


Chào buổi chiều, hôm nay tôi muốn chia sẻ hướng dẫn làm xe tăng. Sẽ có hai tùy chọn cho bộ điều khiển bên trong: ESP -8266 và Arduino Chuyên nghiệp Mini. Trong phiên bản đầu tiên, việc điều khiển được thực hiện thông qua liên lạc Wi-Fi. Trong thứ hai - IR từ xa. Được chế tạo trên cơ sở TAMIYA 35162 Schutzenpanzer Marder 1A2 (1:35), nó được điều khiển bởi Bộ hộp số hai động cơ Tamiya 70097 và các động cơ đi kèm với hộp số.
Chúng tôi sẽ cần:
- TAMIYA 35162 Schutzenpanzer Marder 1A2 (1:35)
- keo mô hình (ví dụ Xi măng TAMIYA)
- Bộ hộp số hai động cơ Tamiya 70097
- ESP 8266 -12E hoặc Arduino Pro Mini 8 MHz 3.3V
- bộ ổn áp AMS 1117 3.3v 8000mA (nếu tùy chọn với ESP 8266-12E)
- Trình điều khiển động cơ Qifei L9110
- tụ 10v 1000uF
- Đèn LED hai màu (đỏ, xanh)
- đèn LED màu xanh
- 2 đèn LED màu đỏ
- Máy thu hồng ngoại
- quang điện trở
- 2 ngăn chứa 2 pin AAA hoặc 4 pin AAA 1.2V 1000mA NI-MN
- 2 điện trở 2ohm
- 4 điện trở 75 ohms
- 6 điện trở 10 kOhm (nếu tùy chọn với ESP 8266-12E)
- nút
- quang điện trở
- USB - TTL
- hàn sắt
- dây nhiều màu
Bước 1 Nhà ở và cơ khí.
Đầu tiên bạn cần thu thập mô hình TAMIYA 35162 Schutzenpanzer Marder 1A2 (1:35). Chúng tôi dán phần dưới theo hướng dẫn, ngoại trừ các bộ phận che các lỗ thoát cho trục của hộp số. Những ngôi sao hàng đầu cũng không dính vào. Dán keo phần trên theo hướng dẫn mà không thay đổi. Sau khi dán tất cả, để khô và tiến hành thu thập hộp số. Như có thể thấy từ hướng dẫn Tamiya 70097 có thể được lắp ráp thành hai phiên bản khác nhau.
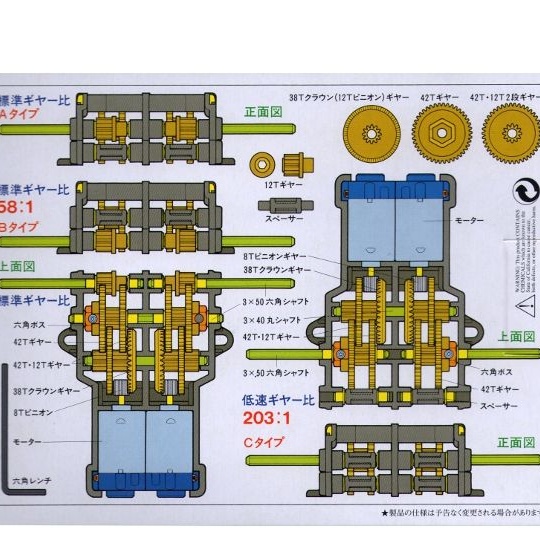
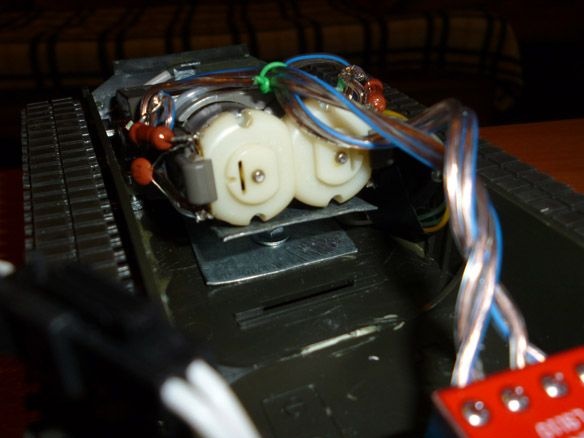
Tùy chọn đầu tiên với tỷ lệ bánh răng là 58: 1, thứ hai - 203: 1. Chúng ta cần tùy chọn đầu tiên. Và ở đây, cũng không đơn giản như vậy. Trong trường hợp này, đầu ra trục có thể ở gần đáy hộp số hoặc ở giữa. Các trục phải được thở ra vào lỗ giữa! Sau khi lắp ráp hộp số, chúng tôi tiến hành cài đặt nó trên mô hình. Về lý thuyết, mọi thứ nên đơn giản, bởi vì cả mô hình và hộp số của một hãng. Trong thực tế - hộp số phải được đẩy ở đó. Ở vị trí nằm ngang của hộp số, trục của bánh xe bị phồng lên, vì vậy tôi phải cắt một tấm kim loại, để có thể cố định hộp số ở vị trí mong muốn.

