Dáng đi của anh ta rất giống với một con gián thực sự. Khi đi, nó tự tin bước một chút về phía trước. Con gián có tối thiểu các bộ phận phức tạp và rất dễ sản xuất.
1.Video thử nghiệm
Video cho thấy một con gián cơ học từ các góc độ khác nhau trong quá trình hoạt động và di chuyển của nó.
2. Đặc điểm và tính năng.
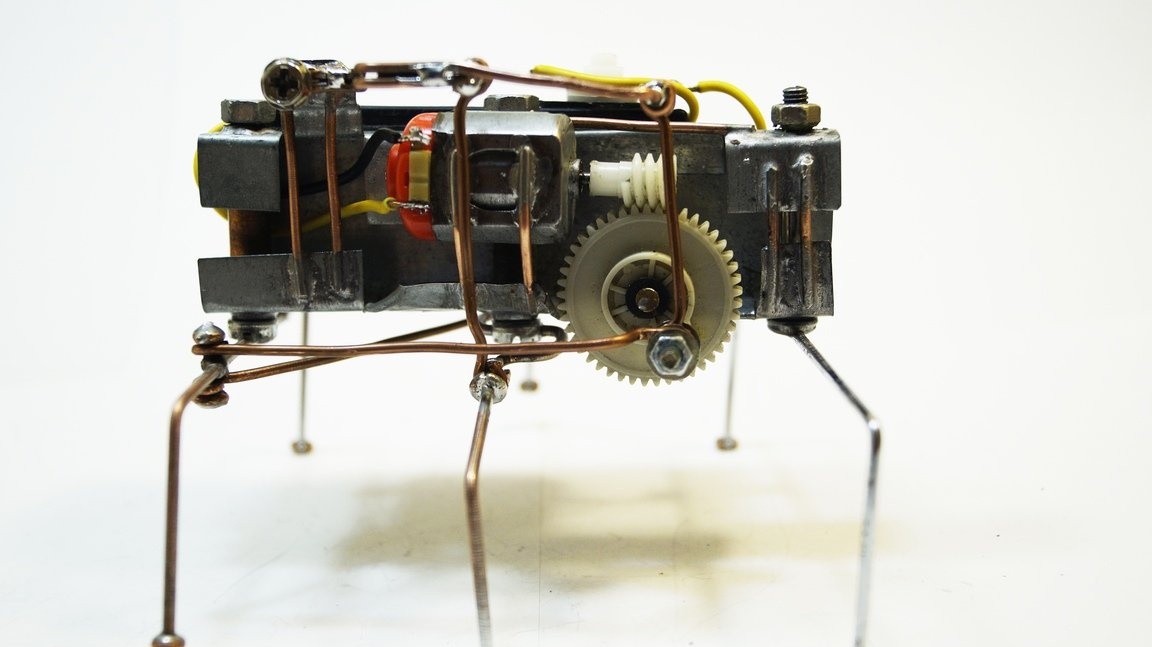
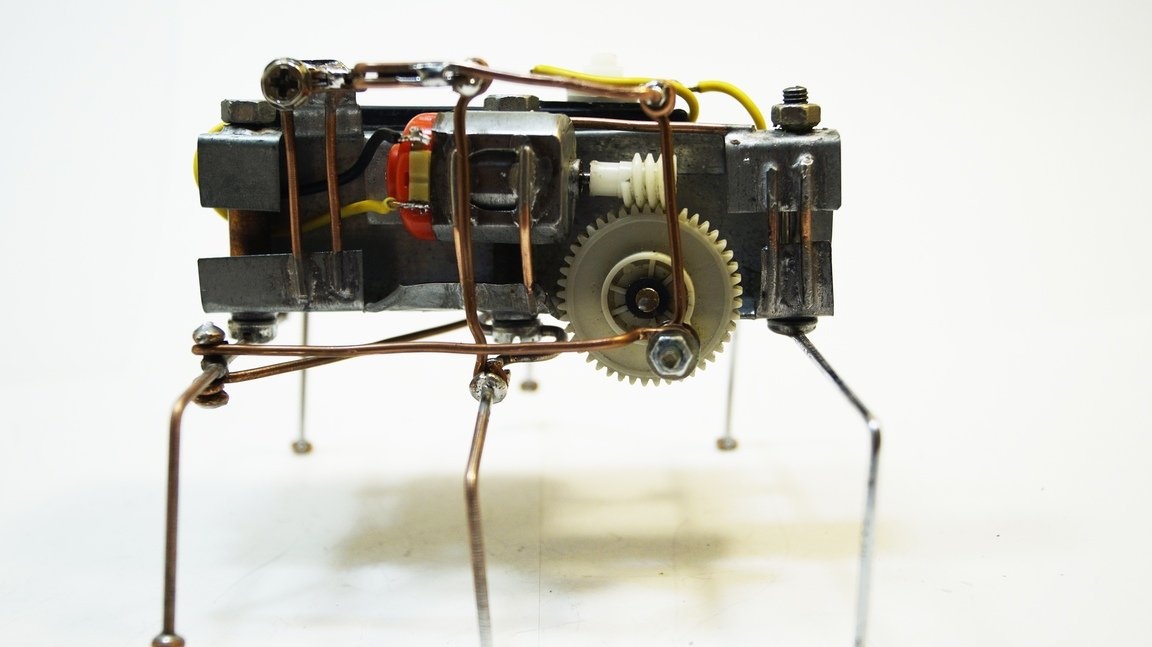
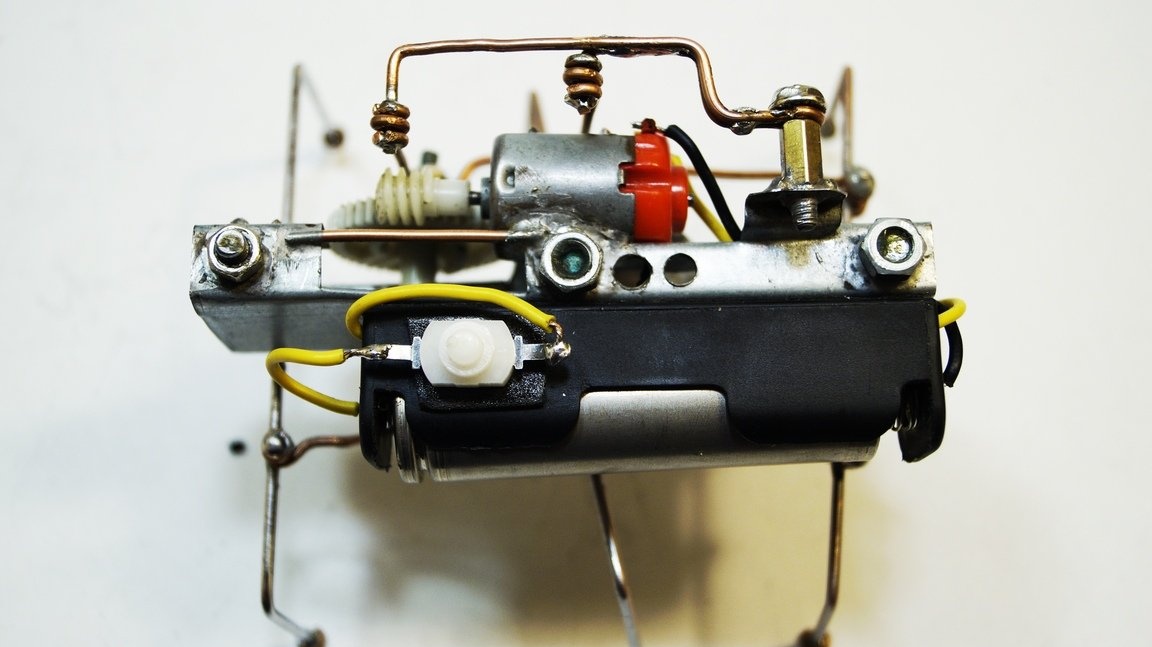
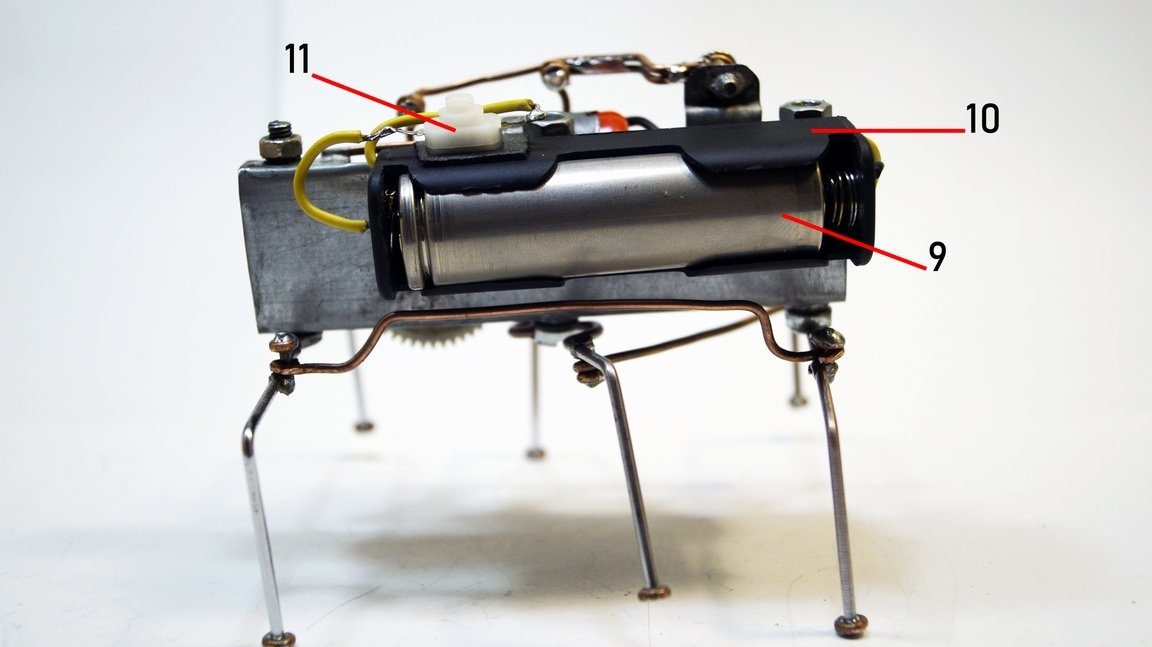
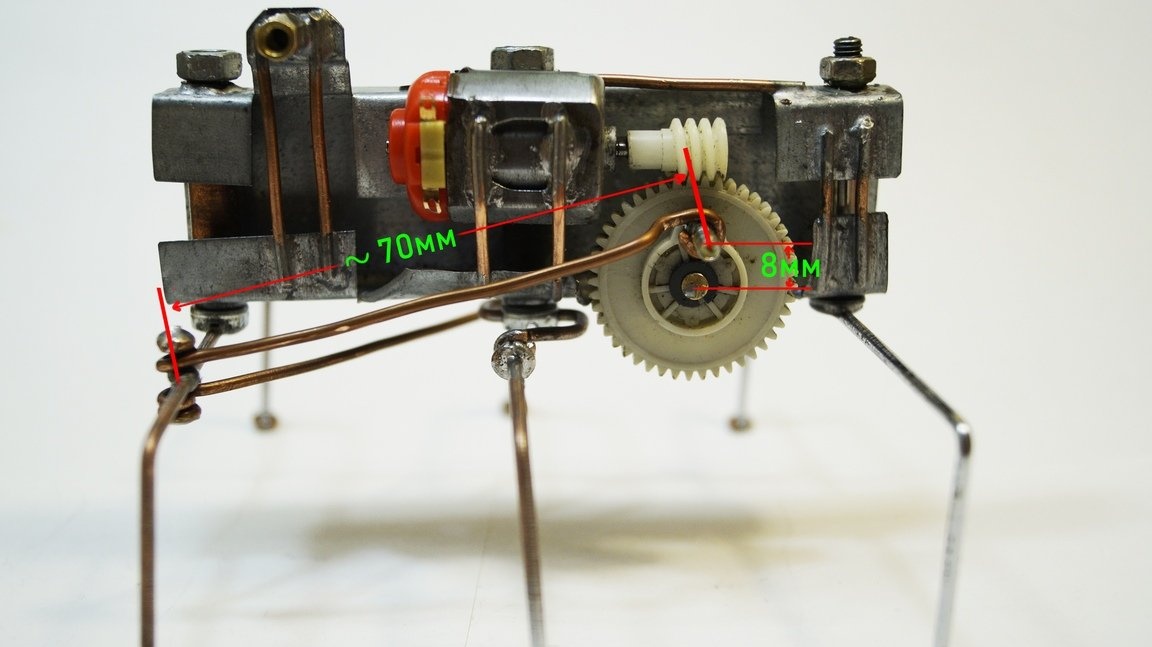
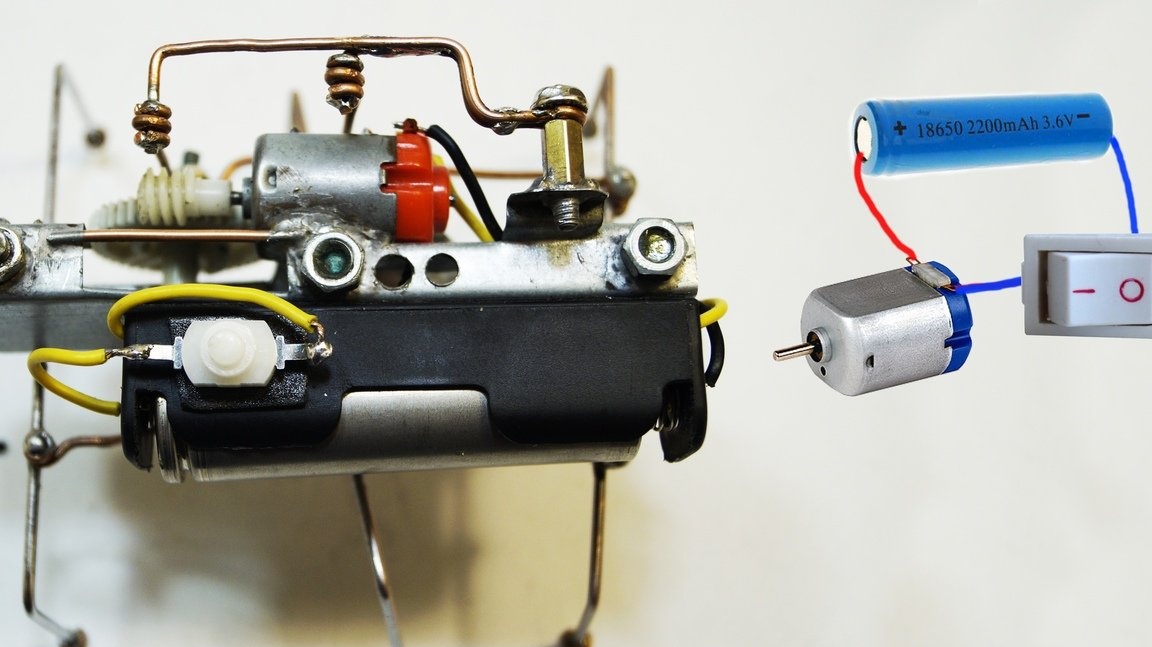
Trên ảnh 1. Con gián cơ học được hiển thị, xem bên. Trên ảnh 2. Chế độ xem trên cùng được hiển thị.
Ảnh 1.
Ảnh 2.
THIẾT KẾ Là một khung, hồ sơ ppn-2 30X20 đã được sử dụng. Động cơ và các khớp khác được gắn bằng hàn. Bàn chân của một con gián được gắn với bu lông M6. Nút nguồn và ngăn chứa pin được dán vào băng keo hai mặt. Là một lực kéo để điều khiển chân của một con gián, một sợi cáp đồng có tiết diện 2,5 mm đã được sử dụng.
ĐỘNG CƠ VÀ CRANKS. Động cơ và trục quay được hàn vào khung trên POS-61, hàn axit ZnCl (Kẽm clorua). Để tăng mô-men xoắn và giảm kích thước, một thiết bị worm đã được sử dụng.
DINH DƯ .NG. Một pin 18650 được sử dụng làm năng lượng của robot. Nguồn điện là 3,7V.
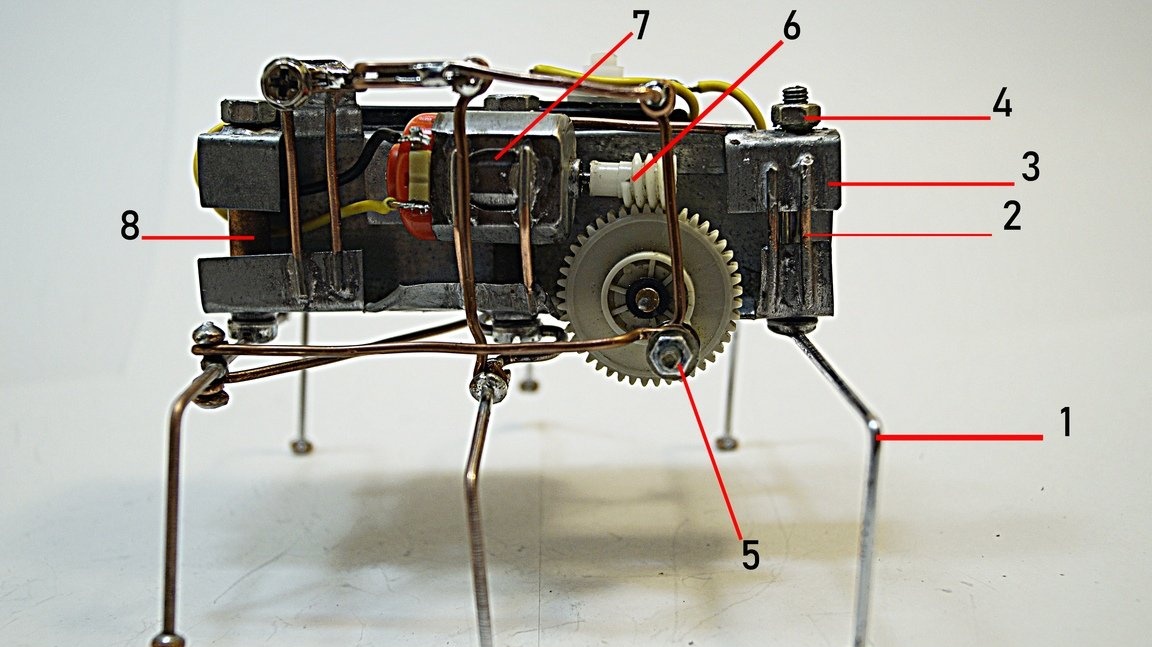
CHI TIẾT THIẾT KẾ ROBOT
1. Bàn chân của một con gián.
2. Chất làm cứng.
3. Khung.
4. Trục của bàn chân của một con gián.
5. Cơ chế quây.
6. Ổ giun.
7. Động cơ điện F130 5 V.
8. Trục tay áo của bàn chân gián.
9. Loại pin 18650, 3.7 V.
10. Ngăn chứa pin.
11. Nút nguồn.
3. Nguyên tắc làm việc.
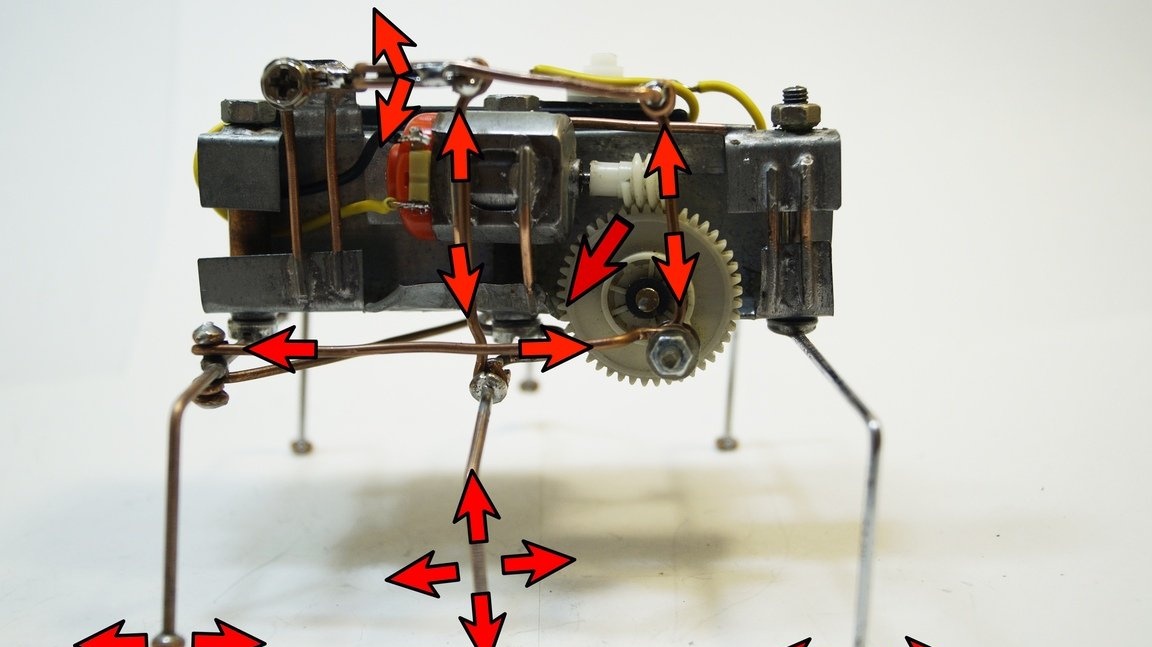
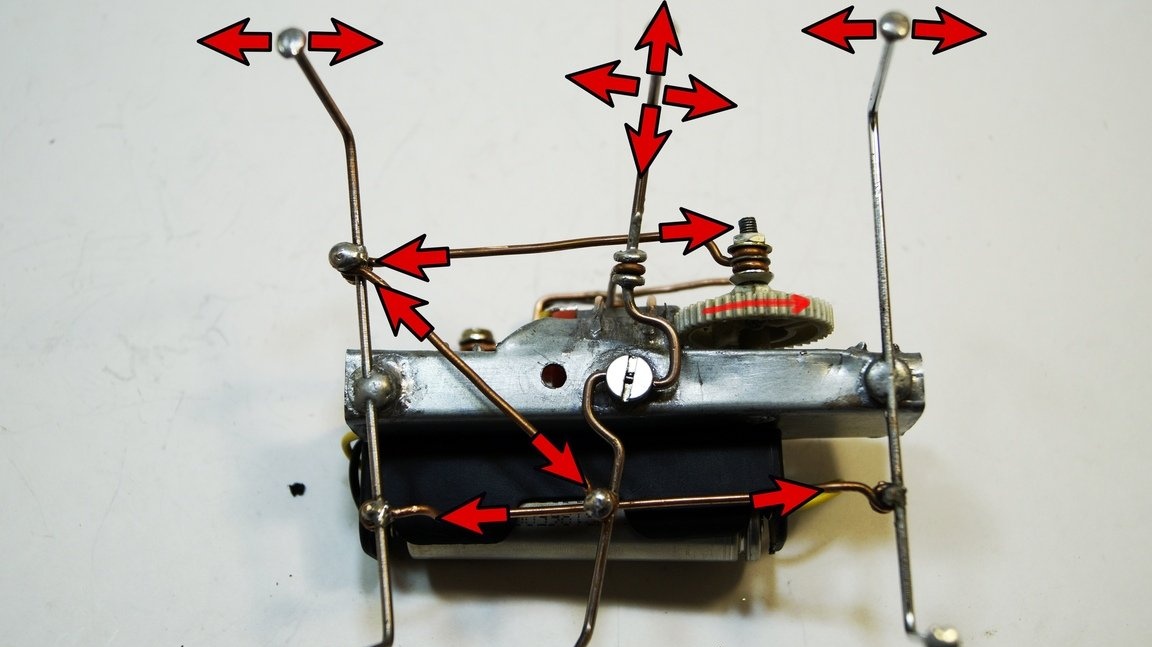
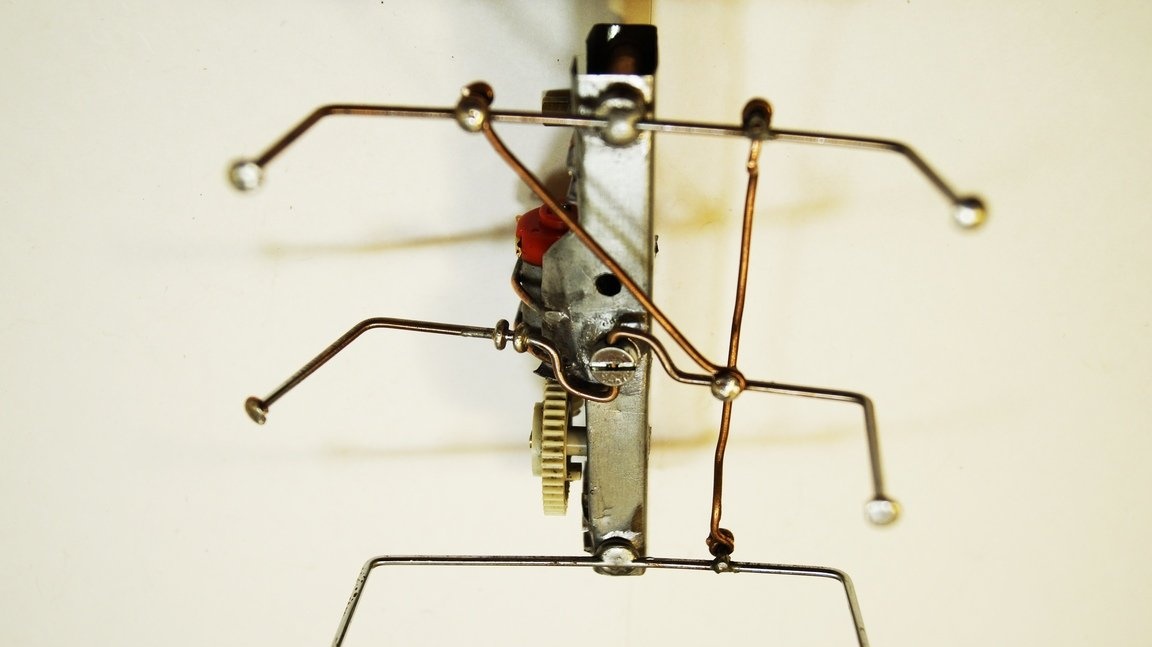
Trên một bức ảnh 3. 4. Nguyên tắc làm việc của các bộ phận cơ học của một con gián được hiển thị. Điều đáng nhớ là chân trước và chân sau của robot đang di chuyển theo chiều ngang, và chân giữa đang di chuyển theo chiều dọc và chiều ngang.
Nguồn được cung cấp cho động cơ điện thông qua chìa khóa, động cơ quay cơ cấu quay. Tay quay điều khiển chân trước thông qua lực kéo, tương ứng, từ chân trước, lực đẩy đẩy chân sau (chúng di chuyển đồng bộ). Cặp bàn chân giữa được kết nối với cặp đầu tiên, theo chiều ngang (chúng di chuyển trong antiphase).
Để di chuyển cặp bàn chân giữa theo chiều dọc, một đòn bẩy được gắn phía trên động cơ, được đặt trong chuyển động từ cơ cấu tay quay.
Ảnh.3
Ảnh.4
4. Vật liệu và dụng cụ.
1.Số sắt 50W.
2. Ngăn chứa pin.
3.Prysoy POS-61.
4. Một dây đồng có tiết diện 2,5 mm.
5. Hàn axit ZnCl (Kẽm clorua)
6. Động cơ điện F130 5V.
7. Kéo cho kim loại.
8. Ổ giun.
9. Kìm.
10. Ống thép, đường kính 80mm.
11. Pin sạc 18650.
12.Profile PPN-2 30X20.
Và cũng: (nút nguồn, băng keo hai mặt, dây gắn)

5. Hướng dẫn lắp ráp.
1. Làm khung con gián.
Vẽ đánh dấu trên hồ sơ như được chỉ ra trong Ảnh 5.
Ảnh 5.
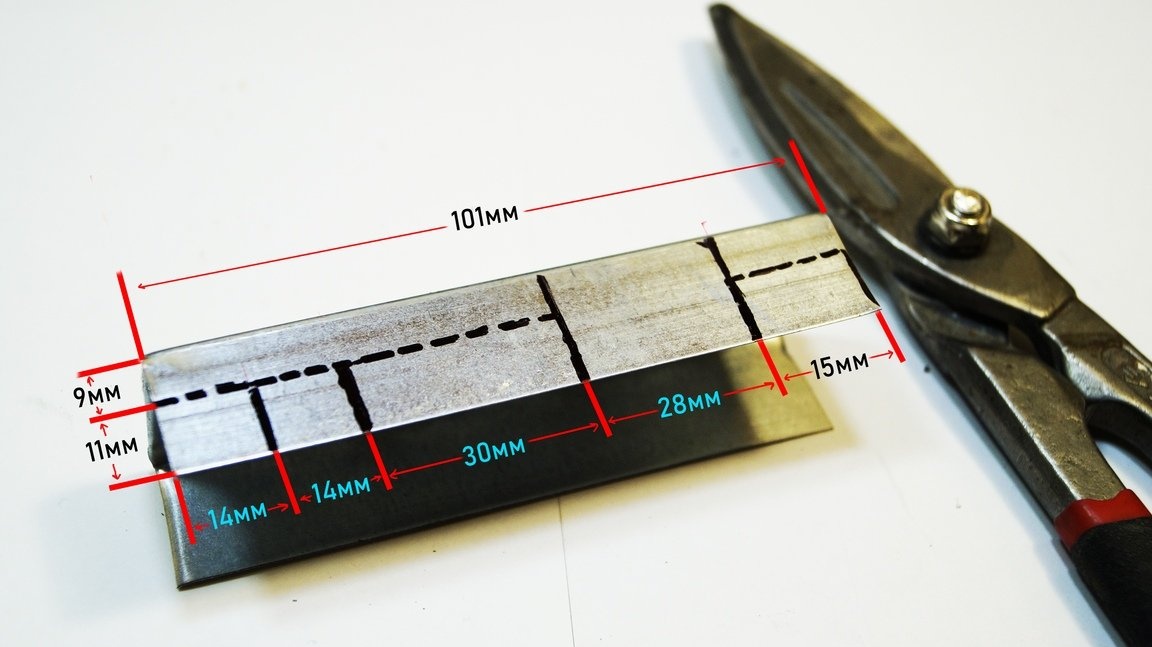
Sử dụng kéo cho kim loại, chúng tôi cắt và uốn phôi bằng kìm như trong ảnh 6. Đánh dấu phần dưới như được chỉ ra trong ảnh 6. Uốn hồ sơ bằng kìm như trong ảnh 7.
Ảnh 6.
Ảnh 7.
2. Động cơ điện và trục khuỷu.
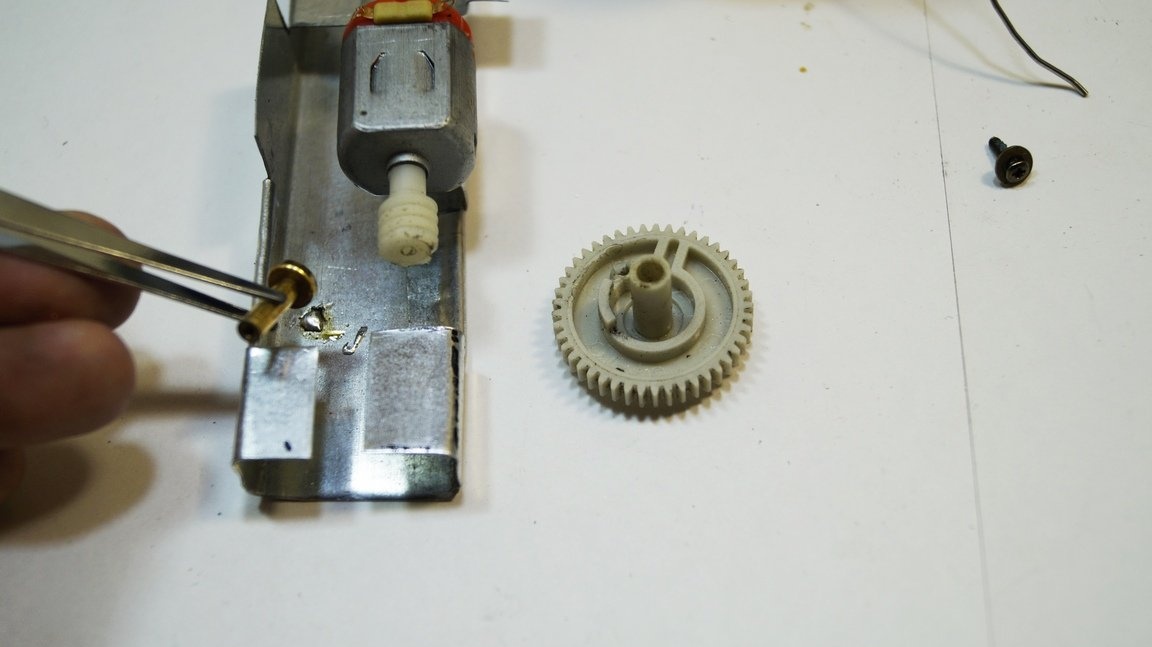
Bước tiếp theo là hàn động cơ điện vào khung. Động cơ trước khi hàn sẽ cần phải được tháo rời. Chúng tôi làm ngập vỏ động cơ và khung bằng sắt hàn Ảnh 8.
Chúng tôi hàn thân động cơ điện và khung với nhau, làm ấm các bộ phận bằng bàn hàn, ép chúng vào nhau Ảnh 9. !!! HÃY CẨN THẬN, CHI TIẾT NHIỆT TÌNH YÊU NHIỀU !!!
Ảnh 9.
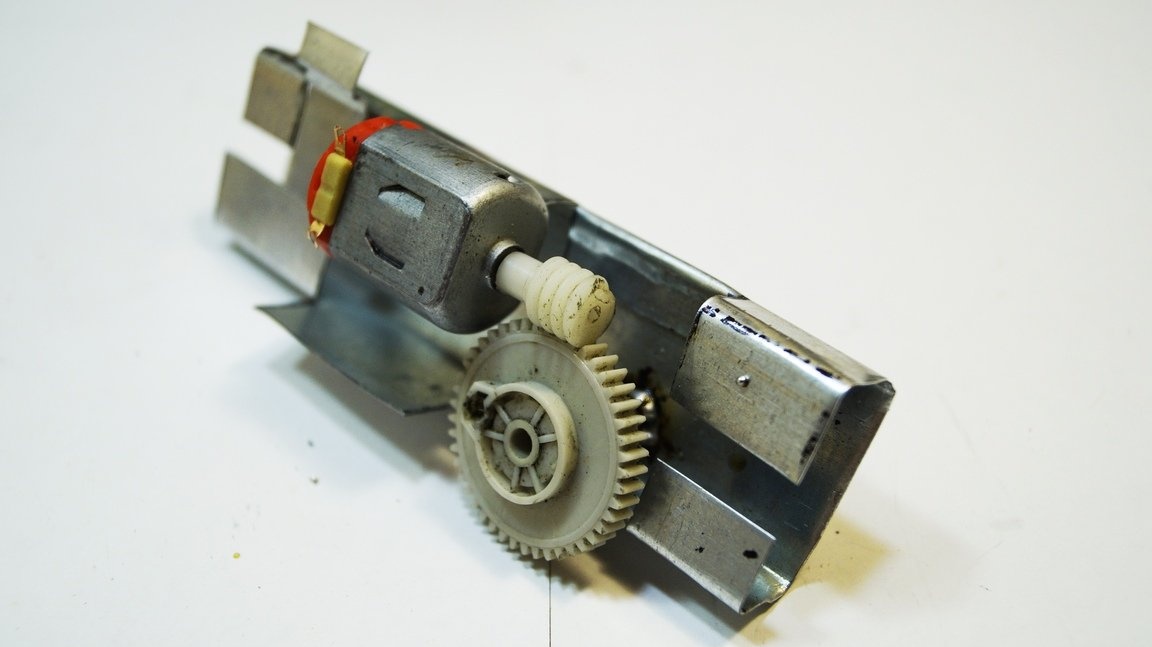
Đưa động cơ điện trở lại. Chúng tôi hàn trục quay tại chỗ, điều này được thực hiện bằng thực nghiệm. Các bánh răng sâu nên được lắp tốt với nhau, các bánh răng không nên bị lệch. Ảnh 10.11.
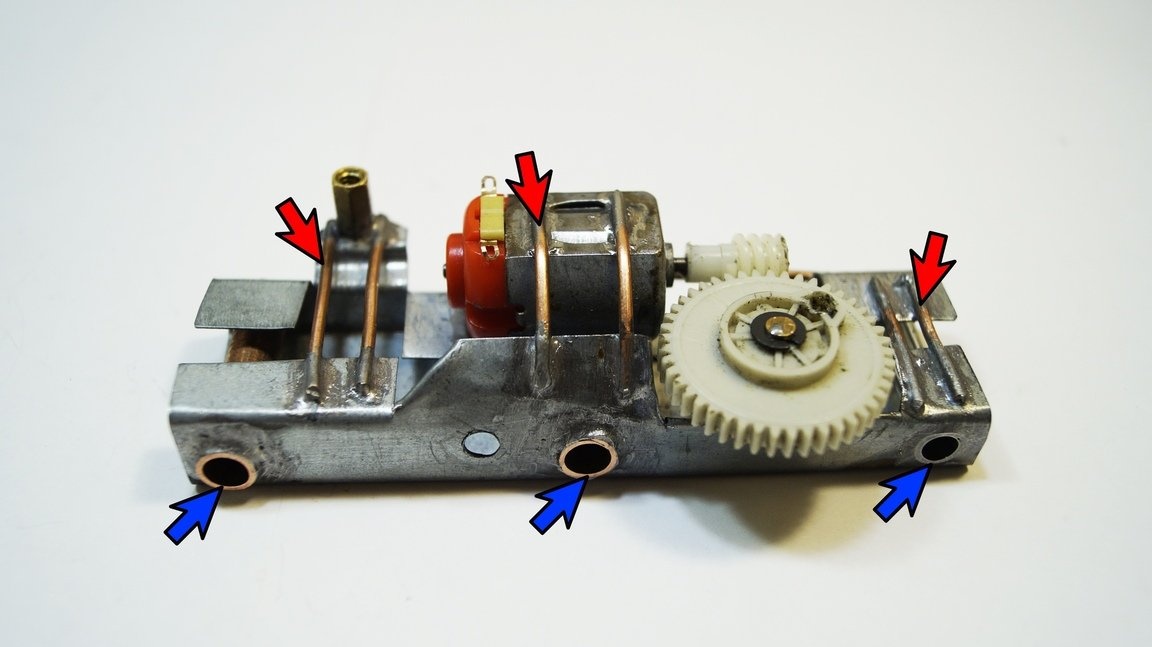
3. Lỗ cho chân của một con gián.
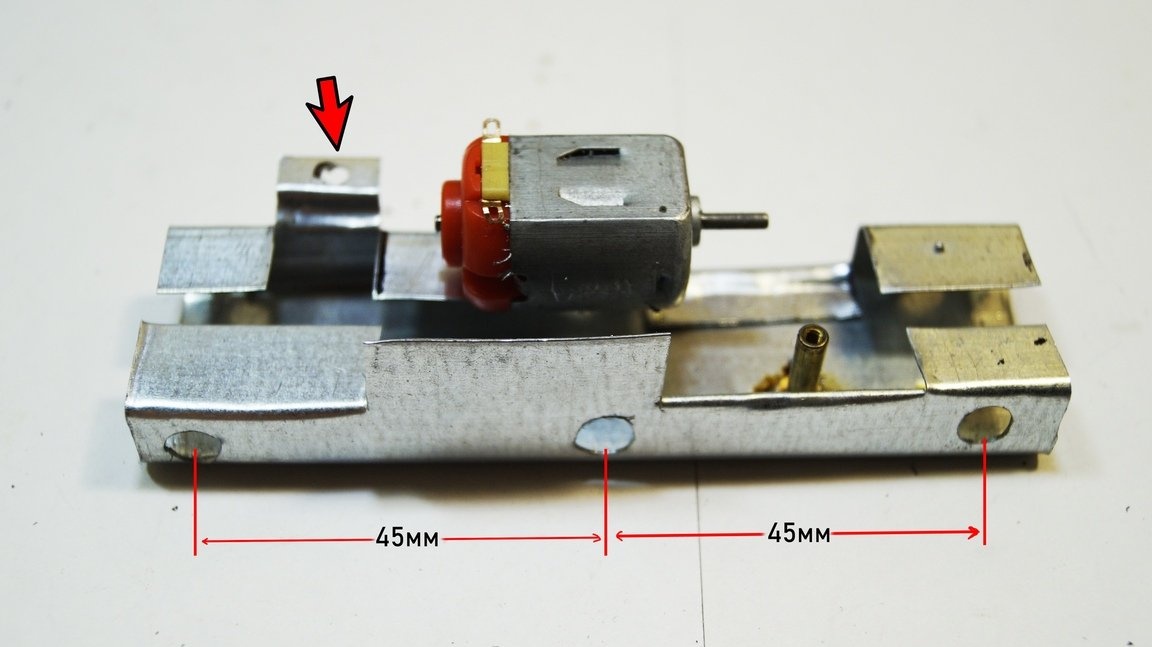
Để gắn bàn chân gián vào khung, bạn cần khoan lỗ bằng mũi khoan 8 mm. Chúng tôi khoan một lỗ trên tai phía sau động cơ điện bằng mũi khoan 3,2mm
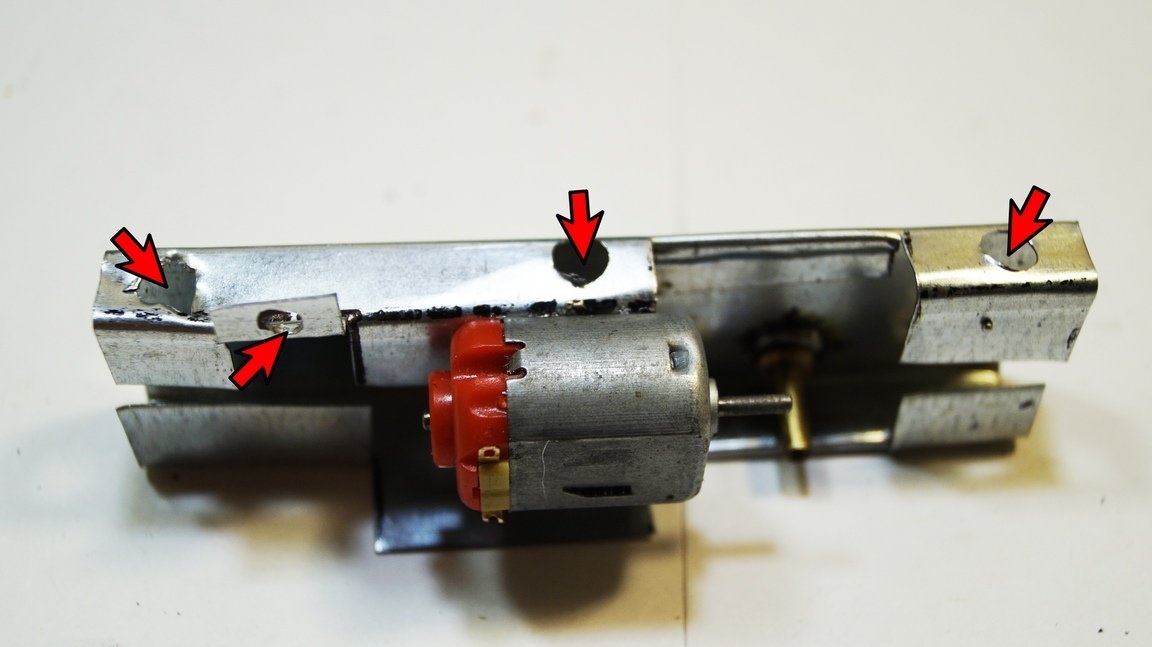
Chúng tôi cũng hàn một đai ốc ở tai phía sau động cơ điện. Cần gạt chịu trách nhiệm nâng các chân giữa dọc theo trục dọc sẽ được gắn vào đai ốc này
Để tăng cường thiết kế khung, các chất làm cứng được hàn bằng dây đồng 2,5 mm.
Ống lót 8 mm cũng được hàn vào các điểm đính kèm của chân gián Ảnh 15.
4. Bàn chân của một con gián.
Một dây kim loại có đường kính 3 mm được sử dụng làm móng gián, nó được hàn vào đầu của bu lông M6 Ảnh 16. Cặp chân gián giữa được tạo ra khác nhau, một lỗ được khoan vào đầu bu lông dọc theo đường kính của dây. Dây được uốn cong theo hình chữ cái Siên, điều này sẽ cho phép chân của con gián di chuyển theo chiều dọc. Ảnh 17.
Ảnh 16.
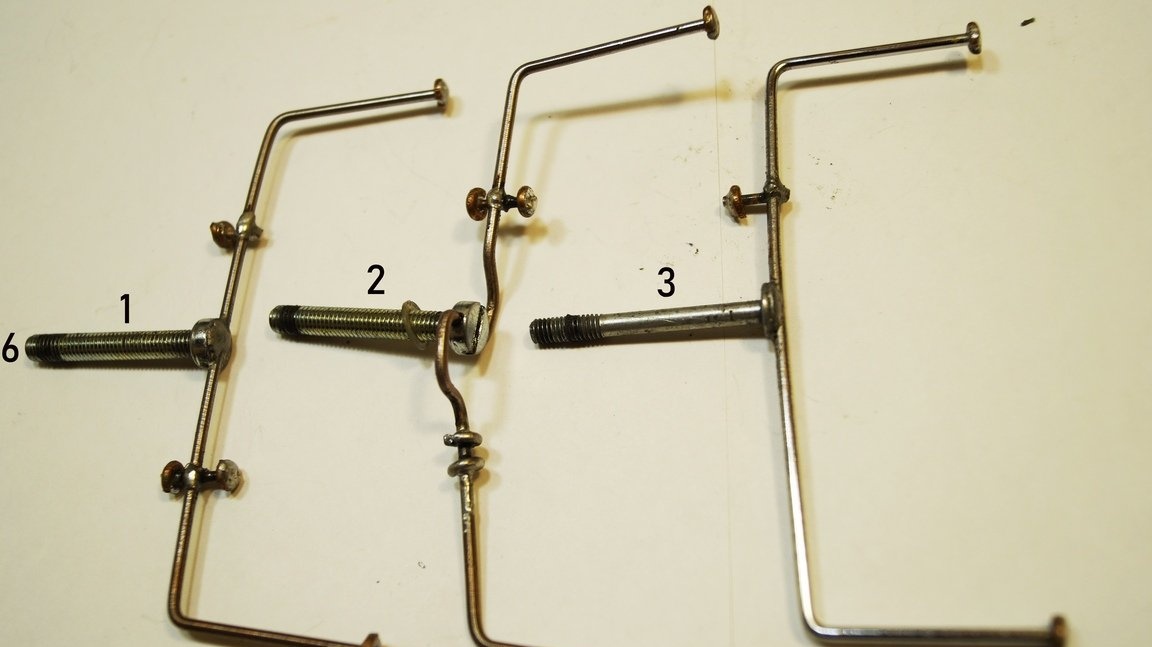
Ảnh 17.

Để cố định các thanh, một dây đồng có tiết diện dài 2,5 mm dài 12 mm được hàn vào móng của con gián, vòng đồng được hàn vào đầu của nó. Các thanh được làm bằng dây đồng có tiết diện 2,5 mm, kích thước gần đúng, nên uốn dây để trong tương lai có khả năng điều chỉnh dọc theo chiều dài của Ảnh 18.
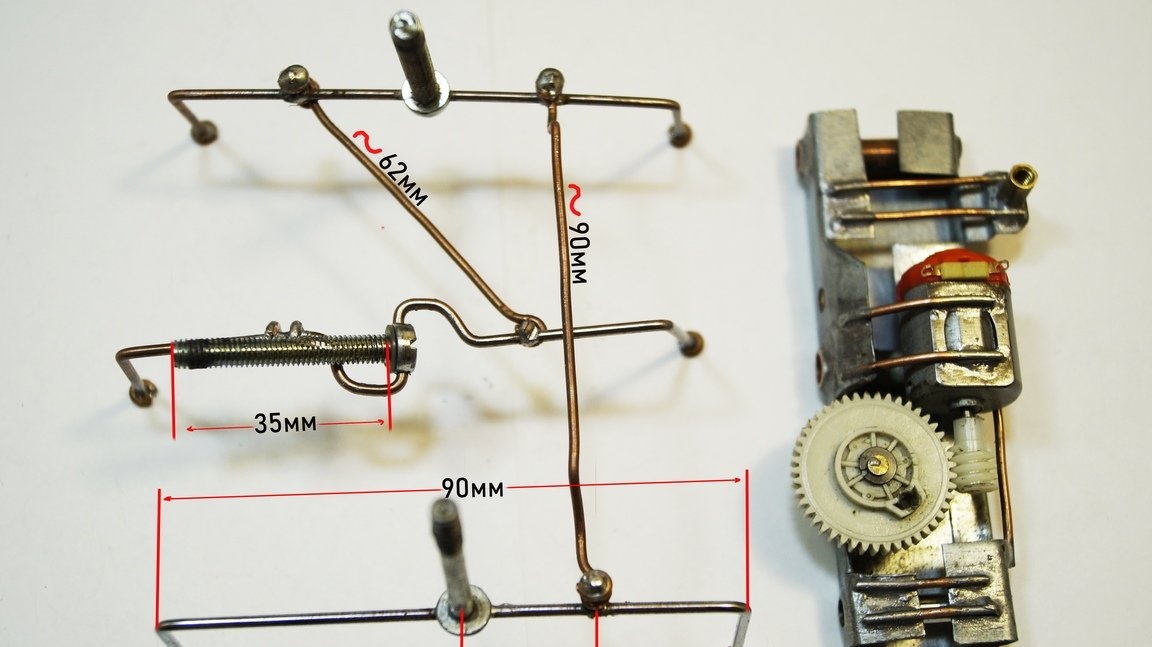
Ảnh 19 cho thấy góc nhìn phía dưới, với các chân được gắn trên khung.
Chúng tôi thiết lập lực kéo từ cơ cấu tay quay đến chân trước của con gián. Chúng tôi làm một lực đẩy với một viền cho khả năng điều chỉnh nó. Bán kính quay tay 8 mm Ảnh 20.
Chúng tôi tạo một đòn bẩy để di chuyển bàn chân giữa theo chiều dọc từ dây đồng Ảnh 21,22.
Điều này hoàn thành phần cơ học của con gián.
Ảnh 21.

Ảnh 22 cho thấy vị trí của bàn chân ở vị trí thấp hơn của trục của cơ cấu quay.
Ảnh 22.

5. Phần điện.
Dán keo ngăn pin trên băng dính hai mặt vào khung con gián. Dán nút nguồn trên ngăn chứa pin. Chúng tôi hàn tất cả các yếu tố của Ảnh 23.
Robot - con gián đã sẵn sàng !!!