


Xin chào, tôi muốn chia sẻ hướng dẫn về điện khí hóa mô hình để liên kết theo tỷ lệ 1/35 Tamiya 35163 JGSDF TYPE 61 TANK. Để di chuyển, chúng tôi sẽ sử dụng hộp số kép Tamiya 70097, và làm bộ điều khiển cho chiếc ESP 8266-12E. Điều khiển Wi-Fi bằng vỏ web.
Chúng tôi sẽ cần:
- Tamiya 35163 JGSDF LOẠI 61 TANK (1:35)
- Bộ phụ kiện hộp số hai động cơ Tamiya 70097 Redutcor
- Keo dán mô hình xi măng TAMIYA
- ESP 8266 -12E hoặc ESP 8266 -12F
- AMS 1117 3.3v 800mA - bộ ổn áp
- Trình điều khiển động cơ Qifei L9110
- Tụ 10v 1000uF
- Ngăn mở cho hai pin AAA
- 4 pin AAA hoặc 4 pin AAA 1.2V 1000mA NI-MN
- Điện trở 2 ohm 2 chiếc.
- Điện trở 10 kOhm 6 chiếc.
- Nút
- chuyển đổi
- USB - TTL
- bảng mạch
- hàn sắt
- dây nhiều màu
Bước 1 Nhà ở và cơ khí.
Trước hết, chúng ta cần phải dán mô hình Tamiya 35163. Mở hộp:
Bắt đầu bằng cách đùn chi tiết mô hình. Các phần nhô ra hoặc phần còn lại của khung nên được cắt bằng dao hoặc làm sạch bằng giấy nhám. Chúng tôi lắp ráp phần dưới của cơ thể theo hướng dẫn, bạn không nên chỉ dán các bộ phận để cài đặt các bánh xe ổ đĩa. Tôi chỉ áp dụng những chi tiết này để chụp ảnh:

Ở mặt trái, nó trông như thế này:

Cẩn thận không dán keo gắn bánh xe bằng keo, tất cả các bánh xe nên quay tự do. Sâu bướm ở ngã ba cũng nên được dán lại với nhau. Sau khi lắp ráp khung xe, tốt hơn là để cho nó khô hoàn toàn trước khi hành động tiếp theo:

Trong khi khung xe khô, dán đầu. Đầu tiên, nền tảng. Có nhiều bộ phận nhỏ, tốt hơn là sử dụng nhíp để dán các bộ phận đó. Cơ sở dán:

Chúng tôi thu thập các tháp. Hai tùy chọn có sẵn cho tháp. Sự khác biệt nằm ở chi tiết lắp thùng vào tháp. Tùy chọn đầu tiên là gắn kết tiêu chuẩn, thứ hai với khả năng chống bụi. Nó có giá trị lựa chọn cái nào bạn thích nhất. Sự khác biệt này chỉ được phản ánh trong ngoại hình. Anh ấy dán mô hình vào các ngày lễ năm mới, vì vậy anh ấy cũng mặc quần áo:

Đặt lại với nhau và để khô:

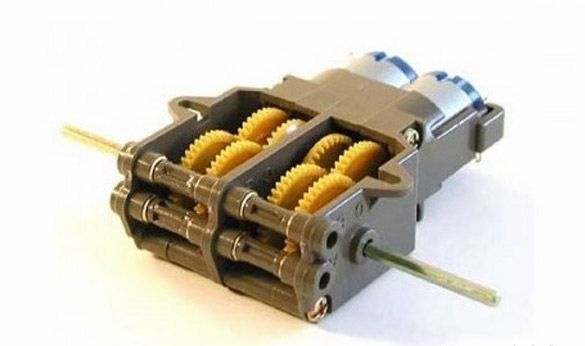
Trong khi mô hình đang khô, hãy chuyển sang lắp ráp động cơ bánh răng. Chúng tôi sẽ sử dụng một động cơ bánh răng và động cơ được sản xuất bởi cùng một công ty với mô hình, cụ thể là Tamiya 70097:
Các hướng dẫn đi kèm với bộ không có ngôn ngữ tiếng Nga, nhưng nó đã có thể hiểu được.Hai tùy chọn lắp ráp được mô tả chi tiết ở đó:
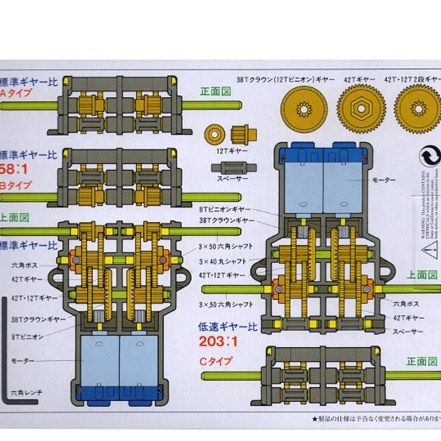
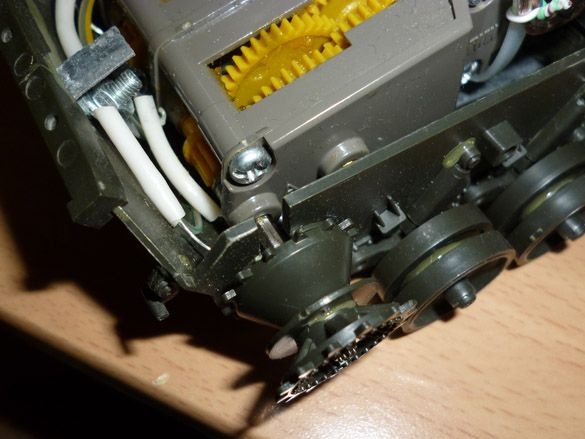
Trong trường hợp đầu tiên, tỷ lệ bánh răng là 58: 1, thứ hai - 203: 1. Chúng tôi sử dụng tùy chọn đầu tiên. Các trục đầu ra của hộp số phải được thông qua các lỗ trung tâm. Mắt bên của hộp số nên được cắt, chúng sẽ can thiệp vào việc cài đặt trên mô hình. Nếu không, hộp số khá đơn giản để đưa vào mô hình. Sau đó, chúng tôi đặt bánh răng nhỏ vào động cơ và chèn chúng vào hộp số. Đối với mỗi động cơ, một điện trở 2 ohms nên được hàn vào một trong các tiếp điểm. Chúng tôi hàn một dây vào điện trở, và dây thứ hai vào tiếp điểm thứ hai của động cơ. Hoàn thành việc cài đặt các động cơ, chúng tôi đưa động cơ bánh răng lắp ráp vào mô hình. Chốt bằng keo.
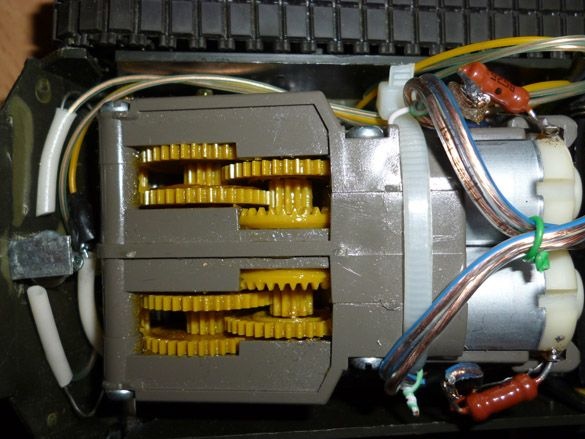
Chúng tôi cũng lái các bánh xe lái đến các trục đầu ra.
Các kế hoạch trong tương lai bao gồm thêm chức năng xoay tháp pháo và có thể là bắn vũ khí. Trong các hướng dẫn sau đây tôi sẽ cố gắng mô tả các sửa đổi này.
Bước 2 Điện khí hóa.
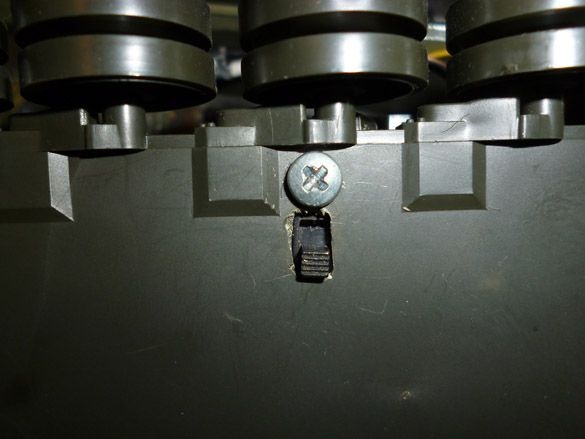
Đã thu thập mô hình và chờ sấy khô hoàn toàn, hãy đi đến e nhồi. Ở phần dưới chúng ta cắt trong công tắc:
Hai ngăn pin được hàn nối tiếp và dán lại với nhau. Chúng tôi cũng xuất ra một đầu nối thuận tiện ở cuối dây.

Để cung cấp năng lượng cho mô hình, bạn có thể sử dụng pin AAA (pin nhỏ một chút) hoặc pin AAA Ni-Mn 1.2 volt.
Lấy chiếc ESP8266. Đây là một mô-đun nhỏ nhưng khá chức năng và mô-đun Wi-Fi tích hợp cung cấp kết nối với nhà Mạng Wi-fi. Tôi khuyên bạn nên chọn một mô-đun với 4 Mb bộ nhớ. Để chạy và flash ESP-8266 ESP, bạn phải lắp ráp một ràng buộc tối thiểu. Các mô-đun được cung cấp bởi 3,3 volt. Nó không thể được kết nối trực tiếp với một nguồn năng lượng không ổn định. Do đó, chúng tôi bao gồm trong mạch một bộ ổn áp AMS 1117 3.3v. Kết nối trực tiếp chân VCC với cáp nguồn dương từ bộ ổn định và các chân còn lại: CH_PD, RESET, GPIO0, GPIO2, phải được kết nối thông qua một điện trở, nghĩa là được kéo đến nguồn điện (VCC). Nên sử dụng điện trở 10kOm, nhưng chúng có thể được thay thế bằng các điện trở khác từ 4,7kOm đến 50kOm. Không thể chỉ thay đổi điện trở GPIO15, mệnh giá của nó phải lên tới 10k. Trực tiếp, chúng tôi chỉ kết nối GND với dây nguồn âm (GND). Để vào chế độ phần sụn mô-đun, GPIO0 phải được kết nối với GND. Nút cần thiết để khởi động lại mô-đun khi nó được flash. Các kết luận của Tx, Rx, GND được đưa ra trong đầu nối USB-TTL. Kết nối USB-TTL như sau:
ESP 8266 - USB-TTL
Tx - Rx
Rx - Tx
GND - GND
Đề án như sau:

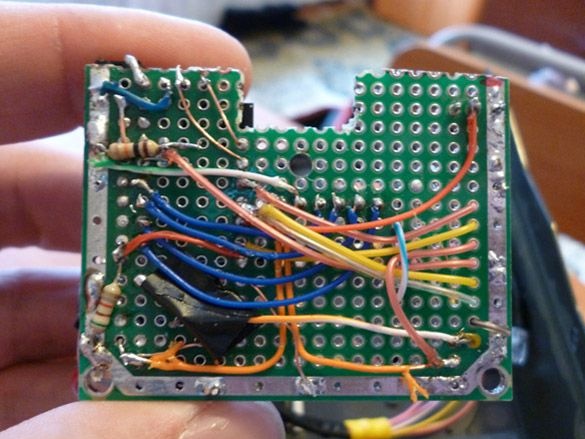
Nó thuận tiện nhất để đặt tất cả lên một bảng mạch nhỏ:
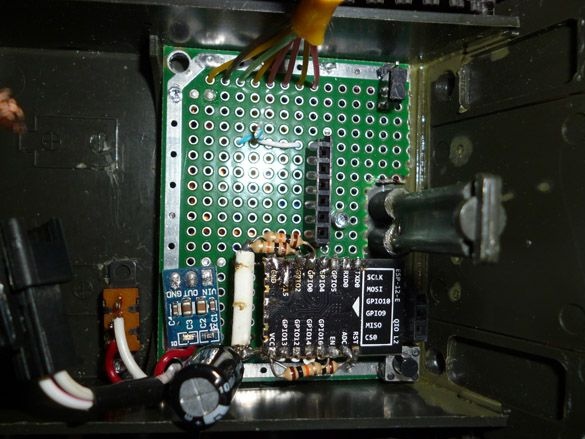
Chúng tôi sửa bảng mạch ở phía sau của xe tăng:
Khoang pin được đặt giữa động cơ bánh răng và bảng mạch:

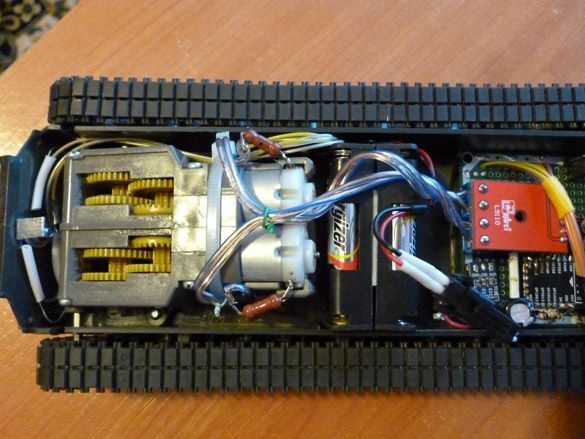
Tất cả các điện được lắp ráp và lắp đặt được đặt ở phần dưới của bể:
Bước 3 Phần mềm.
Để chỉnh sửa và điền vào bản phác thảo trong ESP, bạn cần tải xuống Arduino IDE từ trang web chính thức
Arduino.cc.
Sau đó cài đặt Arduino IDE. Sau đó, chúng tôi tiến hành cài đặt tiện ích bổ sung cho ESP. Chúng tôi làm điều này thông qua người quản lý bảng. Đầu tiên, khởi động Arduino IDE, sau đó Tệp - Cài đặt - trong trường URL Trình quản lý bảng bổ sung, chèn liên kết:
http://arduino.esp8266.com/package_esp8266com_index.jsonnhấn OK (bạn có thể nhập một số liên kết được phân tách bằng dấu phẩy trong trường này). Sau đó, đi đến Công cụ - Bảng - Trình quản lý bảng trong trường bộ lọc, nhập Esp8266 và chọn ESP8266 theo Diễn đàn cộng đồng ESP8266. Nhấp vào Cài đặt và đợi quá trình tải xuống hoàn tất. Bây giờ chúng tôi chọn từ menu Công cụ - Bảng - Chung ESP8266, chúng tôi đặt tần số của mô-đun 80 hoặc 160Mhz của bạn, kích thước của bộ nhớ flash. Sau đó chọn cổng nối tiếp mà bộ chuyển đổi USB-TTL được kết nối.
Bây giờ bạn cần cài đặt công cụ để truy cập hệ thống tệp ESP. Để làm điều này, di chuyển các tệp trong kho lưu trữ vào thư mục công cụ, có thể được tìm thấy trong thư mục gốc của Arduino IDE.
Bước 4 Phác thảo
Bây giờ môi trường lập trình đã sẵn sàng, hãy chuyển sang chỉnh sửa bản phác thảo. Mở bản phác thảo:
Lúc đầu, chúng tôi đang tìm kiếm trường "String _ssid =" ";". Giữa các dấu ngoặc kép, cho biết điểm truy cập nào bạn muốn kết nối.
Trường "Chuỗi _password =" ";" - được sử dụng để ghi lại mật khẩu cho mạng này.
Nếu ESP không thể kết nối với mạng được chỉ định trong các dòng trước đó, bộ điều khiển sẽ tạo một mạng mà nó có thể kết nối.
Trường "Chuỗi _ssidAP =" ";" - cho biết tên của mạng được tạo.
Trường "Chuỗi _passwordAP =" 12345678 ";" - đặt mật khẩu của mạng đã tạo.
Trường "Chuỗi SSDP_Name =" ESP_Wi-Fi ";" - đặt tên của SSDP.
Sau khi chỉnh sửa tất cả các dòng trên, bạn cần tải vỏ web lên ESP 8266. Chúng tôi kết nối ESP 8266 qua USB-TTL với máy tính theo sơ đồ trên. Trong Arduino IDE, chọn Công cụ - Tải lên dữ liệu phác thảo ESP8266. Chúng tôi đang chờ kết thúc quá trình tải lên tập tin. Bây giờ bạn có thể ghi lại bản phác thảo. Đầu tiên, đặt ESP8266 vào chế độ phần sụn. Để làm điều này, kết nối GPIO0 với GND. Nhấn nút điền phác thảo, rồi nhấn nút đặt lại trên mô-đun EPS. Chờ bản phác thảo hoàn tất.
Tôi sẽ giải thích một chút về thuật toán của ESP 8266. Khi khởi động, EPS cố gắng kết nối với mạng Wi-Fi được chỉ định trong trường String _ssid. Nếu vì lý do nào đó, điều này không thành công, ESP sẽ tăng mạng của nó với tên được chỉ định trong trường ssidAP. Trong trường hợp đầu tiên, bạn có thể điều khiển xe tăng thông qua bất kỳ thiết bị nào được kết nối với cùng một mạng. Trong trường hợp thứ hai, bạn cần kết nối với ESP thông qua bất kỳ thiết bị, máy tính bảng, điện thoại hoặc máy tính nào. Tiếp theo, trong trình duyệt của thiết bị mà chúng tôi sẽ điều khiển xe tăng, bạn cần nhập địa chỉ IP của xe tăng. Bạn có thể tìm ra địa chỉ IP bằng cách kết nối ESP với máy tính, sau đó mở cửa sổ terminal và khởi động lại ESP. Khi được khởi chạy, địa chỉ IP của xe tăng sẽ được ghi trong cửa sổ đầu cuối. Hoặc bạn có thể chỉ định một địa chỉ IP cố định được chỉ định bởi ESP trong cài đặt của bộ định tuyến Wi-Fi. Ngoài ra, nếu bạn sử dụng máy tính với Windows, bạn có thể truy cập vào cơ sở hạ tầng mạng, tìm xe tăng của chúng tôi ở đó và nhấp đúp vào nó để kết nối. Nếu bản thân ESP tăng điểm truy cập, địa chỉ IP tank tank sẽ là 192.168.1.1.
Giao diện web được viết bằng HTML và bao gồm hai trang. Cái đầu tiên chứa các lệnh điều khiển. Vào lần thứ hai, bạn có thể thay đổi cài đặt của ESP 8266. Trên trang cài đặt, các tham số sau có sẵn để thay đổi: tên của điểm truy cập mà bạn muốn kết nối, mật khẩu của điểm truy cập này, tên của bể, tên của mạng được tạo và mật khẩu để kết nối với mạng này. Tất cả các thay đổi sẽ có hiệu lực chỉ sau khi khởi động lại. Tính năng tải lại ESP cũng có sẵn từ giao diện web.
Sau khi hoàn thành tất cả các công việc, xe tăng có thể được sơn bằng sơn mô hình. Bể sơn trông đẹp hơn:

Tôi không đủ kiên nhẫn cho một công việc như vậy. Do đó, các mô hình của tôi được để lại mà không vẽ:

