




Xe tăng này không phải là lắp ráp đầu tiên của chủ. Một tính năng đặc biệt của mô hình đặc biệt này là hệ thống treo lò xo, trang bị cho mô hình một động cơ, khả năng bảo trì.
Hãy xem bản demo.
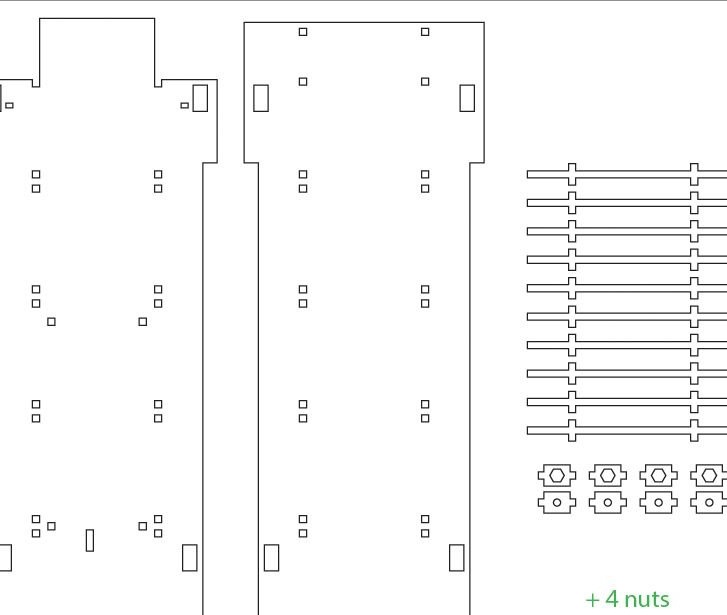
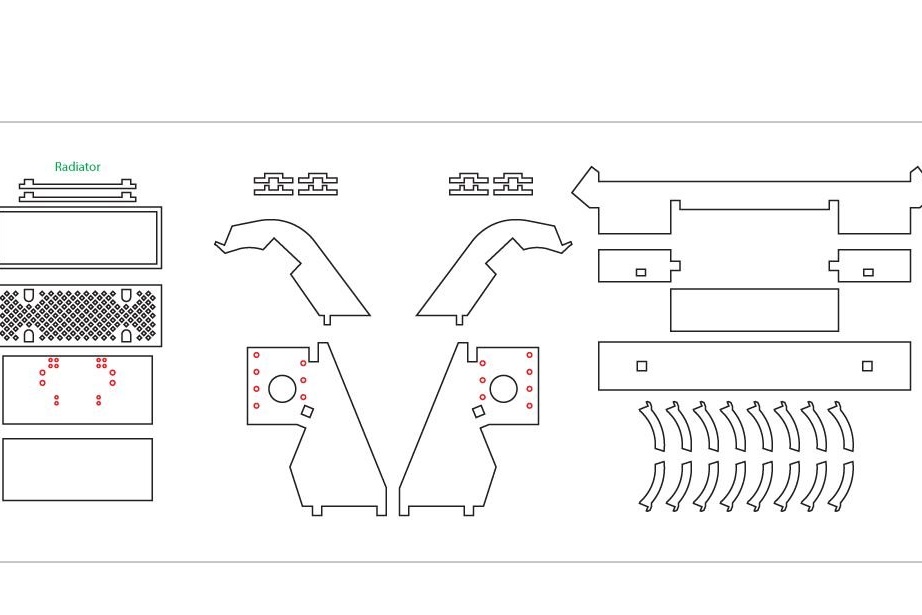
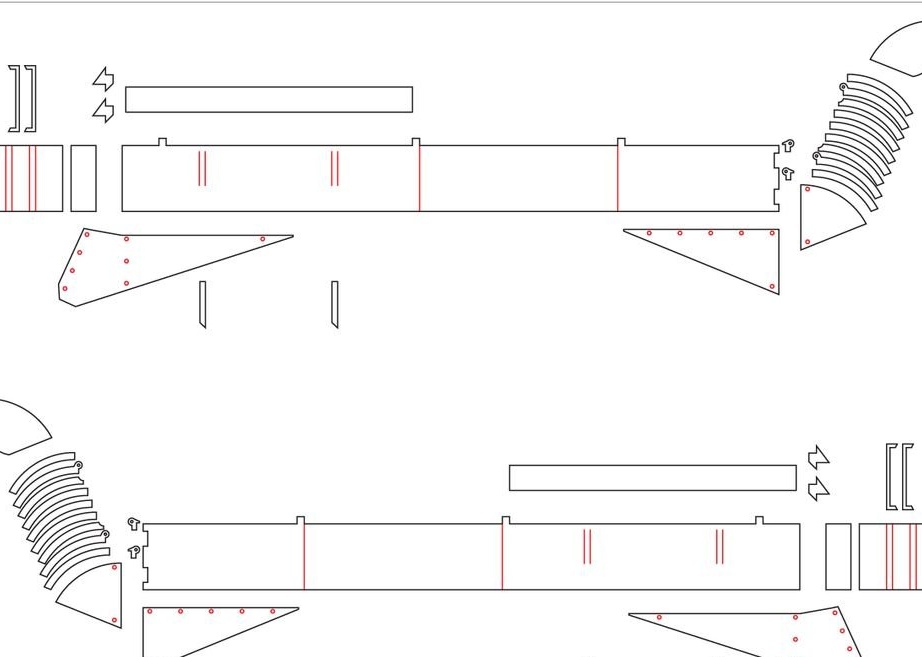
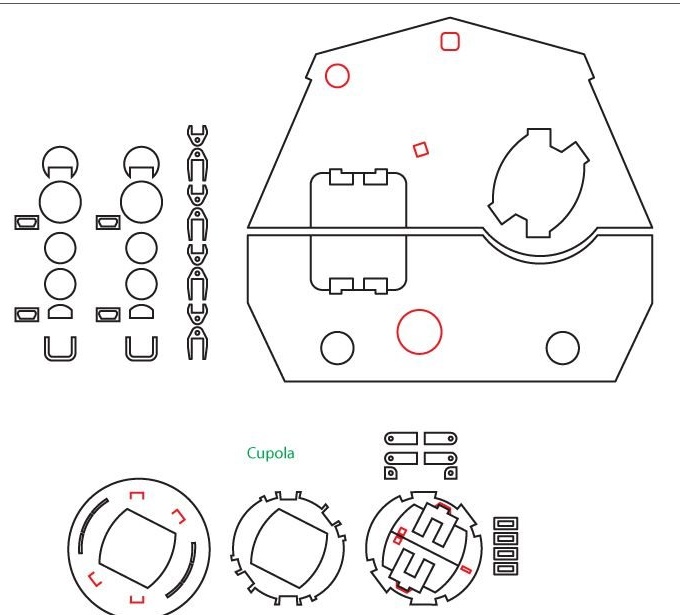
Chi tiết trường hợp được cắt ra trên máy cắt laser và các tệp có sẵn tại liên kết này.
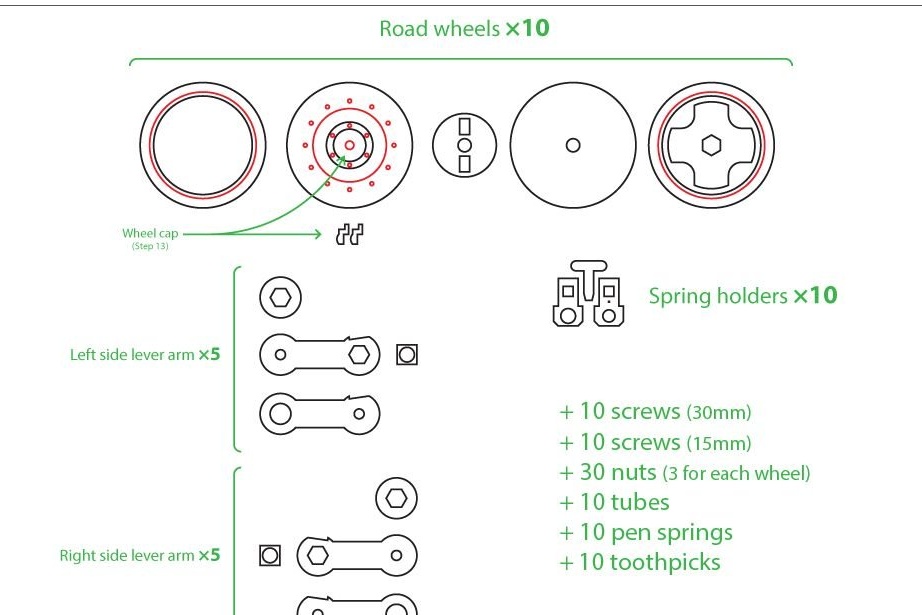
Ngoài các bộ phận cơ thể, sau đây sẽ là cần thiết
Dụng cụ và vật liệu:
- Vít 3 mm:
-14 chiếc dài 15 mm,
-10 chiếc dài 25 mm,
-10 chiếc dài 30 mm.
-Tubes x20 4 mm (đường kính trong Ø3 mm);
- Dây kim loại Ø 1 mm;
-Thread3 mm thanh ren;
-Springs cho mặt dây chuyền Ø 4,5 mm và chiều dài 30 mm -10 chiếc;
- Vít M4 2 chiếc;
Tăm xỉa răng
-Board;
Vi điều khiển ESP8266;
-Kết nối dây;
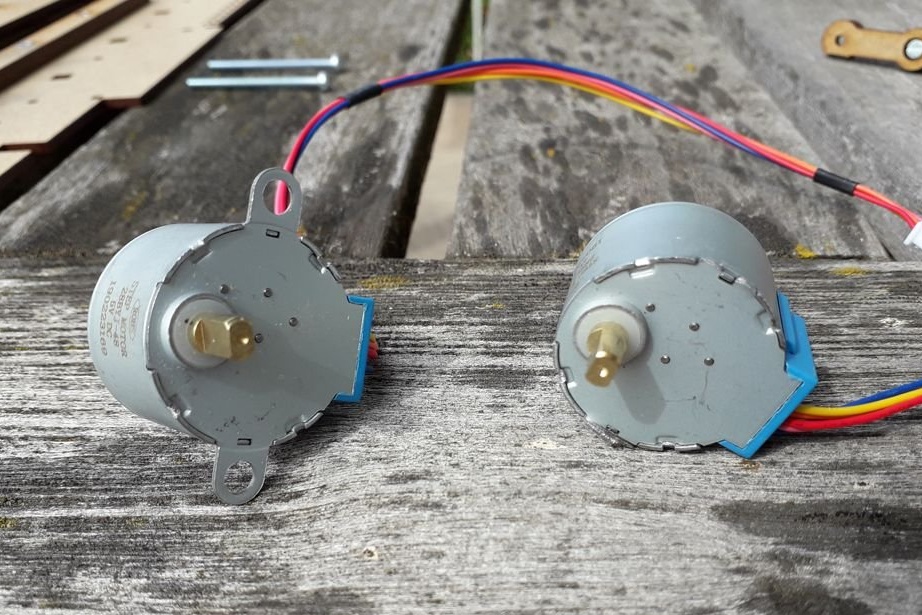
- Động cơ 28BYJ-48 với bảng điều khiển - 2 chiếc;
-Biết 5V;
Bước một: Xem lại
Trong bước này, chủ nhân phơi bày mô hình xe tăng và cũng chỉ ra liên kết đến trang web nơi bạn có thể nhìn thấy chiếc xe tăng ở dạng tháo rời.
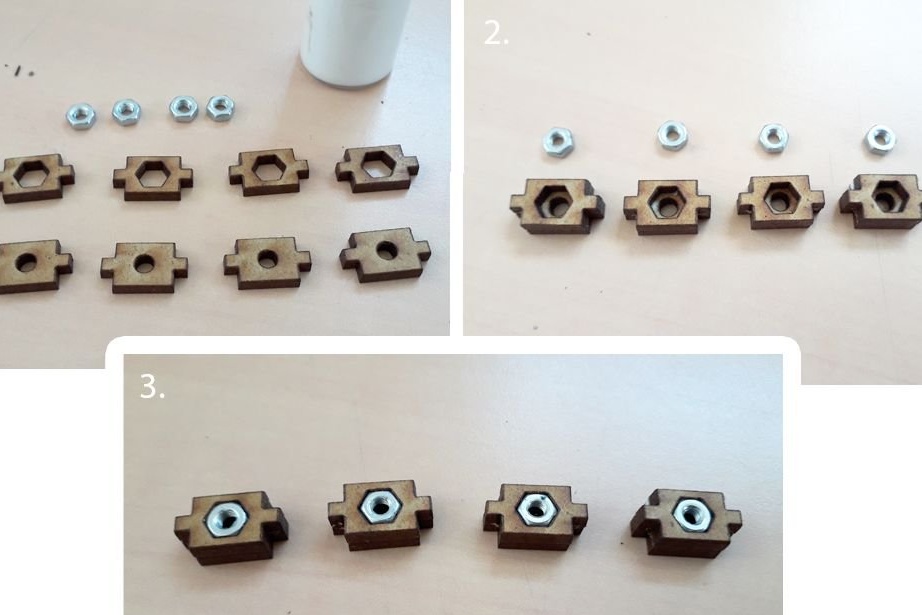
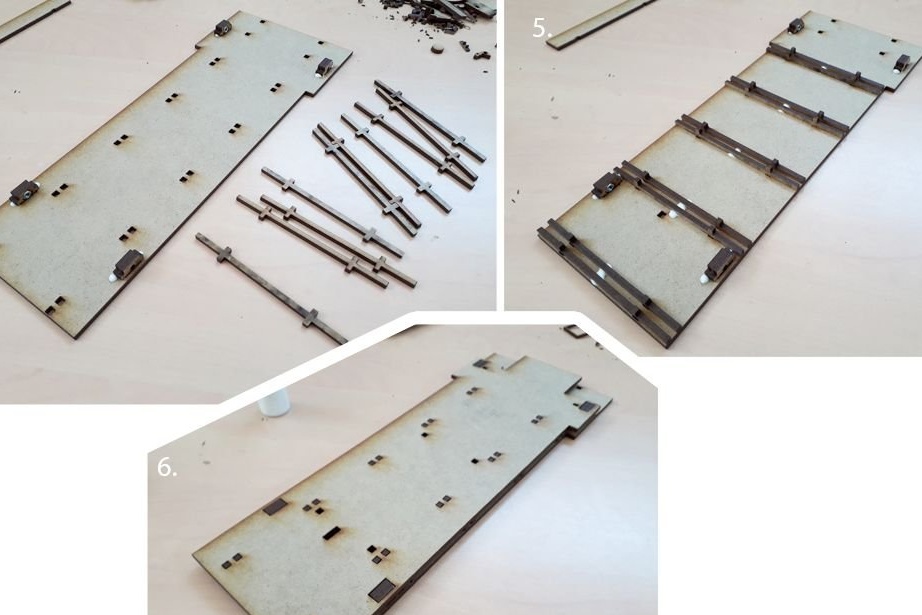
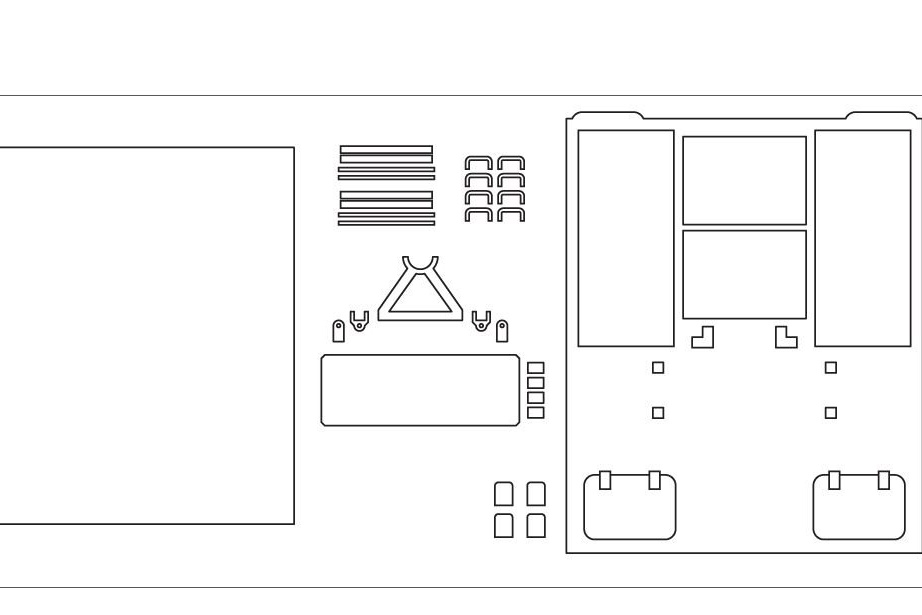
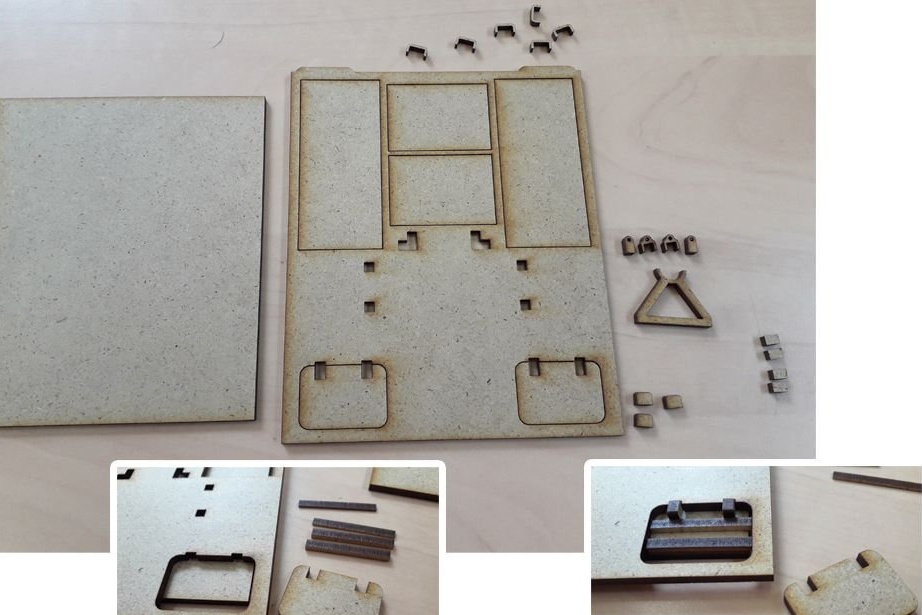
Bước hai: Dưới cùng
Bậc thầy bắt đầu lắp ráp từ đáy bể. Cài đặt các loại hạt trong gắn kết. Gắn kết ở hai bên của đáy. Thành lập hỗ trợ. Đặt lớp thứ hai.
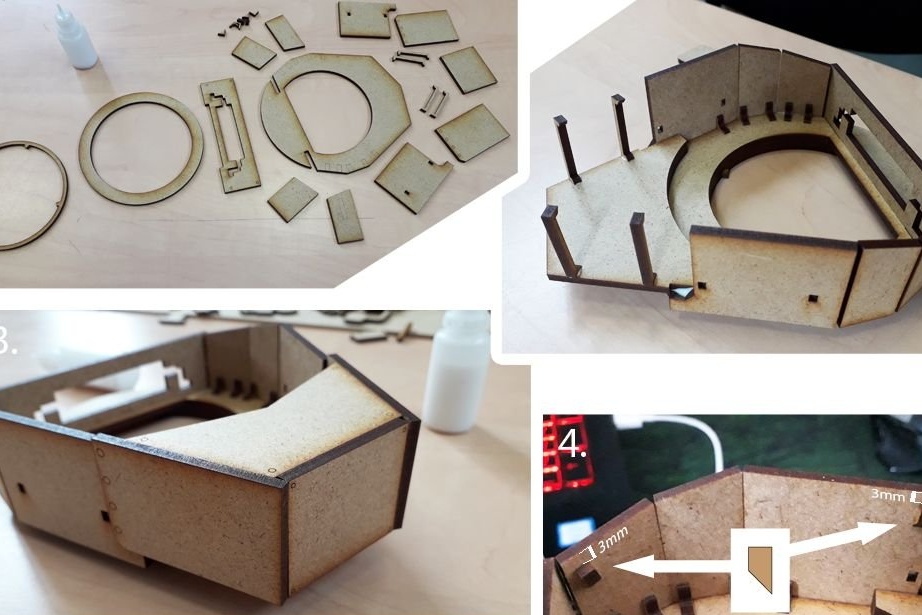
Bước ba: Trường hợp
Bắt đầu lắp ráp cơ thể. Lắp ráp một bộ tản nhiệt và một mặt sau.
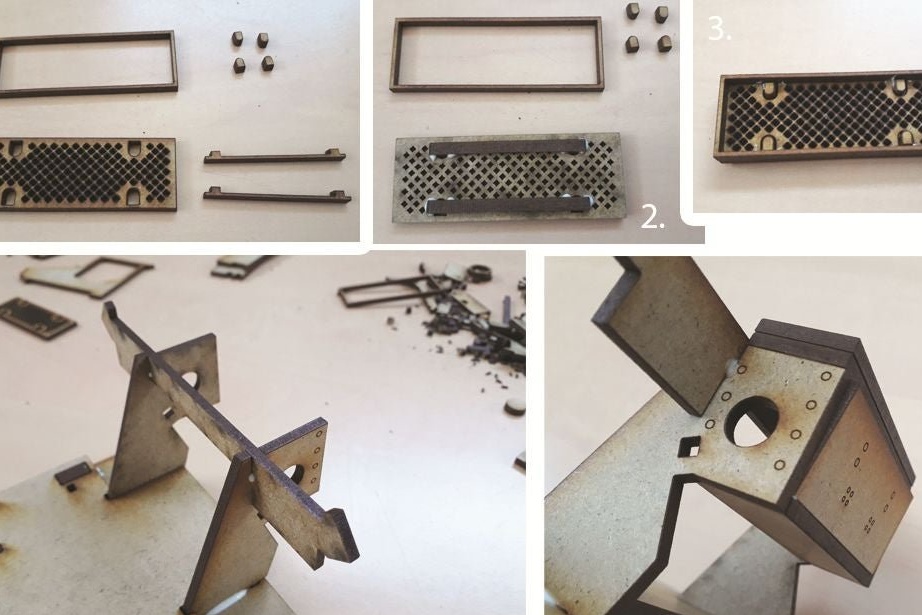
Tập hợp phía trước.
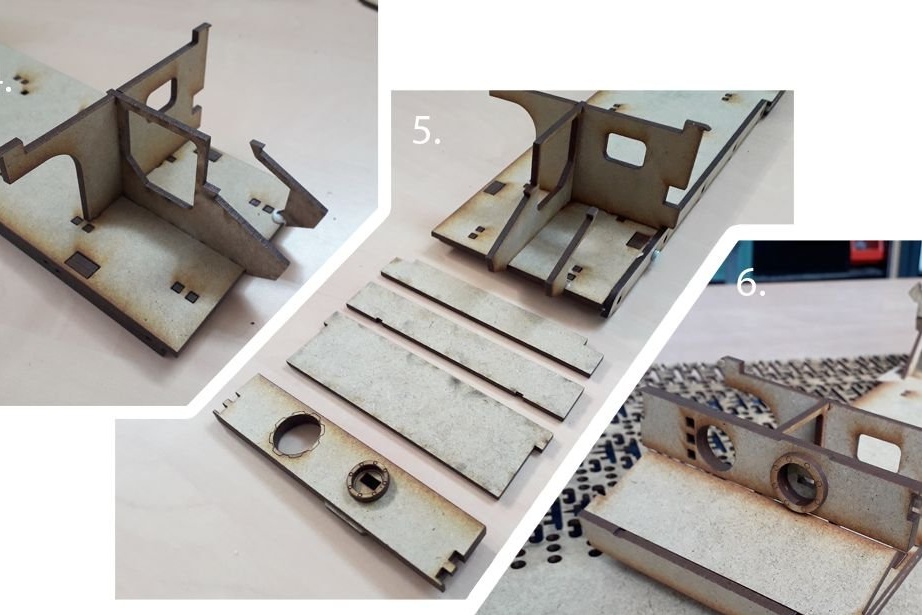
Sau khi đặt áo giáp phía trước, thân tàu đã hoàn thành. Các bộ phận khác sẽ được vít hoặc dán vào nó mà không cần dán
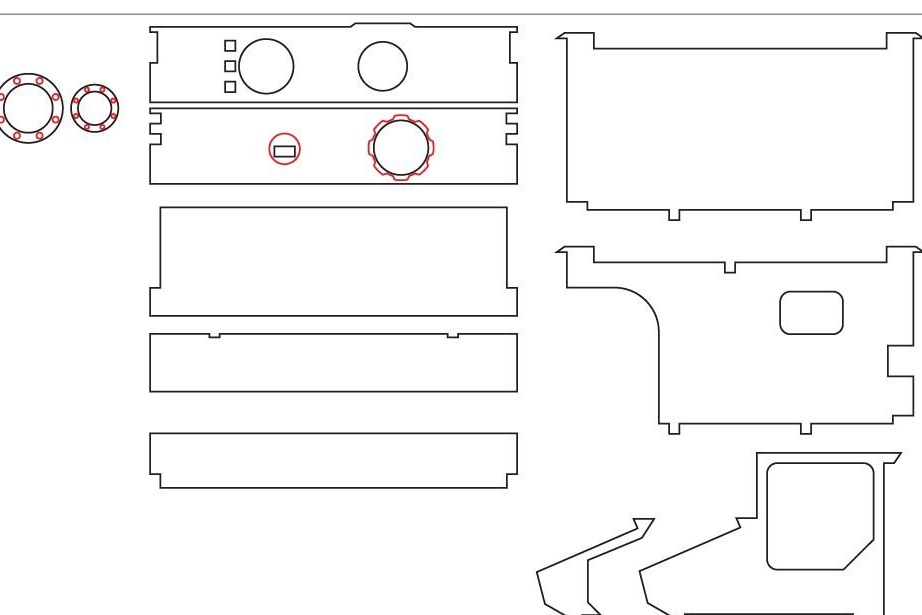
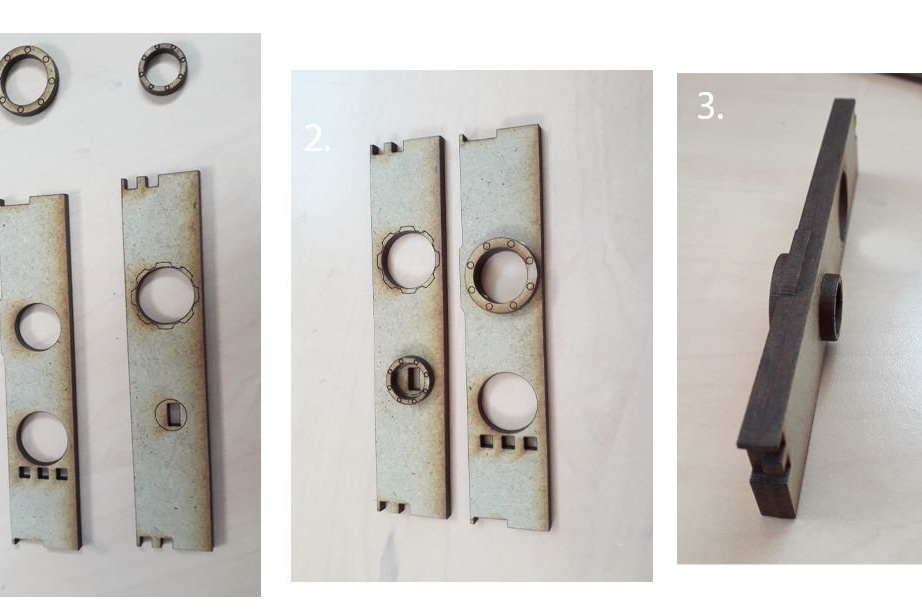
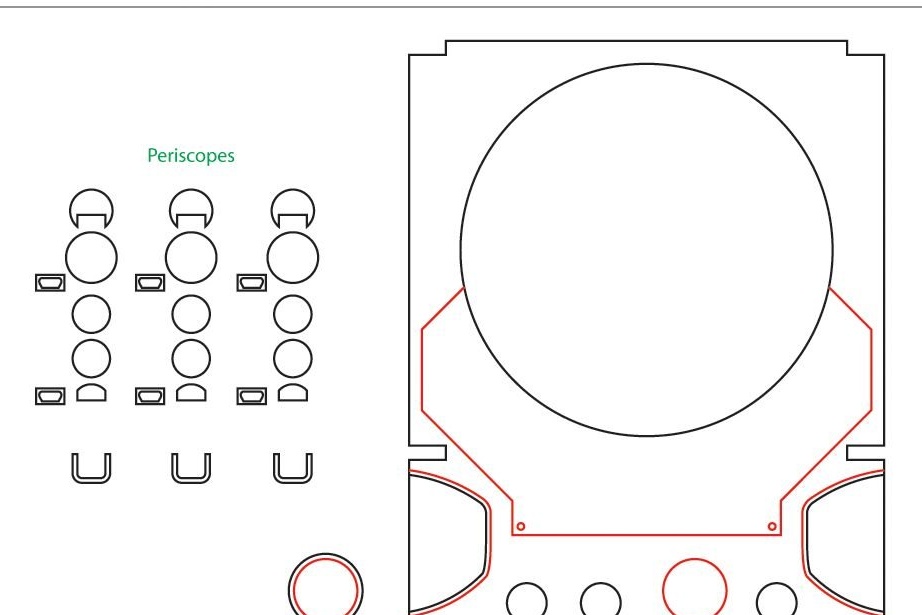
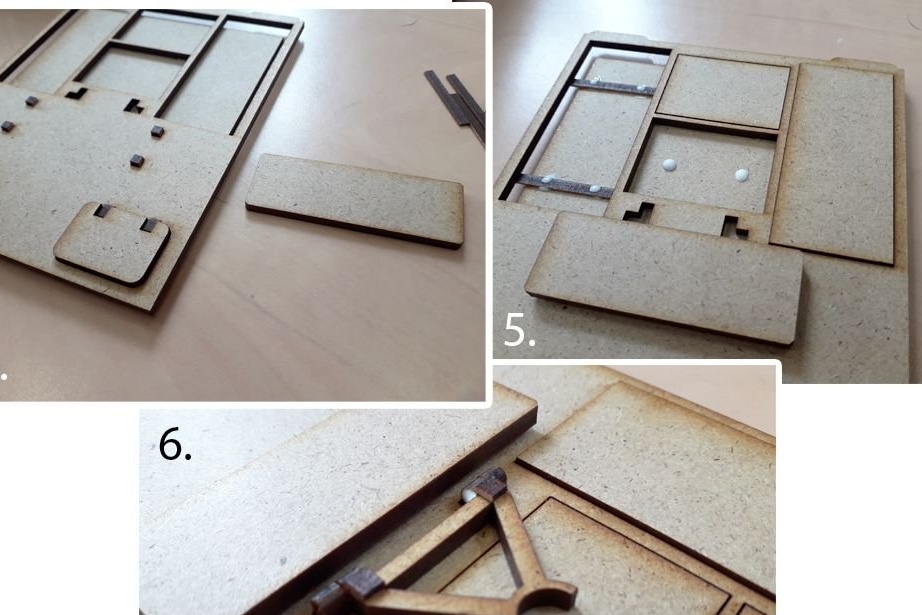
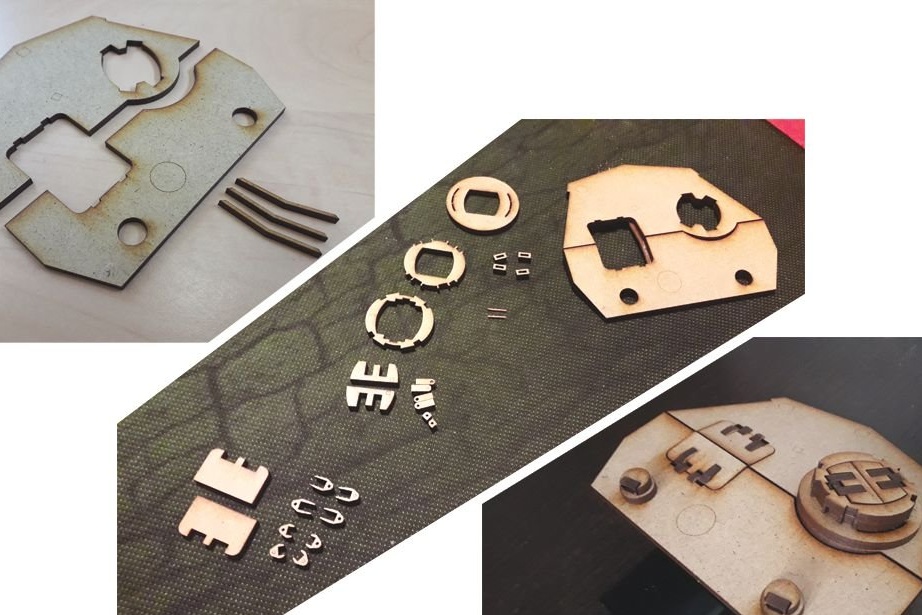
Bước bốn: Mái nhà và kính tiềm vọng
Phần này là một phần có thể tháo rời. Điều này được thực hiện để có quyền truy cập vào bên trong. Đòn bẩy kính tiềm vọng được cài đặt ở cuối mái nhà. Kính tiềm vọng được đặt trên mái nhà, nhưng không dính vào nó.

Bước năm: Bên
Tay treo được gắn trên sườn. Nó được vặn vào đáy đôi bằng vít 15 mm bằng cách sử dụng 4 đai ốc được buộc chặt trong bước đầu tiên.



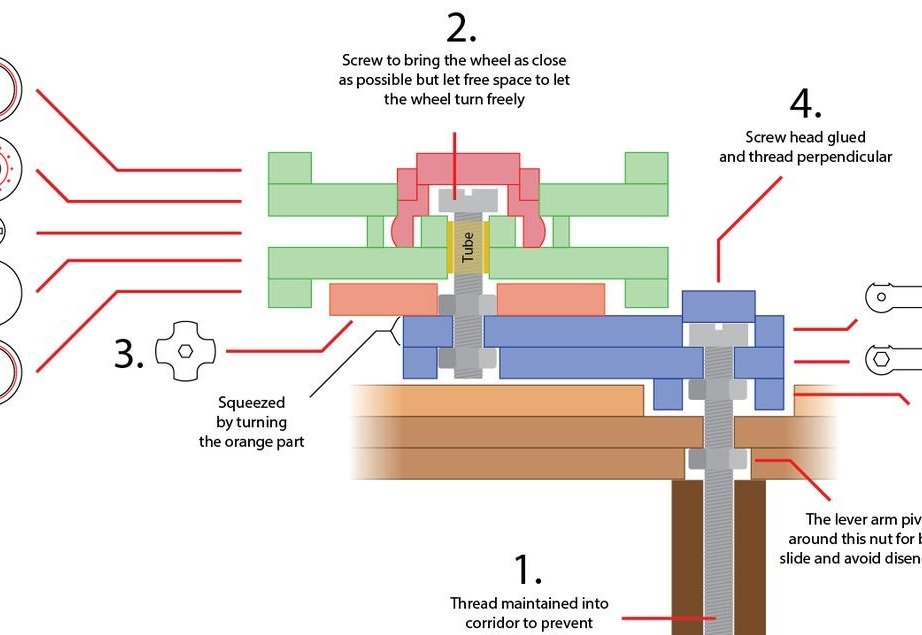
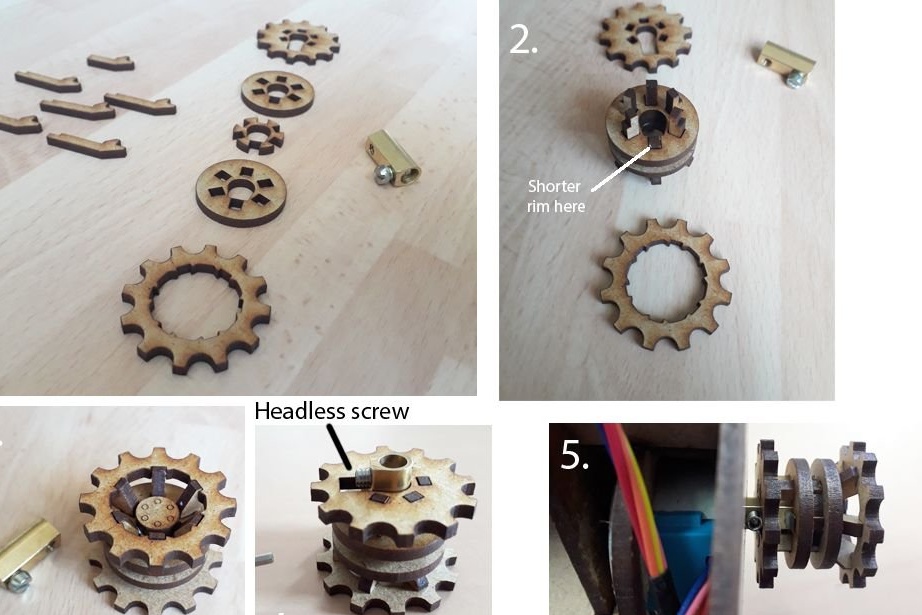
Bước sáu: Đình chỉ
Lắp ráp và cài đặt các thành phần hệ thống treo. Tất cả các bước được phản ánh chi tiết trong các bức ảnh. Áp dụng một chút keo vào các đầu của lò xo để sửa chữa. Bên trong lò xo đặt miếng tăm. Điều này sẽ ngăn chặn các lò xo bật ra.
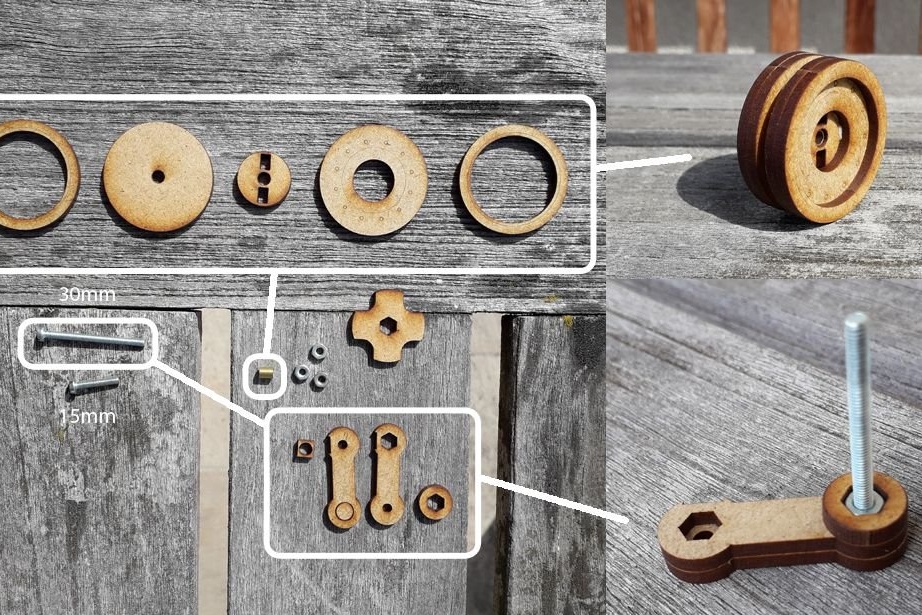

Lắp ráp và lắp đặt bánh trước thấp hơn. Một ống đồng và vít 20 mm được lắp đặt bên trong hốc bánh xe. Sau đó, trung tâm được đóng lại với một phích cắm.
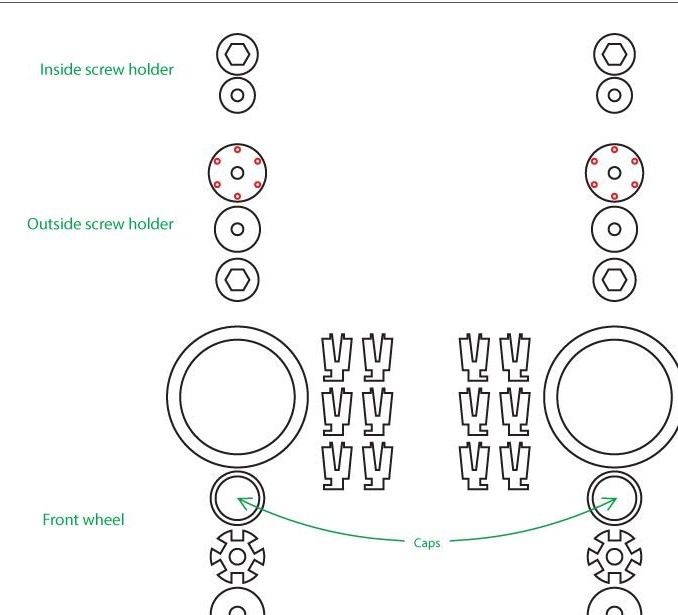

Lắp ráp và cài đặt chứ không phải là một bánh xe.


Lắp ráp và cài đặt bánh xe ổ đĩa. Những bánh xe này sẽ được kết nối với các động cơ được lắp đặt trong bể của bể.
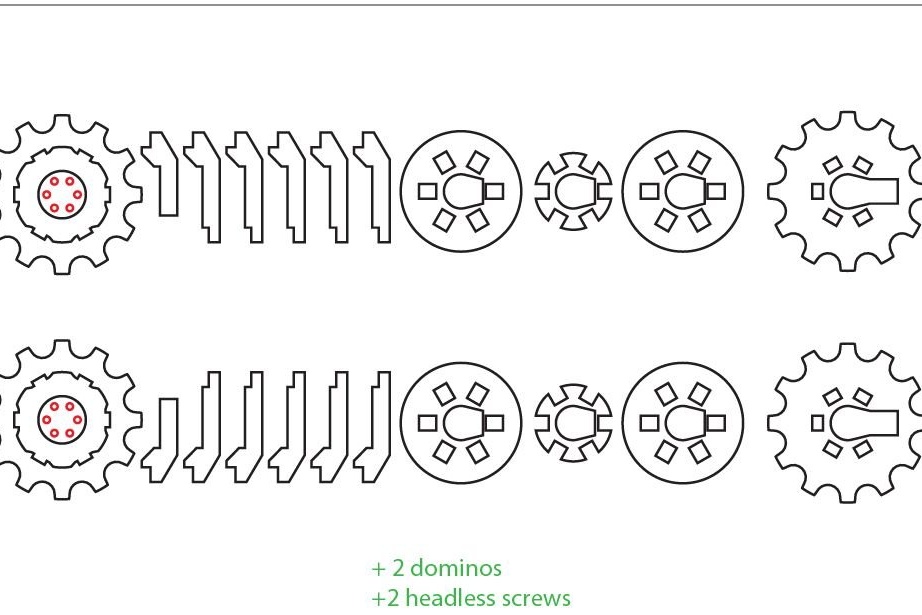
Cài đặt phích cắm trên bánh xe.

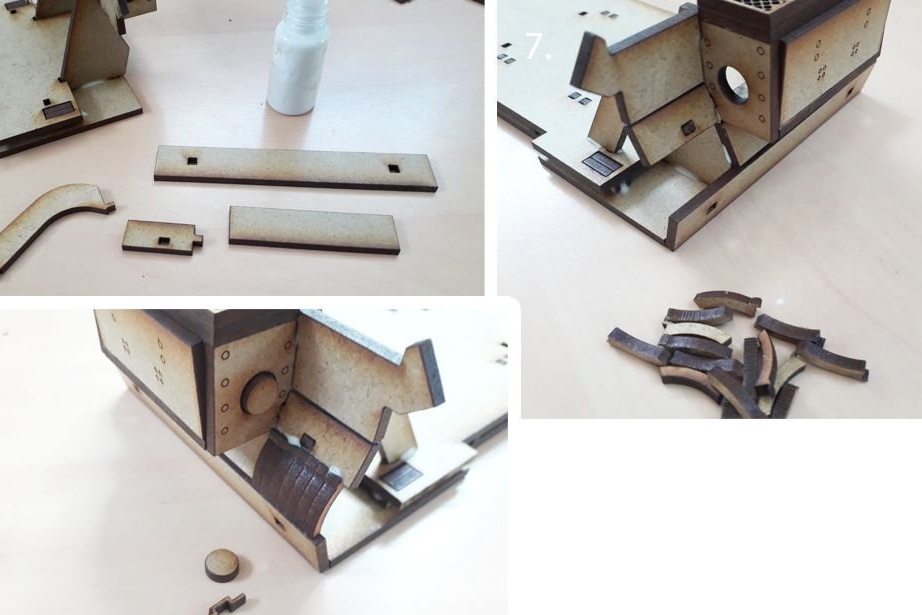
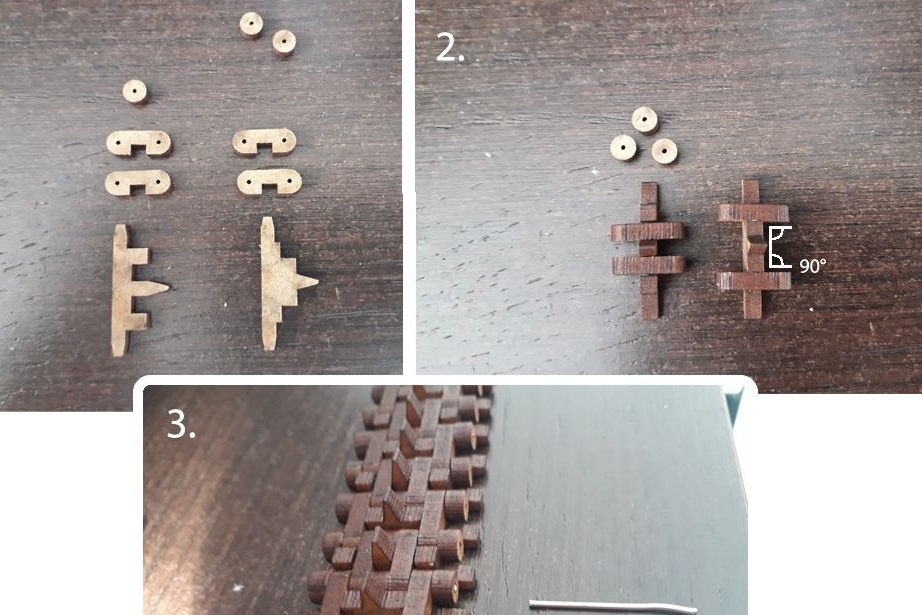
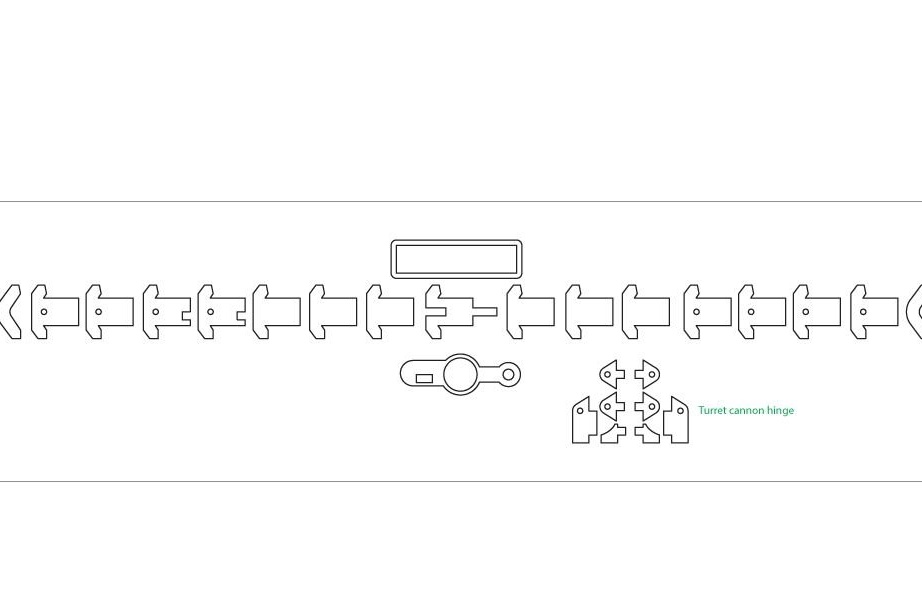
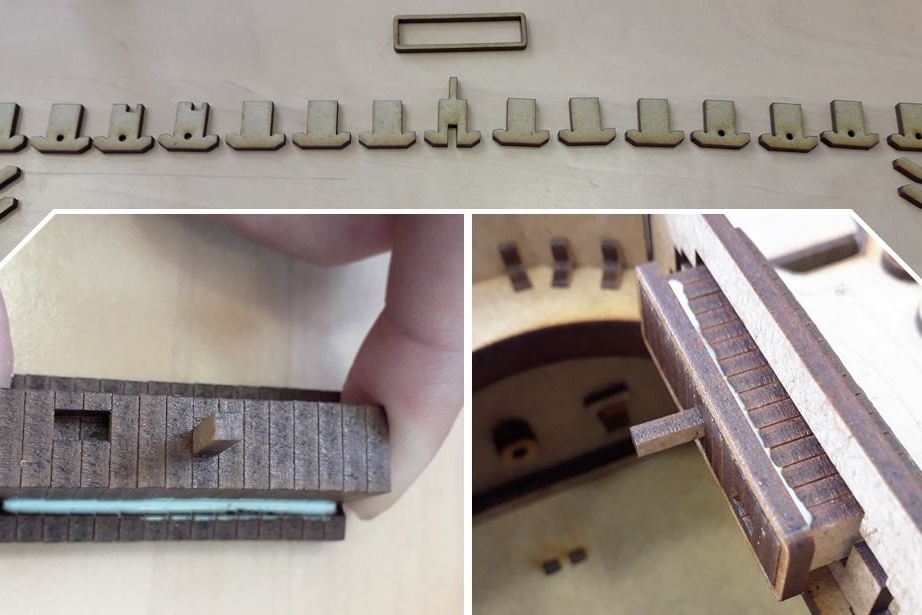
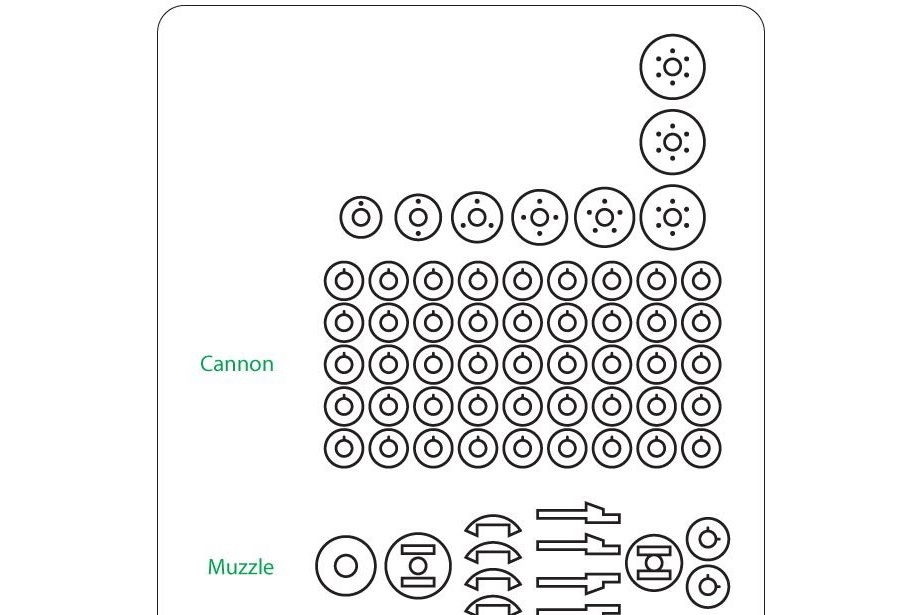
Bước bảy: Theo dõi
Thu thập các bản nhạc sâu bướm. Các bản nhạc được buộc chặt với nhau bằng một sợi dây mỏng. Trên các mặt của dây được cố định với mũ.
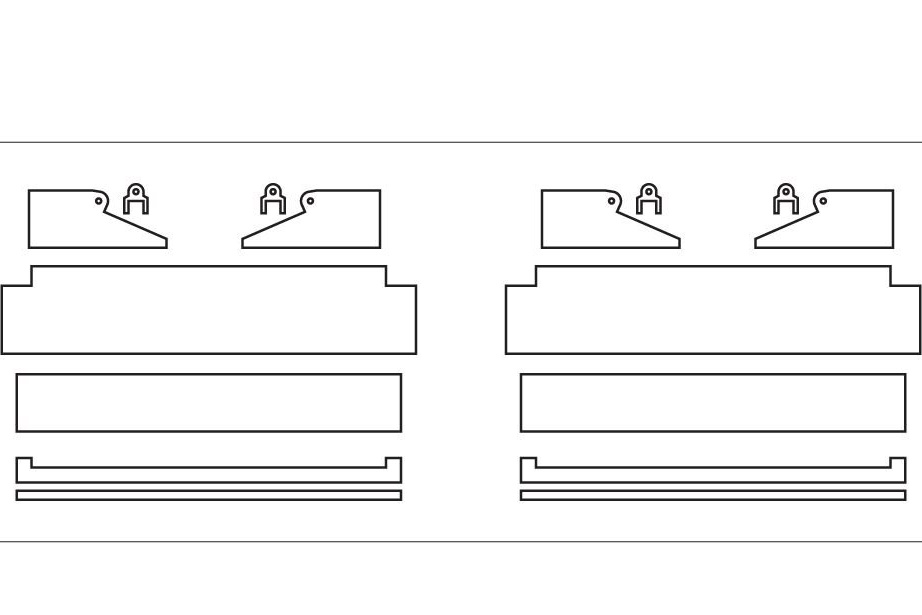
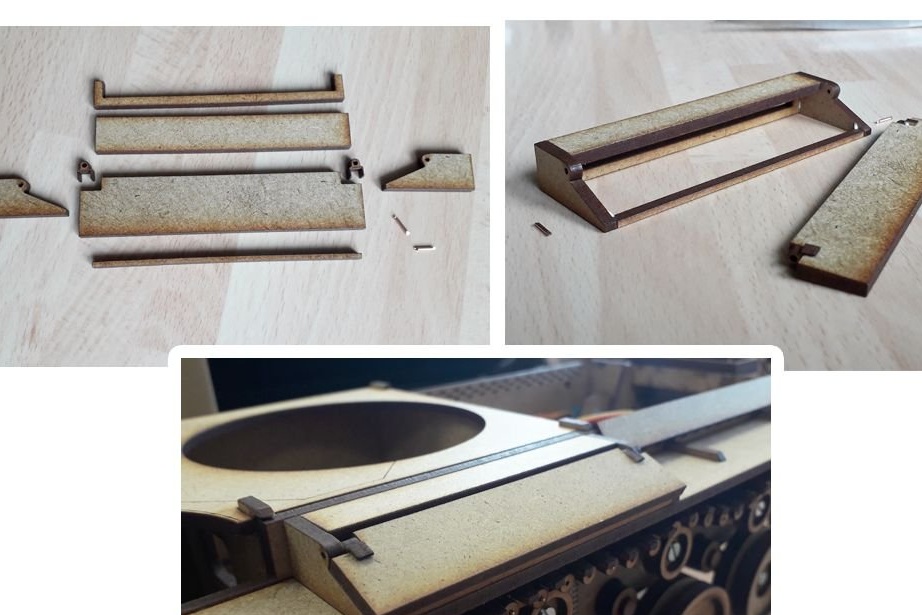
Bước tám: Bảo vệ chống bụi bẩn và ngăn kéo
Cài đặt khiên. Mặt trước của nắp có thể di chuyển và có thể được nâng lên.


Đặt ngăn kéo. Khi các vòng lặp, các mảnh dây được cài đặt.
Bước Chín: Mặt sau
Phần này nằm phía sau tòa tháp và nó sẽ bao phủ toàn bộ điện tử.
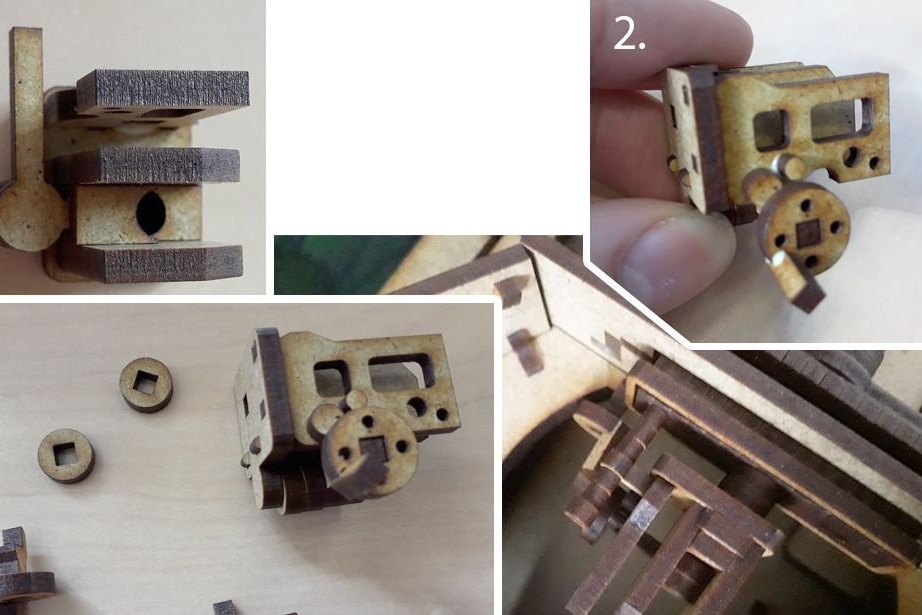
Bước mười: Tháp
Tập hợp các đỉnh của tháp và các bức tường bên.
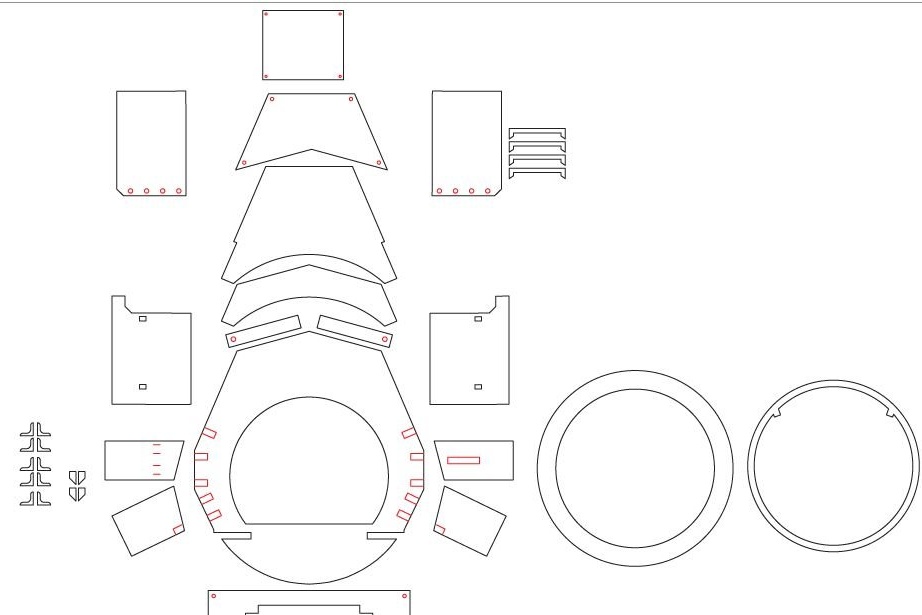
Dán keo súng.
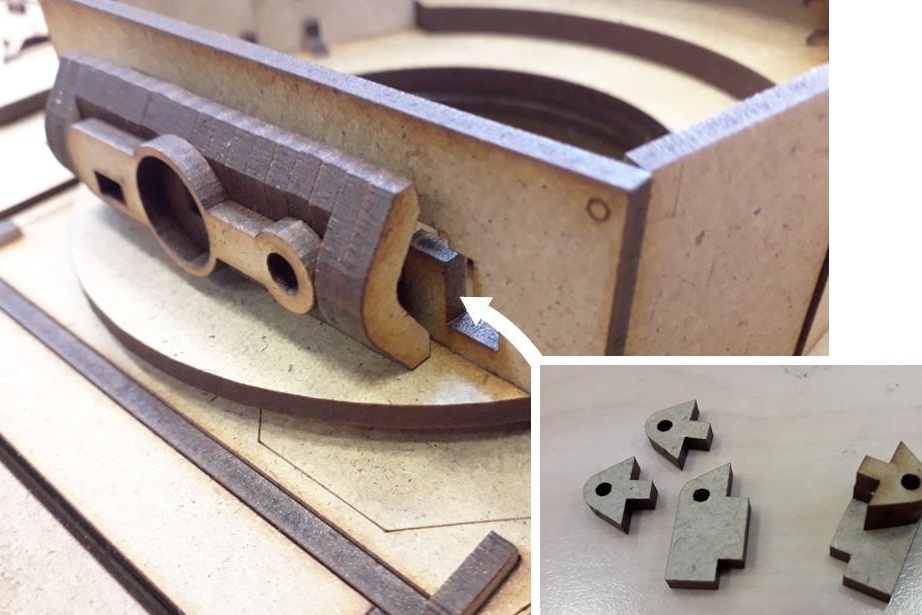
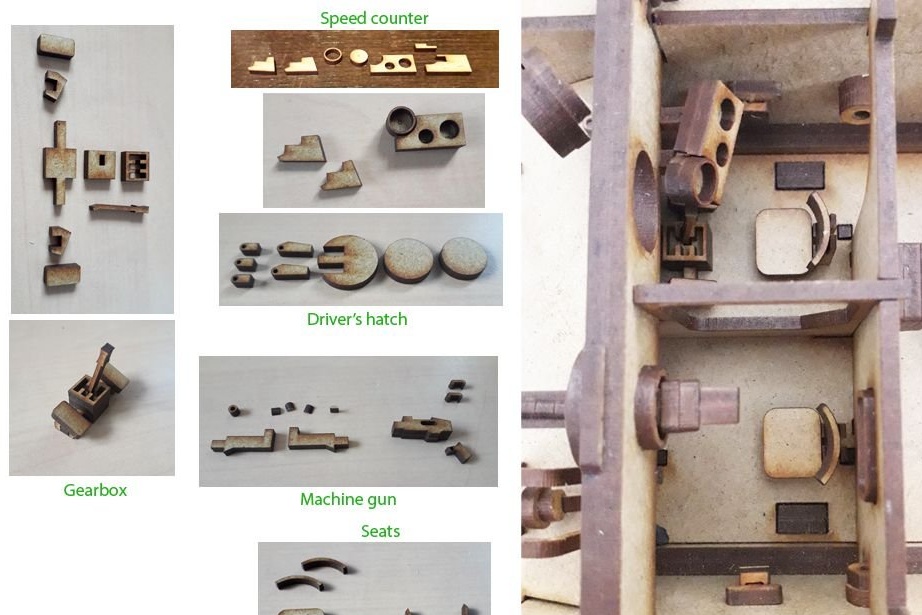
Đặt giá treo bên trong và cơ chế điều khiển súng.
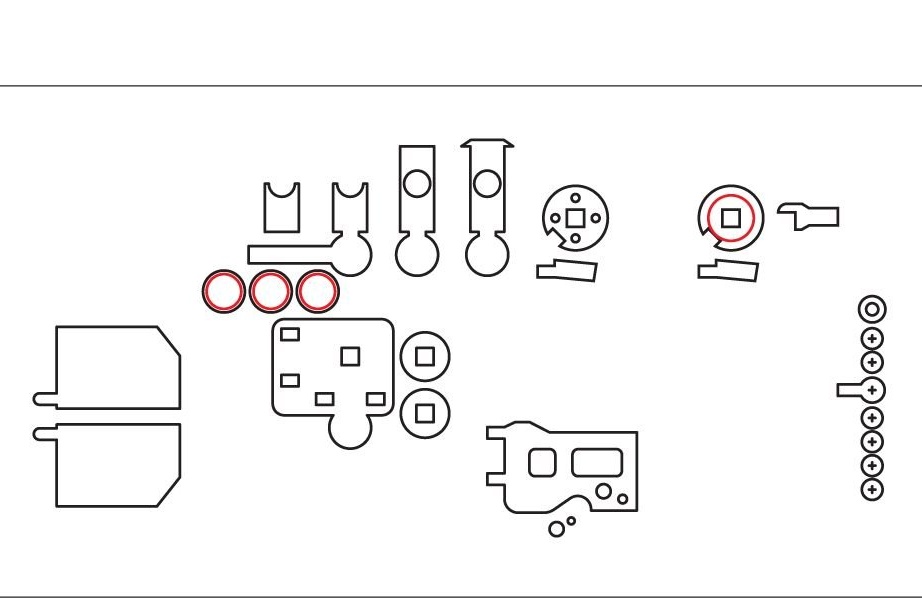

Bước mười một: súng
Thu thập một khẩu súng. Súng chính là một thanh kim loại. Các chi tiết còn lại được xâu chuỗi trên đó.

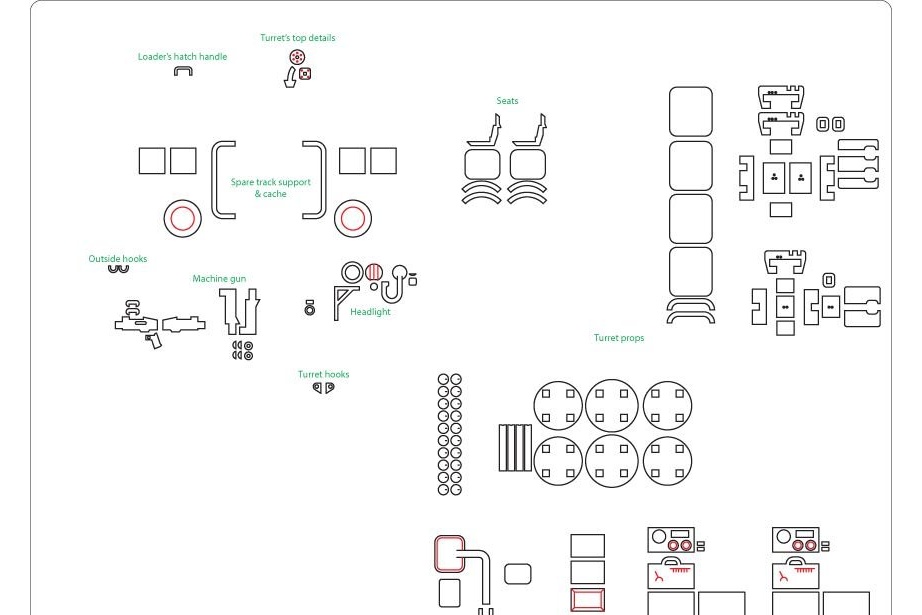
Bước 12: Chi tiết nhỏ
Đảm bảo các bộ phận nhỏ của bể.
Bên trong, bên trái có ghế ngồi và súng máy, bên ngoài nòng súng máy.
Ngay trên ghế lái: ghế ngồi, cần điều khiển và bàn đạp, cửa sổ trời.
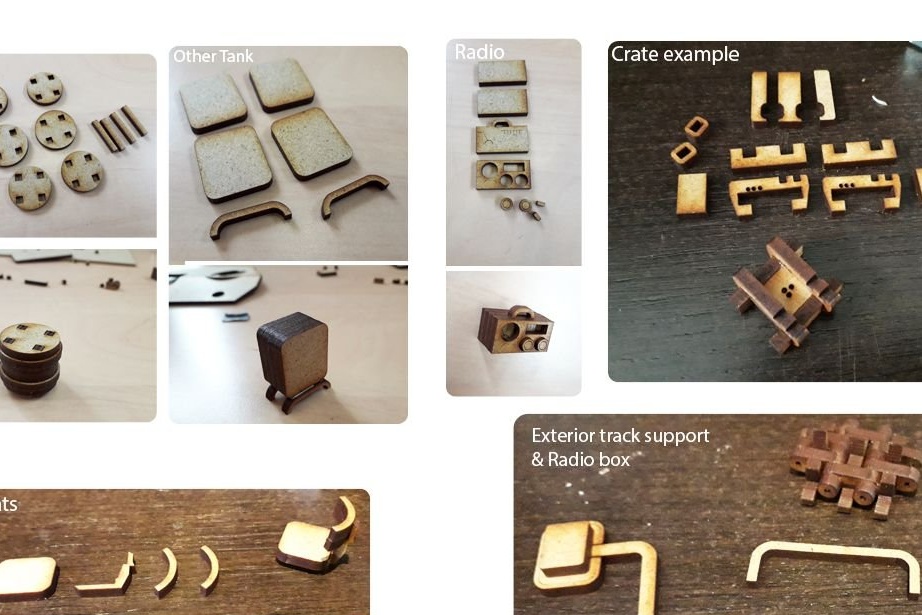
Bên ngoài: móc, đèn pha, hộp, đạn dược, dây cáp, v.v.
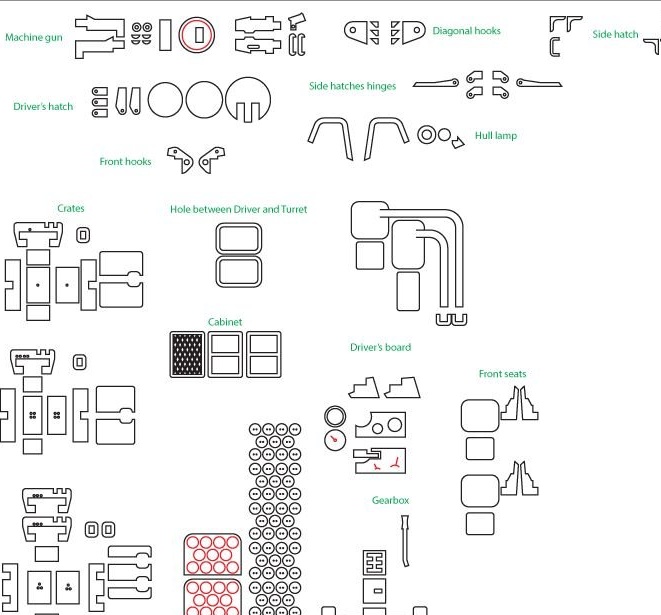

Một chiếc xe tăng dưới nước được cố định vào tháp, bộ đàm bên trong tòa tháp.

Bước mười ba: Điện tử
Cài đặt động cơ. Thực hiện lắp đặt phần điện tử theo sơ đồ.
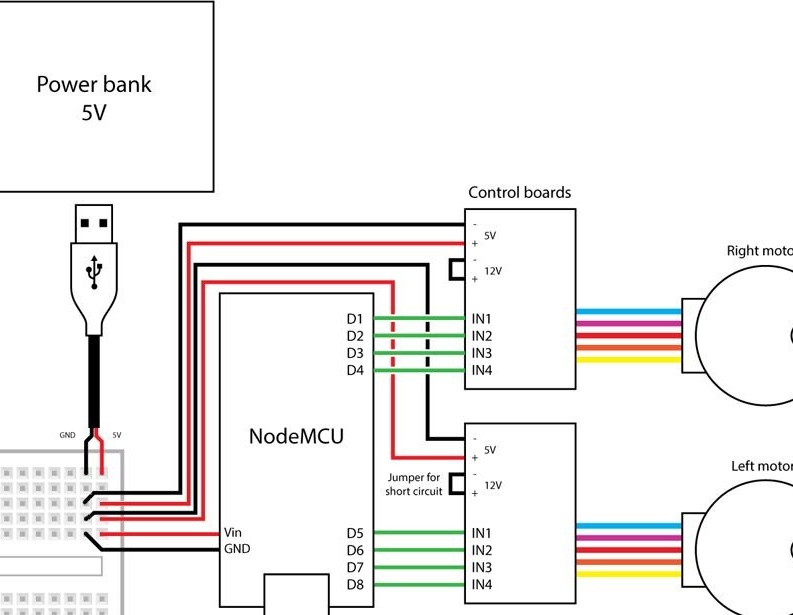

Để điều khiển không dây, tôi chọn bộ điều khiển NodeMCU. Mô hình được điều khiển thông qua NodeMCU và ứng dụng Blynk (có sẵn trên Android / iOS). Ứng dụng này cung cấp HUD có thể tùy chỉnh hoàn toàn để kiểm soát từ bất kỳ Arduino hoặc điện thoại iOS qua WiFi.
Vì vậy, sau khi cài đặt ứng dụng, điều đầu tiên cần làm là tạo một tài khoản.
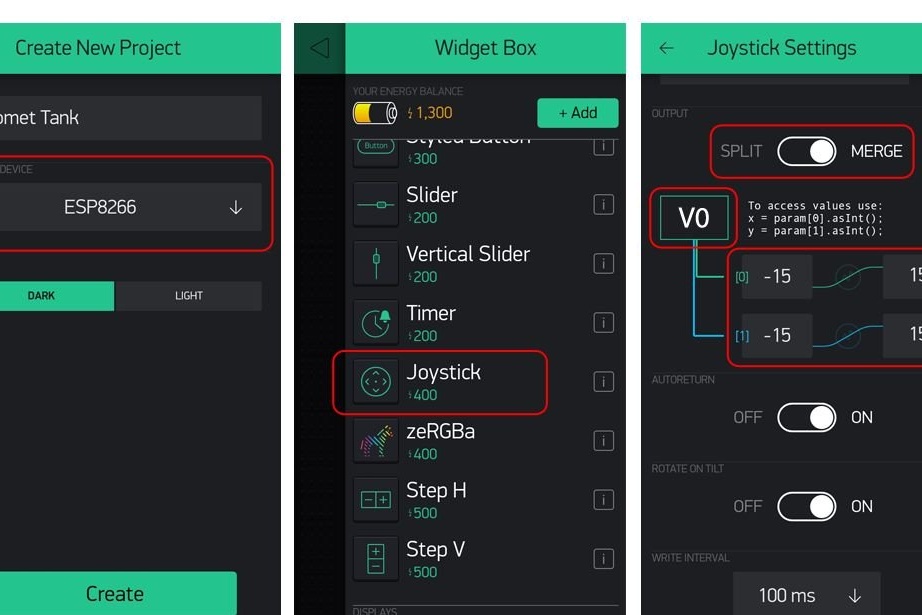
Tạo một dự án mới và gán ESP8266 (chip NodeMCU) làm vi điều khiển và đặt chế độ WiFi.
Ngay khi bạn lần đầu tiên nhìn thấy HUD của mình, hãy tạo một phím điều khiển. Gửi thông tin cần điều khiển đến chân ảo V0 của nút.
Khi bạn đã tạo một phím điều khiển, nhấp vào nó để mở cài đặt của nó. Tại các vị trí X và Y, đặt phạm vi từ -15 đến 15.
Cài đặt thư viện.
Đầu tiên, tải thư viện Stepper2 tại đây: https://github.com/udivankin/Stepper2
Thư viện này là một lựa chọn tốt cho động cơ bước giá rẻ, chẳng hạn như động cơ mà chủ sử dụng. Nó quản lý tốt hơn các pha động cơ và cung cấp mô-men xoắn tốt hơn. Sau khi tải xuống tệp .zip, hãy cài đặt nó từ phần mềm Arduino: Phác thảo> Bao gồm Thư viện> Thêm Thư viện .ZIP ... và chọn tệp.
Sau đó, nếu bạn chưa bao giờ flash NodeMCU, bạn cần một máy tính để nhận ra nó. Arduino IDE có trình quản lý bảng trong đó các trình điều khiển chính xác được cài đặt.
Sao chép dòng sau:
https://arduino.esp8266.com/urdy/package_esp8266com_index.jsonMở cài đặt và dán chúng vào các URL. Lưu cài đặt và chuyển đến trình quản lý bộ điều khiển trong Công cụ> Bảng> Trình quản lý bảng. Thẻ ESP8266 phải có mặt ở cuối danh sách. Trình hướng dẫn đã chọn phiên bản 2.5.0 với IDE trong 1.8.9.
Bạn cũng cần thư viện Blynk, có thể tìm thấy tại Phác thảo> Bao gồm Thư viện> Quản lý thư viện ... và sau đó tìm Blynk trong trường tìm kiếm.
Chuyển đến cài đặt dự án và gửi mã thông báo đến địa chỉ của bạn, đây là một chuỗi lớn cho phép điện thoại của bạn nhận ra NodeMCU khi được bật. Sao chép mã thông báo từ thư nhận được gần đây của bạn và dán nó vào mảng xác thực.
Bây giờ bạn có thể cài đặt phần sụn.
Sao chổi
Mọi thứ đã sẵn sàng, bây giờ bạn có thể tận hưởng công việc của bạn.