Các trục hộp số sẽ phải được cắt thêm 3 mm. Sau đó dán các bánh xe vào chúng.

Ở phần trên gần phía sau, chúng tôi tạo lỗ cho đèn LED hai màu và bộ thu hồng ngoại.

Gần phía trước là một lỗ cho đèn LED màu xanh sẽ dùng làm đèn pin.

Và bên trong cửa sập - cho một quang điện trở.

Ở phía ngược lại, dán đèn LED màu đỏ để chiếu sáng.

Để tất cả các bên trên, bạn cần hàn các dây. Nó là thuận tiện hơn để làm điều này trước khi cài đặt.
Bước 2 Thợ điện
Ở đây tôi sẽ cung cấp một sự lựa chọn của các tùy chọn để lắp ráp thêm.
Nếu bạn đã chọn ESP 8266. Mô-đun Wi-Fi tích hợp hỗ trợ rất nhiều cho quá trình điều khiển và kết nối.Nó có thể dễ dàng được lập trình trong Arduino IDE. Tốt nhất là chọn một mô-đun có bộ nhớ 4 Mb. Trong trường hợp này, cần phải thu thập dây nịt tối thiểu để bắt đầu và flash ESP-8266. Chỉ có chân VCC được kết nối trực tiếp với nguồn điện, các chân còn lại: CH_PD, RESET, GPIO0, GPIO2, phải được kéo vào nguồn điện (VCC) thông qua một điện trở. Các điện trở 10kOm có thể được thay thế bằng các điện trở khác, từ 4,7kOm đến 50kOm, ngoại trừ GPIO15 - giá trị của nó phải lên tới 10k. Trực