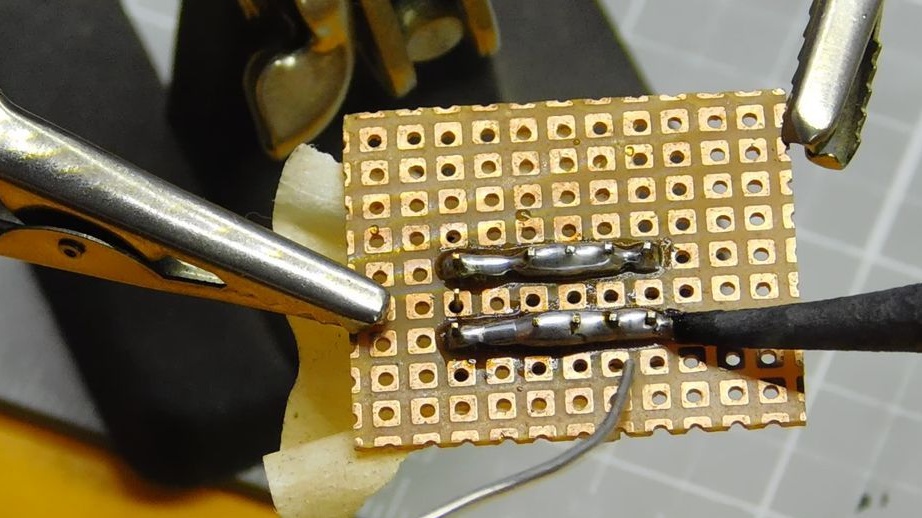
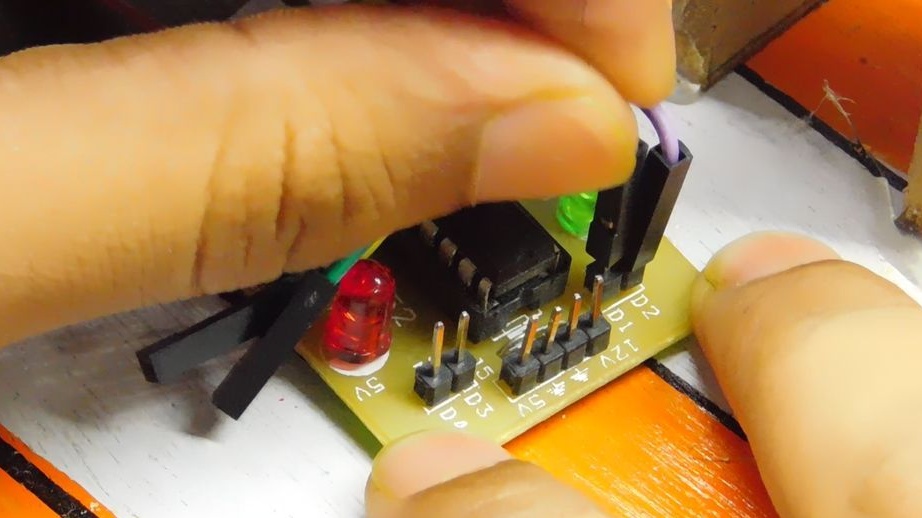
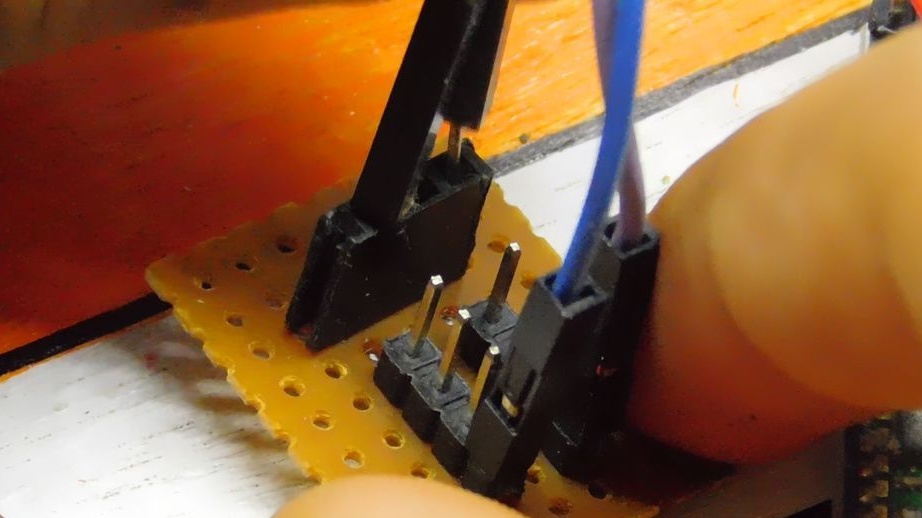
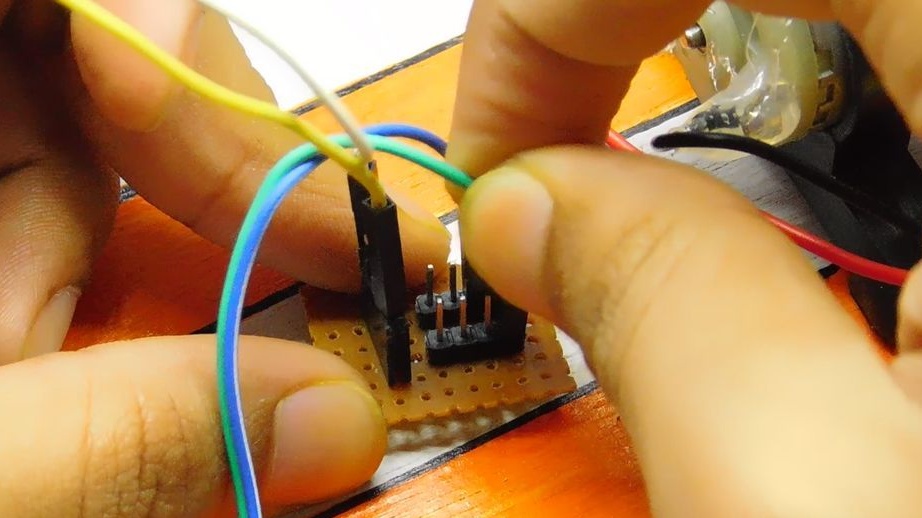
Đối với máy bơm nước và động cơ, cần có nguồn điện 12 V. Nhưng, vì Arduino chỉ phát ra 5 V, nên chủ nhân thu thập mạch trên bóng bán dẫn TIP122.Ngoài ra, trình hướng dẫn thêm một số chân + 5V và Gnd vào bảng mạch.
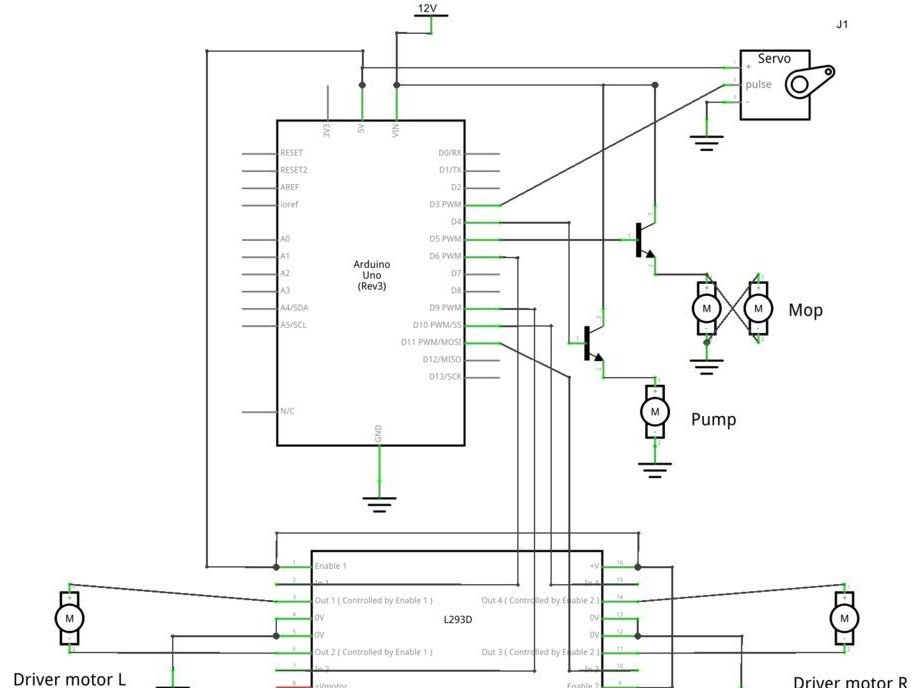
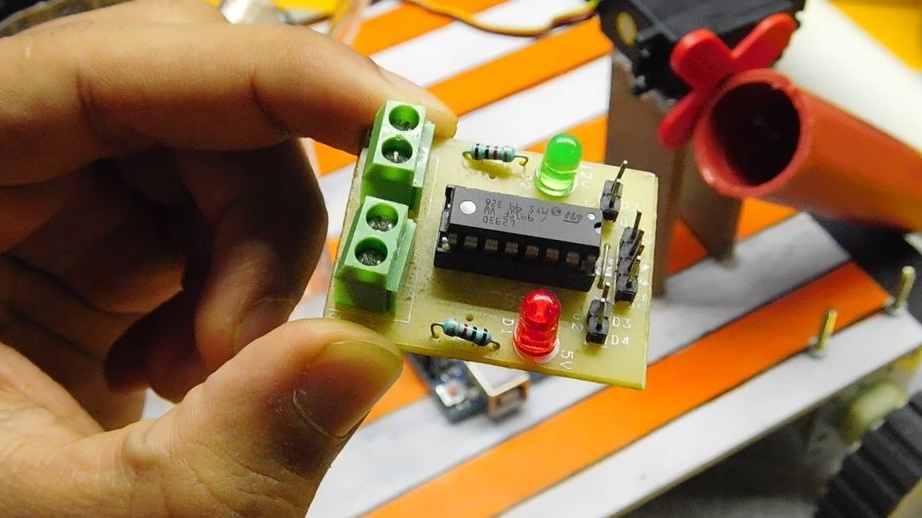
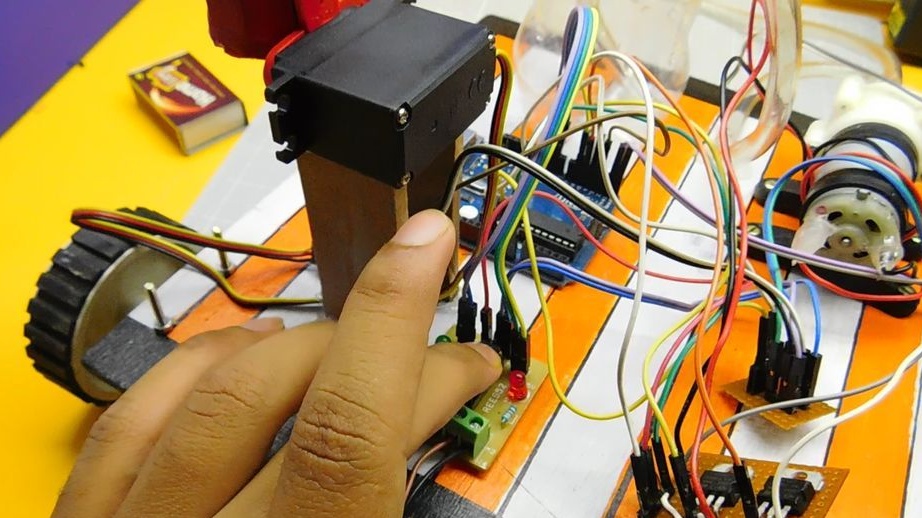
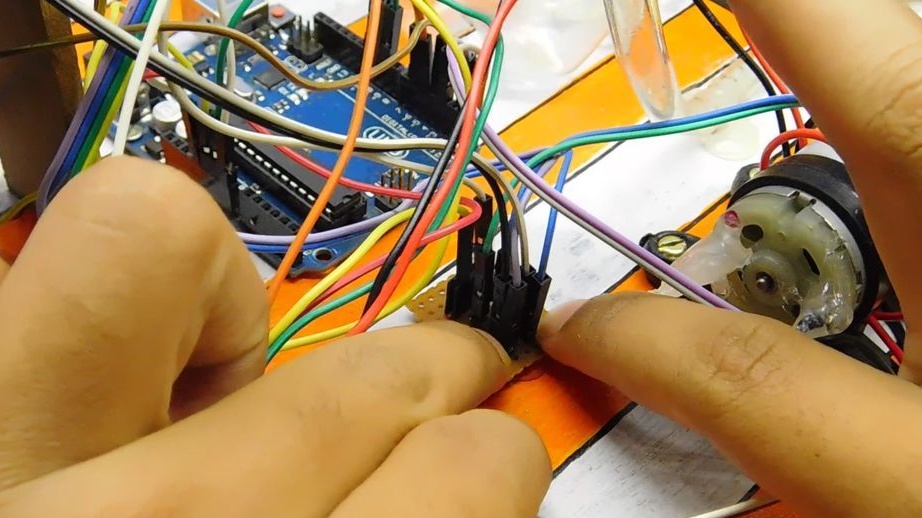
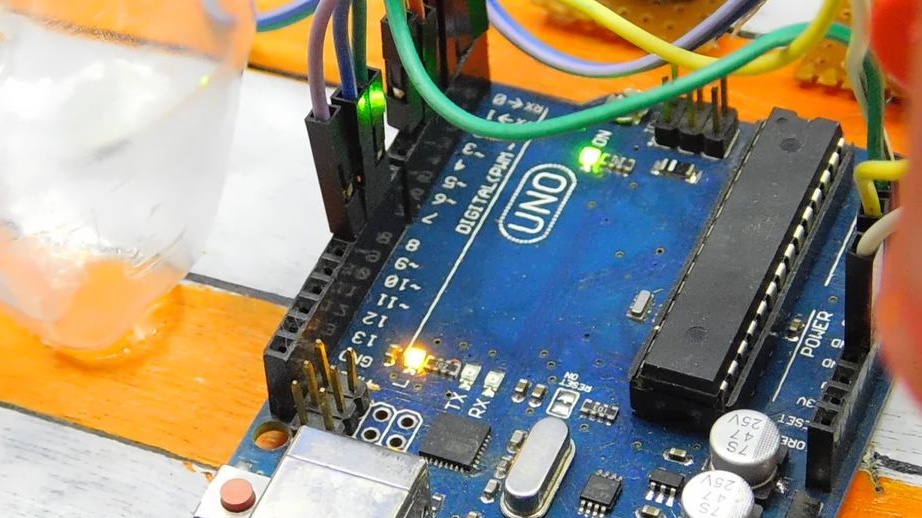
Bước năm: Cài đặt mạch Arduino
Bảo vệ Arduino với nền tảng và kết nối các thiết bị điện với bảng.
Module điều khiển động cơ.
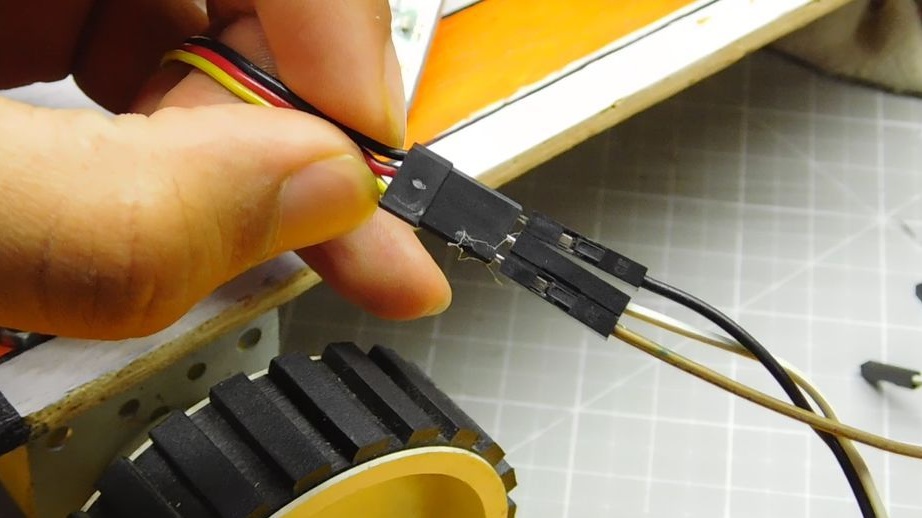
Nó bán cho các động cơ (trên đó các bánh xe được cố định để di chuyển, không phải là bàn chải) dây. Vặn chặt dây trong ổ cắm mô-đun. Tiếp theo, kết nối mô-đun với Arduino như sau.
Mô-đun ::: Arduino
1 - D6
2 - D9
3 - D10
4 - D11
+ 5V - + 5V
Gnd-gnd
+ Mô-đun 12V sẽ được kết nối với pin.
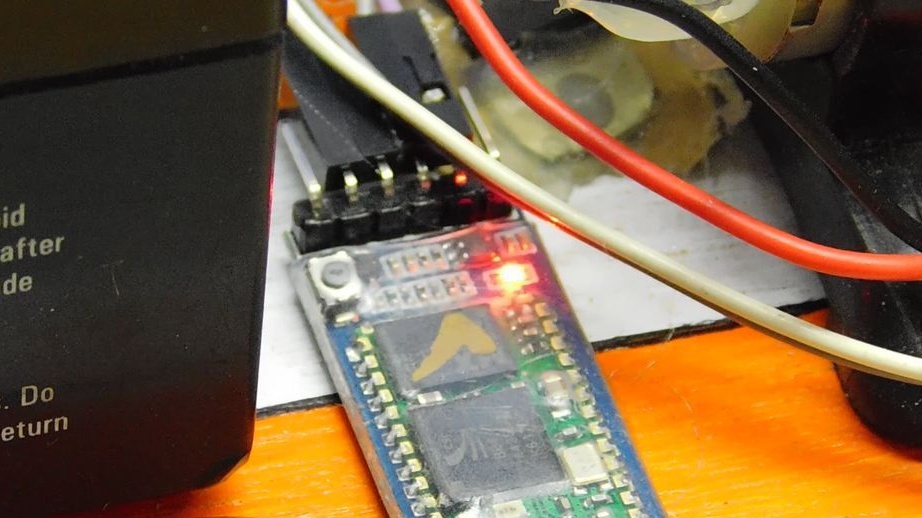
Kết nối Bluetooth.
Bluetooth ::: Arduino
Vcc - + 5V
Gnd - gnd
Rx - Tx
Tx - Rx
Động cơ servo ::: Arduino
Vcc - + 5V
Gnd - gnd
Tín hiệu - D3
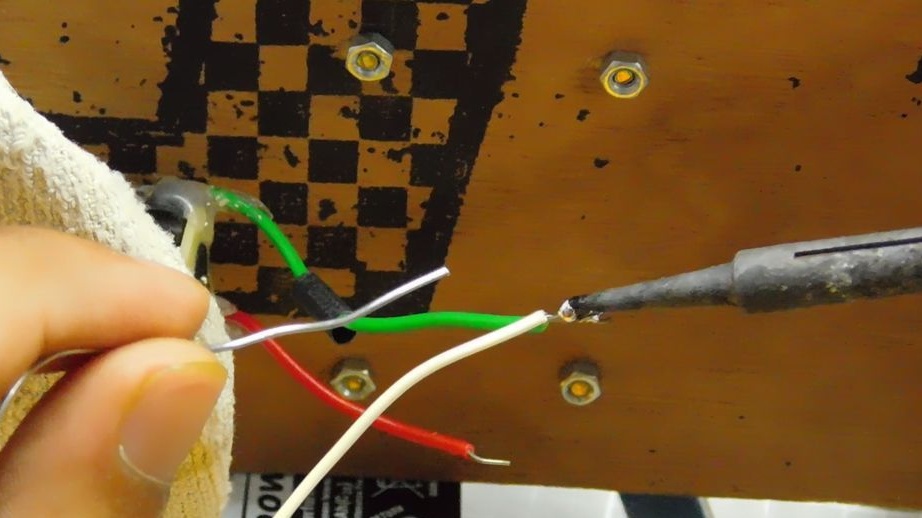
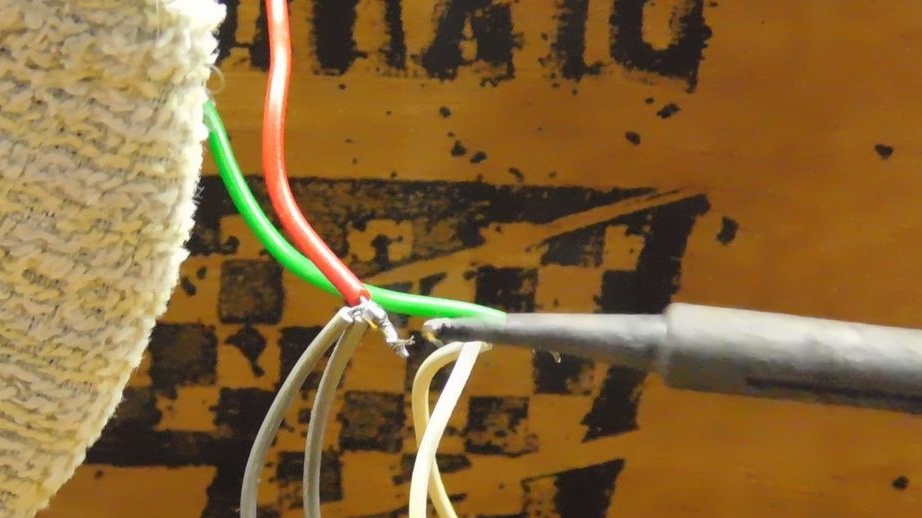
Sau đó, nó kết nối các động cơ bơm và bàn chải theo sơ đồ. Động cơ chổi than được kết nối song song và quay theo các hướng khác nhau, phải theo chiều kim đồng hồ và trái ngược chiều kim đồng hồ.

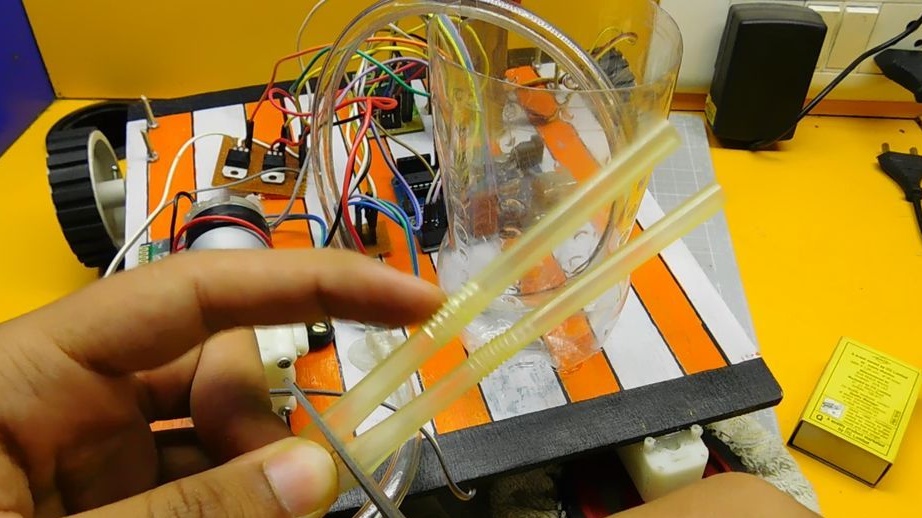
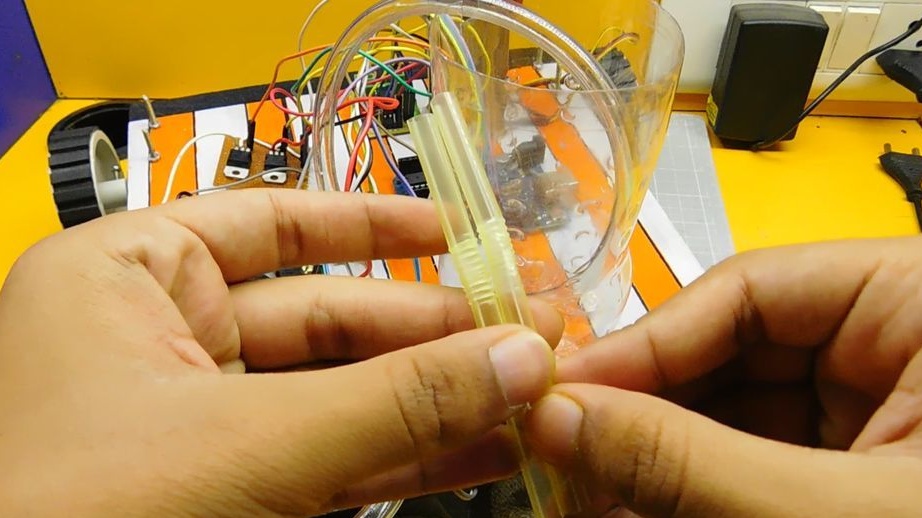
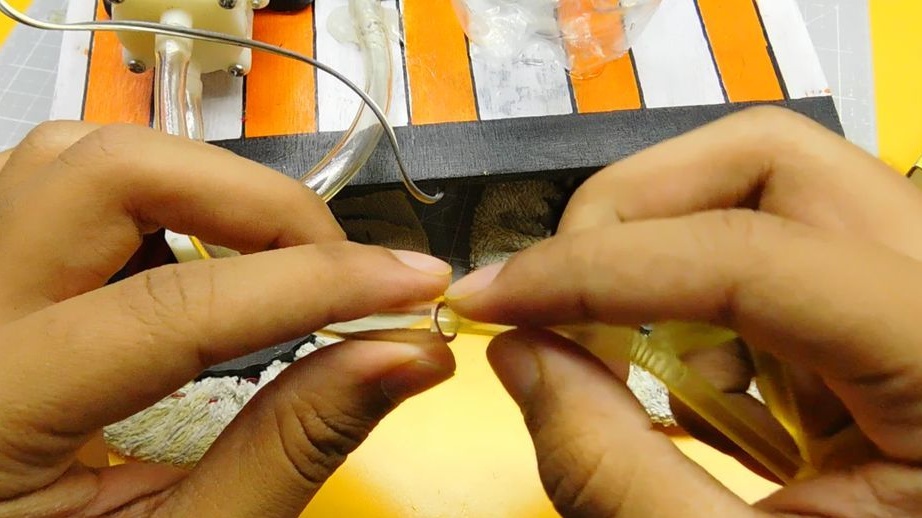
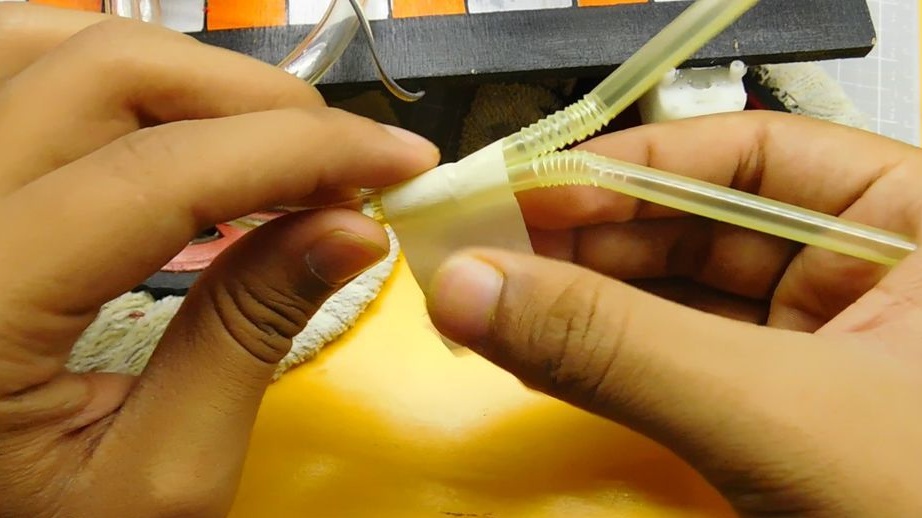
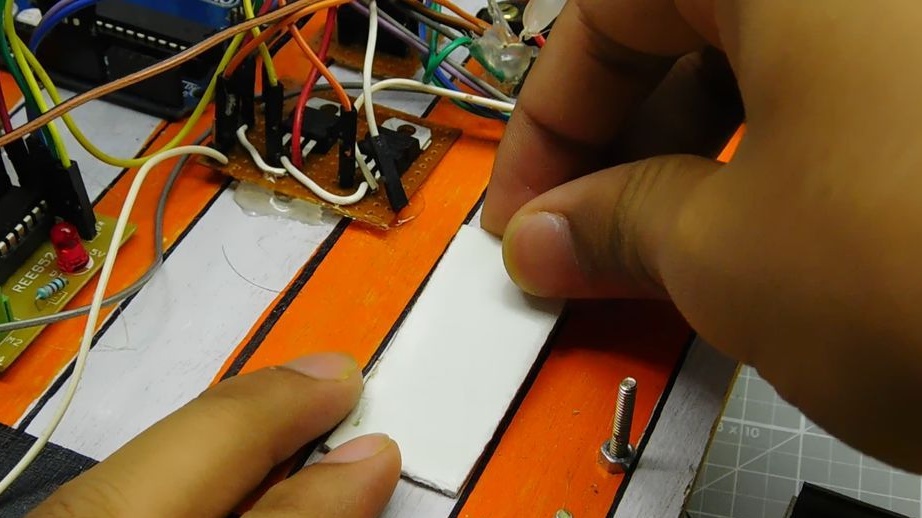
Bước sáu: Chốt phần robot
Lát hai ống hút cocktail khoảng 7 cm mỗi ống. Đặt ống hút vào ống cấp nước. Chốt ống hút trước bàn chải.




Khóa trên nền tảng điện tử linh kiện.

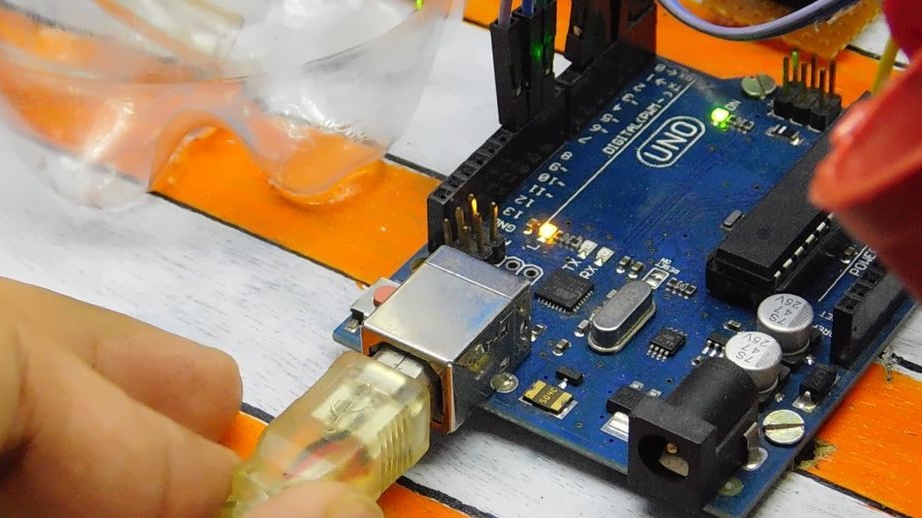
Bước bảy: tải mã
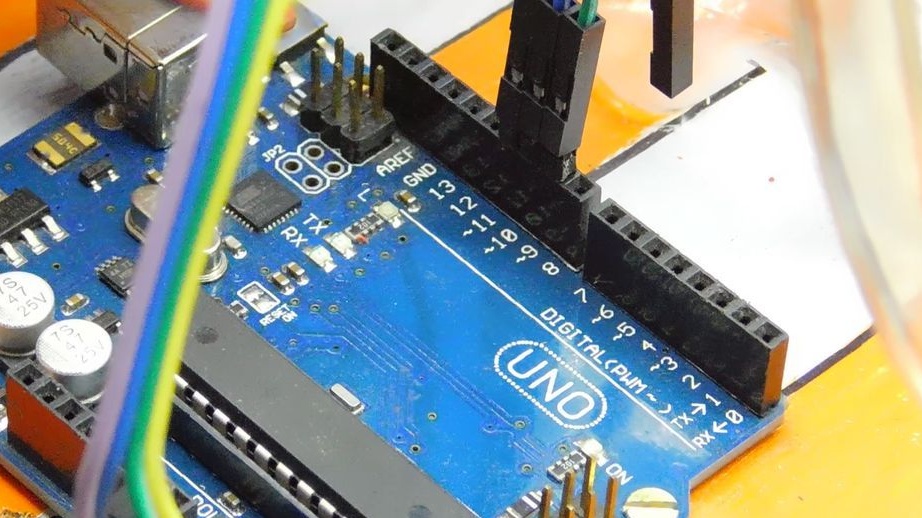
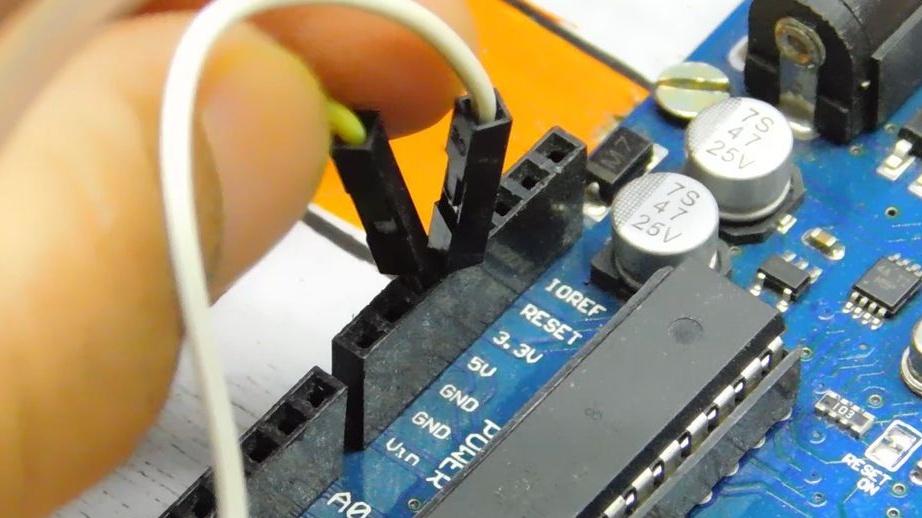
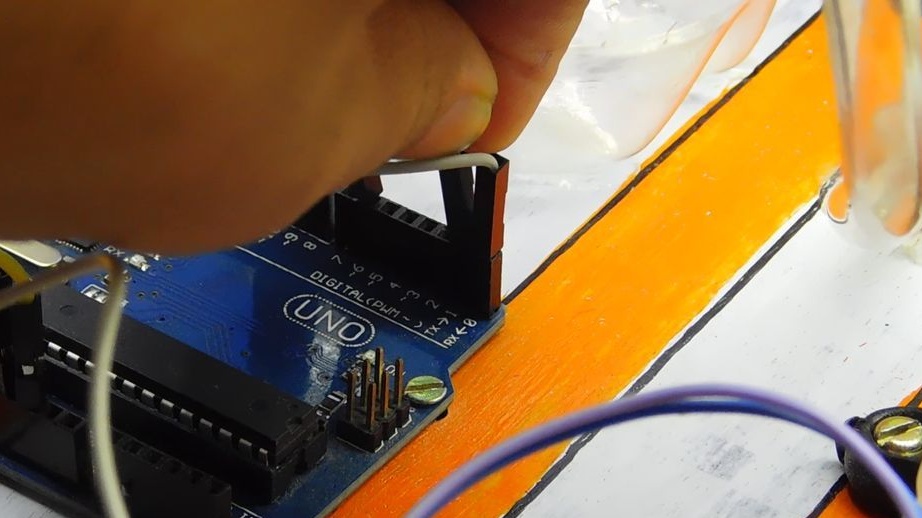
Loại bỏ các jumper Rx và Tx khỏi bảng Arduino. Kết nối bảng với máy tính. Tải mã. Đặt jumper tại chỗ. .
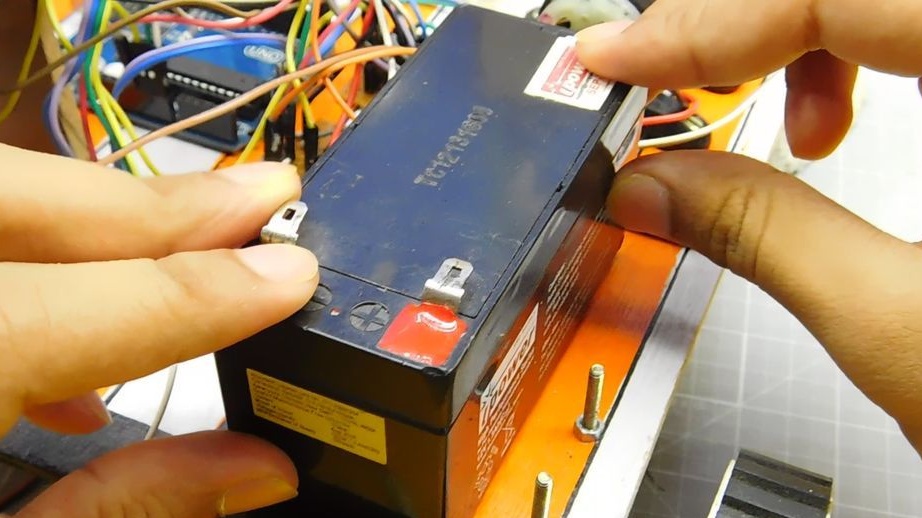
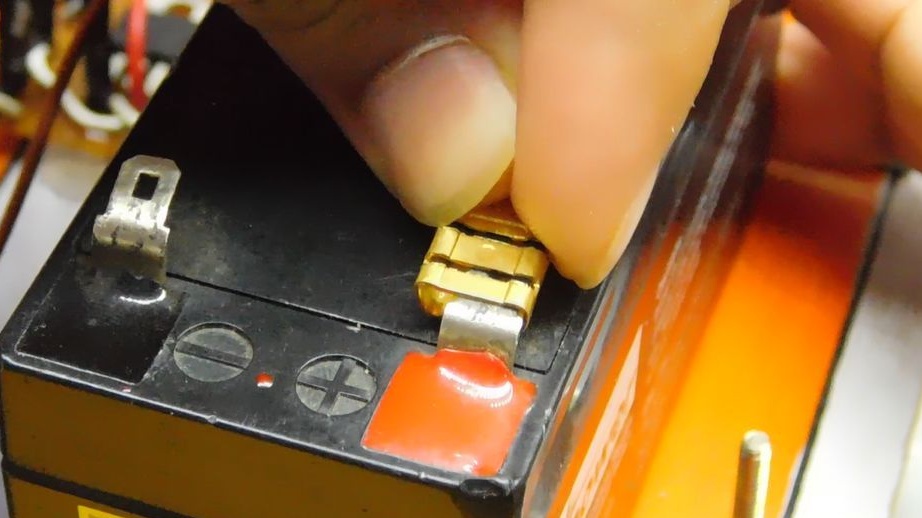
Bước tám: Pin
Bảo vệ, sử dụng băng keo hai mặt, pin trên nền tảng. Kết nối các thiết bị điện tử với pin. Arduino master khuyên nên kết nối thông qua một bộ chia điện áp. Bạn cũng có thể thêm một công tắc vào mạch.

