

Cuộn dây đàn guitar là khác nhau. Kiếm được ít lượt hơn - độ méo là nhỏ, nhưng có thể cần một preamp. Tua lại nhiều hơn - biên độ sẽ tăng rất nhiều mà bạn có thể làm mà không cần preamp, nhưng độ méo sẽ tăng. Chọn một chiếc bán tải tùy thuộc vào loại đàn guitar điện nào bạn muốn biểu diễn. Và để hướng dẫn tự động hóa để cuộn dây đón tự làmđược phát minh bởi Instructables dưới biệt danh TheBigSuleskey.
Thiết bị được thiết kế để sử dụng các khung làm sẵn, nhưng có thể được làm lại để hoạt động với bất kỳ thiết bị nào khác, kể cả in 3D. Dây quấn được quấn với một cuộn dây cố định trên bàn, đi qua một vòng và một hướng dẫn dọc có nhiều lỗ, sau đó quấn quanh một khung xoay:

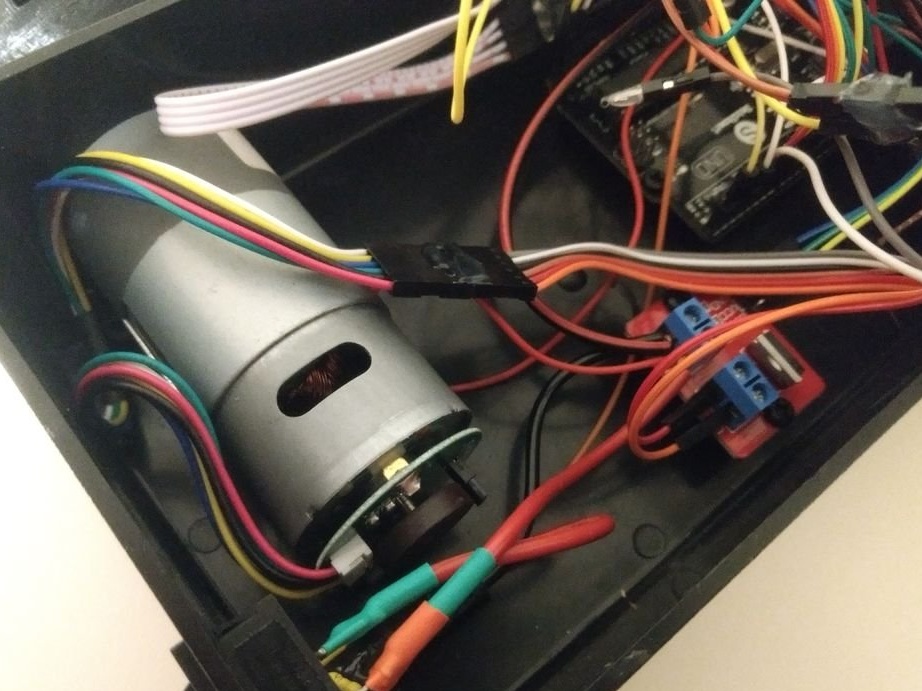
Cuộn dây được lắp ráp trong vỏ PVC có kích thước 200x120x65 mm với chân cao su, thành phần cồng kềnh nhất của thiết bị là động cơ DC 12 volt có cảm biến vị trí YC-52010. Nó được điều khiển thông qua trình điều khiển điện từ bảng Arduino Uno hoặc tương thích. Thông tin được nhập từ bốn nút và điện trở biến đổi 10 kilo ohm và xuất ra màn hình 16x2 với giao diện nối tiếp. Sơ đồ hiển thị một mô-đun để chuyển đổi một màn hình thông thường trên HD44780 thành một chuỗi. Cũng có thể trao đổi qua Bluetooth thông qua mô-đun HC06, nhưng đây là một tùy chọn bổ sung.
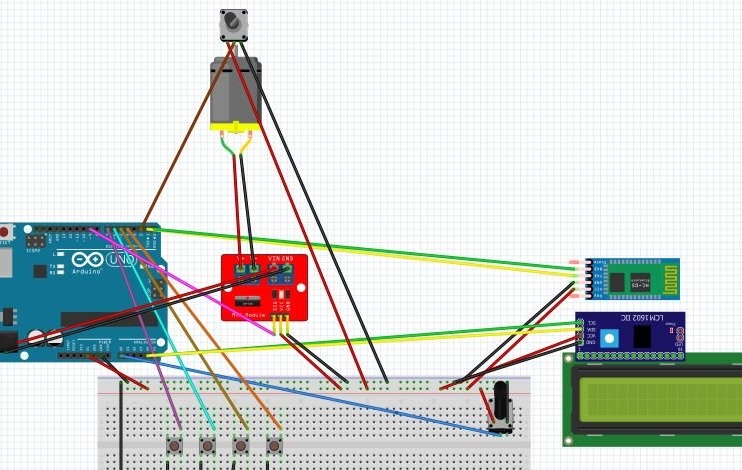
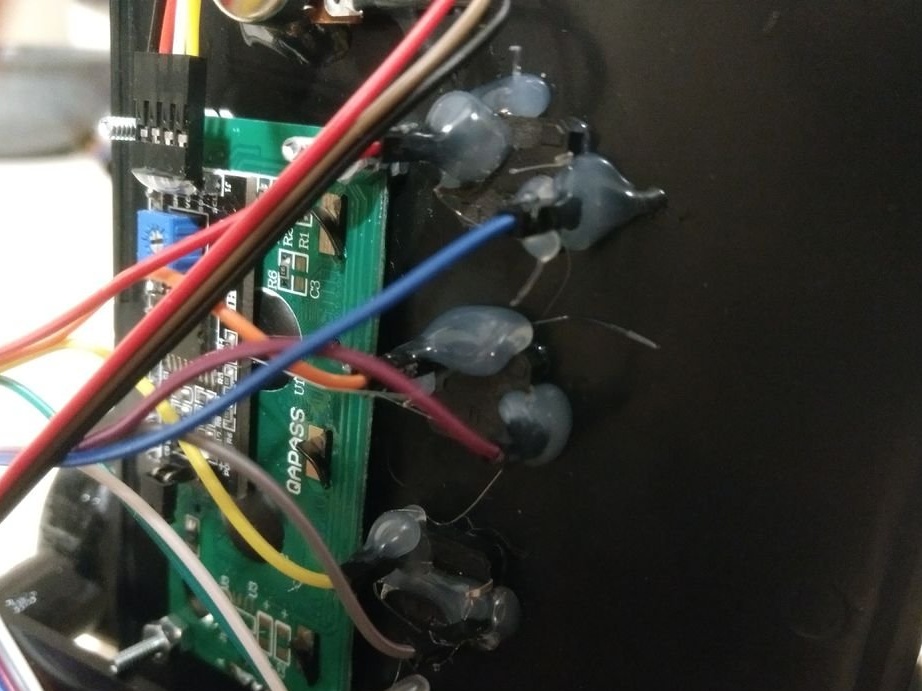
Các nút, khi được nhấn, kéo các đầu vào kỹ thuật số Arduino vào dây chung, sẽ rất tuyệt nếu đưa ra kết luận tương tự với các điện trở, điều này sẽ cải thiện khả năng chống ồn, nhưng TheBigSuleskey thì không. Điện trở thay đổi được kết nối với dây cộng và dây chung với các cực bên và với đầu vào tương tự 0 là đầu giữa. Do đó, điện áp ở đầu vào này thay đổi trơn tru từ 0 đến 5 V so với dây chung.
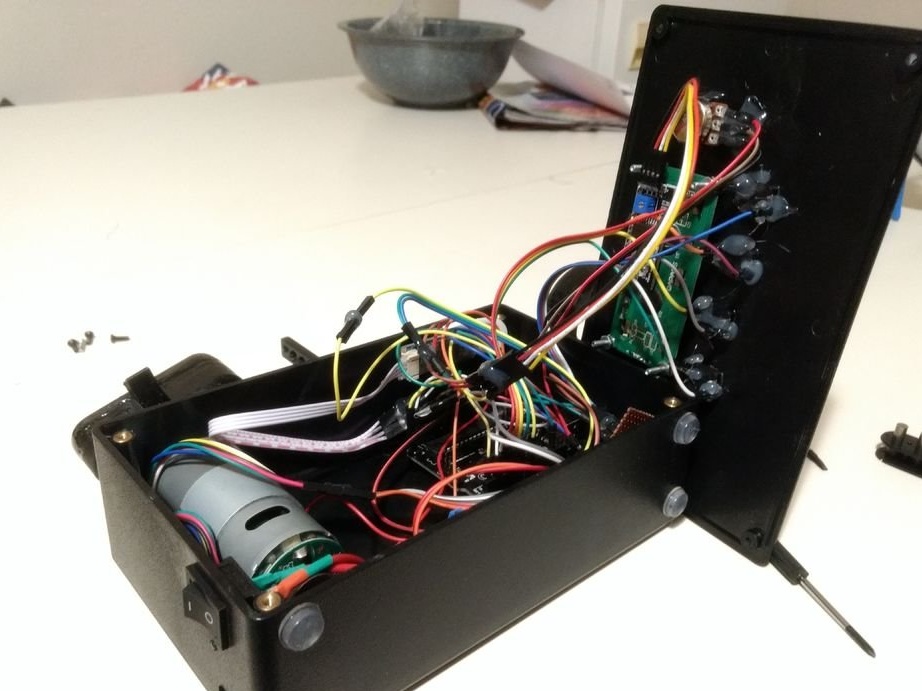
Mọi thứ đều được cung cấp từ nguồn điện 12 V từ netbook (máy tính xách tay sẽ không hoạt động, thường có 19 V). Vì netbook hiện nay không phổ biến lắm, nên một bộ nguồn cho dải đèn LED là phù hợp, do đó nó cũng có thể cung cấp khoảng 4 A.Một bộ định tuyến có thể không phù hợp, từ 1 đến 2 A ở đó, động cơ có thể hoạt động chậm chạp do điện áp bị chùng xuống. Arduino và trình điều khiển động cơ được song song (đừng quên về cực tính), trong khi tất cả các thành phần trên bo mạch Arduino được cung cấp bởi điện áp 5 V thông qua bộ ổn định được cài đặt ở đó. Một số bo mạch chủ tương thích hiện đại không có bộ ổn định, sau đó bạn cần kết nối bảng thông qua bộ ổn định tuyến tính trên chip 7805 hoặc bảng ổn định xung (thường là trên chip MC34063A) để sạc vào bật lửa. Bất kể vị trí của bộ ổn định - trực tiếp trên Arduino hoặc riêng biệt - mô-đun Bluetooth, màn hình hiển thị, cảm biến vị trí và bộ chuyển đổi giao diện từ nối tiếp sang song song đều được cung cấp bởi nó.
Bậc thầy đã cắm một phích cắm vào dây đầu ra của bộ cấp nguồn, có thể chịu được dòng điện tiêu thụ trong toàn bộ mạch và lắp đặt một ổ cắm phù hợp với nó trong trường hợp này. Trình điều khiển và Arduino anh kết nối thông qua một công tắc. Ổ cắm và công tắc cũng phải chịu được dòng điện này.
Trong Arduino, anh đã tải lên cái này, nó không có hỗ trợ Bluetooth, nếu bạn cần, bạn sẽ phải tự thực hiện những thay đổi cần thiết. Và nếu Bluetooth không chỉ không cần thiết mà còn không được lên kế hoạch, mô-đun tương ứng có thể được bỏ qua. Nếu động cơ quay sai hướng thì phải đảo ngược, nếu bộ điều khiển tốc độ hoạt động theo hướng ngược lại, các cực đảo chiều của biến trở phải được đảo ngược. Đã thử nghiệm trên Breadboard cách mọi thứ hoạt động cùng nhau, TheBigSuleskey đã loại bỏ nó và kết nối mọi thứ theo cùng một sơ đồ, nhưng bằng cách hàn.
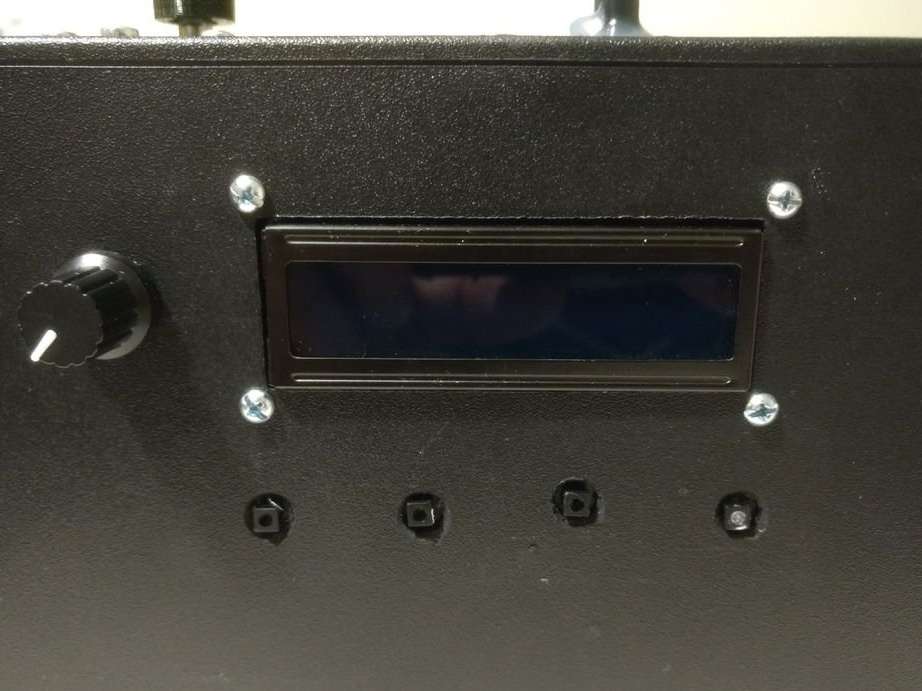
Trong trường hợp, chủ đã tạo ra các lỗ cho các nút, công tắc, ổ cắm, trục động cơ, biến trở, v.v. Ông đã sử dụng một dụng cụ cầm tay cho việc này, vì máy cắt laser không phù hợp với điều này, nhưng chỉ với một chiếc mũ trùm rất mạnh: PVC phát ra nhiều khói hơn các loại nhựa khác. Lướt ổ cắm điện bằng epoxy, anh chắc chắn rằng nó không vào được bên trong. Và ổ cắm USB Arduino đã được nộp một chút. Chân cao su là cần thiết, không có chúng, cơ thể sẽ ngẫu nhiên đi xe quanh bàn. Ở đây, thiết kế đã hoàn thành được hiển thị từ các mặt khác nhau với các phần được in 3D đã được cài đặt, nhiều hơn về sau.


Các yếu tố của mạch khó khăn, nhưng đã vào trường hợp:

Bạn có thể lấy bất kỳ nhựa để in 3D. Chất làm đầy nhỏ, nhưng các bức tường dày hơn để có một lề cho mài thủ công tiếp theo. Loại bỏ các jumper từ các bộ phận in.
Các tập tin để in vòng và hướng dẫn có lỗ không được hiển thị. Vòi trên trục động cơ bao gồm ba phần:, và. Đặt chúng lại với nhau, chủ nhân đảm bảo rằng phần dưới dán vào phần trên, nhưng không dính vào keo di chuyển. Trước đó, anh đã đặt bút máy vào các lỗ tương ứng ở phần dưới của lò xo và nam châm trong hốc của cái di động. Tại vòi phun thành phẩm, anh hơi làm ấm lỗ cho trục động cơ bằng máy sấy tóc để nhựa mềm, đặt toàn bộ cấu trúc lên trục và để nguội. Sau đó, thiết bị đã sẵn sàng để kiểm tra và sử dụng.