




Nhiều người đã nghe hoặc thấy đôi tai thông minh của "necomimi". Đôi tai như vậy phản ứng với tâm trạng của chủ sở hữu và, tùy thuộc vào nó, phản ứng. Nguyên lý hoạt động của một thiết bị như vậy dựa trên việc giải mã hoạt động của não người. Một thiết bị như vậy có giá khoảng 6000 tr.
Thuật sĩ quyết định làm một thiết bị tương tự. Đúng, tai mèo như vậy được điều khiển bằng một nút, nhưng giá của chúng là một mức độ thấp hơn. Nhân tiện, đôi tai không chỉ là của mèo, mà bất kỳ, trí tưởng tượng của bạn là bao nhiêu là đủ.
Chúng ta hãy xem một video với một ví dụ về hoạt động của một thiết bị như vậy.
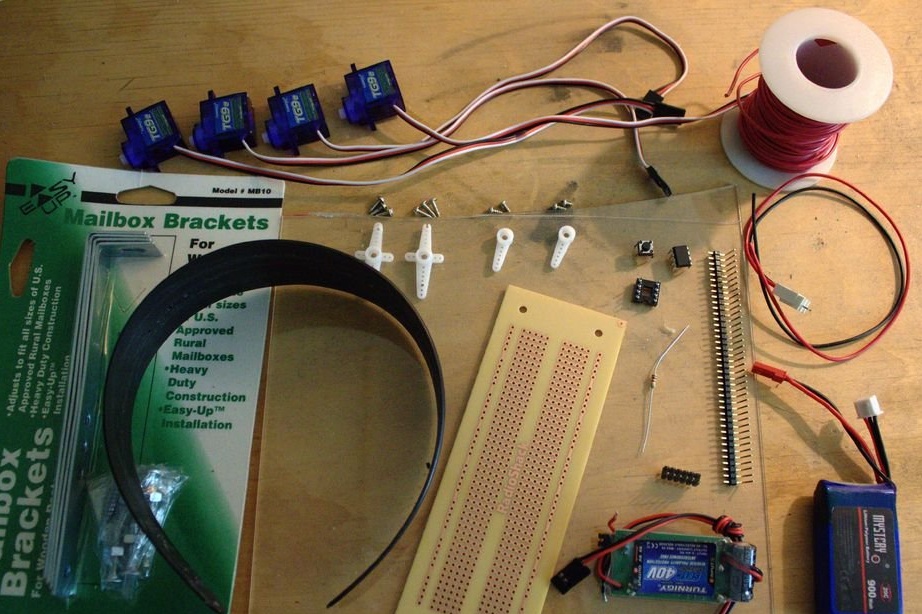
Để làm cho đôi tai hoạt hình như vậy, chủ cần có những điều sau đây
Dụng cụ và vật liệu:
Súng -Gue;
-Drasher;
-Một tuốc nơ vít;
