

Bài viết này thảo luận về việc sản xuất các thiết bị điều khiển vô tuyến dựa trên bảng tỷ lệ Arduino. Một tính năng thú vị của dự án là thiết bị được hình thành như một sự thay thế cho thiết bị "người lớn", nhưng có thể tự làm được. Có các phím cắt trên máy phát, điều này rất quan trọng đối với việc điều khiển, ví dụ mô hình Máy bay, máy phát cũng được trang bị một màn hình nhỏ với đèn LED hữu cơ, hiển thị thông tin cơ bản về hoạt động của máy phát. Thiết bị được thiết kế cho 6 kênh, 4 tỷ lệ và 2 rời rạc. Tác giả cũng đặt nền tảng cho việc bổ sung trong tương lai của hai kênh tỷ lệ thuận hơn, 2 chiết áp được thêm vào vụ án, nhưng tại thời điểm này chúng không liên quan. Tuy nhiên, điều này là đủ để điều khiển mô hình máy bay, tàu hoặc ô tô và các kênh riêng biệt sẽ cho phép bạn kiểm soát tải bổ sung, ví dụ, bao gồm đèn pha, đèn sàn, đèn điều hướng hoặc thậm chí phóng tên lửa nhỏ. Thiết bị có hai chế độ điều khiển - tuyến tính và hàm mũ.
Đối với máy phát, bạn sẽ cần:
1 x Arduino NANO / UNO / ProMini
1 x bảng bảo vệ BMS cho ba lon Li-ion
Đầu nối 1 x 5,5 x 2,1 mm
1 x Bộ chuyển đổi DC / DC XL6009
1 x LM2596 bộ chuyển đổi bước xuống nhỏ (tôi sẽ nói riêng về nó)
3 x 18650:
2 x cần điều khiển JH-D202X (được bán trên Ali)
2 x công tắc bật tắt
Màn hình OLED 1 x i2c 0,96 inch 128X64
1 x mô-đun radio NRF24l01 với bộ khuếch đại và ăng-ten
9 x nút ấn 6 * 6 * 5 mm
Điện trở đầu ra (xem sơ đồ)
Đối với người nhận, bạn sẽ cần:
1 x Arduino NANO / UNO / Pro Mini
1 x Module vô tuyến NRF24l01
1 x AMS1117 3.3V ổn áp
30 x lược chải
1 x bánh mì
Tụ điện 1 x 10 uF
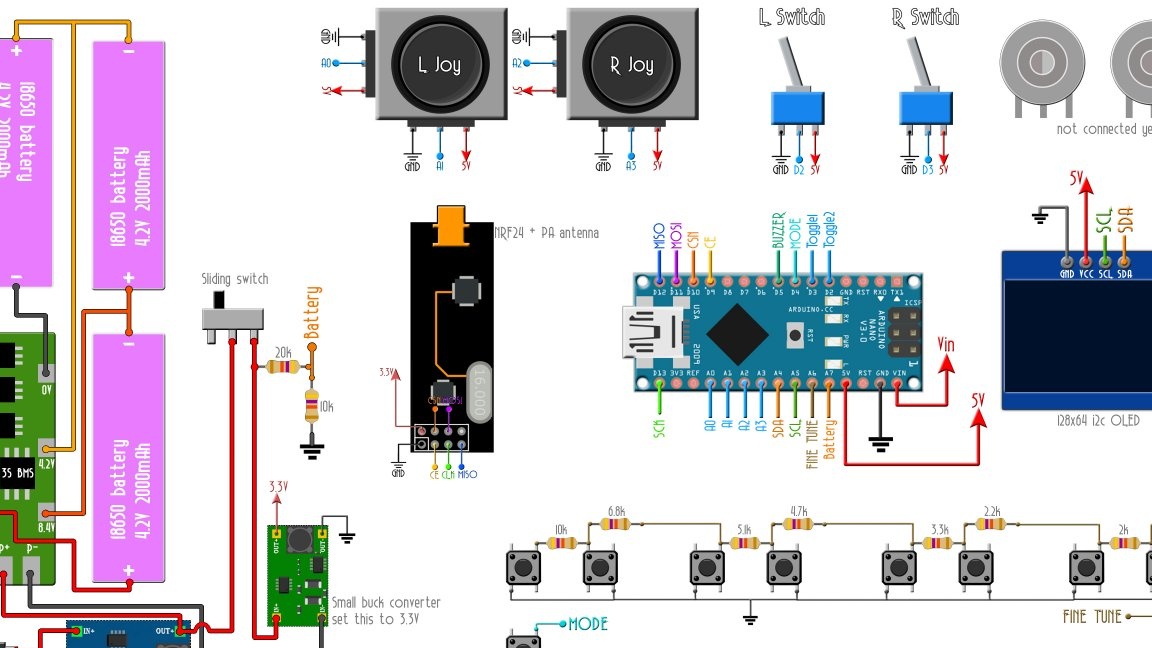
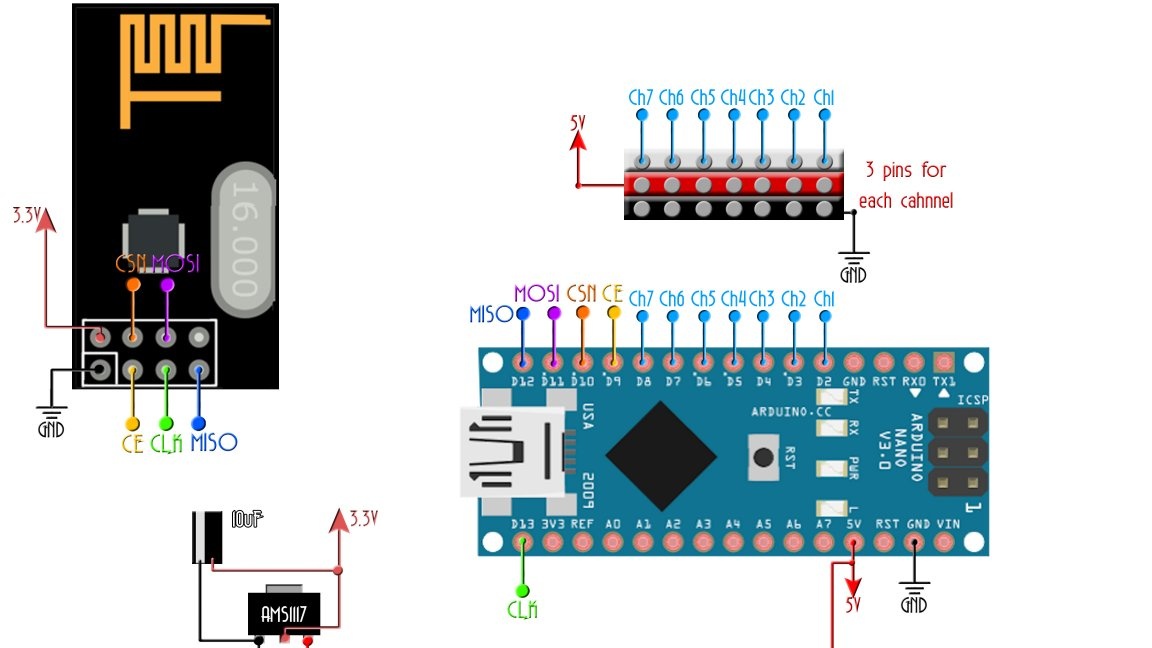
Dưới đây bạn có thể thấy một hình ảnh đồ họa của tất cả các thành phần và sơ đồ kết nối của chúng. Trước khi lắp ráp, bộ chuyển đổi buck phải được cấu hình, XL6009 đến 12.6 V (mô-đun này chịu trách nhiệm sạc), LM2596 đến 3,3 V (cấp nguồn cho mô-đun radio). Thay vì LM2596, về mặt lý thuyết có thể sử dụng ASM117, theo bảng dữ liệu, điện áp đầu vào tối đa của bộ ổn định này là 15 V, nhưng không nên áp dụng nó cao hơn 12 V. Rõ ràng, dựa trên những cân nhắc này, tác giả đã sử dụng một bộ chuyển đổi DC / DC khác. Thay vào đó, bạn cũng có thể sử dụng bộ ổn định có thể điều chỉnh, ví dụ LM317.
Nhà ở
Trường hợp bao gồm hai phần chính: trên và dưới. Ngoài ra, 9 nút (8 để cắt tỉa và một nút chế độ), 5 nút sao lưu cho các nút, khung hiển thị và thanh trượt nguồn được in.Tác giả đã in một PLA bằng một cục tẩy với độ che phủ 20%, vòi phun 0,4 mm và chiều cao lớp 0,3 mm. Nhân tiện, không ai cấm sử dụng hộp đựng khác, bạn chỉ cần lấy một hộp thích hợp, tự dán hoặc lấy một hộp khá lớn từ một món đồ chơi Trung Quốc, chúng gần như được bán trong túi trên các trang web phân loại.
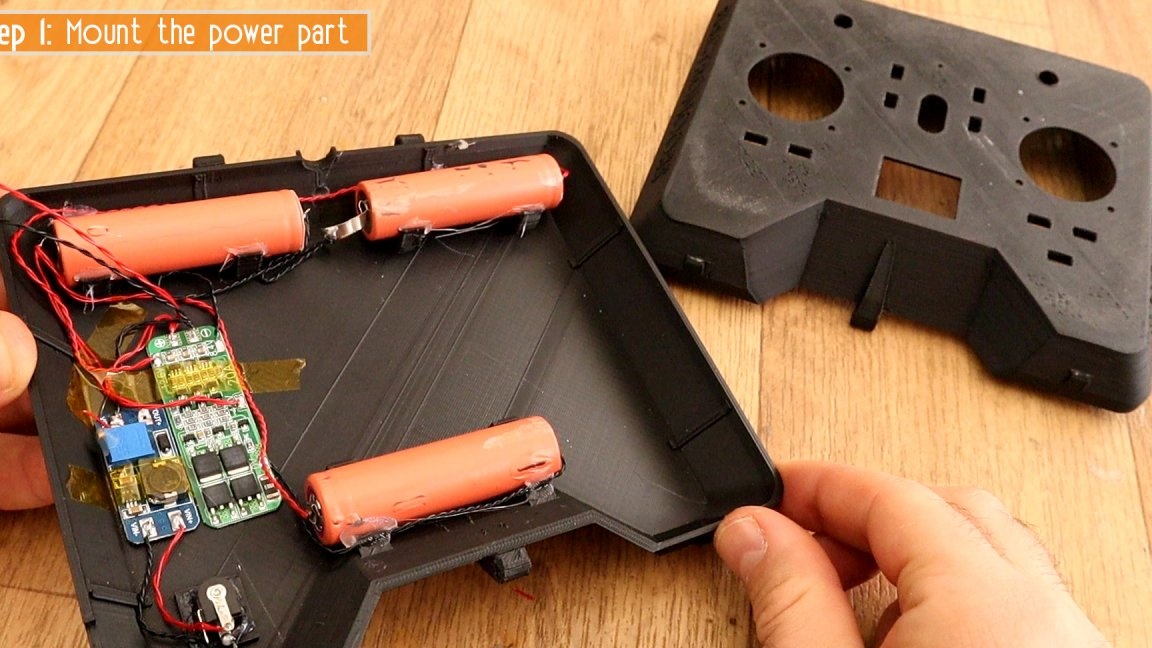
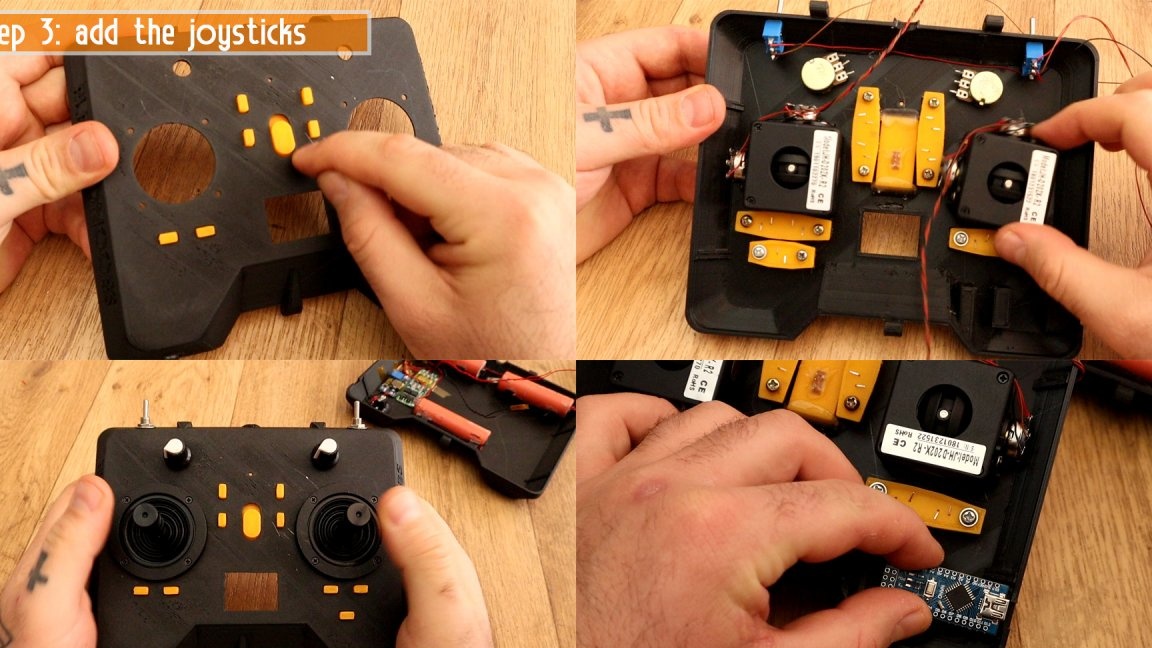
Gắn máy phát
Pin được kết nối nối tiếp. Tác giả đã làm điều này với hàn, tôi muốn lưu ý rằng việc hàn lon 18650 đòi hỏi một số kỹ năng, vì vậy nếu bạn không có kinh nghiệm như vậy, hãy mua pin có cánh hoa đã hàn và hàn chúng. Ngoài ra, pin theo sơ đồ trên được hàn vào mô-đun BMS, đầu vào được cung cấp điện áp từ bộ chuyển đổi XL6009 (có thể sử dụng MT3608). BMS chịu trách nhiệm sạc đều / xả tất cả các lon và tắt nguồn khi hết pin. Điện áp cũng có thể được theo dõi bằng cách sử dụng màn hình. Pin được sạc bằng nguồn điện 9 V với dòng điện không quá 3 A (tối đa cho XL6009). Trong thực tế, dòng điện sạc phải được tính toán tùy thuộc vào dung lượng của pin và lấy nguồn điện với dòng điện thấp hơn một chút hoặc giới hạn nó. Thật thuận tiện để gắn các mô-đun trong vỏ với sự trợ giúp của băng keo hai mặt "ô tô".
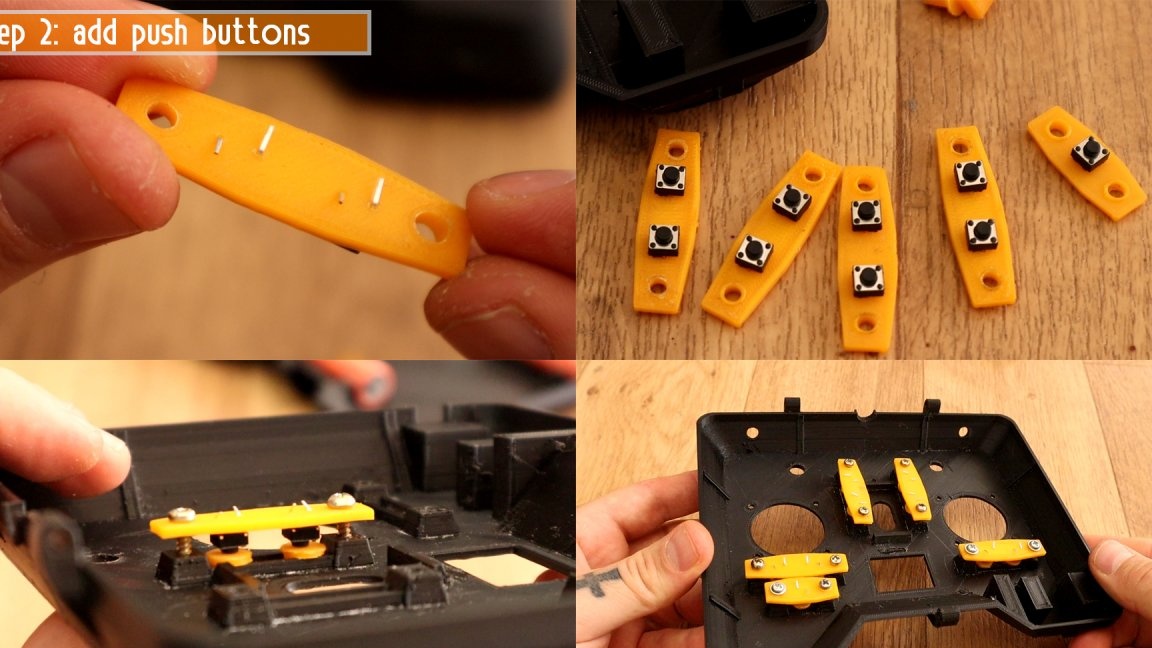
Các nút đồng hồ được cài đặt trên các nền tảng đặc biệt, sau đó chúng được gắn với các ốc vít nhỏ để hỗ trợ tương ứng bên trong vỏ. Ở đây, trên thực tế, mọi thứ đều ở cấp độ của nhà thiết kế và được hiểu rõ từ bức ảnh.
Các nút được liên kết với nhau bằng điện trở, do đó về cơ bản chỉ để lại một bàn phím điện trở nhỏ, cho phép bạn chỉ sử dụng một chân của bo mạch Arduino. Các dây được hàn vào chiết áp cần điều khiển, các đạo trình cực đi xuống đất và 5 V, trung bình dẫn đến pin Arduino tương ứng. Tôi có kế hoạch lặp lại sơ đồ này, tôi đã thử nghiệm một chút và tôi có thể nói rằng mã có chức năng tự động đảo ngược các kênh khi cần, nhưng tôi chưa hiểu làm thế nào lược đồ xác định nhu cầu này. Điều này để nói rằng việc đảo ngược kênh về cơ bản được thực hiện bằng cách hàn các kết luận cực đoan ở những nơi. Cần điều khiển như vậy, tại thời điểm viết bài, được bán ở Ali với mức giá khoảng 7 đô la, cho dù điều đó tùy thuộc vào bạn hay không tùy thuộc vào bạn. Thay vào đó, bạn có thể sử dụng các mô-đun cần điều khiển cho arduino hoặc cần điều khiển từ bộ điều khiển trò chơi.
Trong thực tế, cần điều khiển hoạt động như một bộ chia, làm chệch hướng tay cầm, chúng ta thay đổi điện áp ở đầu ra giữa của chiết áp và tùy thuộc vào điện áp này, arduino xác định độ lệch.
[trung tâm] [/ trung tâm]
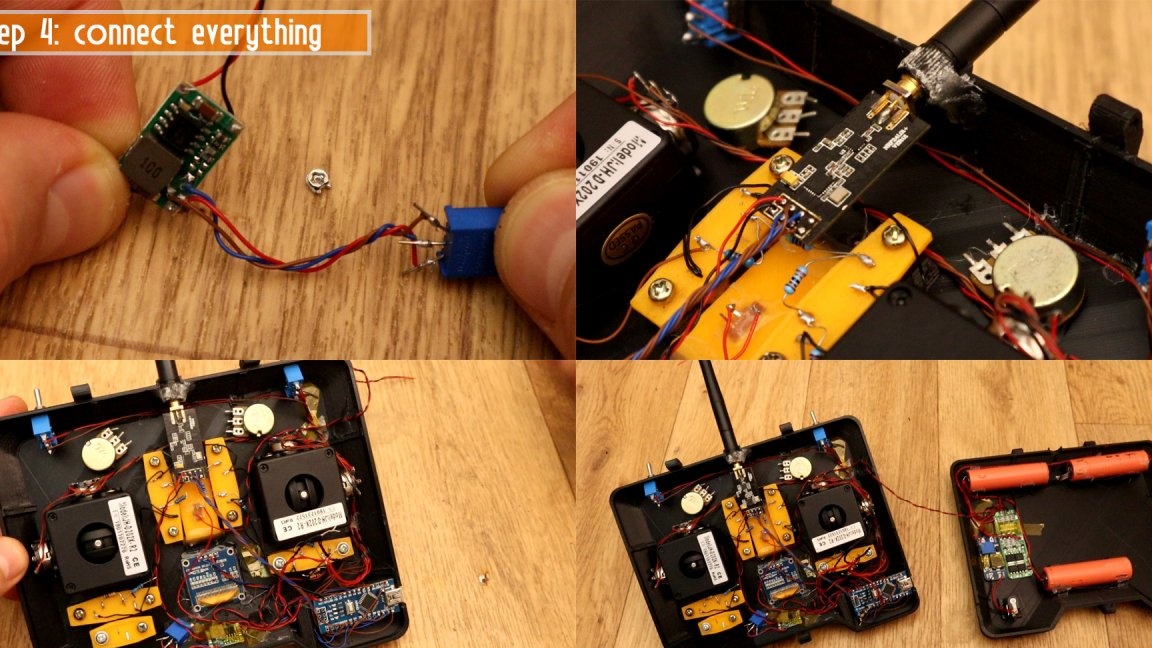
Tumblers cũng được kết nối. Công tắc bật tắt là cần thiết khi tắt, vì kênh rời rạc và chỉ có hai giá trị - 0 hoặc 1, tùy thuộc vào việc đầu ra của arduino bị thu hút xuống đất hay với nguồn điện 5V. Ngoài ra, công tắc bật tắt là cần thiết, nếu bạn để đầu ra "treo trong không khí", Điều gì sẽ xảy ra khi sử dụng ba vị trí, bộ điều khiển không hiểu điều gì đang xảy ra và giá trị nhảy ngẫu nhiên 0 hoặc 1 (theo kinh nghiệm của tôi). Bạn không thể đặt chiết áp bổ sung, tại thời điểm chúng không liên quan. Hoặc bạn có thể đặt và theo dõi trang nguồn, có lẽ tác giả cuối cùng sẽ đăng firmware đã cập nhật.
Trong thực tế, cần điều khiển hoạt động như một bộ chia, làm chệch hướng tay cầm, chúng ta thay đổi điện áp ở đầu ra giữa của chiết áp và tùy thuộc vào điện áp này, arduino xác định độ lệch.
[trung tâm] [/ trung tâm]
Tumblers cũng được kết nối. Công tắc bật tắt là cần thiết khi tắt, vì kênh rời rạc và chỉ có hai giá trị - 0 hoặc 1, tùy thuộc vào việc đầu ra của arduino bị thu hút xuống đất hay với nguồn điện 5V. Ngoài ra, công tắc bật tắt là cần thiết, nếu bạn để đầu ra "treo trong không khí", Điều gì sẽ xảy ra khi sử dụng ba vị trí, bộ điều khiển không hiểu điều gì đang xảy ra và giá trị nhảy ngẫu nhiên 0 hoặc 1 (theo kinh nghiệm của tôi). Bạn không thể đặt chiết áp bổ sung, tại thời điểm chúng không liên quan. Hoặc bạn có thể đặt và theo dõi trang nguồn, có lẽ tác giả cuối cùng sẽ đăng firmware đã cập nhật.
Tiếp theo, một arduino, một mô-đun radio và một bảng điện mô-đun radio được cài đặt. Như mô tả ở trên, cần phải đặt điện áp 3,3 volt trên nó. Hầu như không thể làm điều này bằng cách sử dụng một điện trở biến tiêu chuẩn, vì vậy tác giả đã mở nó ra và thay vào đó là một chiếc tông đơ đa biến. Tiếp theo, màn hình được gắn kết và tất cả các thành phần được kết nối với các đầu nối arduino theo sơ đồ.
Chương trình cơ sở
Phần sụn Arduino đã được nói đến khoảng 1000 lần, tại thời điểm này, khả năng thực hiện điều này trong khi giữ một dự án arduino theo mặc định cũng quan trọng như khả năng giữ một que hàn trong tay trong khi cầm thứ gì đó để hàn.Mã cho máy phát, máy thu, thư viện cần thiết và một tệp để in 3D của vỏ máy có thể được tải xuống trong một kho lưu trữ ở cuối bài viết.
Người nhận
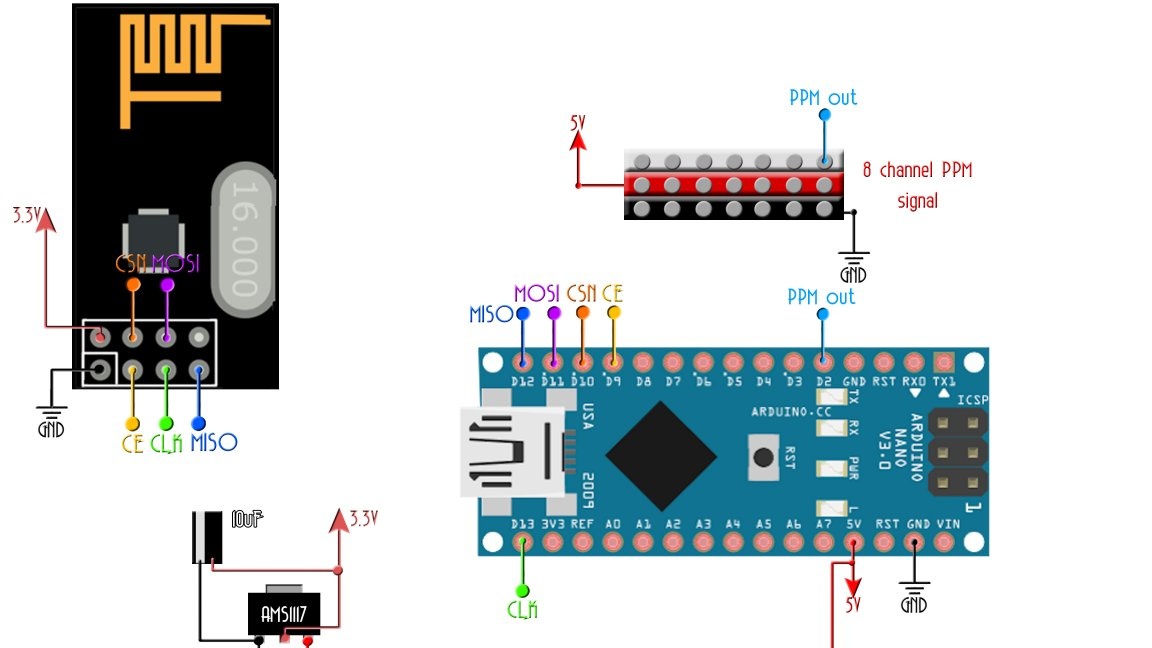
Đối với máy thu, bạn sẽ cần một bo mạch Arduino khác, mô-đun vô tuyến (không có ăng-ten, đo từ xa vẫn không được thực hiện ở đây) và bộ ổn định 3,3 volt. Người nhận được hàn vào bảng. Sức mạnh của máy thu được thực hiện giống như sức mạnh của bất kỳ máy thu nào khác của nhà máy, từ một đầu ra đặc biệt của bộ điều khiển tốc độ.

Theo cách riêng của tôi, tôi muốn thêm rằng thay vì ăng-ten tiêu chuẩn của mô-đun này, mong muốn hàn cùng một ăng-ten được cài đặt trong mô-đun với bộ khuếch đại (chỉ không có vỏ). Điều này sẽ không ảnh hưởng đặc biệt đến phạm vi tiếp nhận, nhưng sẽ ảnh hưởng đáng kể đến chất lượng tiếp nhận tùy thuộc vào vị trí của mô hình được điều khiển trong các mặt phẳng khác nhau. Đối với các máy thu và máy phát hiện đại, cho mục đích này, thậm chí hai ăng ten được lắp đặt, được đặt vuông góc với nhau.
Ngoài ra, tác giả đã thực hiện một chức năng rất quan trọng - đầu ra từ tín hiệu thu PPM. Về mặt sơ đồ, không có gì thay đổi trong trường hợp này, bạn chỉ cần điền vào phần sụn khác, tín hiệu PPM được phát ra giống như trong hầu hết các máy thu của nhà máy - từ kênh đầu tiên (gas).
Đó là tất cả. Cá nhân, tôi thực sự thích dự án, và như tôi đã nói, dự định lặp lại nó trong trường hợp từ điều khiển từ xa của một món đồ chơi trẻ em. Trong menu, bạn có thể chọn chế độ từ tuyến tính đến hàm mũ và tinh chỉnh giá trị của mỗi thanh. Hãy nhớ rằng giá trị trung bình của mỗi kênh phải là 127.
Bạn có thể tải xuống mọi thứ bạn cần ở đây.
Tất cả thành công trong công việc!