tiếp, trừ đi (GND) của nguồn điện, chúng tôi chỉ kết nối GND và chúng tôi cũng kéo GPIOO qua điện trở đến 10kOm, để đưa mô-đun vào chế độ tải xuống phần sụn, đến GND. Nút cần thiết để khởi động lại và flash mô-đun. Đầu nối USB-TTL - cho phần sụn.
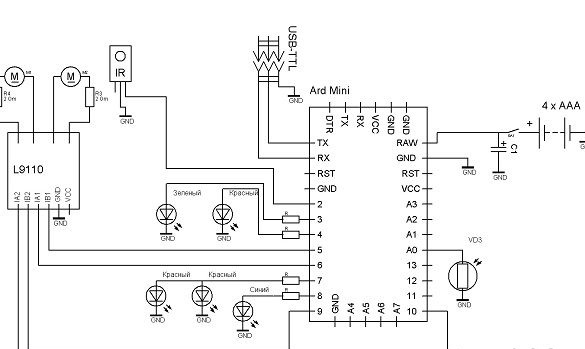
Đây là một sơ đồ
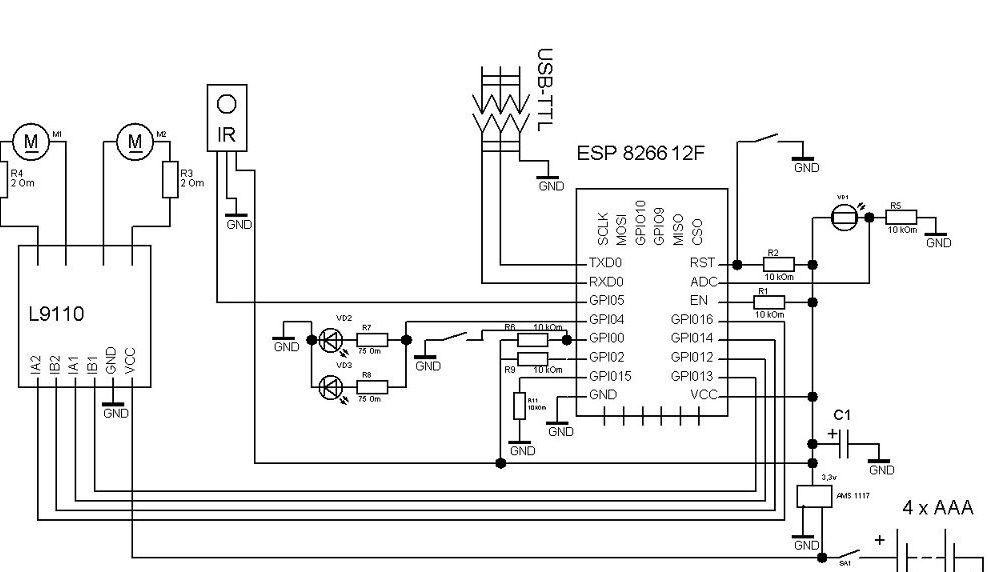
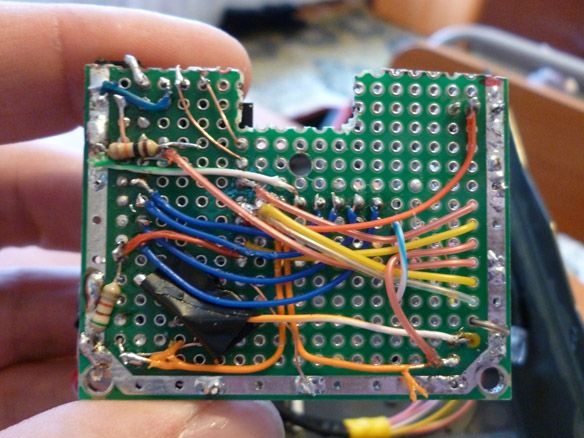
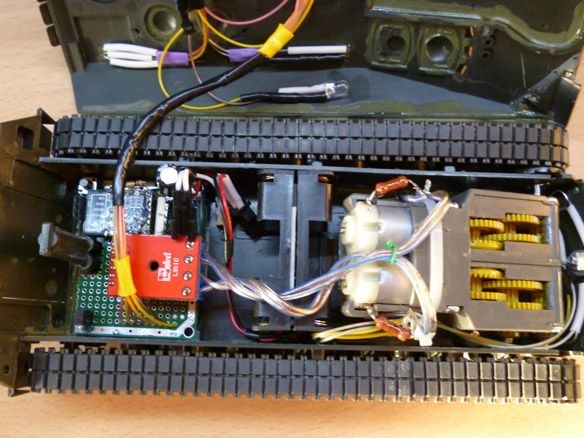
Tôi sẽ giải thích một chút, đèn LED màu xanh và hai màu đỏ là cần thiết cho đèn nền (nó có thể nhìn thấy và đẹp trong bóng tối), bộ phát quang được kết nối với ADC của bộ điều khiển và cần thiết để xác định ánh sáng (khi đèn nền chuyển sang màu tối). Điện trở kéo lên 10 kOhm, 75 Ohm cho đèn LED, giới hạn dòng 2 Ohm cho động cơ (không có chúng, khi cố gắng di chuyển, bộ điều khiển bị quá tải). Chúng tôi hàn mọi thứ theo mạch trên bảng mạch. Để cung cấp năng lượng, bạn có thể sử dụng 4 pin "nhỏ" hoặc bốn pin cỡ AAA, được hàn nối tiếp. Chúng tôi dán hai ngăn của hai pin bằng băng keo hai mặt và kết nối thành chuỗi. Cả hai ngăn chứa pin và ắc quy được đặt giữa hộp số và bảng mạch.