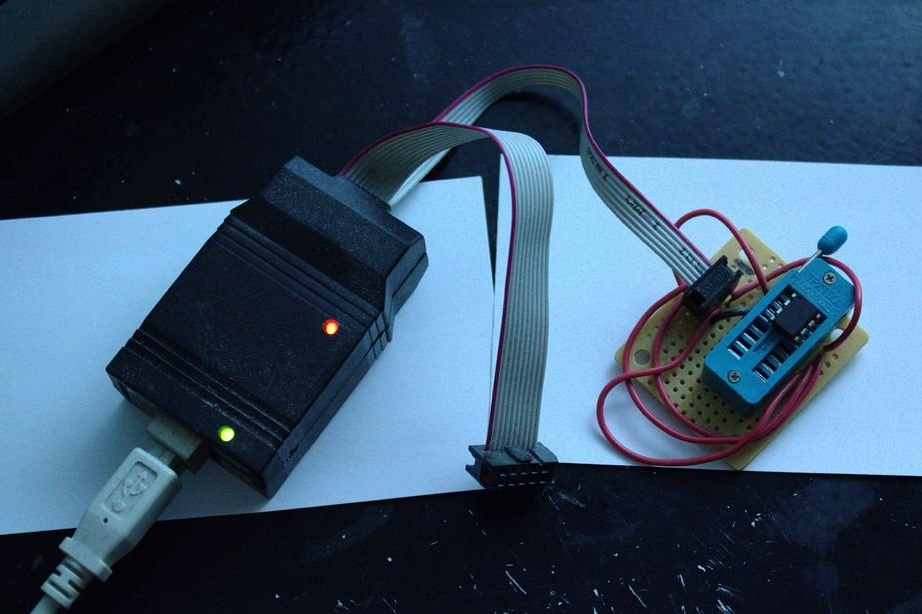
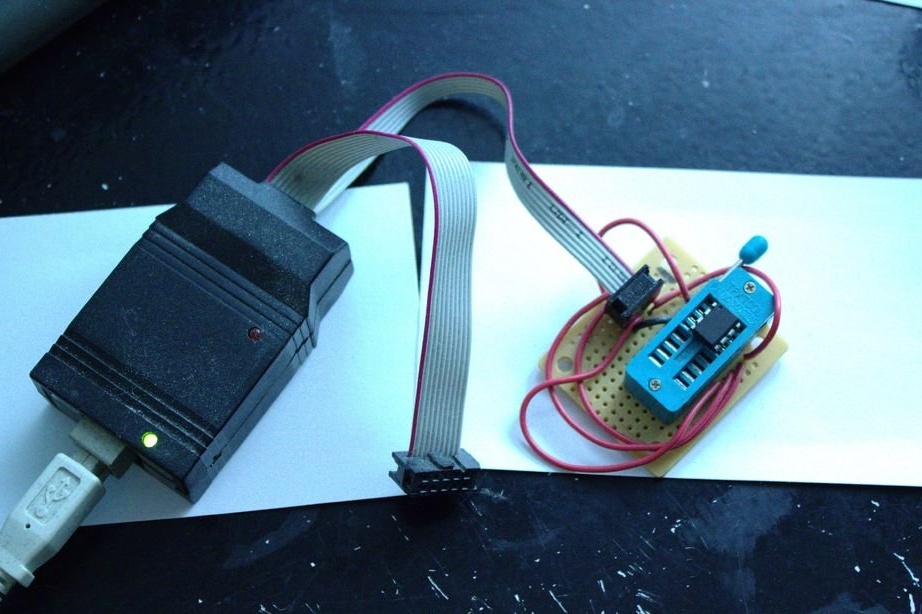
-USB-lập trình viên cho AVR;
-Chủ vụ;
Phụ kiện -Soldering;
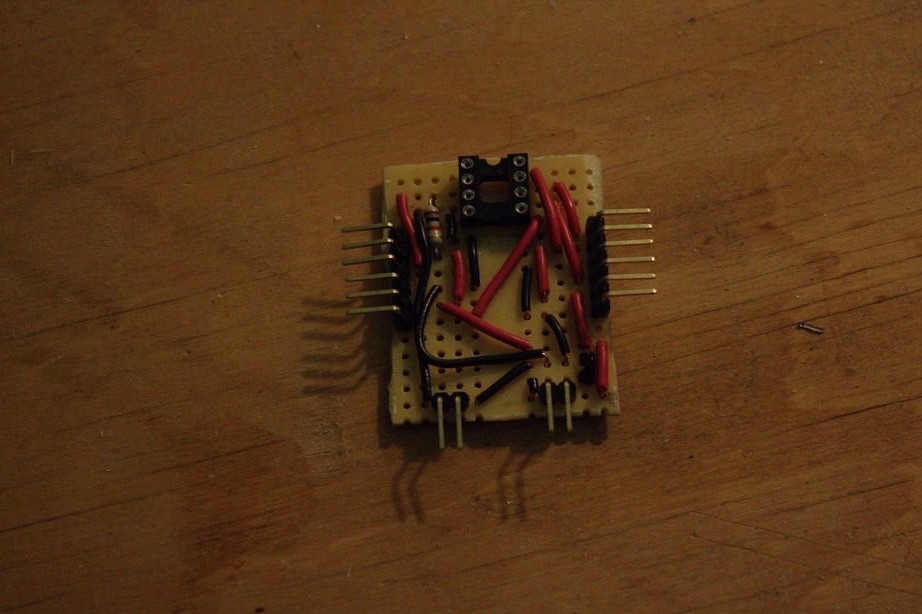
Vi điều khiển ATTiny13;
- Servo-4 chiếc.;
-Wire;
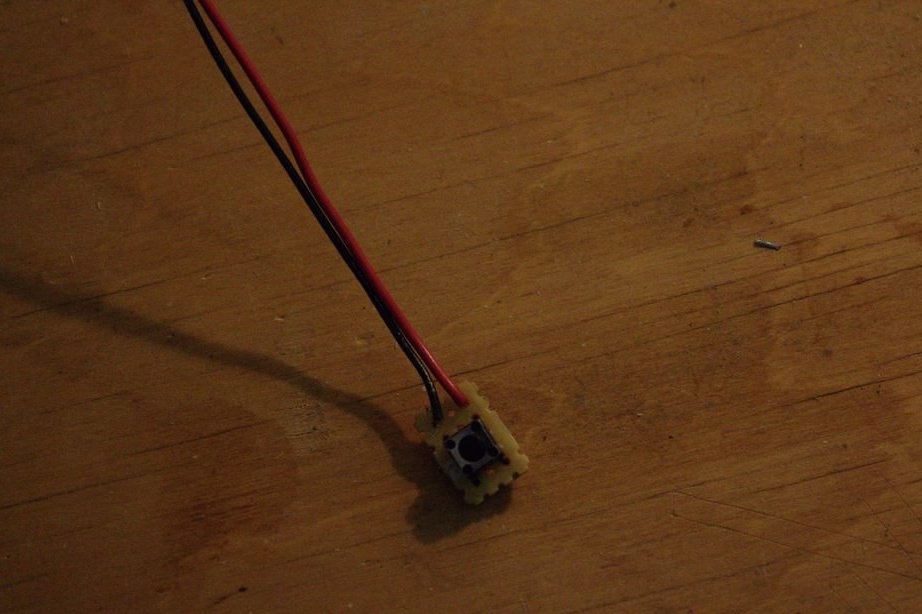
-Nhấn nút;
- Điện trở 1 kOhm;
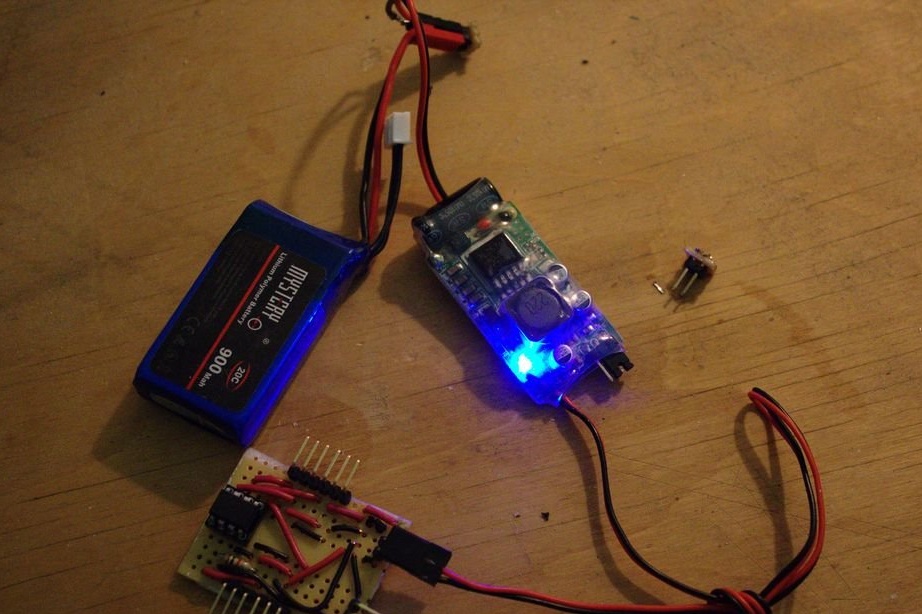
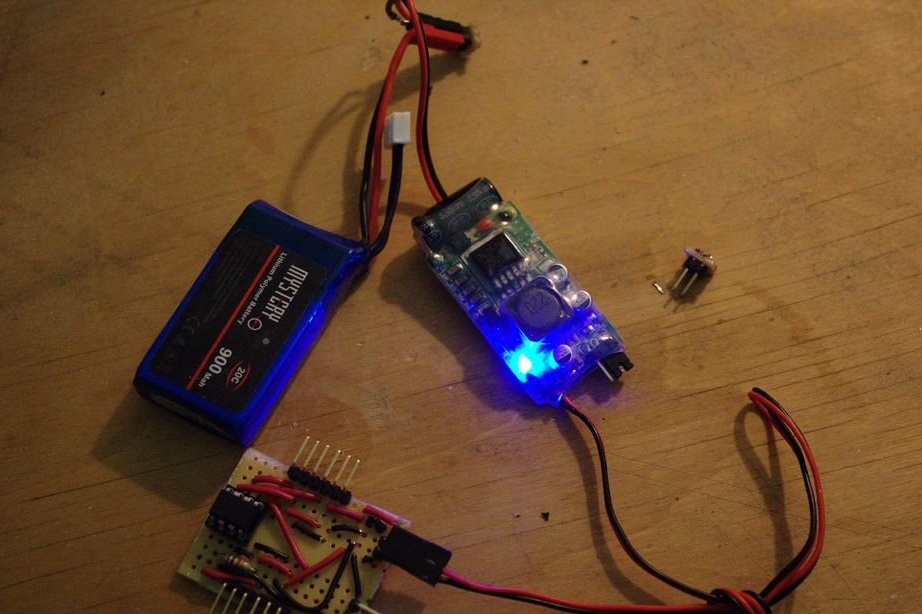
-Lithium polymer pin 800 mAh;
-Cung cấp điện;
Viền beplastic;
-Fur có màu đen ,, trắng;
-Acryl;
-Gue;
-Sách máy;
-Izolenta;
-Mặt giấy;
-Giấy;
- kéo;
-Đọc;






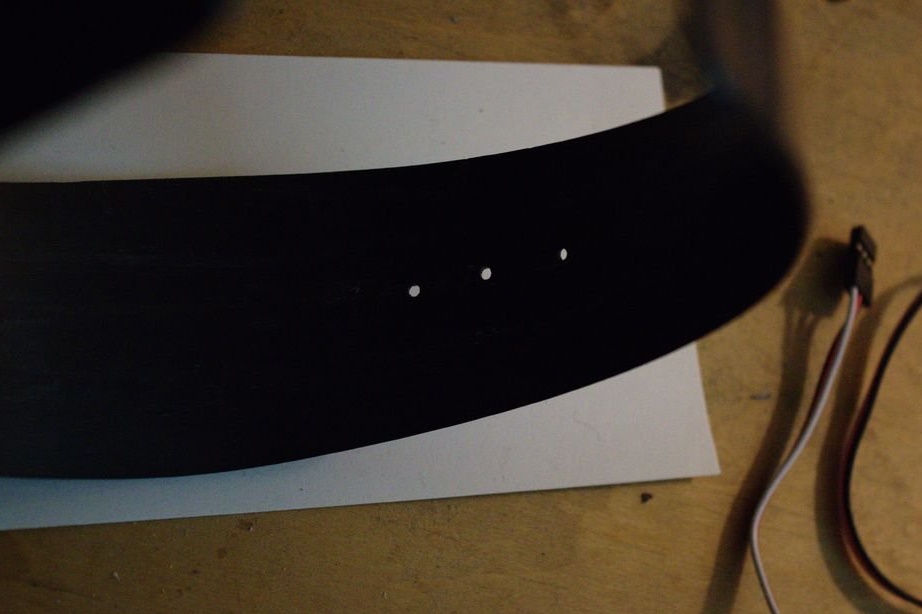
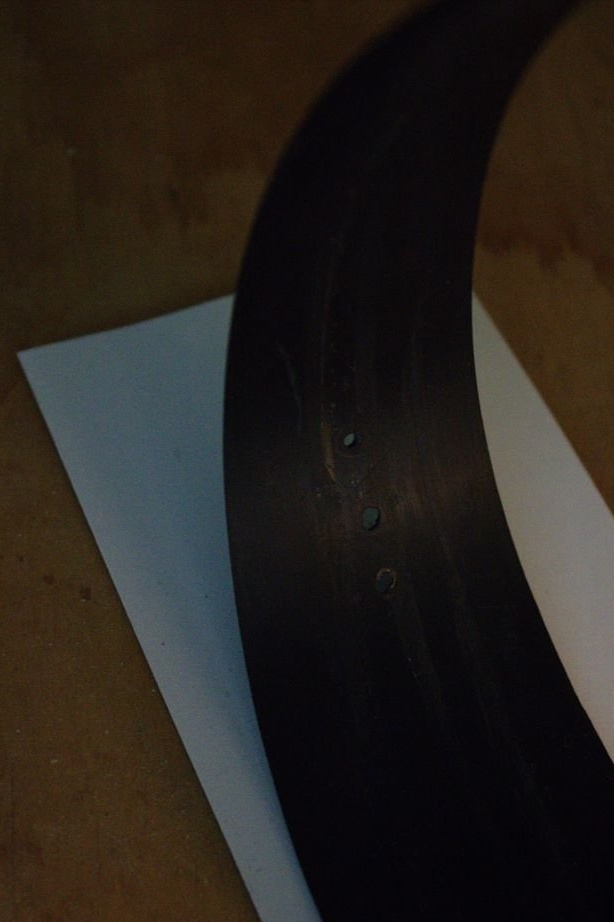
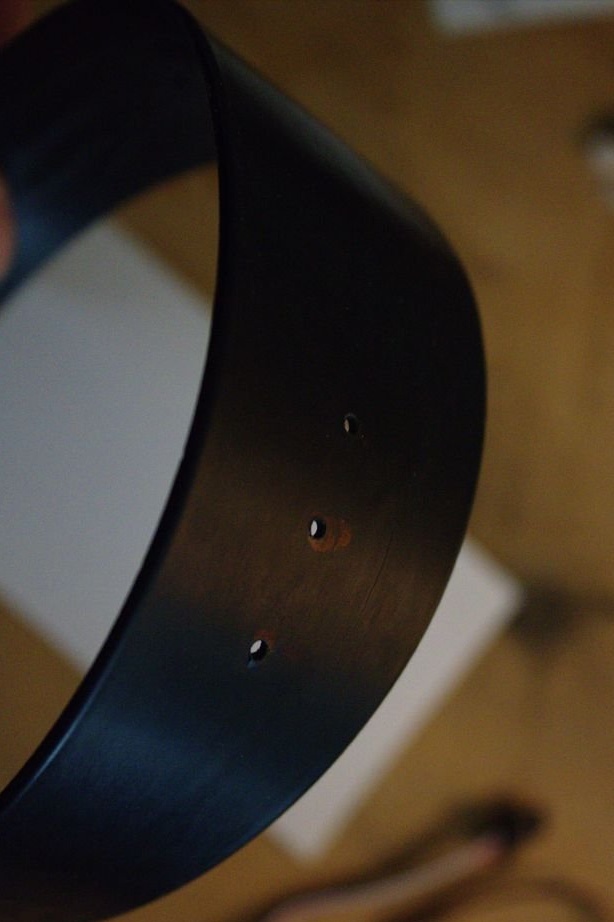
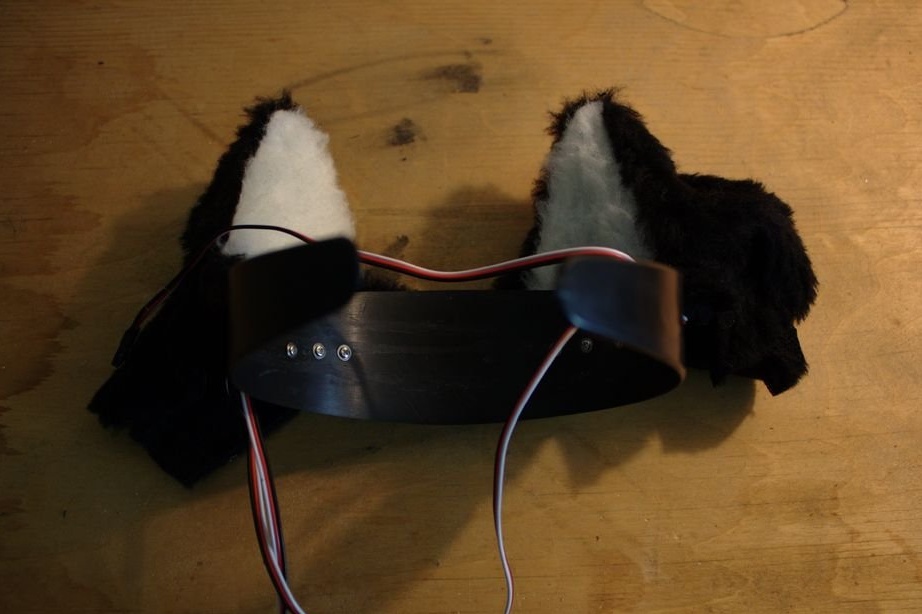
Bước một: Vòng bezel
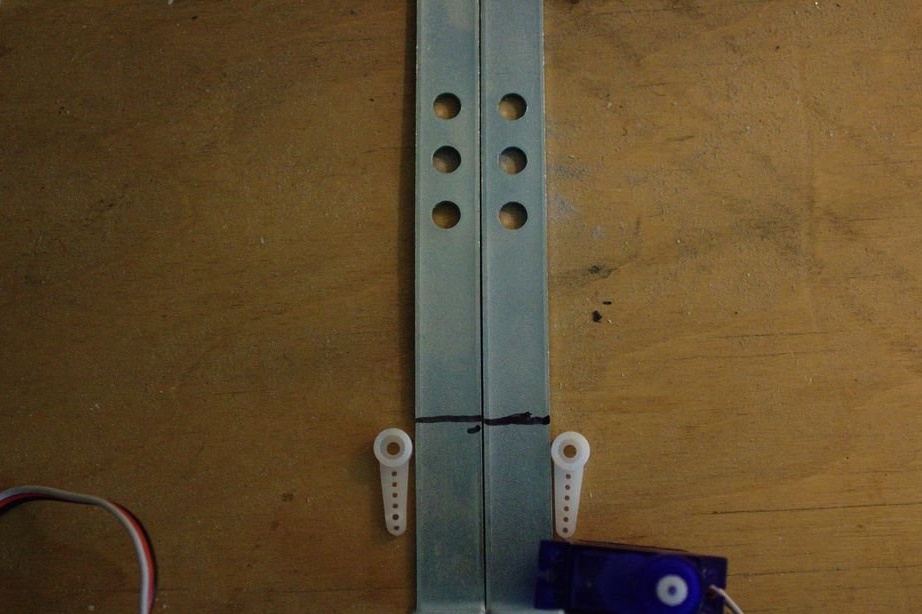
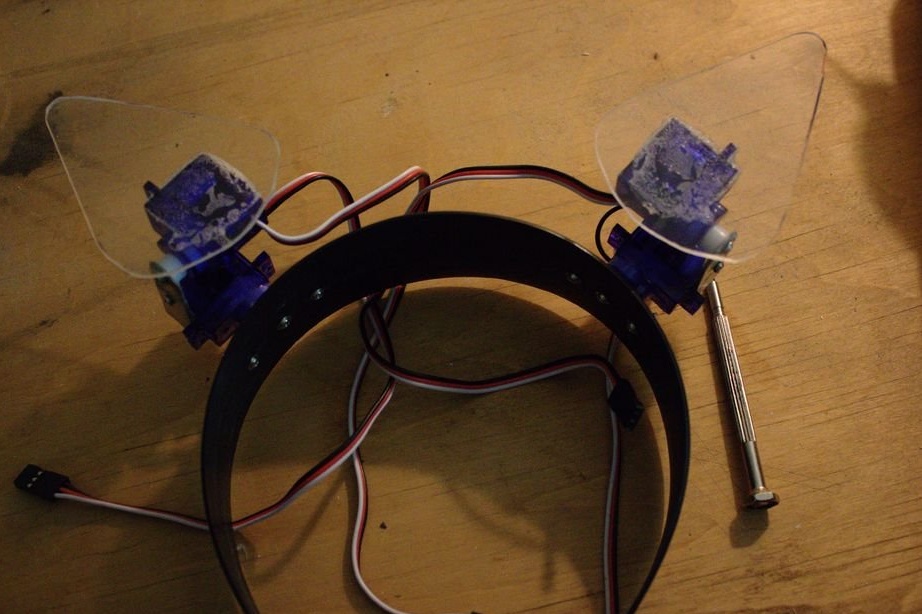
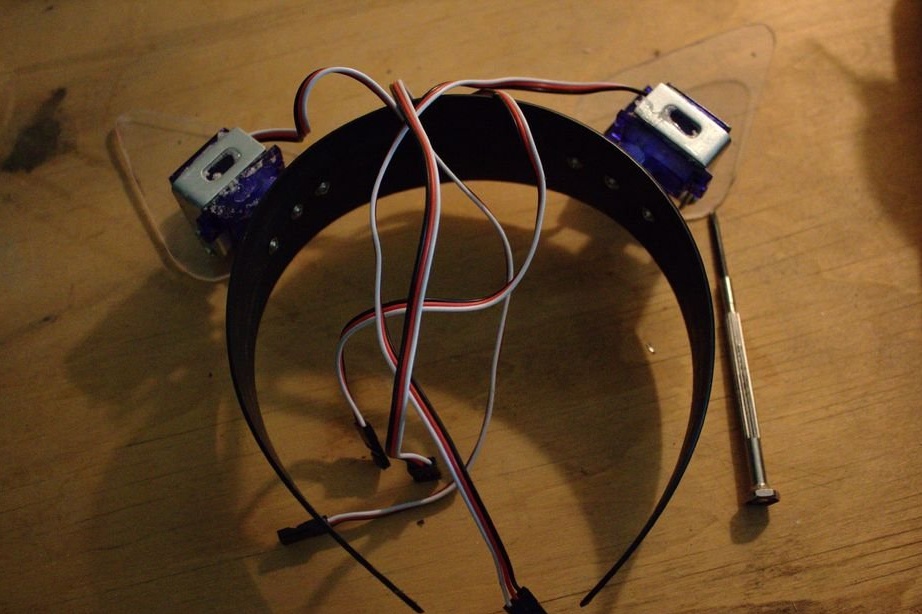
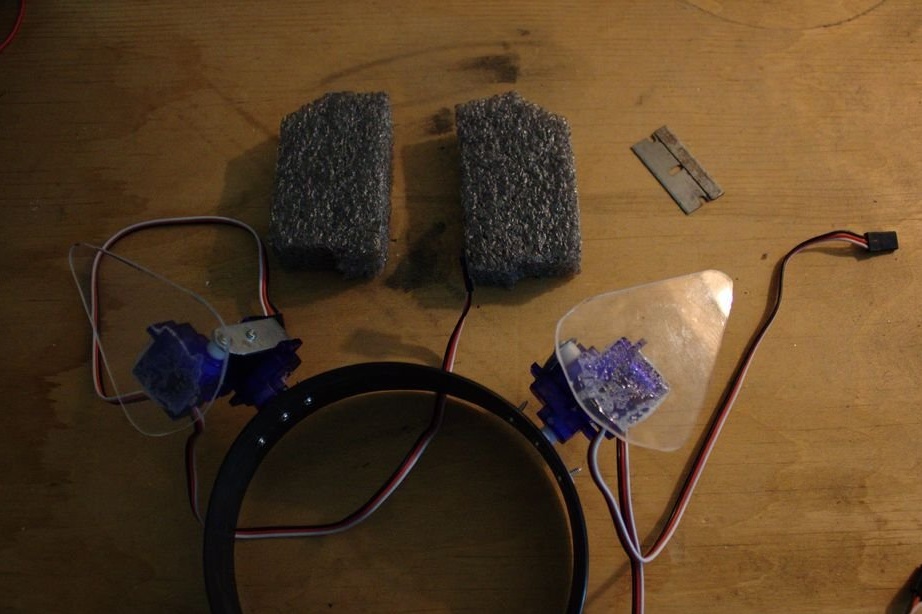
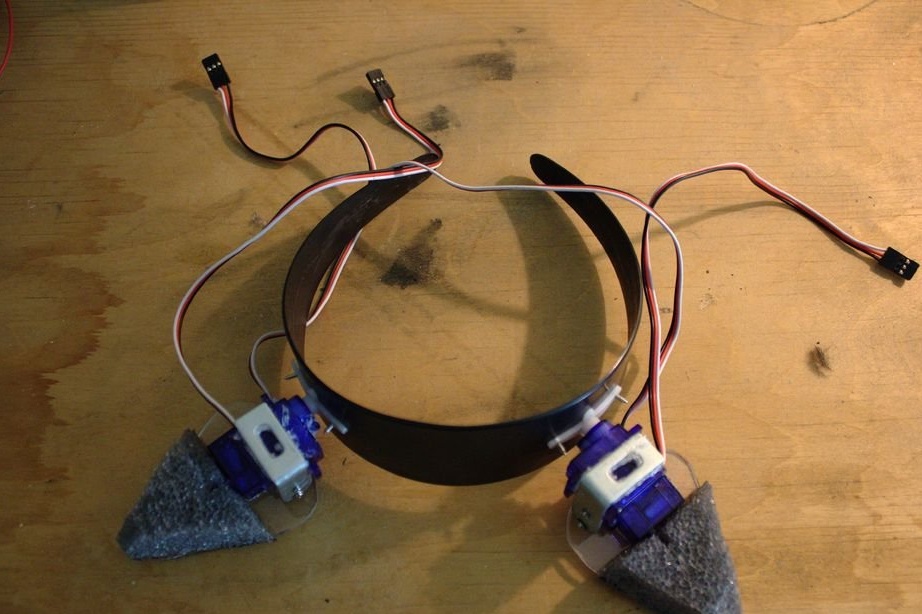
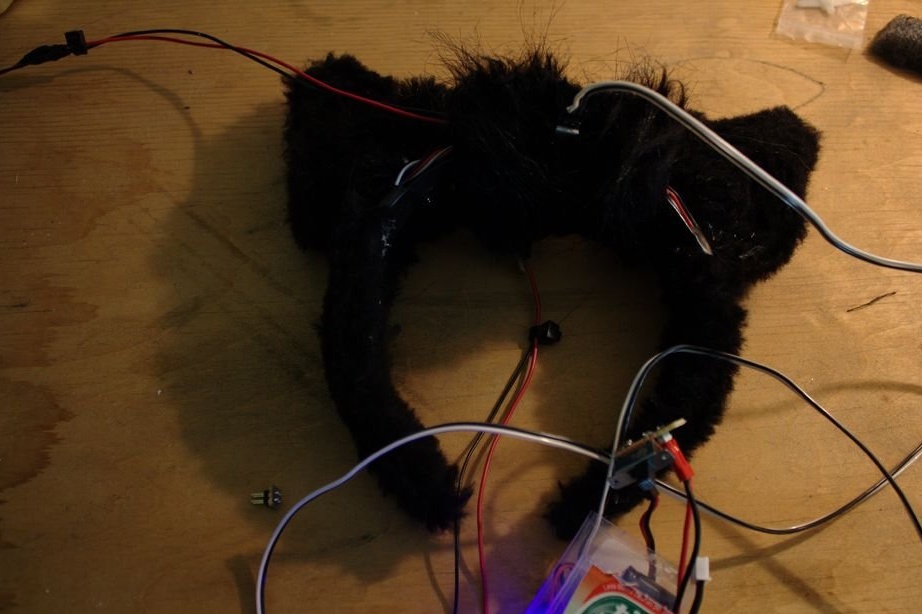
Đối với cơ sở, chủ lấy dải tóc. Viền phải đủ cứng. Đầu tiên, trình hướng dẫn đánh dấu các vị trí cài đặt của các servo. Chỉ có bốn servo. Hai chịu trách nhiệm di chuyển trái / phải và được gắn trực tiếp vào vành, hai có trách nhiệm di chuyển lên / xuống và được gắn vào các servo đầu tiên. Các servo đầu tiên được gắn vào vành bằng cách sử dụng tấm gắn với trục xuống, tức là servo sẽ di chuyển, không phải trục. Bậc thầy cài đặt một tấm gắn trên ổ đĩa servo và đánh dấu ba lỗ ở mỗi bên trên vành.
Tiếp theo, bạn cần sửa chữa servo để đảm bảo rằng thân của nó không bắt được vành trong khi quay.

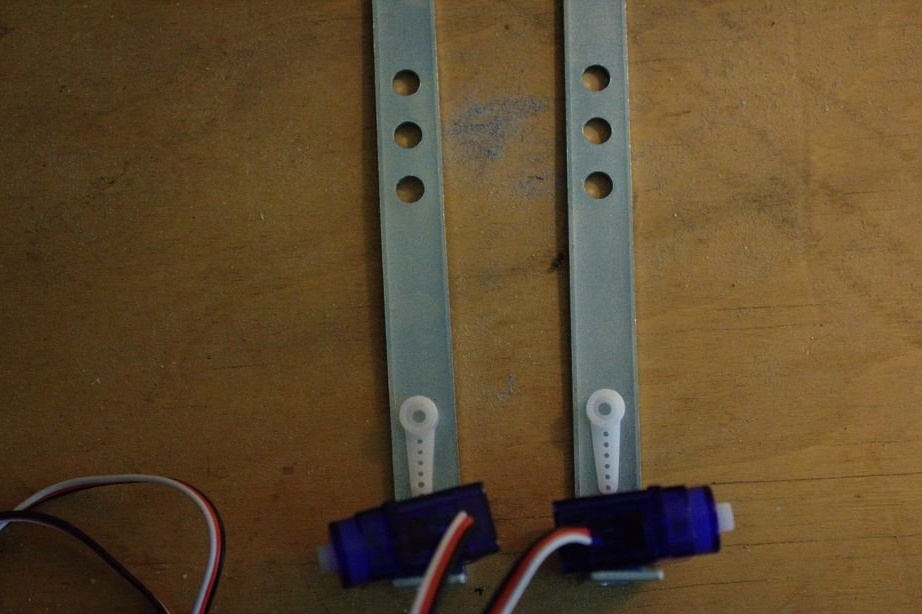
Bước hai: Gắn kết
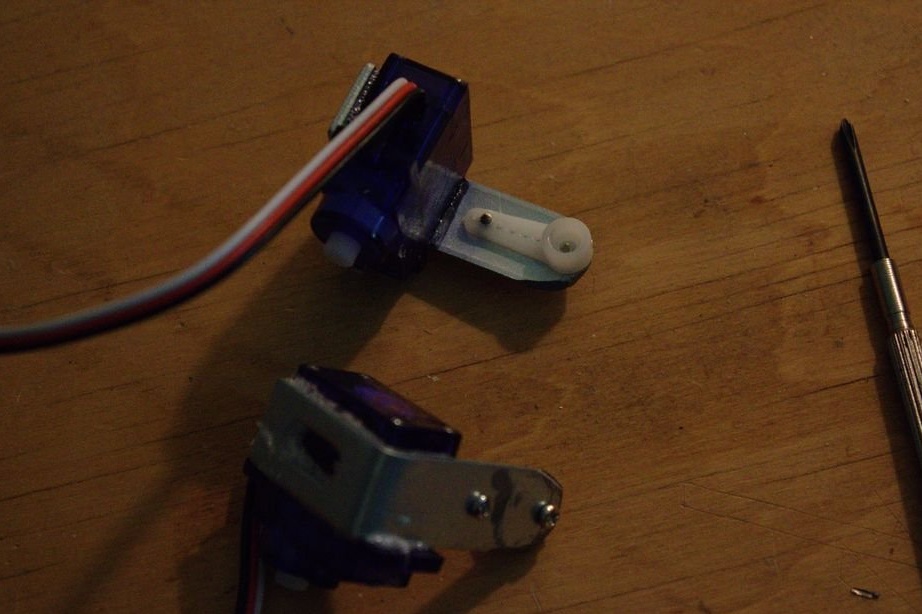
Bây giờ bạn cần phải tạo ra một gắn kết cho các servo thứ hai. Chủ nhân của anh ta làm từ khung gắn. Đánh dấu và cắt chiều dài mong muốn. Khoan lỗ. Dán góc vào ổ đĩa.






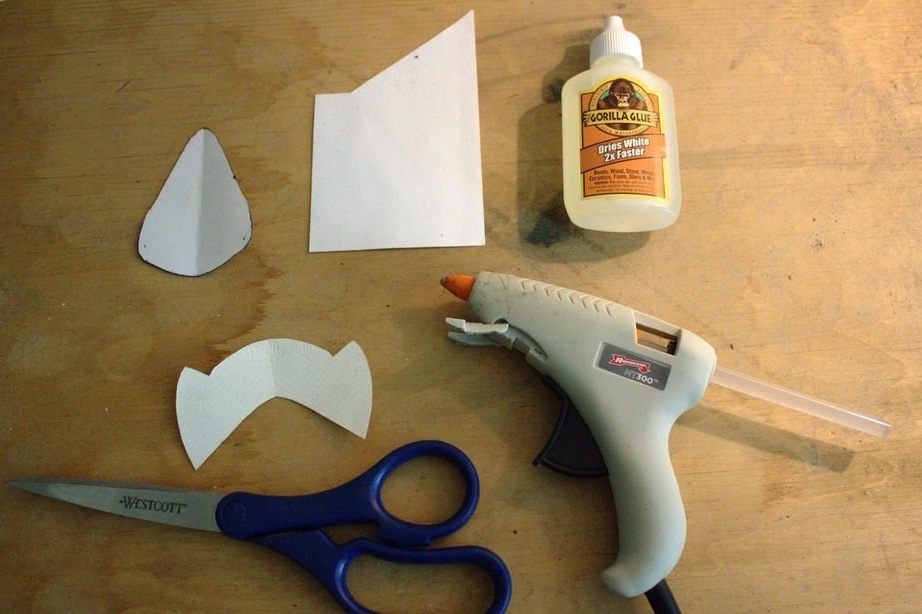
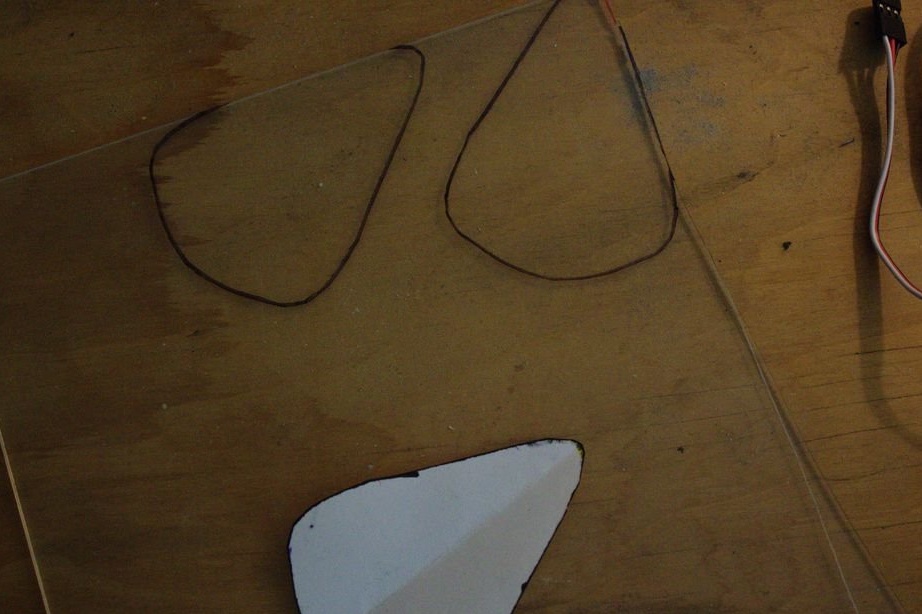
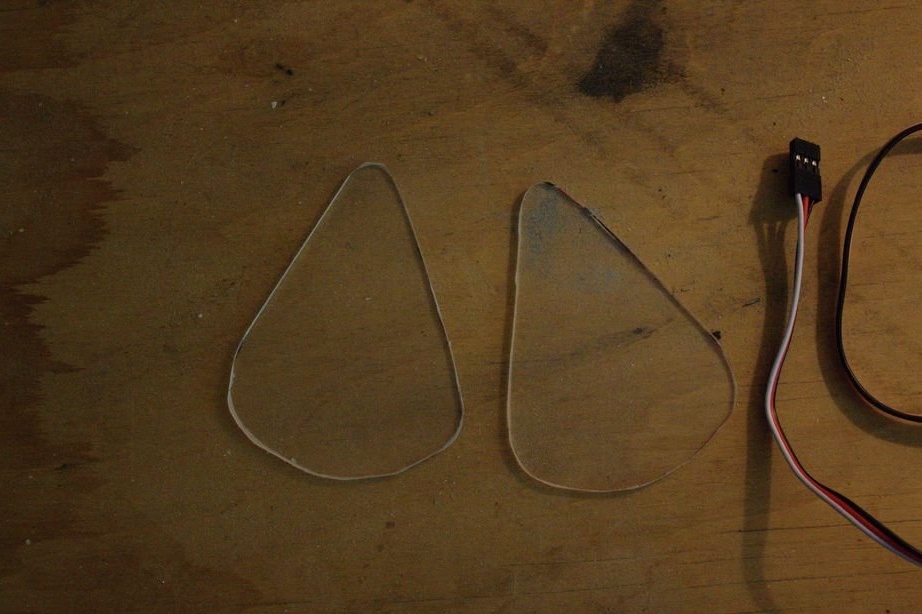
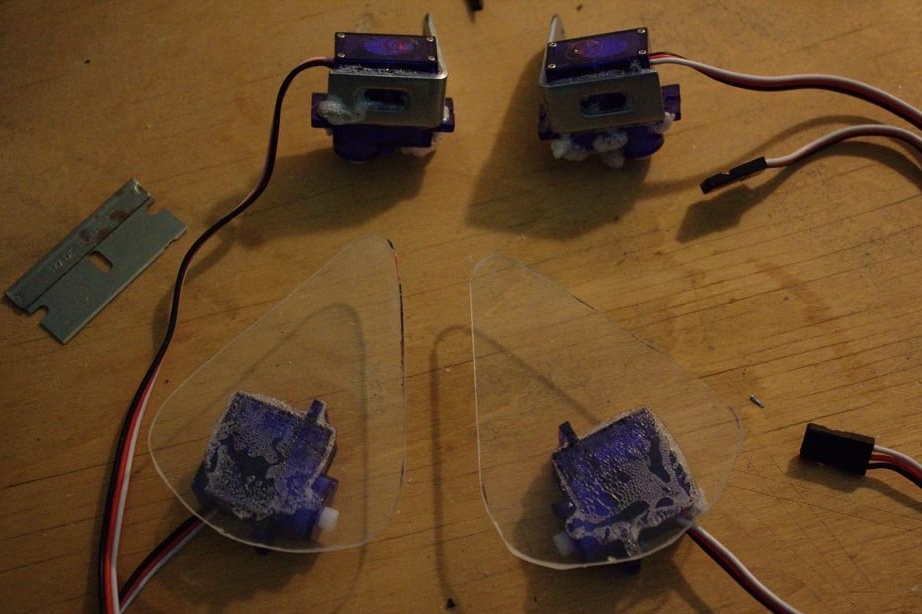
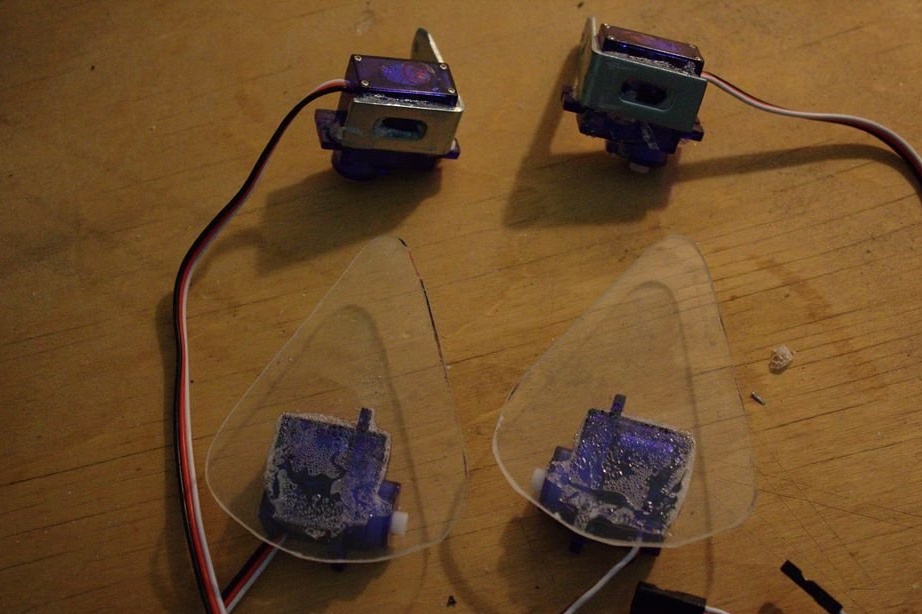
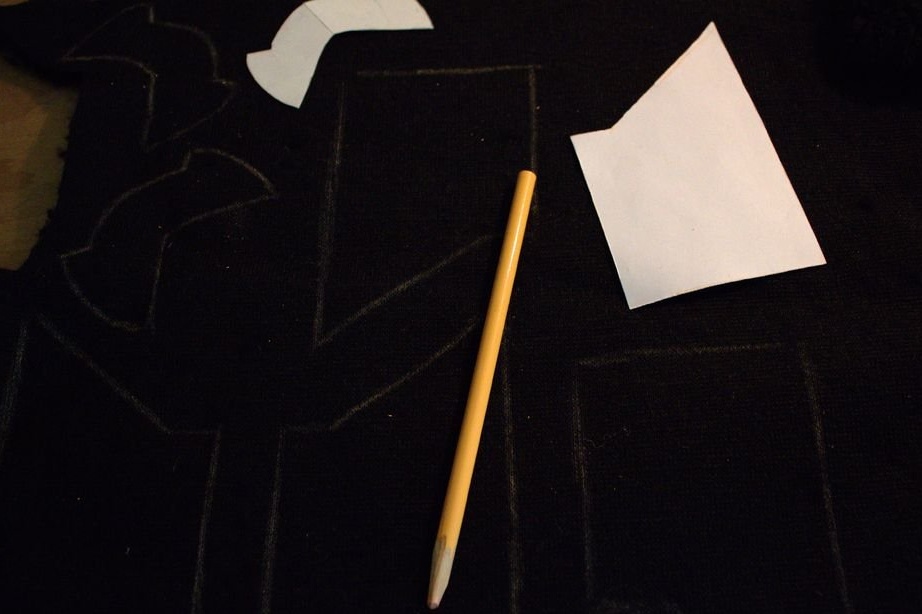
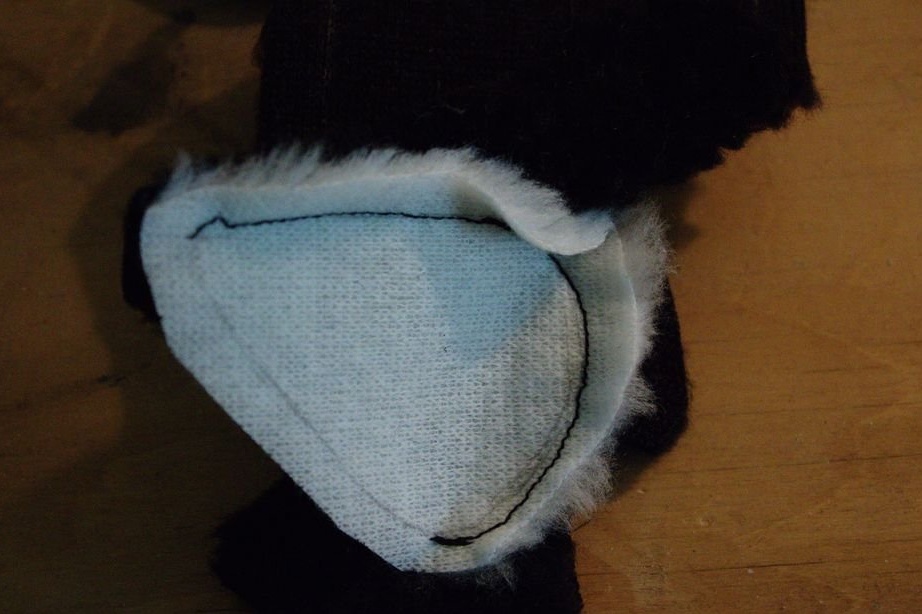
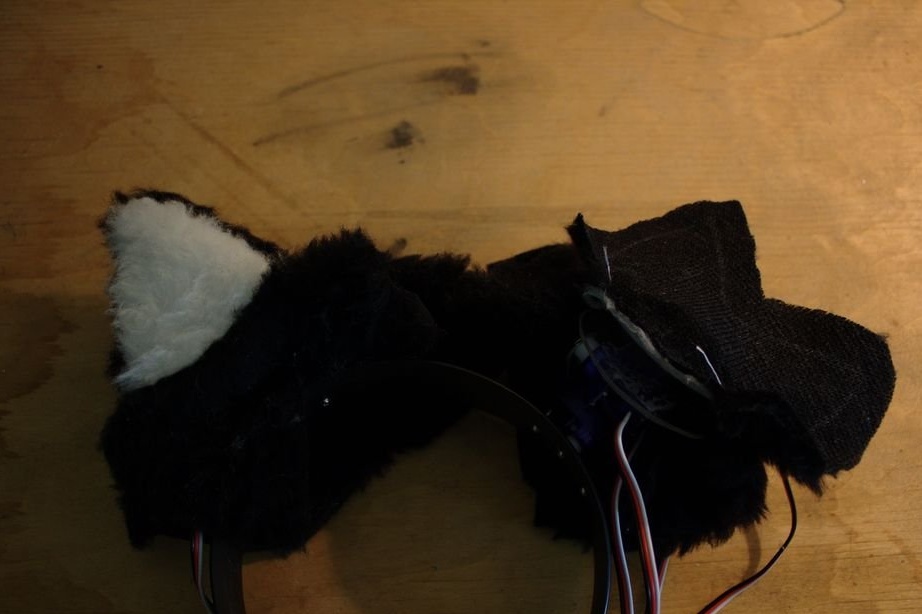
Bước ba: Tai cơ sở
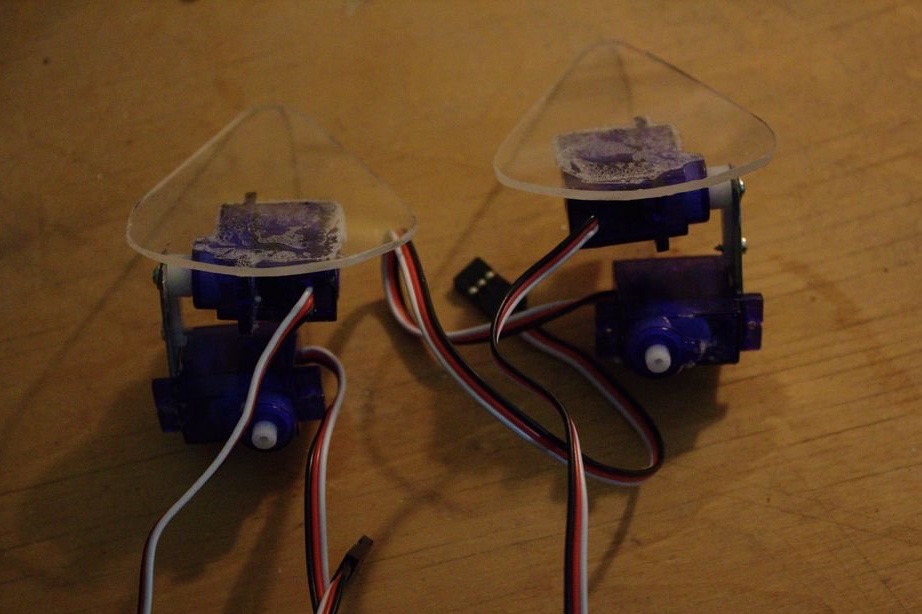
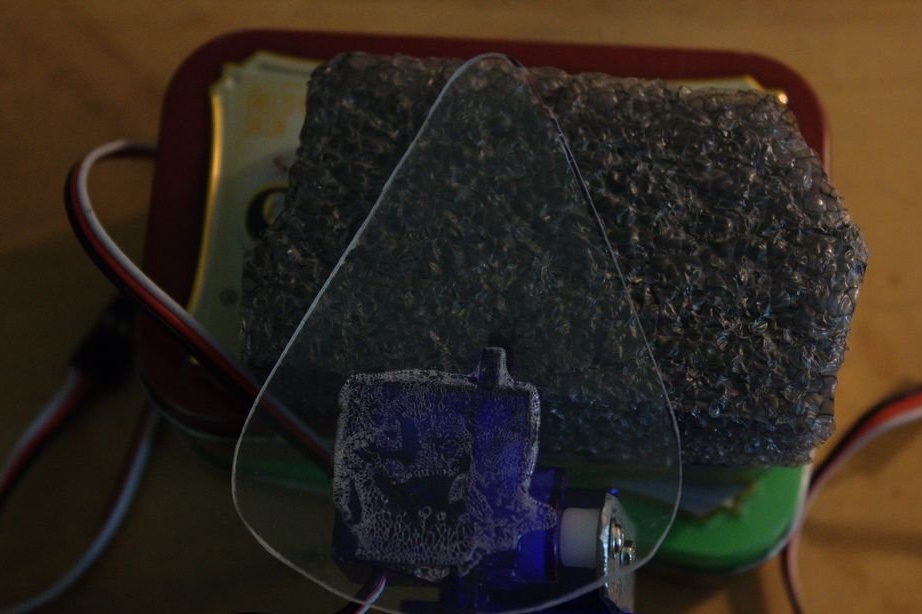
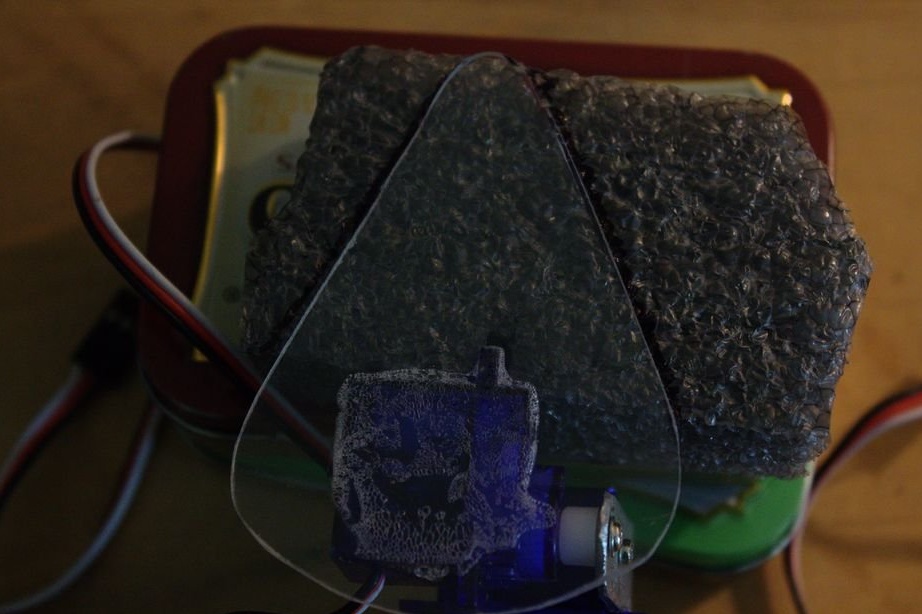
Cắt ra một mẫu giấy. Theo mô hình, nó cắt ra khỏi tai từ acrylic.Dán chân đế vào servo thứ hai (lên / xuống). Khi thực hiện thao tác này, bạn phải đảm bảo rằng các chân đế sẽ không chạm vào các bộ phận khác của thiết bị và chỉ sau đó dán chúng.


Bước bốn: Cài đặt
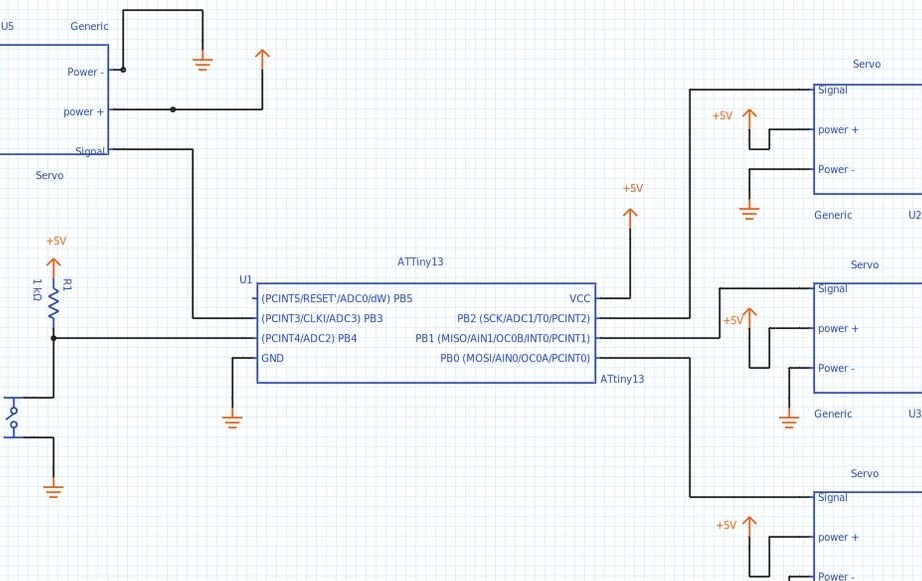
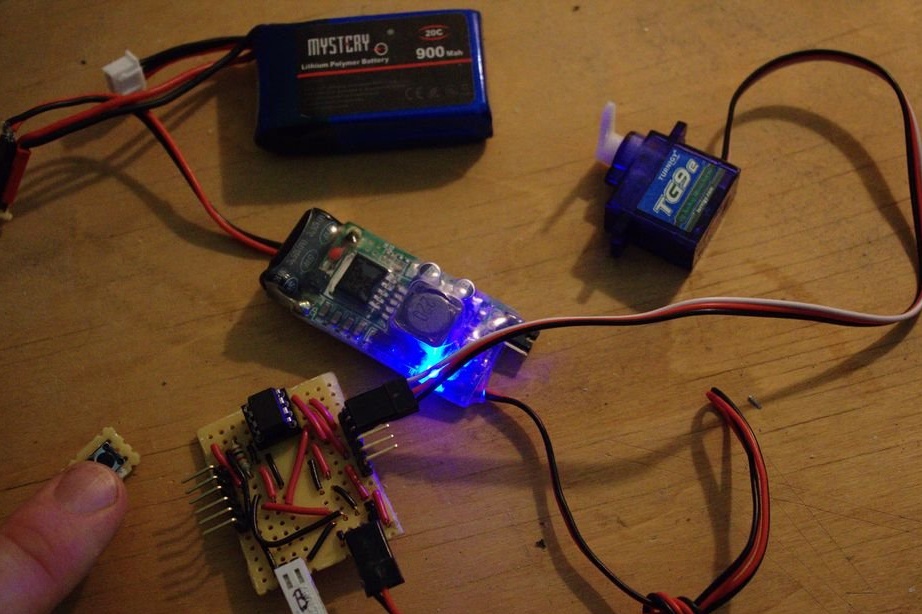
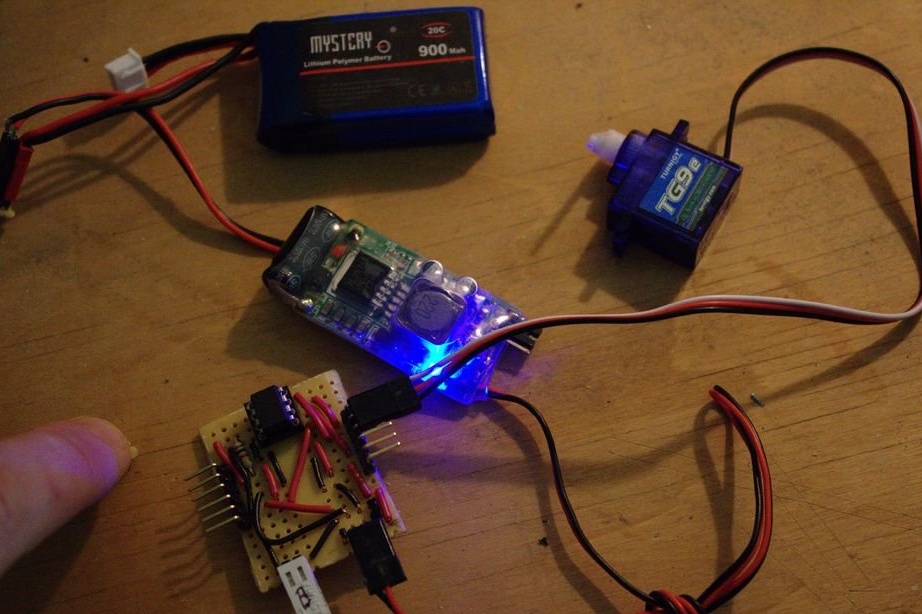
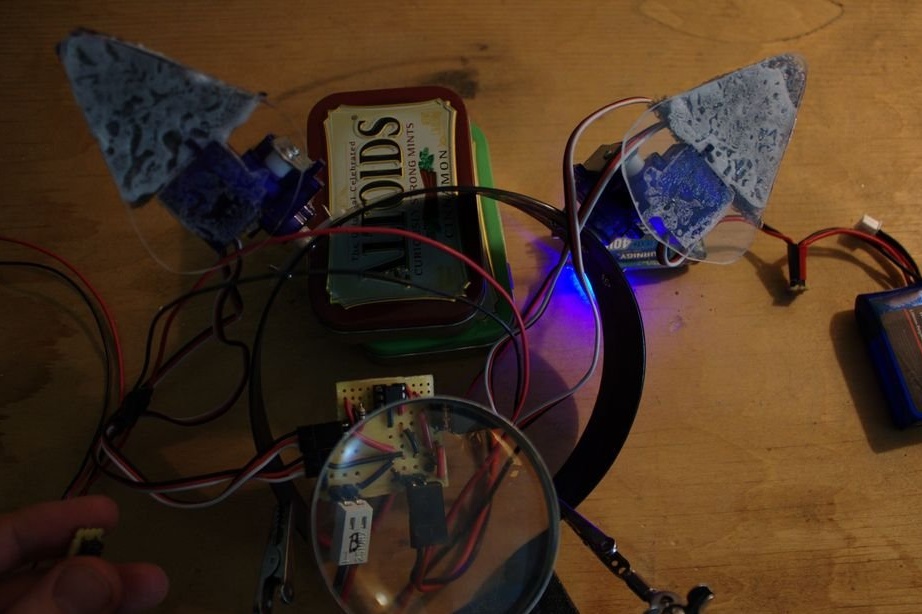
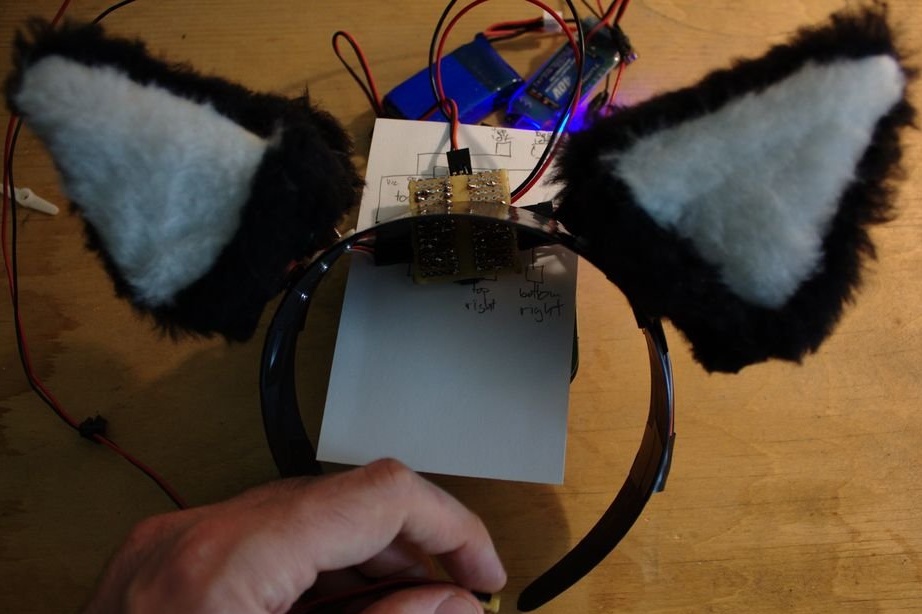
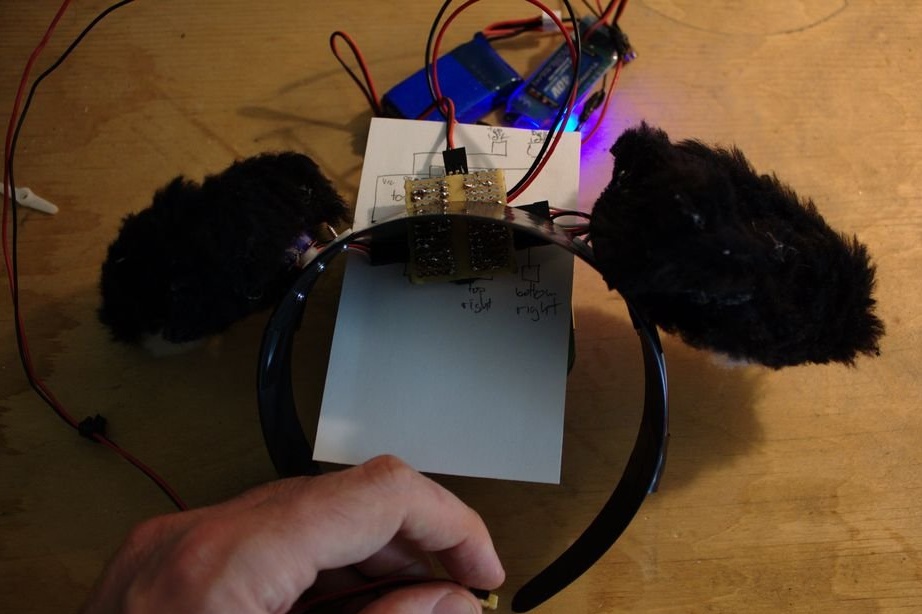
Thực hiện cài đặt theo sơ đồ. Các vi điều khiển gắn trên một bảng mạch. Nó cũng gắn các đầu nối cho các thiết bị ngoại vi, sáu ở mỗi bên cho các ổ servo, hai cho một nút bên ngoài và hai cho nguồn điện. Các microswitch gắn trên một bảng mạch riêng. Nút sẽ ở xa và dây phải dài.
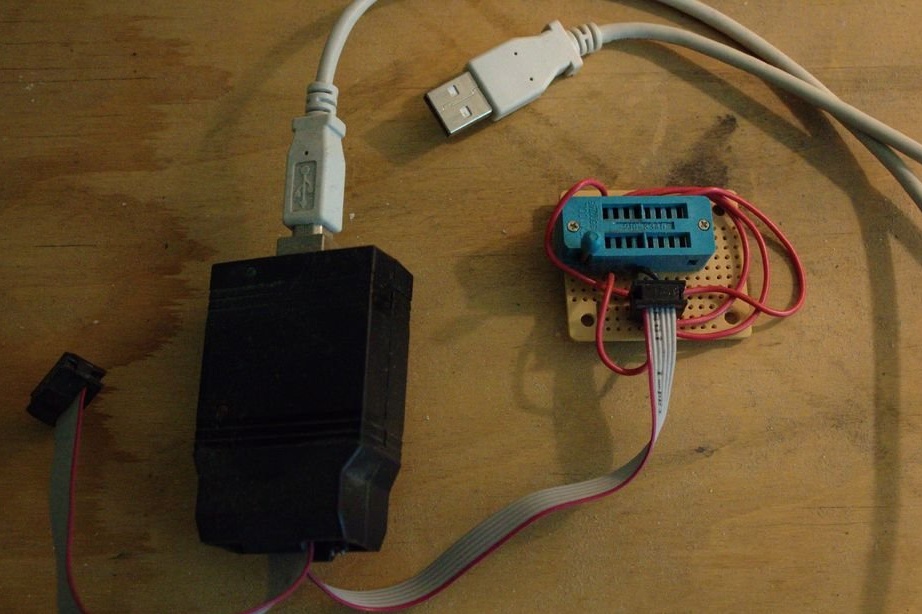
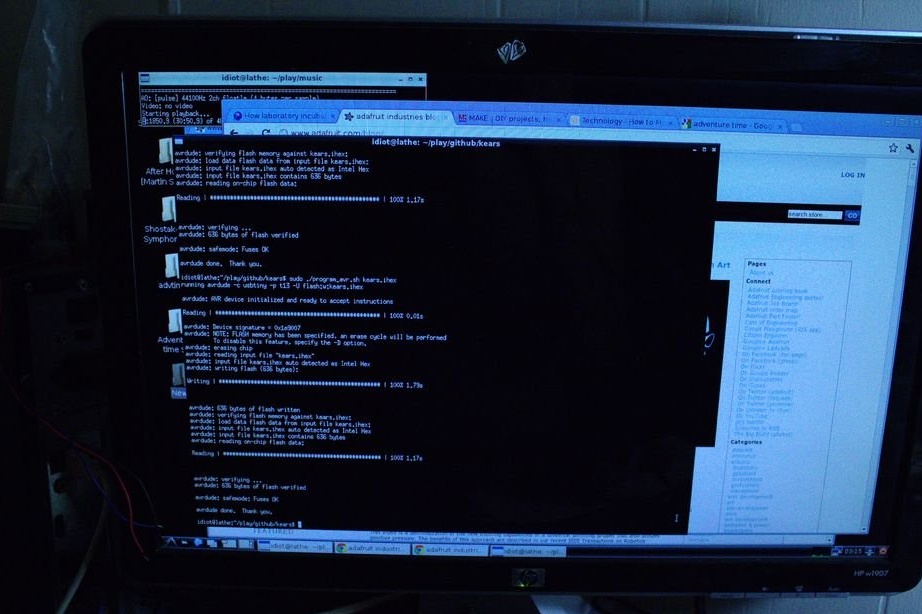
Bước năm: Lập trình
Bây giờ bạn có thể lập trình vi điều khiển. Mã có sẵn tại liên kết này. https://github.com/.ususk/kears/blob/release/kears.ihex .
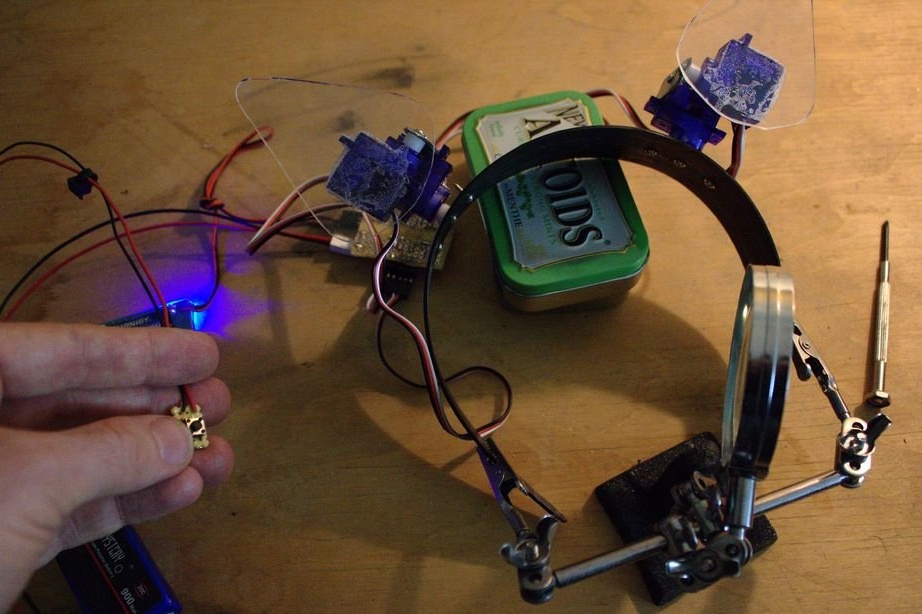
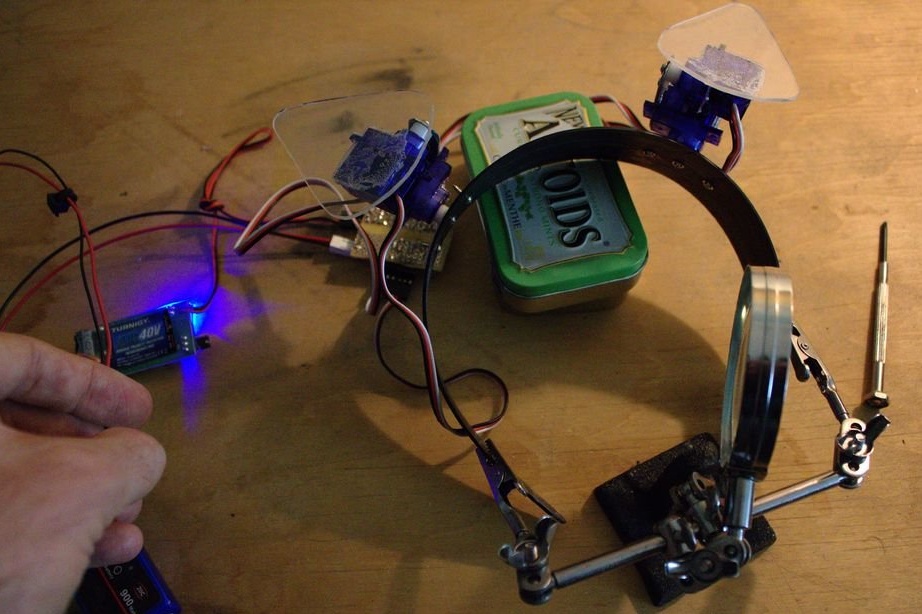
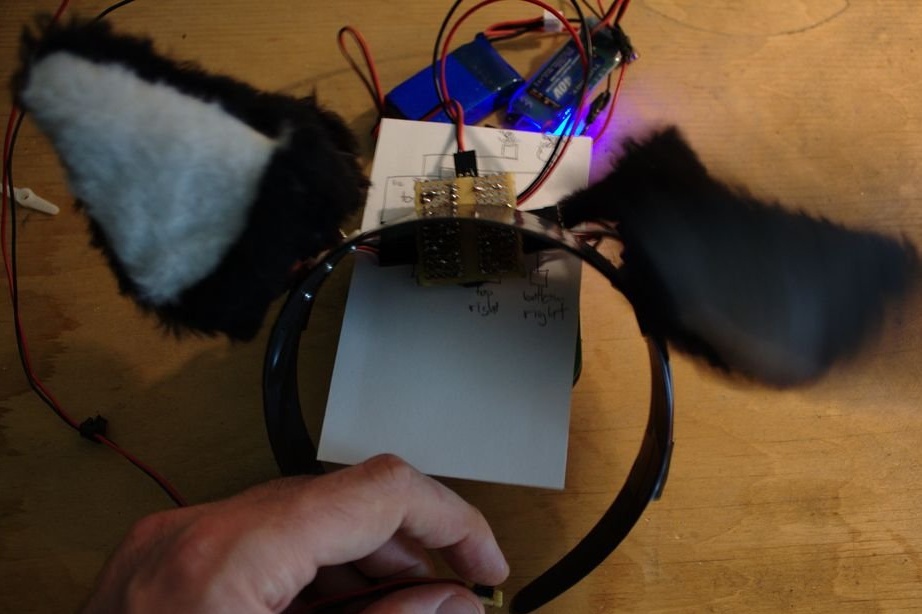
Sau khi tải xuống mã, bạn cần kết nối ổ đĩa servo, pin và kiểm tra hoạt động của thiết bị. Với một servo, bạn cần kiểm tra tất cả các lệnh bằng cách kết nối nó với các đầu nối. Mỗi lần nhấn nút sẽ cấp nguồn cho một servo.
Bước sáu: Cài đặt ổ đĩa Servo
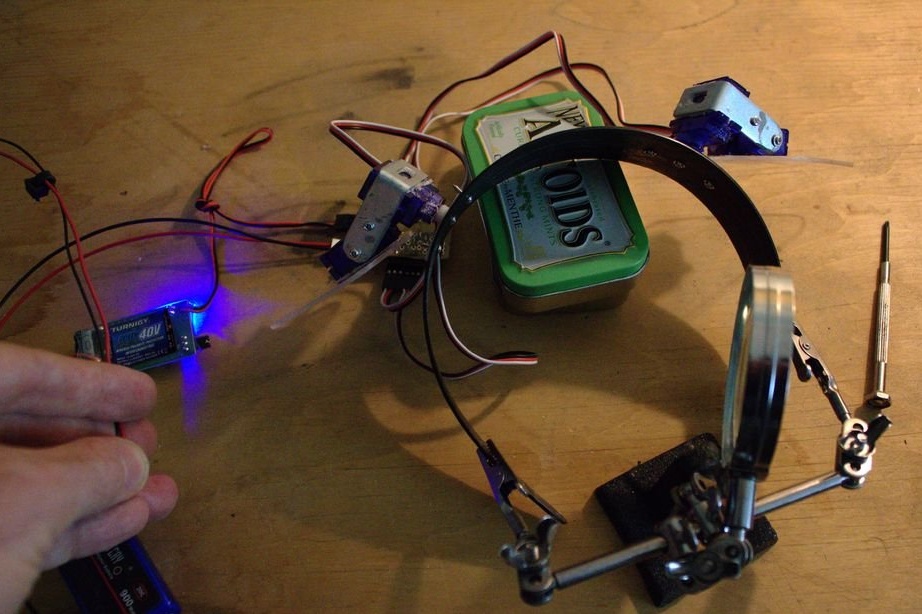
Bây giờ bạn cần phải cài đặt các servo trên vành. Đảm bảo các servo thứ hai. Điều quan trọng là đặt các servo đến vị trí ban đầu của chúng. Sau đó, bạn cần kết nối các servo với bảng. Tất cả các servo đều có ba dây: đen hoặc nâu để nối đất, đỏ cho nguồn điện (~ 4,8-6 V), dây tín hiệu màu vàng, cam hoặc trắng (3-5 V). Kết nối các servo với vi điều khiển bao gồm sơ đồ sau:
Chân 5 (PB0) - Servo bên phải thấp hơn
chân 2 (PB3) - phía trên bên phải
chân 6 (PB1) - phía dưới bên trái
chân 7 (PB2) - phía trên bên trái
Sau khi mọi thứ được kết nối, bạn cần bật nguồn của mạch bằng cách kết nối pin với bộ điều chỉnh, và bộ điều chỉnh với mạch. Trong khi mạch được bật, mỗi servo sẽ được định vị sao cho chúng ở vị trí bắt đầu mong muốn. Các servo cơ sở nên hướng về phía trước, và các servo hàng đầu nên có acrylic (cơ sở) trong cùng mặt phẳng với mặt.
Sau khi mọi thứ đã được thiết lập và kết nối là cần thiết, nó sẽ thực hiện từng chuyển động nhất định để đảm bảo rằng chúng có thể di chuyển với đầy đủ các chuyển động, mà không cần nhấn bất cứ thứ gì.
Nhấn nút như sau: nhấn và giữ, nhấn đúp và giữ nút, nhấn ba lần. Mỗi hành động này đưa ra một mệnh lệnh cho một phong trào cụ thể.
Bước thứ bảy: trường hợp
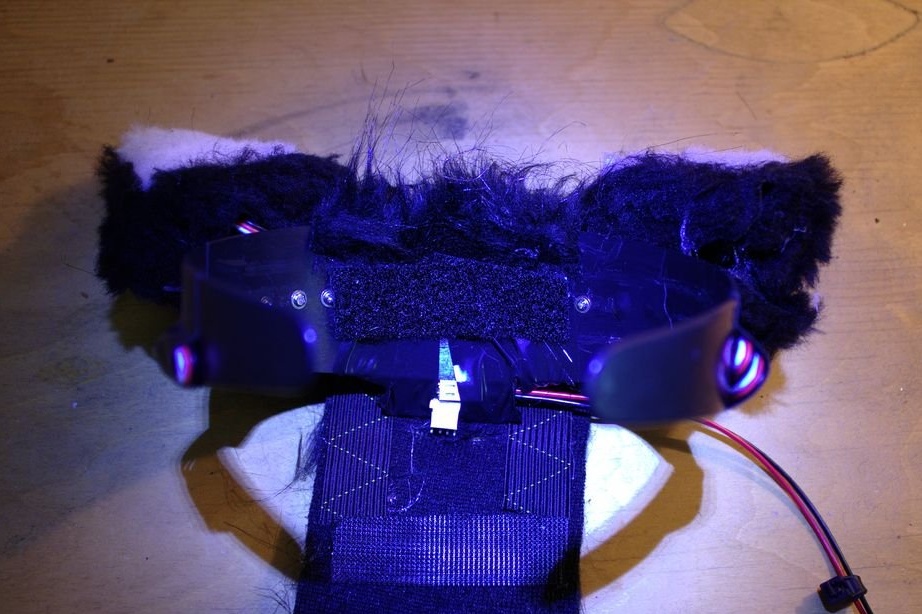
Bây giờ bạn có thể bọc tai bằng lông, cho chúng giống như một con mèo.









Đối với khối lượng, chủ dán keo các miếng bọt biển vào cơ sở. Bước này có thể không được thực hiện, nhưng theo cách này, đôi tai trông đẹp hơn.







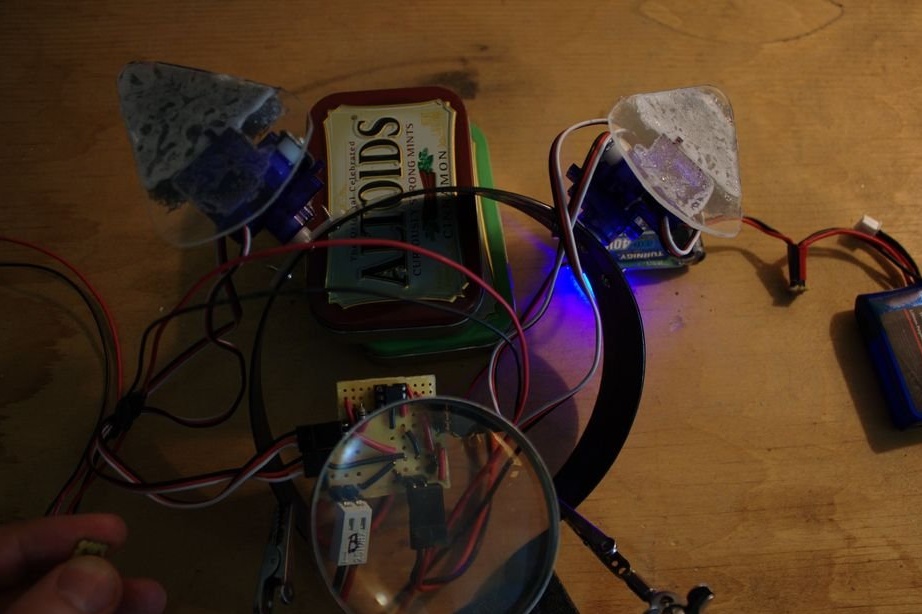
Bây giờ bạn cần chắc chắn một lần nữa rằng các servo trong tất cả các mặt phẳng di chuyển mà không chạm vào và bạn có thể sửa nắp. Các bậc thầy dán một bìa lông bằng cách sử dụng keo nóng chảy. Khi dán, bạn cần tính toán chính xác các điểm dán. Vải không bị chùng xuống, nhưng cũng không nên ngăn không cho động cơ servo di chuyển. Mô dư thừa cần phải được cắt.



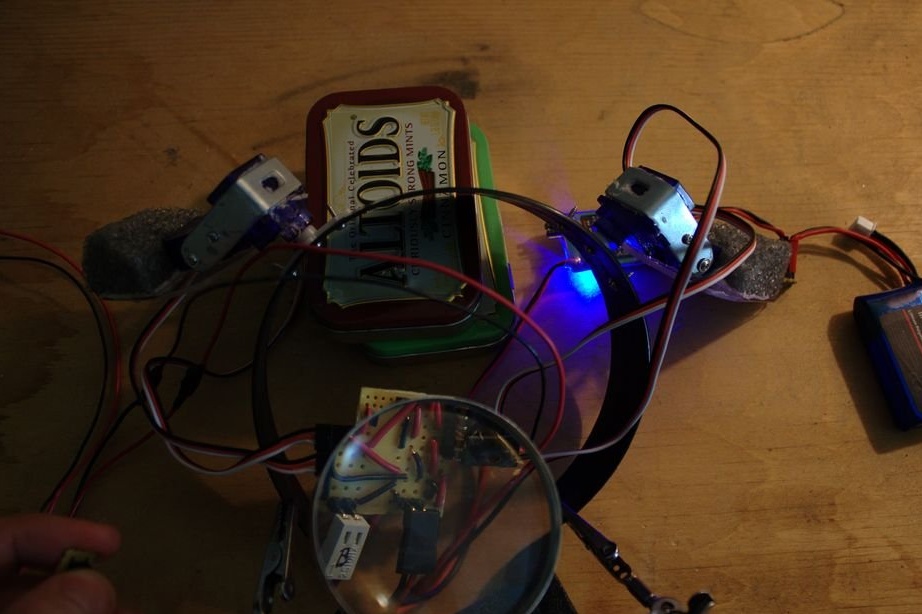
Bước tám: Hội nghị cuối cùng
Bây giờ là lúc để hoàn thành sản phẩm. Các bậc thầy phá vỡ vành với lông. Pin và bộ điều chỉnh được bảo đảm trong một hộp nhựa, và sau đó trong một túi phía sau vành.

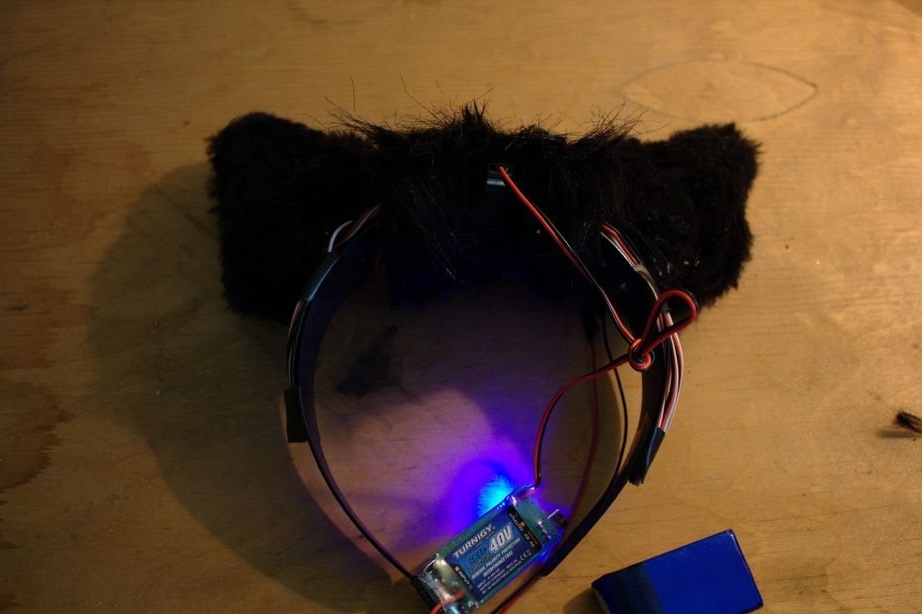




Mọi thứ đã sẵn sàng. Dưới đây bạn có thể thấy một vài ví dụ nữa của thiết bị.