Bước chín: điều khiển robot
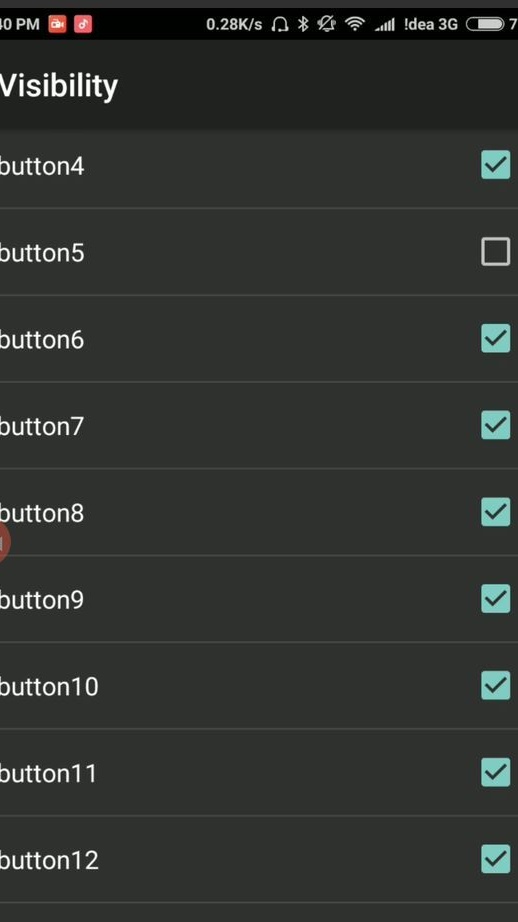
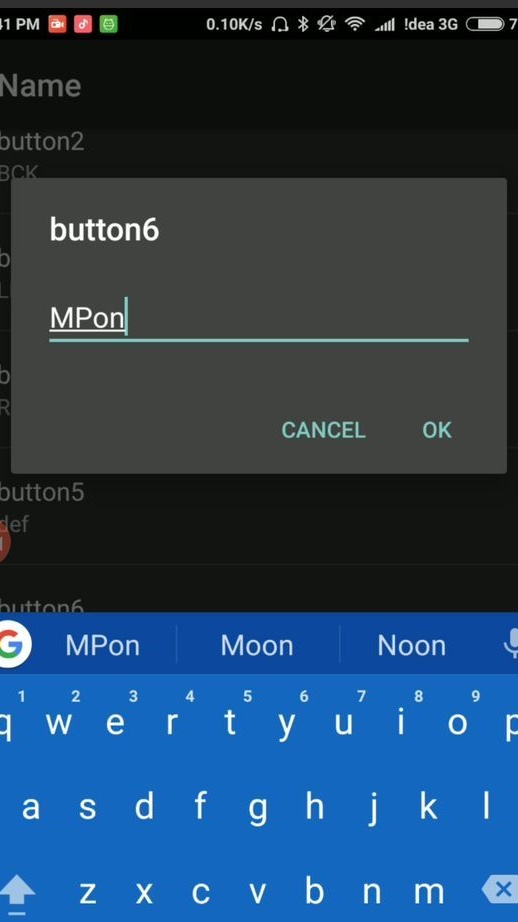
Từ Google Play, trình hướng dẫn tải xuống ứng dụng 'Bộ điều khiển nối tiếp Bluetooth'. Mở ứng dụng. Đi đến cài đặt> khả năng hiển thị. Tắt các nút 5, 9, 12. Chuyển sang tên. Chỉ định một nút gồm 2-3 chữ cái cho mỗi nút. Xem ảnh dưới đây.
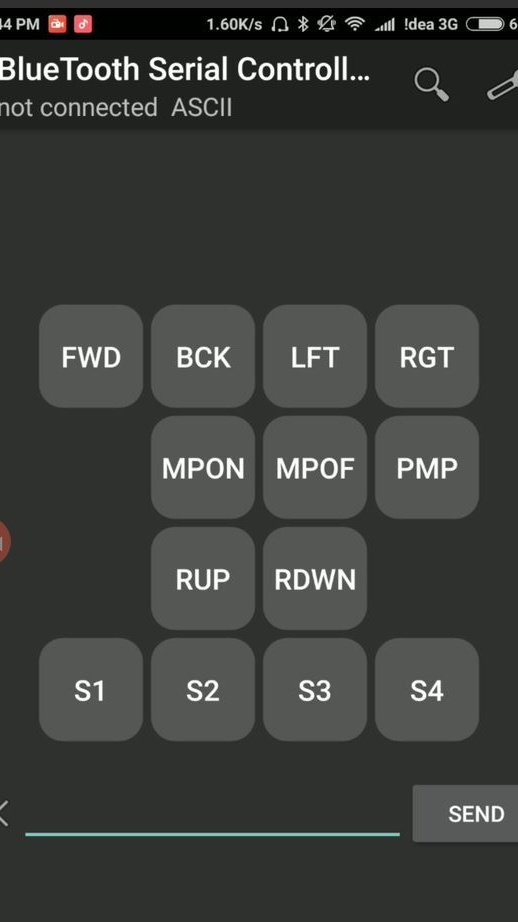
Sau đó, mỗi nút cài đặt một lệnh (dấu ngoặc kép cần được loại bỏ, không thay đổi trường hợp):
Nút 1 (FWD): 'F'
Nút 2 (BCK): 'B'
Nút 3 (LFT): 'L'
Nút 4 (RGT): 'R'
Nút 6 (MPON): 'M'
Nút 7 (MPOF): 'm'
Nút 8 (PMP): 'P'
Nút 10 (RUP): 'U'
Nút 11 (RDWN): 'u'
Nút 13 (S1): '1'
Nút 14 (S2): '2'
Nút 15 (S3): '3'
Nút 16 (S4): '4'
Trong các lệnh dừng> lệnh, chỉ gán các lệnh cho các nút này:
Nút 1: 'S'
Nút 2: 'S'
Nút 3: 'S'
Nút 4: 'S'
Nút 8: 'p'

Bây giờ vẫn còn để kết nối với mô-đun bluetooth ("HC-05"), nhập mật khẩu (1234 hoặc 0000) và bạn có thể thử dọn phòng -)))
Cảm ơn chủ nhân, và chúng tôi mong muốn anh ta cải tiến robot và có được công việc hoàn toàn tự chủ từ nó.
Toàn bộ quá trình lắp ráp của robot dọn dẹp có thể được nhìn thấy trong video.