Nếu sự lựa chọn của bạn rơi vào Arduino. Chỉ có Arduino Pro MINI phù hợp bên trong. Nó đáng để chọn một bảng 3,3 volt, vì các động cơ được thiết kế cho 3 volt, và bạn không muốn cung cấp năng lượng riêng cho các động cơ và Arduino. Arduino dễ dàng hơn. Toàn bộ bộ điều khiển khai thác và bộ điều chỉnh điện áp đã có sẵn trên bo mạch. Nó vẫn còn để hàn ổ cắm Arduino và trình điều khiển động cơ trên bảng mạch.

Bước 3 Chuẩn bị môi trường lập trình.
Để chỉnh sửa phần sụn và điền vào bản phác thảo trong ESP, bạn cần cài đặt Arduino IDE từ trang web chính thức của Arduino.cc, cũng như cài đặt phần bổ trợ cho ESP, thông qua Trình quản lý bảng. Để thực hiện việc này, hãy khởi động Arduino IDE, sau đó chọn Tệp - Cài đặt - trong trường URL Trình quản lý bảng bổ sung, chèn liên kết
http://arduino.esp8266.com/package_esp8266com_index.jsonnhấn OK (bạn có thể nhập một số liên kết được phân tách bằng dấu phẩy trong trường này). Công cụ tiếp theo - Bảng - Trình quản lý bảng, nhập Esp8266 vào trường bộ lọc và nhấp vào ESP8266 bởi Diễn đàn cộng đồng ESP8266. Nhấp vào Cài đặt và đợi quá trình tải xuống hoàn tất. Bây giờ vẫn còn chọn Board - Generic ESP8266 trong menu Công cụ và đặt tần số của mô-đun của bạn thành 80 hoặc 160Mhz, kích thước bộ nhớ flash và chọn cổng nối tiếp mà bộ chuyển đổi USB-TTL được kết nối.
Đối với Arduino, chỉ cần cài đặt Arduino IDE từ trang web chính thức của Arduino.cc.
Bước 4 Firmware
Nó vẫn còn để chỉnh sửa bản phác thảo và điền nó với ESP.
Trong trường "Chuỗi _ssid =" ";" giữa các trích dẫn cho biết điểm truy cập nào bạn muốn kết nối.
"Chuỗi _password =" ";" là mật khẩu cho mạng này.
"Chuỗi _ssidAP =" Mardella ";" tên của mạng mà ESP sẽ tăng nếu nó không kết nối với mạng hiện có.
"Chuỗi _passwordAP =" 12345678 ";" - mật khẩu của mạng mà ESP sẽ tăng nếu nó không kết nối với mạng hiện có.
"Chuỗi SSDP_Name =" Mardella ";" Tên SSDP
Sau khi bắt đầu, ESP cố gắng kết nối với điểm truy cập được chỉ định trong bản phác thảo, nếu thành công, bạn cần xác định địa chỉ IP của robot của chúng tôi và kết nối với địa chỉ này thông qua trình duyệt. Bạn cũng có thể đi qua một máy tính đến cơ sở hạ tầng mạng, tìm bể của chúng tôi ở đó và nhấp đúp để kết nối với nó. Nếu kết nối không thành công, ESP sẽ trở thành điểm truy cập. Sau đó, có thể truy cập bằng cách kết nối với một điểm truy cập mới và nhập 192.168.1.1 trong trình duyệt.
Giao diện web bao gồm hai trang. Người đầu tiên kiểm soát. Thứ hai là để tùy biến. Trên trang thứ hai, bạn có thể chỉ định điểm truy cập mà bạn muốn kết nối, cũng như tên của xe tăng và tên và mật khẩu của điểm truy cập mà ESP tăng. Tất cả các thay đổi có hiệu lực sau khi khởi động lại. Bạn cũng có thể khởi động lại mô-đun thông qua giao diện web.
Đối với Arduino, bạn cần chỉnh sửa tất cả các trường results.value. Đã viết mã IR của giao diện điều khiển mà bạn sẽ sử dụng ở đó.

Video tanchika: