







Khái niệm chính của dự án này là với sự trợ giúp của nhiều loại sóng não khác nhau, người dùng sẽ có thể điều khiển robot, con trỏ trên PC hoặc bật / tắt đèn trong nhà, trong khi vi điều khiển (Particle Photon) tạo ra một phân tích trực tuyến về sóng não của người dùng. Vì vậy, có, với thiết bị này, bạn thực sự có thể sử dụng Sức mạnh của Suy nghĩ
 ... Thiết bị này không chỉ dành cho người lười biếng hoặc người hâm mộ, nó được tạo ra để mang đến cho mọi người cơ hội. người đấu tranh mỗi ngày với khuyết tật của họ. Robotđược phát triển bởi tác giả hoạt động giống như một hệ thống xe lăn nhà tự động hóa sẽ giúp người dùng điều khiển ánh sáng hoặc tivi, ngay cả khi họ không thể di chuyển. Chế độ điều khiển PC có thể hữu ích ngay cả với những người hoàn toàn khỏe mạnh.
... Thiết bị này không chỉ dành cho người lười biếng hoặc người hâm mộ, nó được tạo ra để mang đến cho mọi người cơ hội. người đấu tranh mỗi ngày với khuyết tật của họ. Robotđược phát triển bởi tác giả hoạt động giống như một hệ thống xe lăn nhà tự động hóa sẽ giúp người dùng điều khiển ánh sáng hoặc tivi, ngay cả khi họ không thể di chuyển. Chế độ điều khiển PC có thể hữu ích ngay cả với những người hoàn toàn khỏe mạnh. Nó hoạt động như thế nào?
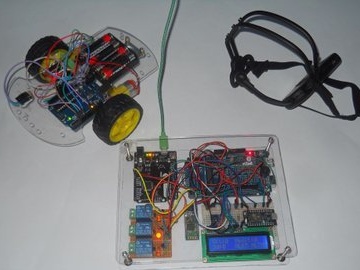

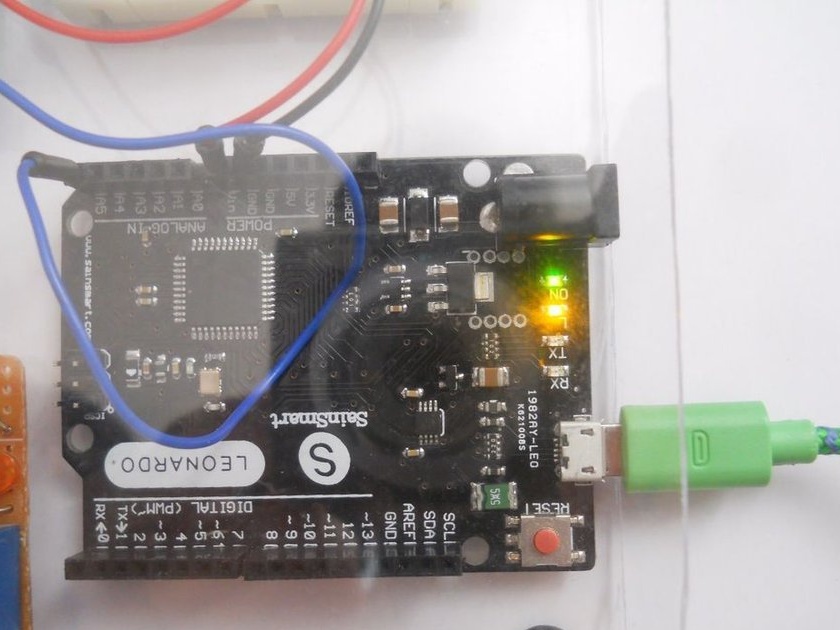
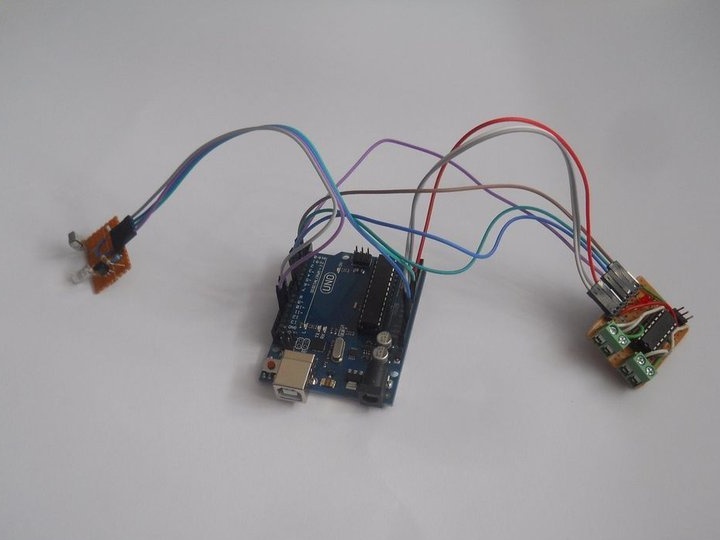
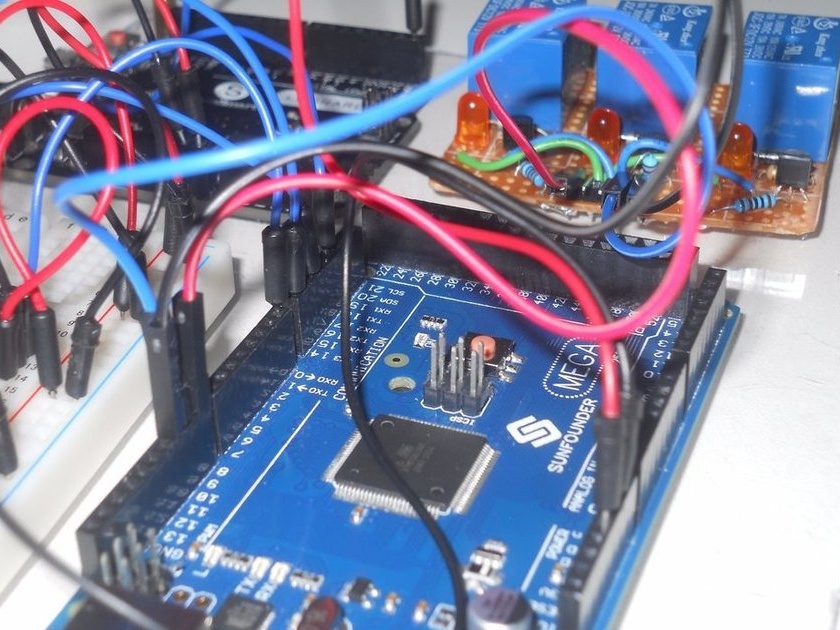
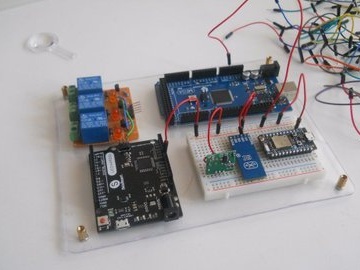
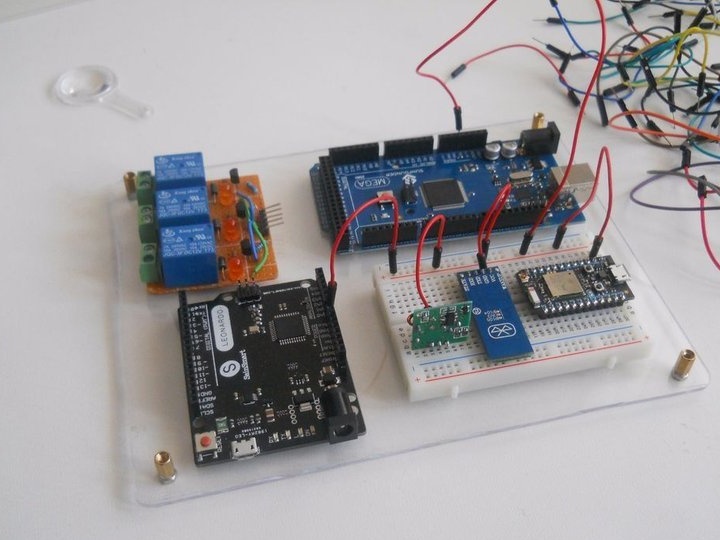
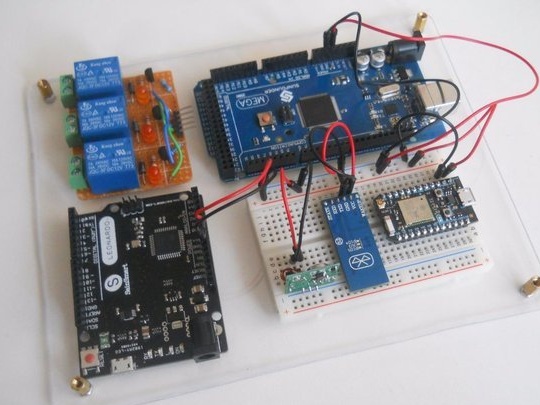
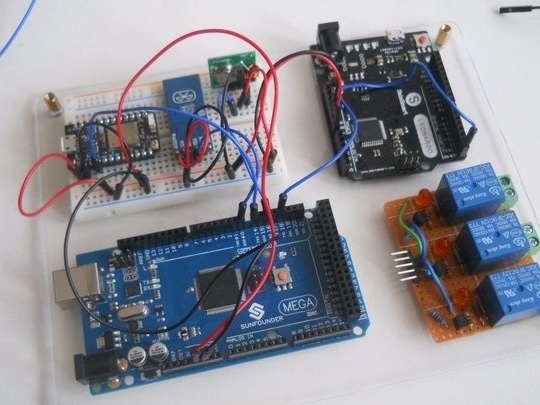
Bốn bộ vi điều khiển đã được sử dụng để đưa dự án này vào cuộc sống: Arduino Mega, Arduino Leonardo, UNO và Hạt Photon. Mega là bộ não của dự án, nhận tín hiệu từ tai nghe, phân tích và gửi lệnh đến các thiết bị khác. Truyền tất cả dữ liệu cho Hạt Photon, tạo ra một máy chủ web. Leonardo điều khiển chuột trên PC và Uno được sử dụng để nhận IR (tín hiệu hồng ngoại) và điều khiển robot. Một thiết bị có khả năng kiểm soát ba thiết bị khác nhau (hoặc nhiều hơn nếu bạn muốn lập trình một cái gì đó khác). Hơn nữa, ba thiết bị khác nhau này sẽ được gọi là các kênh. Thiết bị sẽ chuyển giữa các kênh này nếu bạn nhắm mắt lại:
Nhắm mắt trong 1-2 giây: chuyển sang chức năng tự động hóa gia đình
Nhắm mắt trong 2-4 giây: chuyển sang chế độ điều khiển robot
Nhắm mắt trong 1-6 giây: chuyển sang chế độ điều khiển chuột
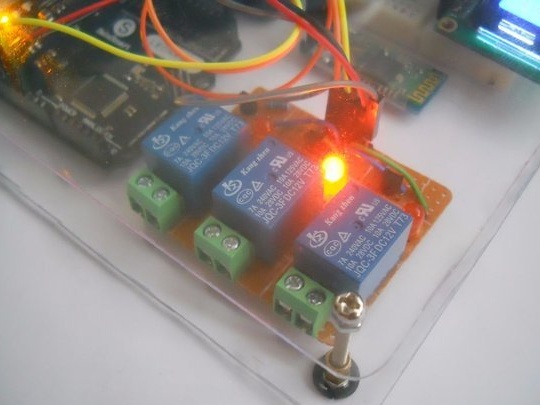
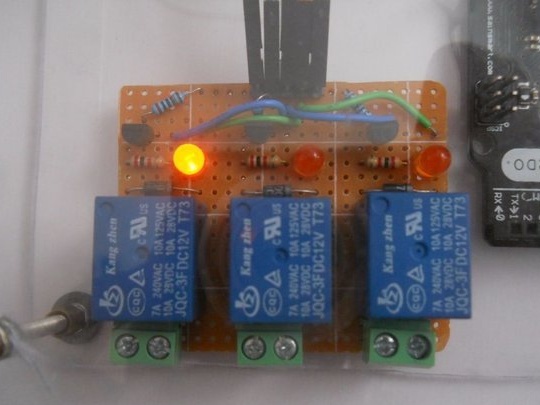
Để thực hiện chức năng tự động hóa gia đình, bạn có thể kết nối mọi thứ: TV, bóng đèn, ổ cắm, bất cứ thứ gì bạn muốn, rơle đã được sử dụng
Đối với nhận thức về sóng não - Necomimi, có thể di chuyển đôi tai của bạn tùy thuộc vào sóng não của bạn (chú ý, thiền định). Bên trong một con chip nhỏ đọc sóng não, lọc tiếng ồn và cho tín hiệu rất tốt. Nó hoạt động với giao diện UART (Nối tiếp), vì vậy với một số hack chúng ta có thể sử dụng Arduino để đọc sóng não.Vai trò của tai nghe này là truyền không dây sóng não đến một máy chủ trung tâm.
Nếu bạn đã quen thuộc với dự án trướcsau đó bạn có thể bỏ qua giai đoạn tháo gỡ và tu sửa Necomimi.
Đi xuống để xem cách tháo rời và tạo một tai nghe Bluetooth không dây ra khỏi nó.
Hệ thống điều khiển tự động hóa gia đình
Nếu bạn chuyển sang chế độ tự động hóa tại nhà, hãy tăng mức độ chú ý của bạn lên trên 70 để bật rơle đầu tiên, tăng mức thiền trên 70 để bật rơle thứ hai và tăng cả hai giá trị trên 70 để bật rơle thứ ba. Đó là một chút khó khăn, nhưng không phải là không thể sau khi đào tạo tâm trí. Nếu rơle đã được bật, sử dụng cùng một lệnh để tắt nó (nếu nó bật, đạt 70 để tắt). Khi hệ thống đã sẵn sàng, mọi thiết bị điện áp cao (ánh sáng, TV, máy tính, quạt, bất cứ thứ gì) có thể được kết nối với mô-đun tiếp sức.
Kiểm soát chuột
Con trỏ được điều khiển bởi cảm xúc. Nếu mức độ chú ý nhỏ hơn 25 thì nó di chuyển sang trái, nếu từ 25 đến 50 thì nó di chuyển sang phải, nếu từ 50 đến 75 thì nó tăng lên và nếu từ 75 đến 100 thì nó giảm xuống. Bạn có thể phát ra một cú nhấp chuột vào nút chuột bằng cách tăng mức độ thiền định. Tất nhiên, bạn cần phải đào tạo cho việc này.
Điều khiển robot
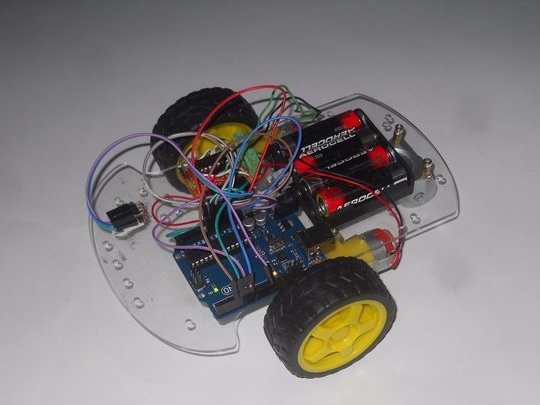
Robot chỉ có ba đội khác nhau: dừng lại, rẽ trái và tiến về phía trước. Tại sao chỉ có hai lựa chọn chuyển động? Bởi vì hai hướng này là đủ để di chuyển robot bất cứ nơi nào. Sử dụng mức độ thiền định của bạn để xoay với robot và khi bạn đã đạt được hướng bạn muốn di chuyển, hãy dừng robot, sau đó tiến về phía trước với mức độ chú ý. Đây là cách tốt nhất để điều khiển robot và ngay cả những người mới bắt đầu không thể kiểm soát các giá trị chú ý / thiền định của mình để có thể chơi với robot này.
Tai nghe truyền tín hiệu BT (Bluetooth) đến Arduino Mega, phân tích các byte đến và tùy thuộc vào suy nghĩ của người dùng, điều khiển các chức năng khác nhau. Lúc đầu, tác giả muốn sử dụng Particle Photon làm máy phát dữ liệu, nhưng mô-đun nhỏ này có vai trò tạo máy chủ web. Đó là sửa đổi lớn nhất trong toàn bộ dự án. Ông cũng sử dụng các mô-đun Arduino tự chế, nhưng bạn có thể mua các mô-đun này trực tuyến.
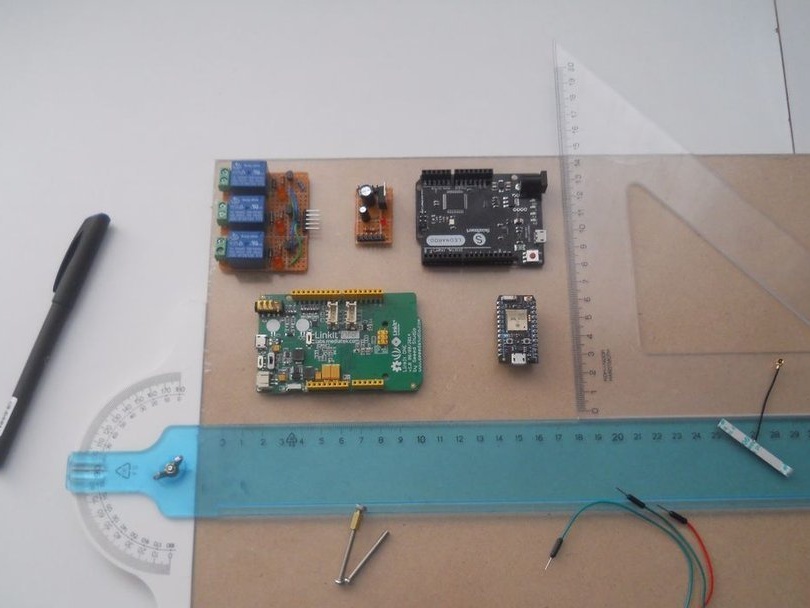
Tất cả các bộ phận là từ GearBest.com. Đây là một cửa hàng trực tuyến, giống như eBay, nhưng phụ tùng được giao nhanh hơn nhiều (có thể tất cả điều này là trên AliExpress). Do đó, nếu bạn muốn tạo bộ điều khiển trò chơi, bộ điều khiển robot hoặc Force Detecto r của riêng mình, hãy bắt đầu bằng cách mua các bộ phận.
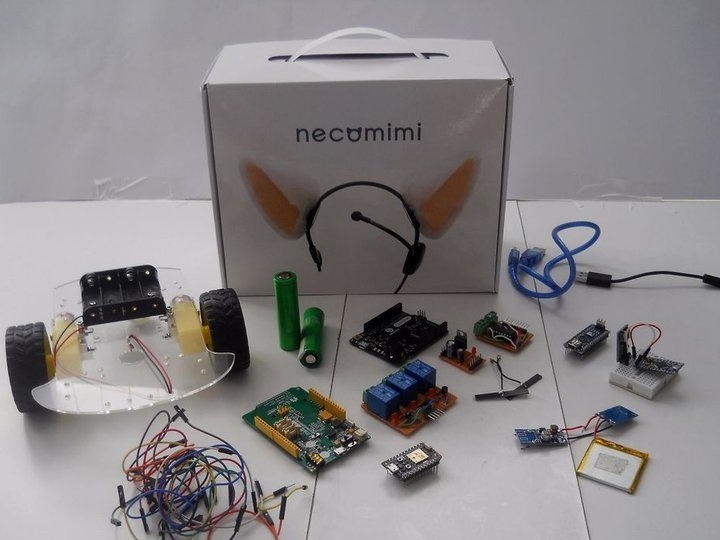






Công cụ cần thiết:
hàn sắt
hàn
súng bắn keo
băng tự dính / băng keo hai mặt
vũ nữ thoát y
máy cắt dây
Thiết bị
/ Arduino Nano
Phần mềm:
Hack Necomimi







Chúng tôi muốn sửa đổi đồ chơi EEG này để truyền dữ liệu qua Bluetooth, vì vậy trước tiên chúng tôi sẽ tháo rời vỏ máy. Vít nằm dưới nhãn dán. Tháo nhãn dán và mặt sau của thiết bị và bạn sẽ tìm thấy các bảng nhỏ bên trong. Cái nằm dưới bo mạch chính là chip Neurosky TGAM. 4 dây từ bảng chính của vi điều khiển được hàn vào nó, vì vậy hãy lấy một que hàn và cẩn thận loại bỏ mạch này. Bây giờ hàn ba dây vào chân GND, chân VCC và chân T. Chân T là đầu ra máy phát với tốc độ 57600 baud, gửi các gói dữ liệu đến vi điều khiển của chúng tôi. Một khi bạn đã hàn ba dây ở trên, bạn có thể xây dựng trong nguồn năng lượng có thể sạc lại của riêng bạn. Tác giả sử dụng pin lithium-ion 500 mAh, mạch sạc USB, mạch tăng áp 5 V và hai điện trở (100 Ohms và 200 Ohms) để cung cấp nguồn điện 3,4 V riêng cho chip và mô-đun Bluetooth. Trong ảnh, sơ đồ kết nối.
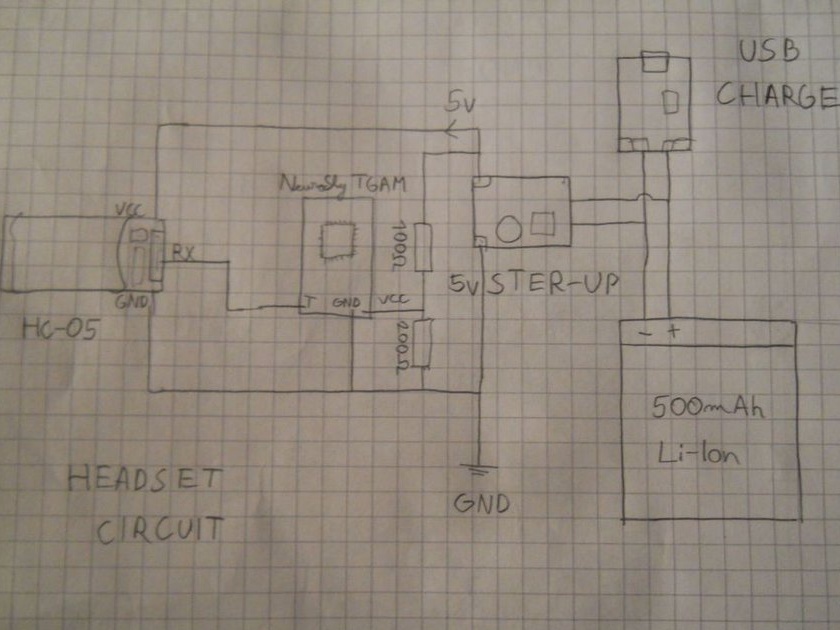
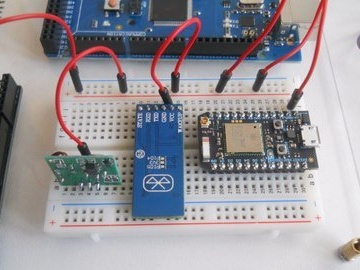
Nếu mạch đã sẵn sàng, hãy định cấu hình mô-đun Bluetooth.
Thực hiện theo các hướng dẫn và số liệu bên dưới và tạo tai nghe EEG không dây của riêng bạn.
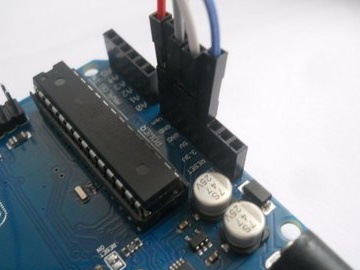
Phần quan trọng nhất là kết nối pin của TẠNG với các loại RX RX trên mô-đun Bluetooth.



HC-06: Đầu tiên hãy tải lên bản phác thảo có tên là HC HC_06_Bluetooth cảm ứng với Arduino UNO, sau đó kết nối mô-đun Bluetooth như trong sơ đồ.
// HC-06-Bluetooth
void setup () {
// Bắt đầu nối tiếp phần cứng.
Nối tiếp.begin (9600); // tốc độ baud mặc định HC-06
độ trễ (1000);
Số sê-ri ("AT");
độ trễ (1000);
Serial.print ("PHIÊN BẢN AT +");
độ trễ (1000);
Số sê-ri ("AT + PIN"); // để xóa mật khẩu
độ trễ (1000);
Số sê-ri ("AT + BAUD7"); // Đặt baudrate thành 576000 - ví dụ: Necomimi dafault
độ trễ (1000);
Nối tiếp.begin (57600); //
độ trễ (1000);
}
void loop () {
}Mở Trình giám sát nối tiếp trong Arduino IDE và đợi Arduino cấu hình mô-đun BT. Mô-đun Bluetooth của bạn hiện được đặt thành 57600 baud. Bạn có thể thử nhiều ứng dụng BCI (Brain Computer Interface) vì đồ chơi Necomimi bị hack này sẽ tương thích với bất kỳ ứng dụng Neurosky nào.
Bạn có thể sử dụng các ứng dụng này để tìm hiểu cách kiểm soát sóng não.
HC-05: Sau đó, sử dụng Thẻ HC_05_Bluetooth Lần và tải Arduino của bạn theo cách tương tự như trước đây.
// HC-06-Bluetooth
void setup () {
// Bắt đầu nối tiếp phần cứng.
Nối tiếp.begin (9600); // tốc độ truyền mặc định HC-05
độ trễ (1000);
Số sê-ri ("AT");
độ trễ (1000);
Serial.print ("PHIÊN BẢN AT +");
độ trễ (1000);
Serial.println ("AT + ROLE = 1"); // đặt HC-05 thành chế độ chính
độ trễ (1000);
Serial.println ("AT + LINK =" Chèn địa chỉ của bạn vào đây "); // bây giờ mô-đun sẽ tự động kết nối
độ trễ (1000);
Số sê-ri ("AT + UART = 57600,1,0"); // Đặt baudrate thành 576000
Nối tiếp.begin (57600); //
độ trễ (1000);
}
void loop () {}
Kết nối chân "EN" của HC-05 với Arduino 3v3. Bạn phải viết địa chỉ của mô-đun HC-06 của bạn bằng mã. Kiểm tra địa chỉ mô-đun BT trên điện thoại thông minh Android của bạn. Thay thế ":" (dấu chấm kép) bằng dấu phẩy "," trong mã.
Và bạn phải thay đổi địa chỉ trong mã: 20: 15: 09: 15: 17: 82 = 2015.09.151782 Do đó, mô-đun HC-05 có thể nhận ra địa chỉ.
Điều khiển từ xa
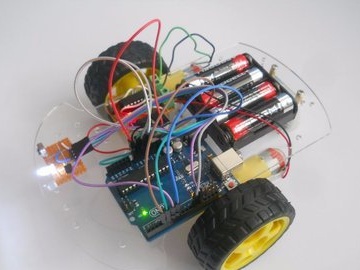
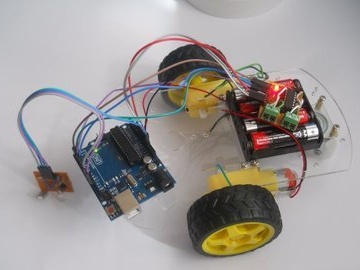
Để tạo ra robot giá rẻ này, một cảm biến hồng ngoại 38 kHz đã được sử dụng, được sử dụng trong điều khiển từ xa của tivi.
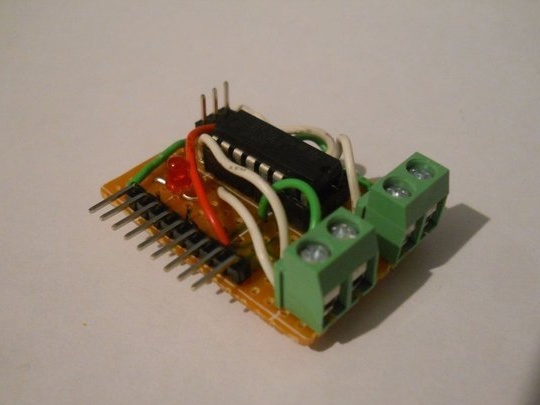
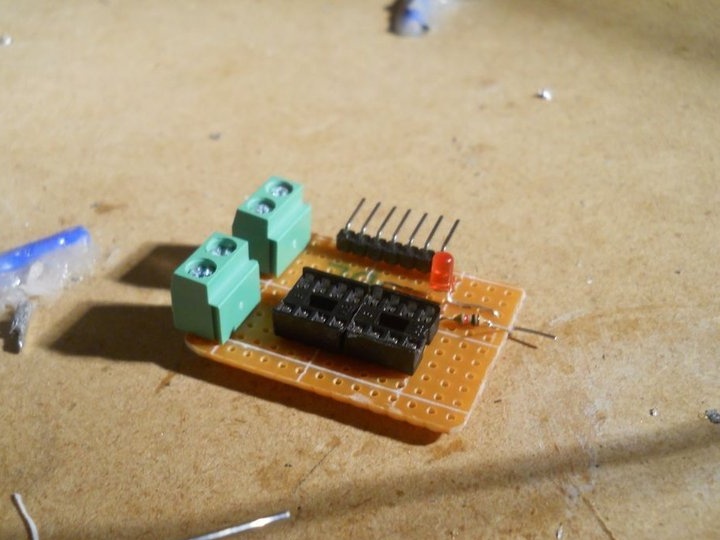
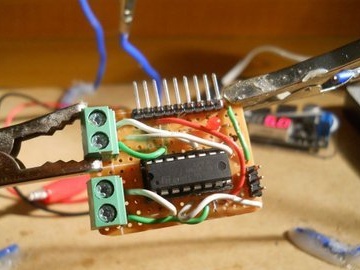
Trình điều khiển động cơ
Sơ đồ ổ đĩa động cơ - Bạn sẽ cần các chi tiết sau:
2 thiết bị đầu cuối trục vít
L293D IC3
Pin tiêu đề (90 độ)
Điện trở 1k
Đèn LED đỏ
Dây điện
Bảng mạch
Sử dụng một số dây đồng và, theo sơ đồ, kết nối các chân microcircuit với các chân kết nối. Không quan trọng chân nào của vi mạch đến chân nào của đầu nối, chỉ cần nhớ nơi bạn kết nối chúng. Đèn LED được kết nối nối tiếp với điện trở và song song với 5 V VCC.
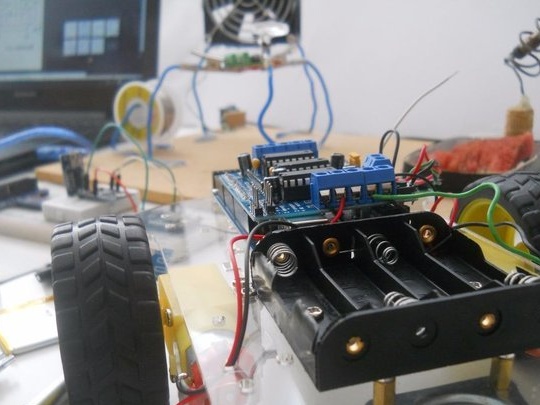
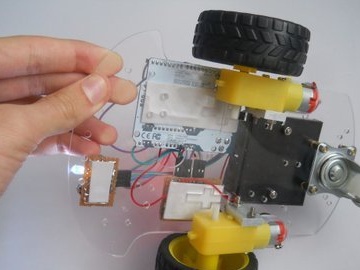
lắp ráp khung gầm
Là một trình điều khiển động cơ điện, chip L293D được sử dụng, có thể điều khiển hai động cơ. Nhìn vào sơ đồ để xây dựng sơ đồ.
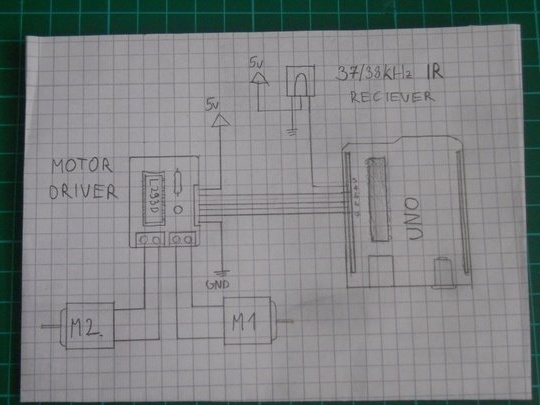
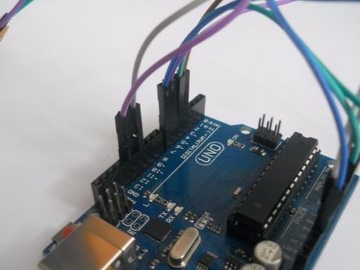
Kết nối các bộ phận với Arduino
Pin Arduino == & gt; lái xe máy
4 == & gt; 15
5 == & gt; 10
6 == & gt; 7
7 == & gt; 2
Số điện thoại == & gt; 85v == & gt; 1, 9, 16
GND == & gt; 4, 5, 13, 12
Vì vậy, hãy nhìn vào sơ đồ mạch của mô-đun L293D, sau đó kết nối các tiếp điểm của nó với Arduino UNO, như được mô tả ở trên. Pin 5v Arduino phải được kết nối với chân 1, 9, 16 để kích hoạt chức năng điều khiển động cơ chip. Sau đó cuối cùng sử dụng các thiết bị đầu cuối vít để bật động cơ.
Thư viện sử dụng IRremote, một mã đọc tín hiệu hồng ngoại 38 kHz, giải mã chúng và sau đó di chuyển robot. (Tải xuống thư viện trong phần "phần mềm").
Có ý kiến trong mã, nhưng điểm mấu chốt là nó giải mã các tín hiệu hồng ngoại đến từ máy chủ chính, sau đó, tùy thuộc vào những gì người dùng muốn, nó bật các động cơ, sau đó robot di chuyển về phía trước hoặc rẽ trái. Tải xuống mã: "Robot_Code". Tải cái này về Arduino của bạn và robot của bạn sẽ sẵn sàng.
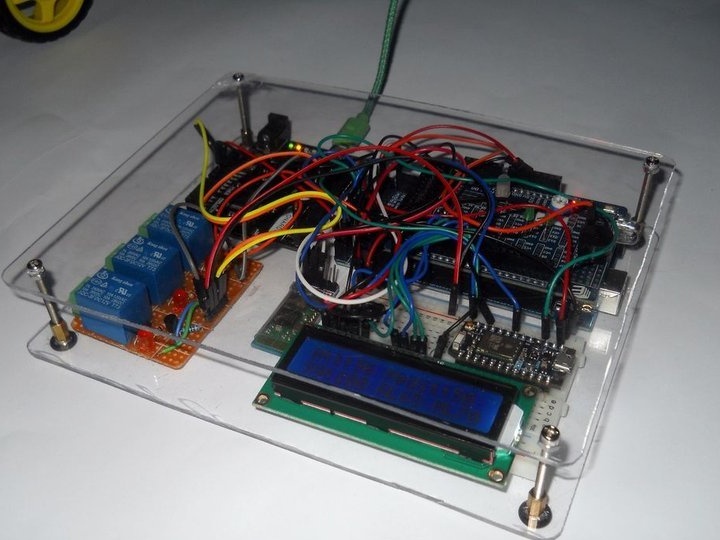
Máy chủ chính (Arduino Mega, Leonardo, Photon)




Máy chủ đọc các gói dữ liệu đến từ tai nghe không dây. Chúng tôi sẽ sử dụng mô-đun BT được cấu hình để cung cấp liên lạc giữa tai nghe và máy chủ. Arduino Mega là bộ não của toàn bộ mạch, mọi thứ được kết nối với vi điều khiển này: Bluetooth, đèn LED phát hồng ngoại, máy chủ web và bộ điều khiển chuột. Mã này hơi phức tạp, nhưng theo quy định, nó có ý kiến để hiểu.
Nhà ở
Mọi thứ đều đơn giản. Hai tấm mica 18x15 cm, làm mịn các cạnh bằng giấy nhám. Một số ốc vít để kết nối chúng với nhau.
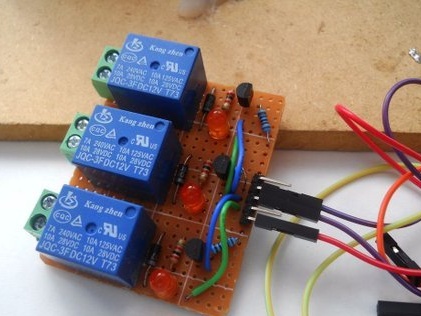
Bảng tiếp sức
Bạn sẽ cần các chi tiết sau:
Transitor 2n2222 (3 chiếc)
điốt Germanium (3 chiếc)
Điện trở 330 ohm (3 chiếc.)
Điện trở 1 kOhm (3 chiếc.)
Rơle 5 V (3 chiếc.)
kết nối pin
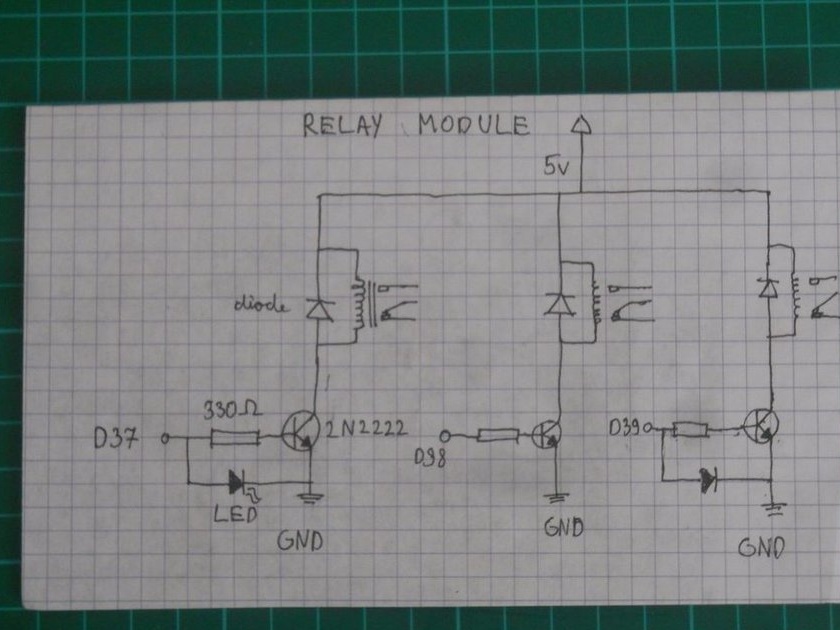
Bảng mạch
Một hình ảnh có giá trị hơn một ngàn từ, vì vậy hãy nhìn vào sơ đồ về cách kết nối các bộ phận trên bảng mạch in.
Nếu đầu ra của Tín hiệu Lát là từ Arduino, rơle sẽ bật. Các bóng bán dẫn khuếch đại tín hiệu để cung cấp đủ năng lượng cho rơle. Chúng tôi sẽ sử dụng các liên hệ 37-38-39 để kiểm soát mức THẤP CAO của mỗi rơle.
Để cài đặt các bộ phận trên vỏ mica, tác giả đã sử dụng băng keo hai mặt. Anh ấy nắm giữ khá nhiều chi tiết.
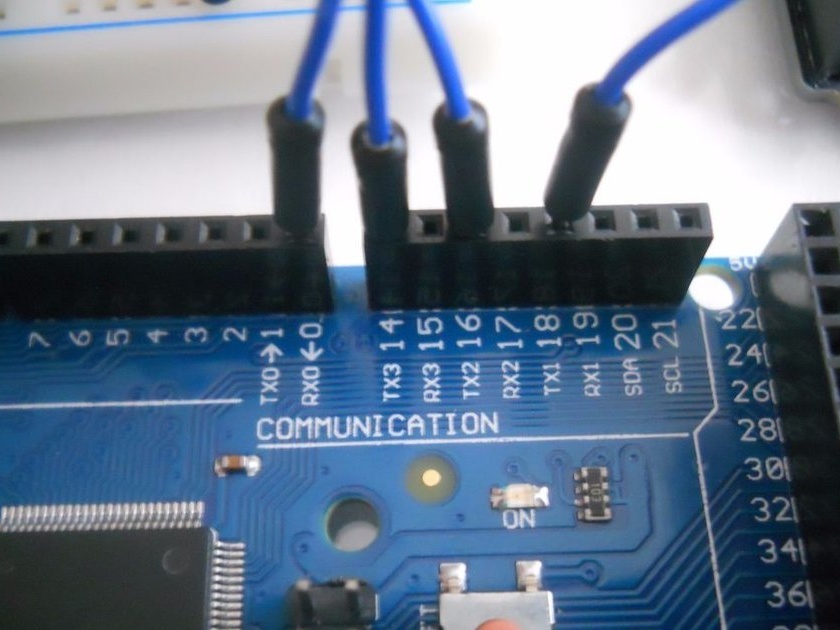
Đây là một máy chủ phần mềm, vì vậy việc tạo ra một mạch không quá khó. Bạn chỉ cần bật vi điều khiển và thiết lập kết nối giữa chúng. Đèn LED IR được kết nối với chân D3 và rơle được kết nối với 37-38-39. D16 Arduino Mega đi đến RX Photon và D18 tới RX Leonardo.
Kết nối robot
[2.02 Kb] (tải xuống: 14)
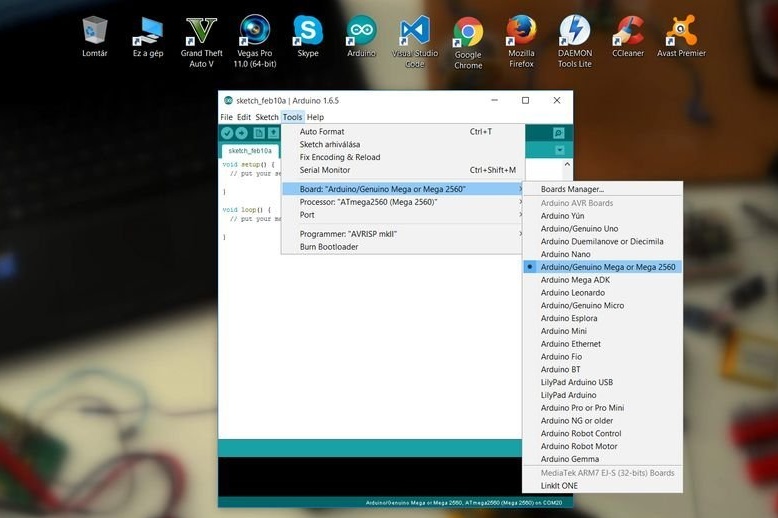
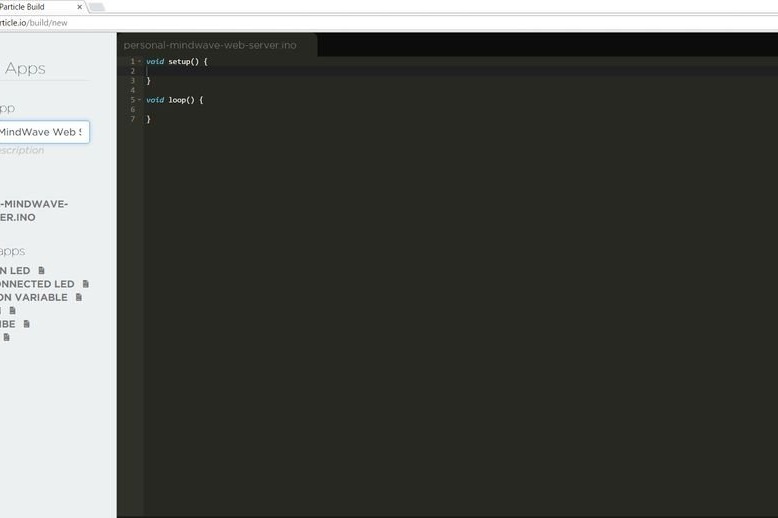
Nhưng bây giờ mã đã sẵn sàng và hoạt động, vì vậy bạn chỉ cần tải xuống bộ vi điều khiển của mình. Tải xuống tệp .ino hoặc sao chép / dán mã vào IDE của bạn và sử dụng nó. Mã cho Hạt Photon phải được tải xuống thông qua IDE trình duyệt. Để làm điều này, đăng ký tại. Và kết nối máy tính xách tay của bạn với vi điều khiển của bạn. Mọi thứ diễn ra gần như tự động, chỉ cần thêm ID thiết bị của bạn.
Trước khi tải xuống mã, đảm bảo rằng không có gì được kết nối với các chân RX / TX. Vì vậy, hãy ngắt kết nối mô-đun Bluetooth của bạn khỏi Mega và ngắt kết nối Mega khỏi Leonardo và Photon.
[489 b] (tải xuống: 15)

Máy chủ webĐể thêm chức năng IoT (Internet of Things) vào dự án của mình, tác giả đã tạo một bộ ghi dữ liệu trực tuyến bằng Particle Photon. Tùy thuộc vào những gì bạn làm với thiết bị, Photon tạo một máy chủ cá nhân và ghi dữ liệu lên đám mây.Điều này có vẻ đáng sợ lúc đầu, nhưng hãy tưởng tượng rằng bạn có thể xác định nếu bạn bị căng thẳng (mức độ chú ý tăng và giảm nhanh chóng) hoặc nó đáng để đi ngủ
(mức thiền luôn trên 80)
. Máy chủ web này có thể giúp bạn sống khỏe mạnh hơn.
Mã hóa trình duyệt
Particle cũng có một bảng điều khiển trực tuyến nơi bạn có thể xuất bản bất kỳ dữ liệu nào bằng cách sử dụng Part Part Part.publish (); cú pháp. Các nhà phát triển thanh công cụ đã tiết kiệm rất nhiều thời gian cho người dùng.
