
Gần đây tôi đã chế tạo hàng tá robot, chủ yếu lấy cảm hứng từ những điều kỳ diệu của robot BEAM. Nếu bạn không quen thuộc với công nghệ này, BEAM là một phương pháp đặc biệt để xây dựng robot với trọng tâm B - sinh học, E - điện tử (điện tử), A- thẩm mỹ (thẩm mỹ) và M - cơ học (cơ học). Đây là từ viết tắt BEAM. Điều tách biệt công nghệ này với các phương pháp khác là việc chỉ sử dụng năng lượng bức xạ cho dinh dưỡng (chủ yếu là năng lượng mặt trời), xử lý các vật liệu khác nhau (tái sử dụng) và tối giản. Mặc dù tôi đã áp dụng những nguyên tắc này, của riêng tôi robot không hoàn toàn theo tinh thần BEAM (chúng được cung cấp bởi pin).
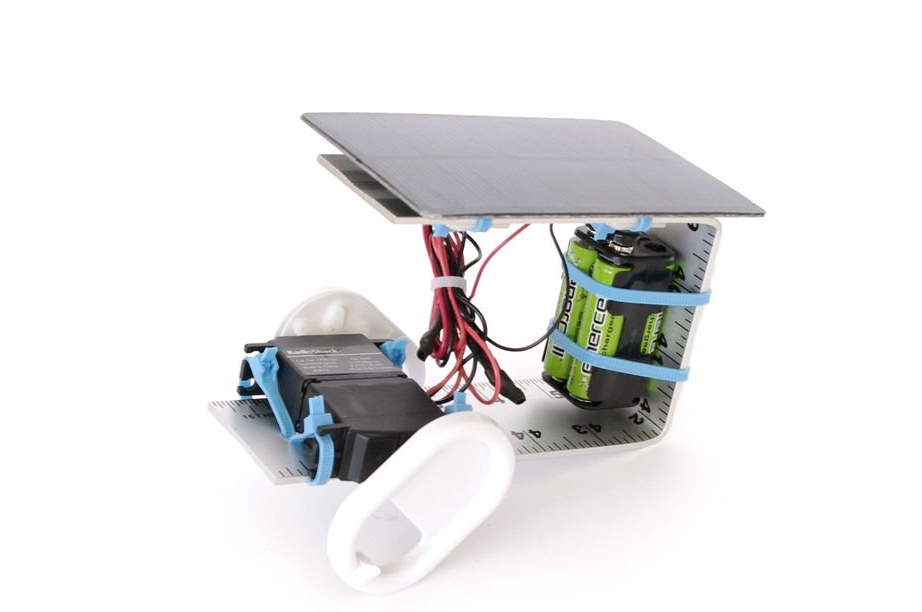
Vì robot BEAM đã truyền cảm hứng cho tôi một cách nghiêm túc, tôi muốn chế tạo một robot chạy bằng năng lượng mặt trời. Nhưng thay vì chỉ chế tạo một con robot BEAM, tôi quyết định tích hợp một tấm pin mặt trời vào con robot theo phong cách thông thường của tôi. Thay vì được cung cấp năng lượng hoàn toàn bởi mặt trời, tôi quyết định chế tạo pin sạc. Đó là, robot của tôi có thể được cung cấp năng lượng từ pin hoặc từ bảng điều khiển năng lượng mặt trời, tùy thuộc vào nguồn năng lượng nào hiện tại mạnh hơn. Bảng điều khiển năng lượng mặt trời cũng sạc pin khi ánh sáng mặt trời chiếu vào. Điều này cho phép robot di chuyển cả trong ánh sáng và trong bóng râm.
Tôi nghĩ cách tiếp cận này kết hợp thành công hai phong cách, và đây là một thử nghiệm thú vị trong việc chế tạo robot.
Bước 1: Vật liệu
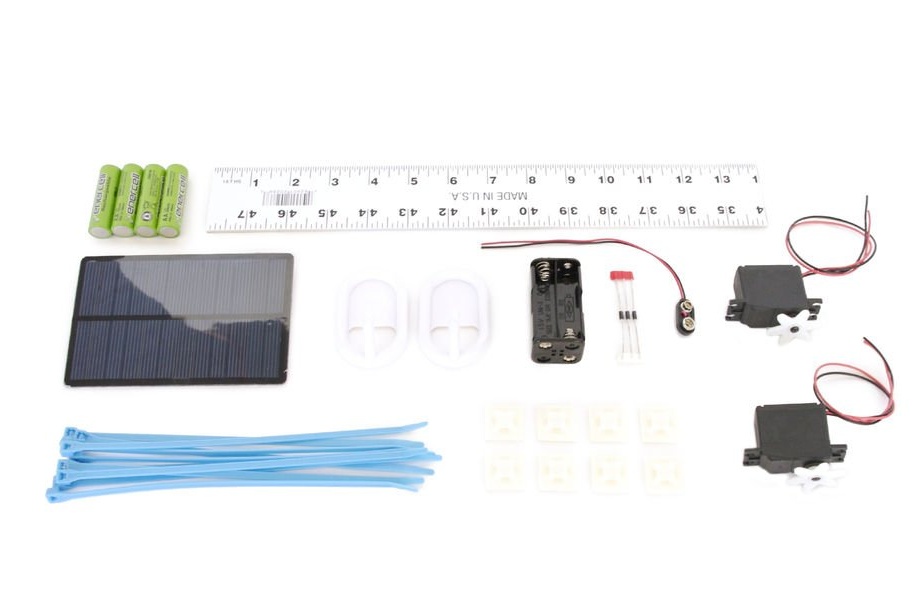
Bạn sẽ cần:
(x1) Bảng điều khiển năng lượng mặt trời
(x2) Động cơ tiêu chuẩn
(x3) Điốt Schottky 1N5817 - Tương đương NTE578
(x1) pin 9V
(x8) Pin AA có thể sạc lại
(x1) 8 x pin AA
(x12) Đế cho kẹp
(x1) Thước (30 - 50 cm)
(x2) Móc dính treo tường
(x1) Kẹp nhựa
(x1) Ống co nhiệt
Bước 2: Sửa đổi Servo

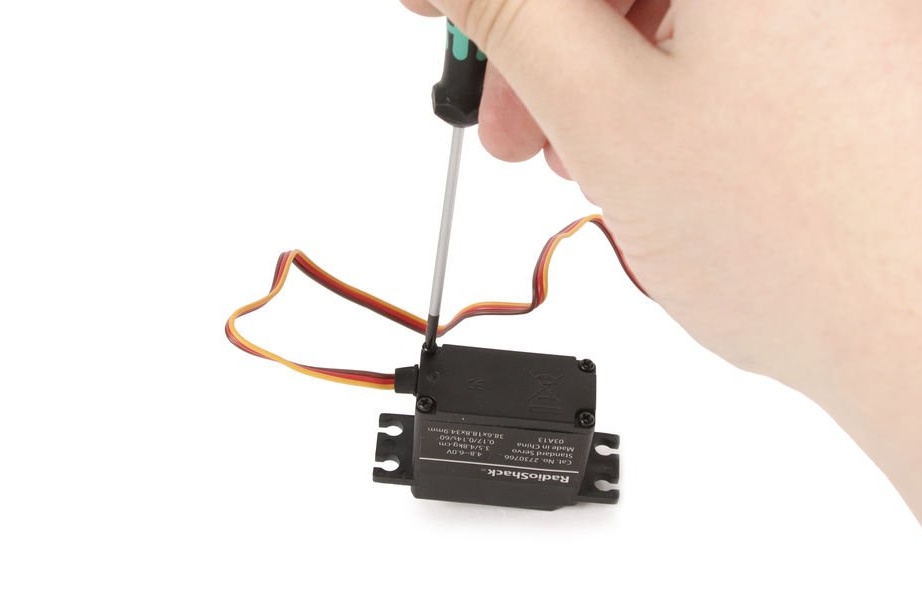
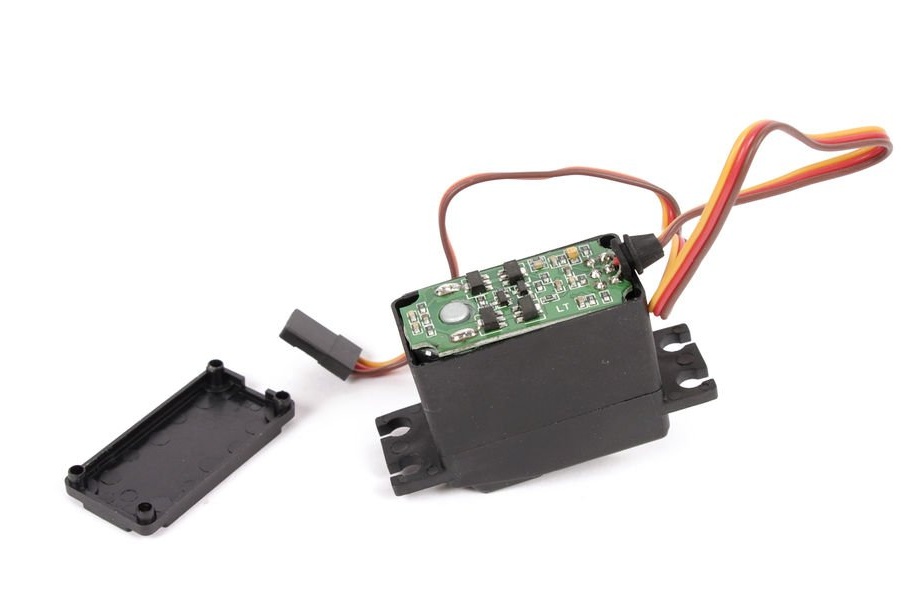
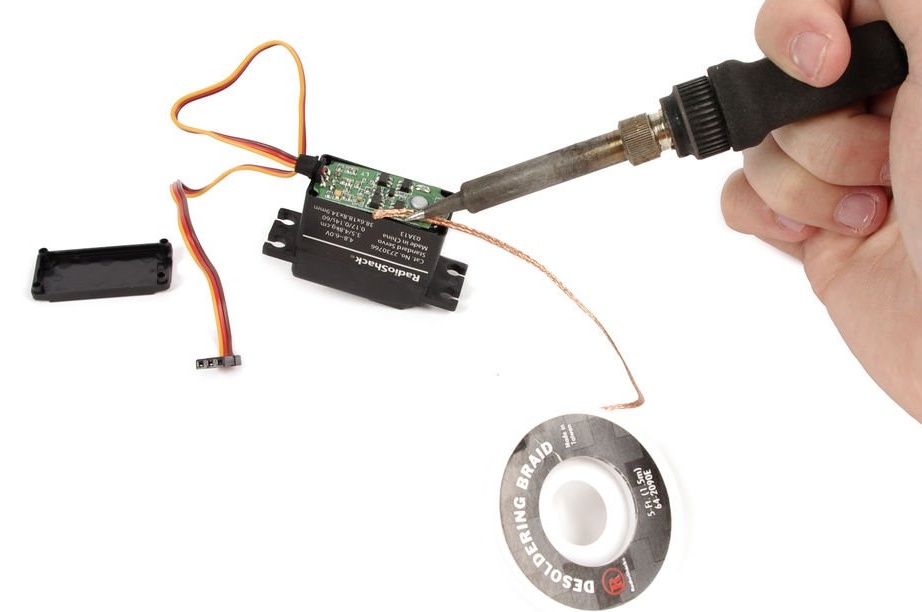
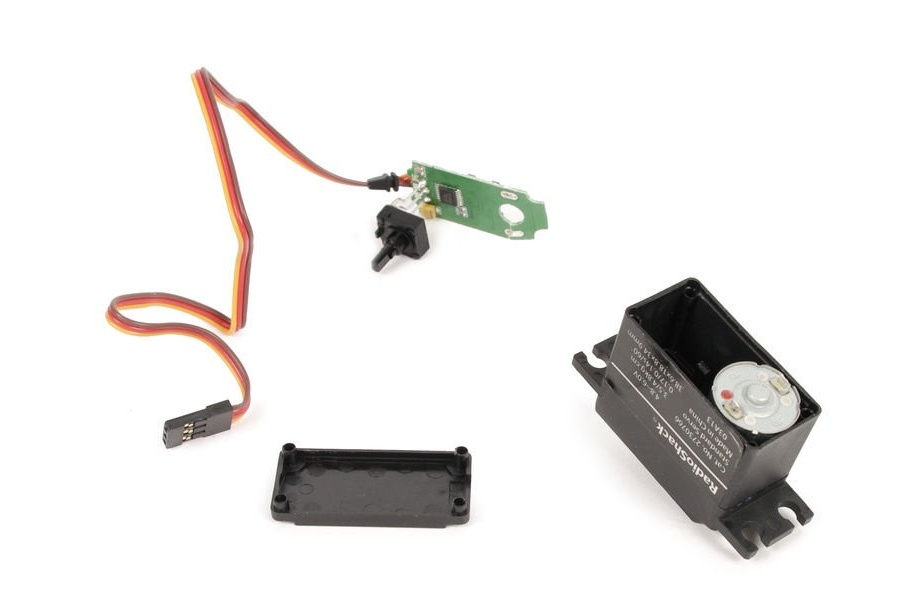




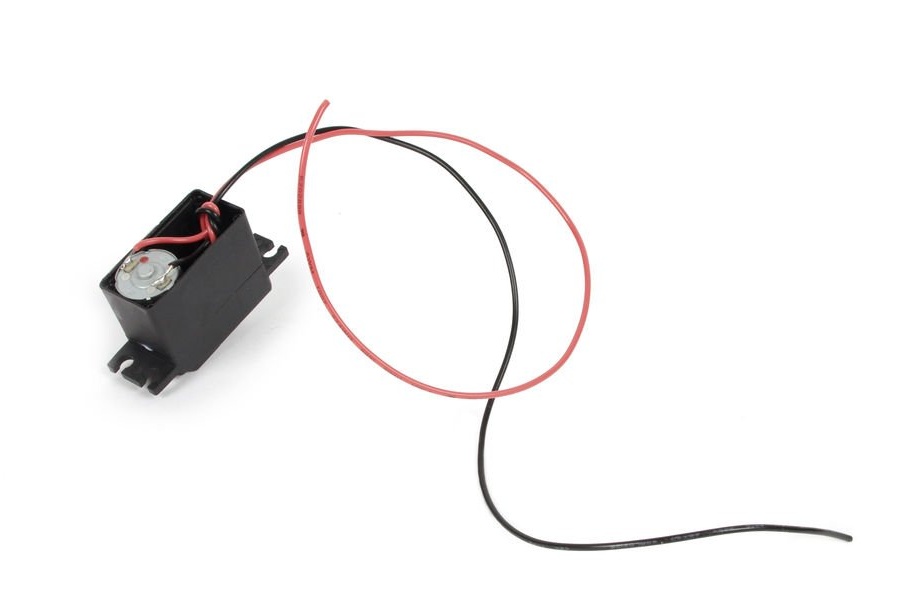
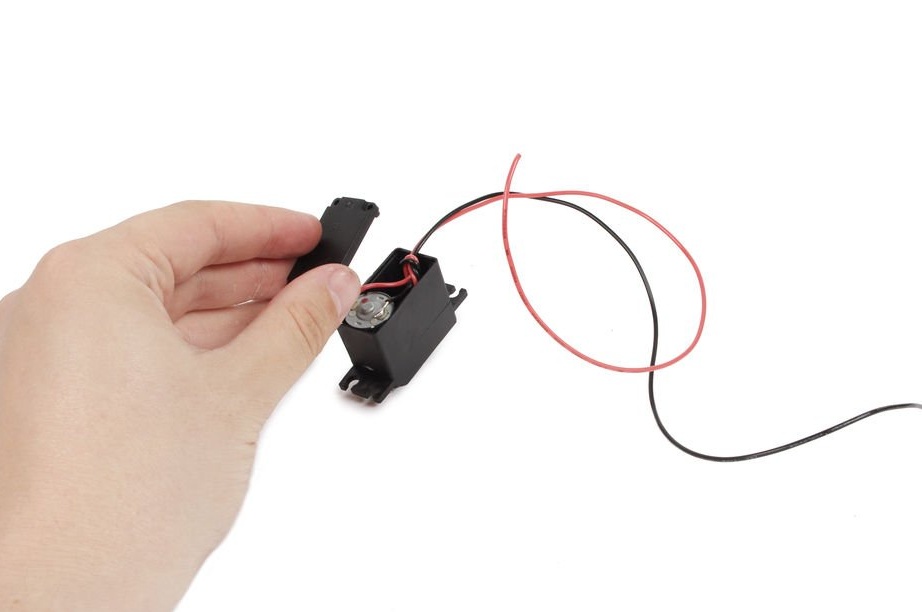

Mở vỏ servo bằng cách tháo 4 ốc vít ở bảng dưới cùng. Giải nén bảng bên trong và kết nối dây màu đỏ và đen với mỗi thiết bị đầu cuối của ổ đĩa.
Mở ổ bánh răng và tìm bánh răng có nắp nhựa nhỏ ngăn xoay liên tục. Cắt nắp từ bánh răng.
Bước 3: Khoan
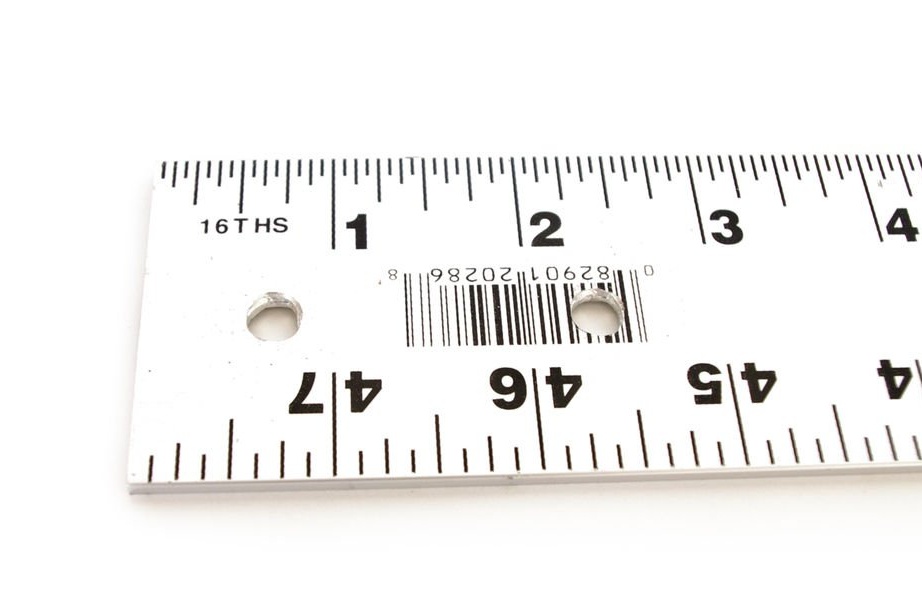


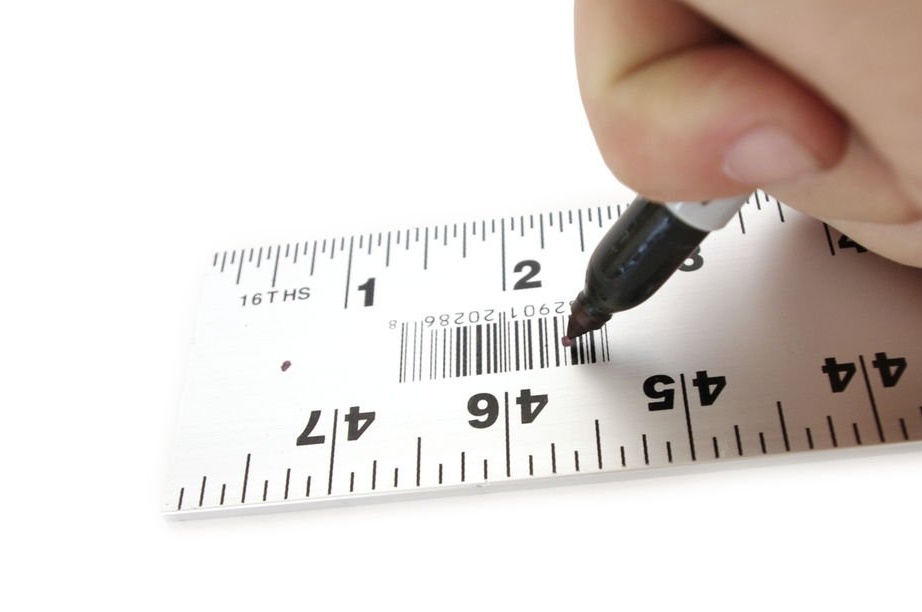
Khoan một lỗ một phần tư inch (6,3 mm) ở giữa thước, cách mép ngắn khoảng 15 mm. Khoan một lỗ thứ hai khoảng 60 mm từ cùng một cạnh.
Bước 4: Uốn cong

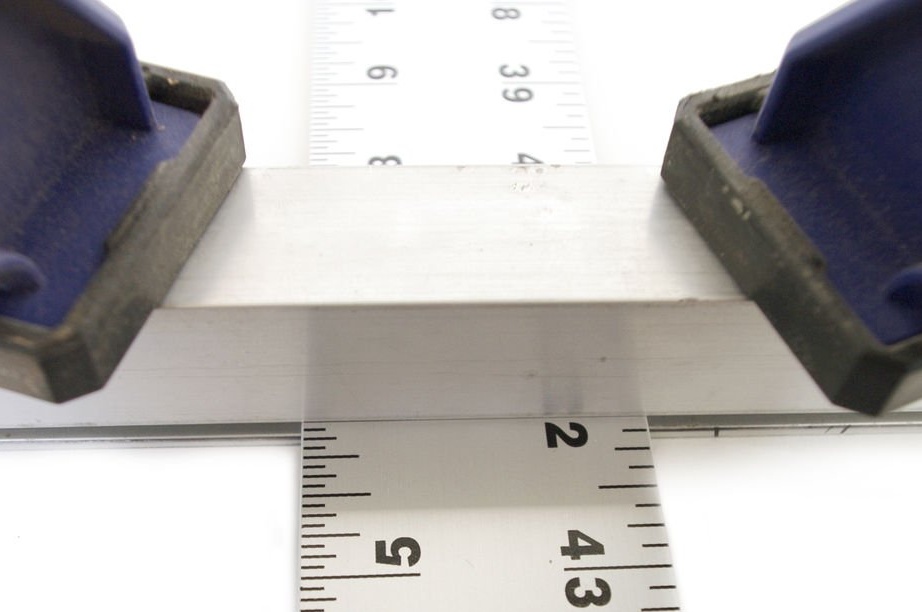
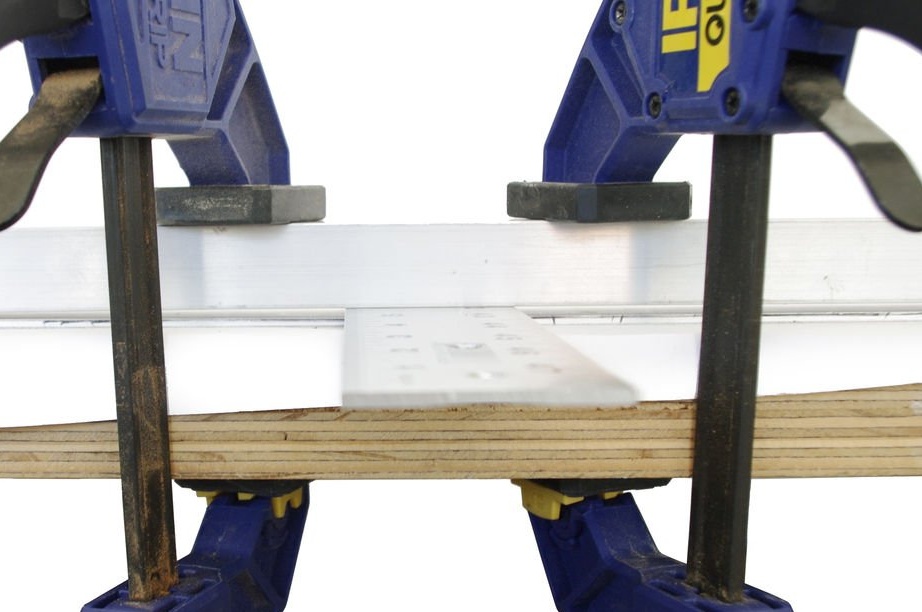

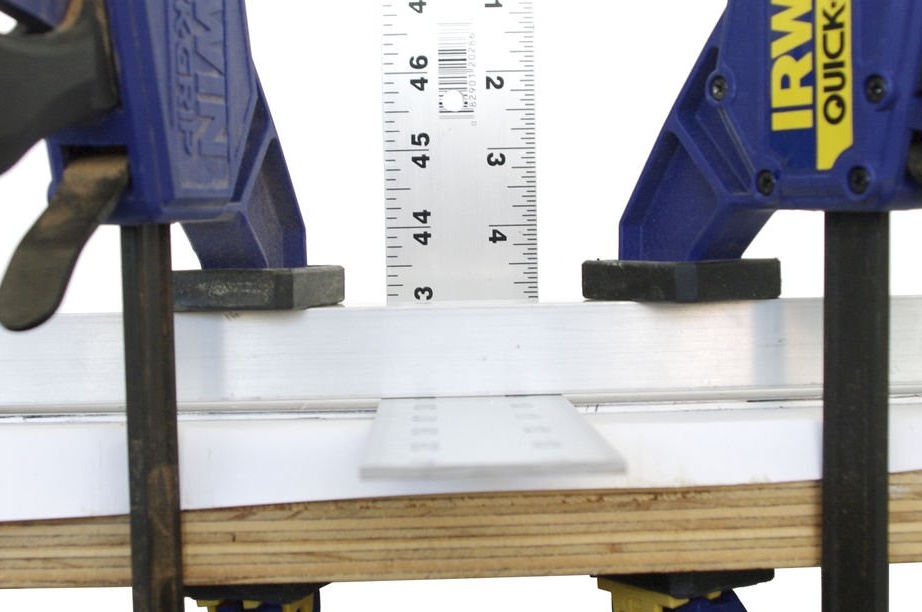

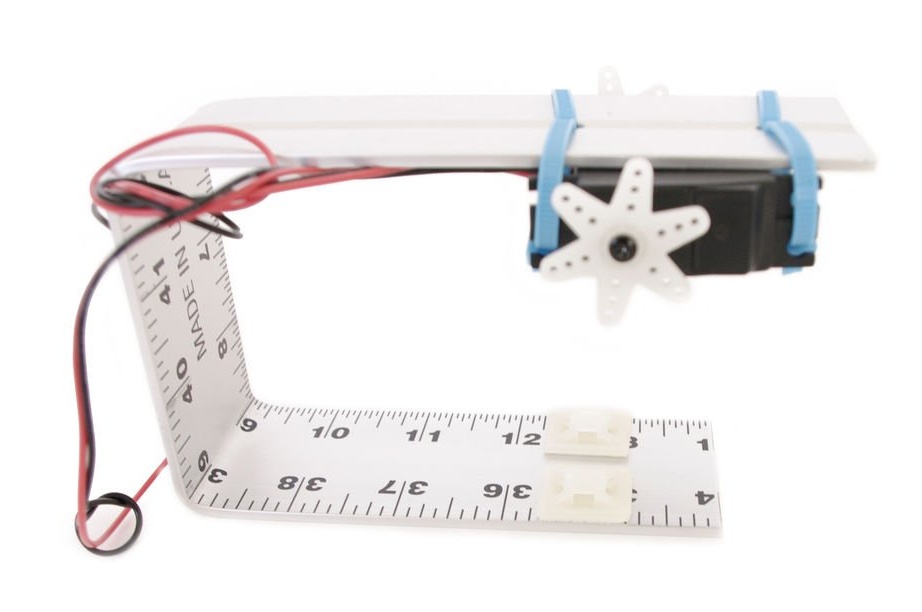
Sử dụng một cái kẹp hoặc hai tấm kim loại kẹp trên cạnh bàn, uốn cong thước ở góc 90 độ ở khoảng cách 15 cm so với cạnh trong đó các lỗ được khoan.
Thực hiện uốn cong tương tự ở một góc 90 độ ở khoảng cách 15 cm so với cạnh kia. Bạn sẽ nhận được một hình dưới dạng chữ P.
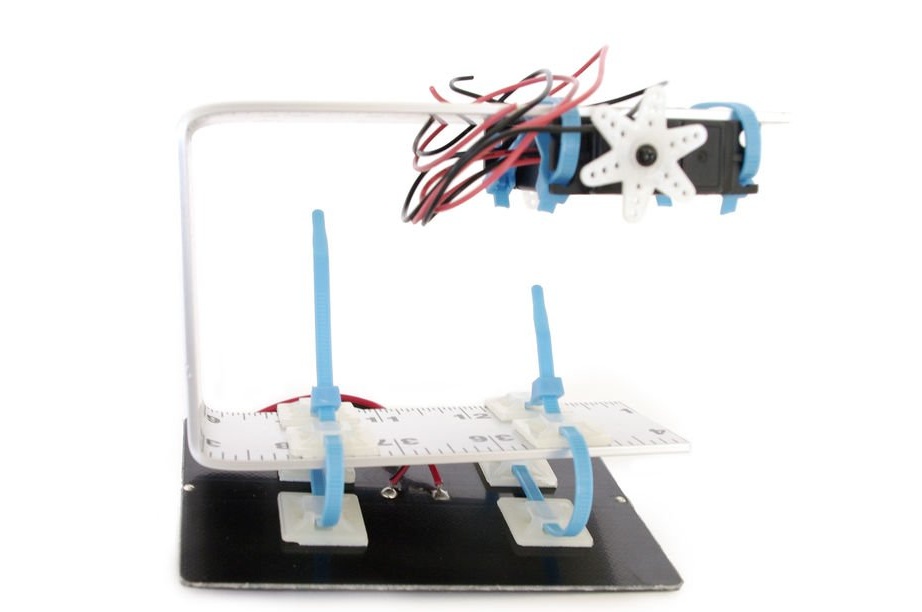
Bước 5: Kết nối
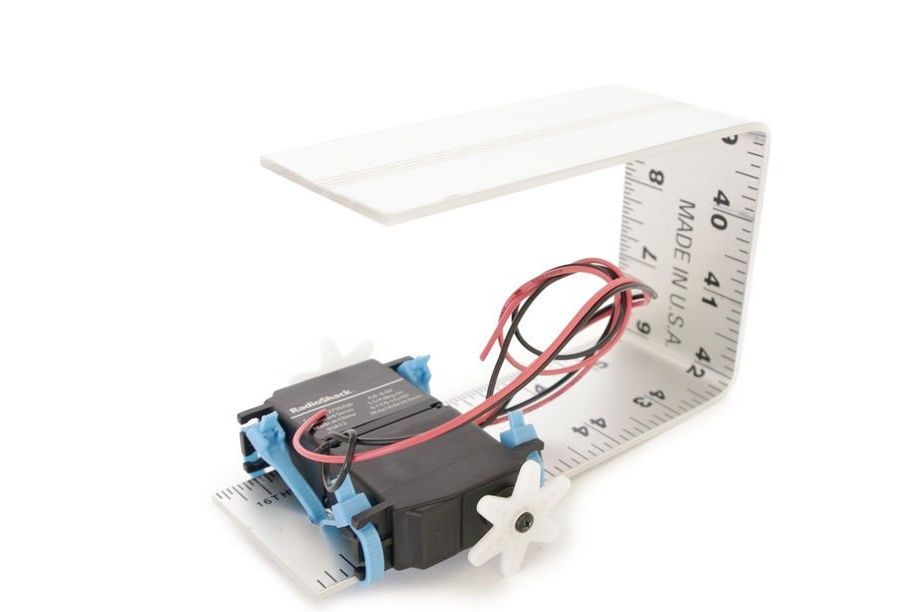

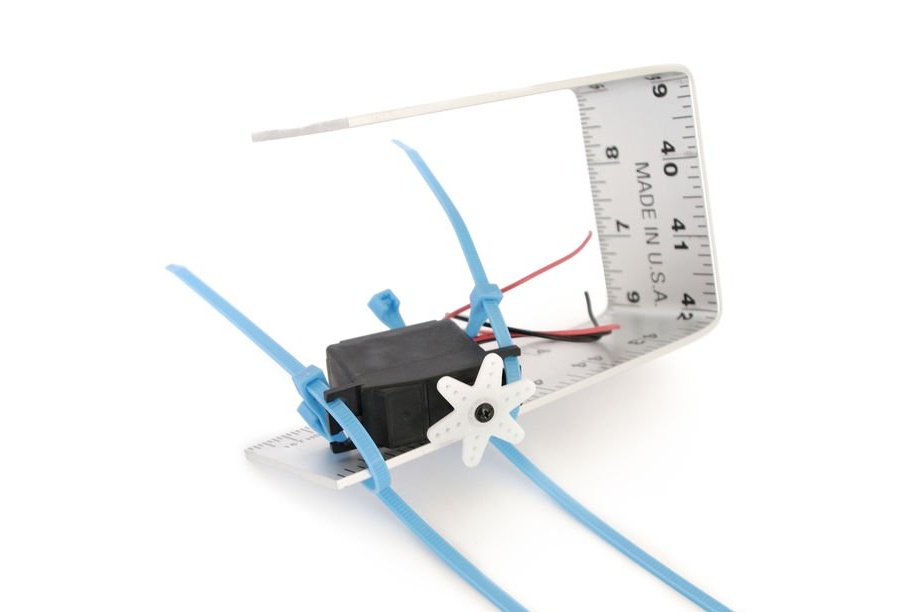
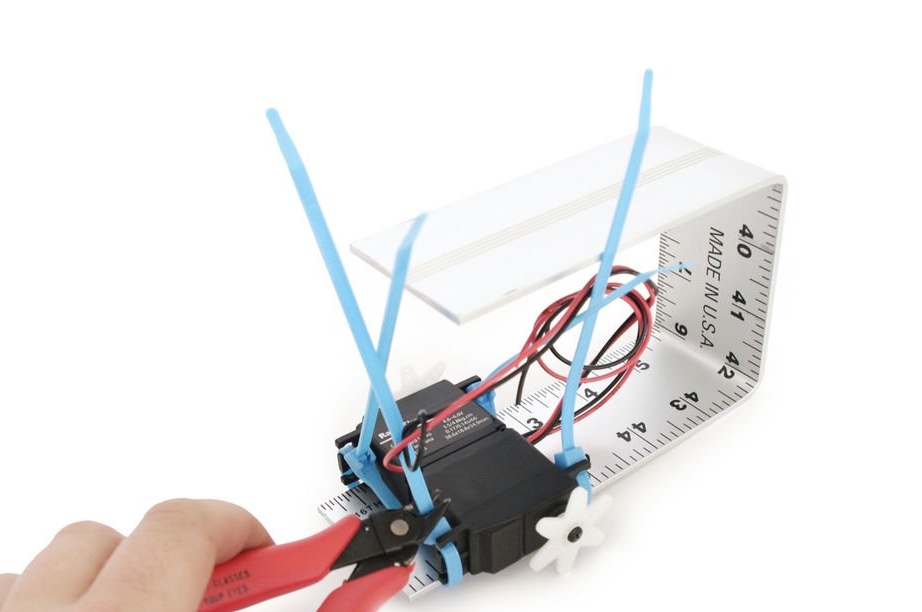
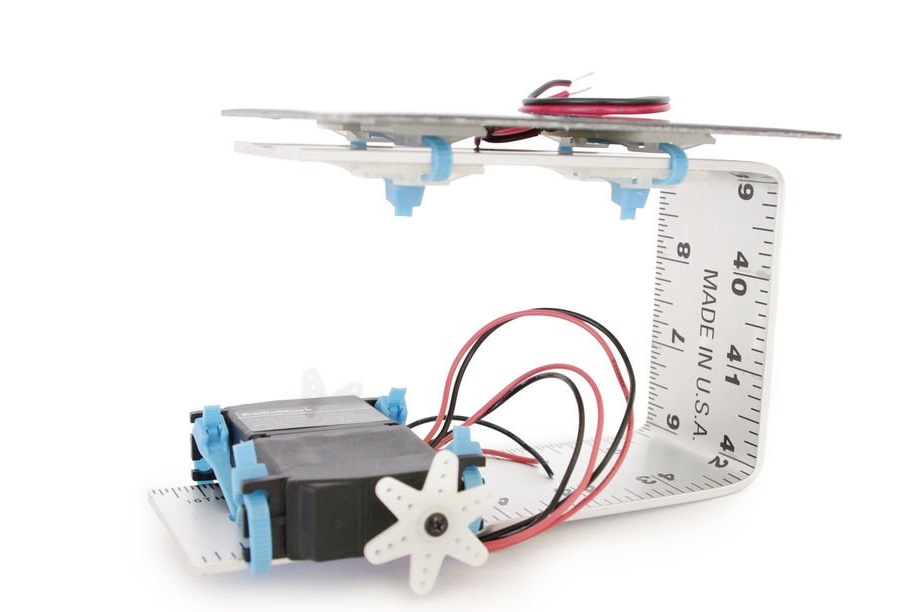
Nó là cần thiết để cố định các servo trên đường dây bằng kẹp nhựa, thông qua các lỗ khoan. Nhân viên phục vụ phải ngồi quay lưng vào nhau.
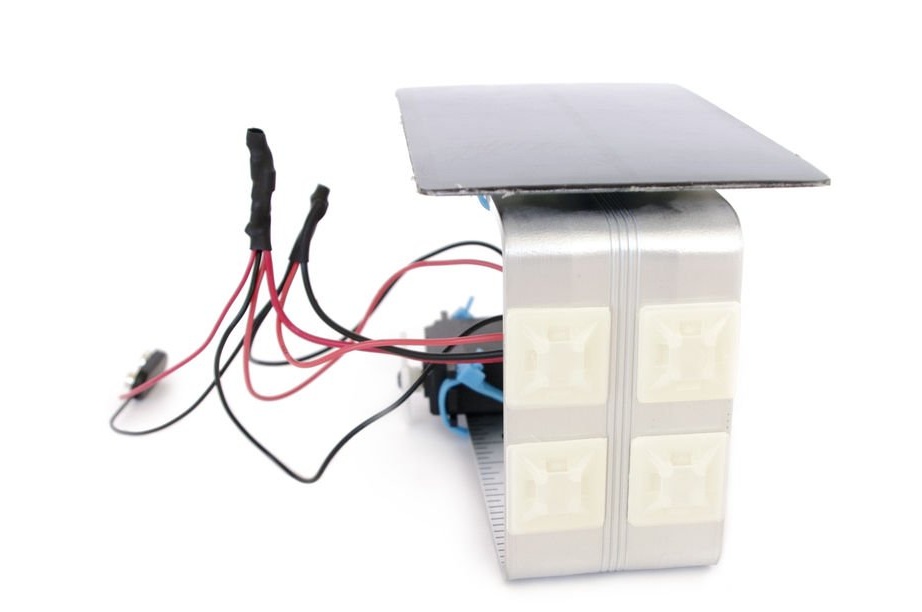
Bước 6: Đế cho kẹp
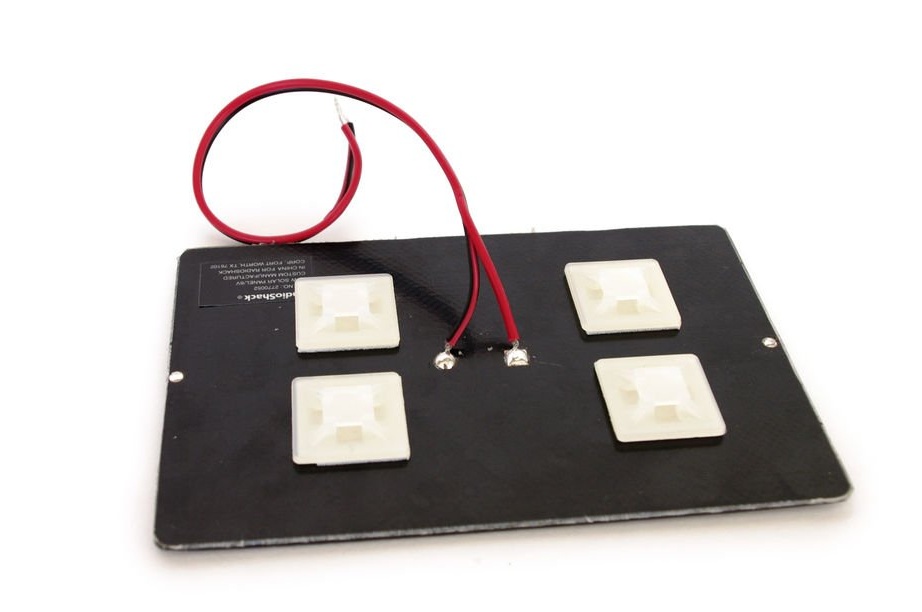

Đặt hai cặp đế kẹp cạnh nhau ở mặt sau của tấm pin mặt trời. Điều quan trọng là các kênh của mỗi cặp nằm trên cùng một dòng.
Bước 7: Thêm lý do
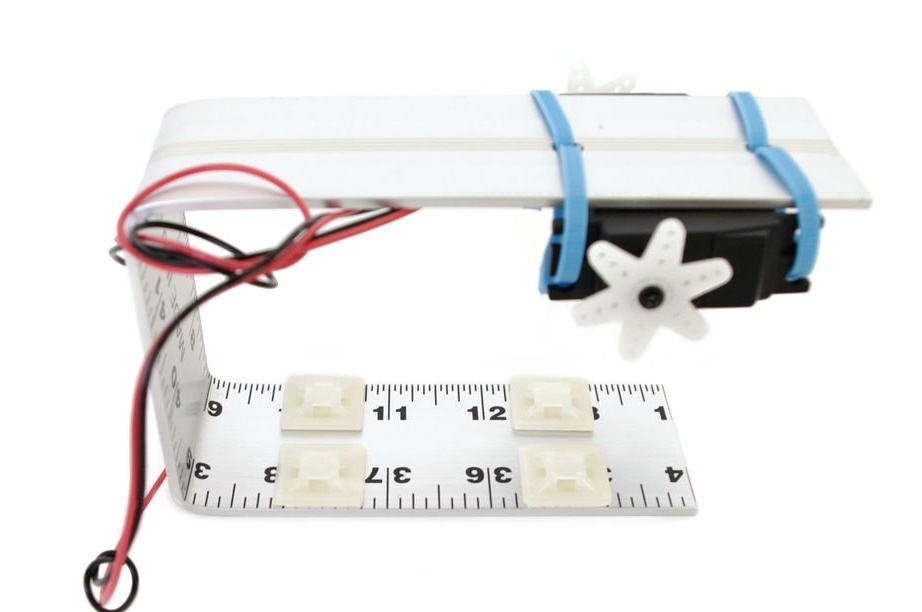
Gắn thêm hai chân đế vào bên trong thanh chữ U, ở phía đối diện với các servo.
Bước 8: Kết nối
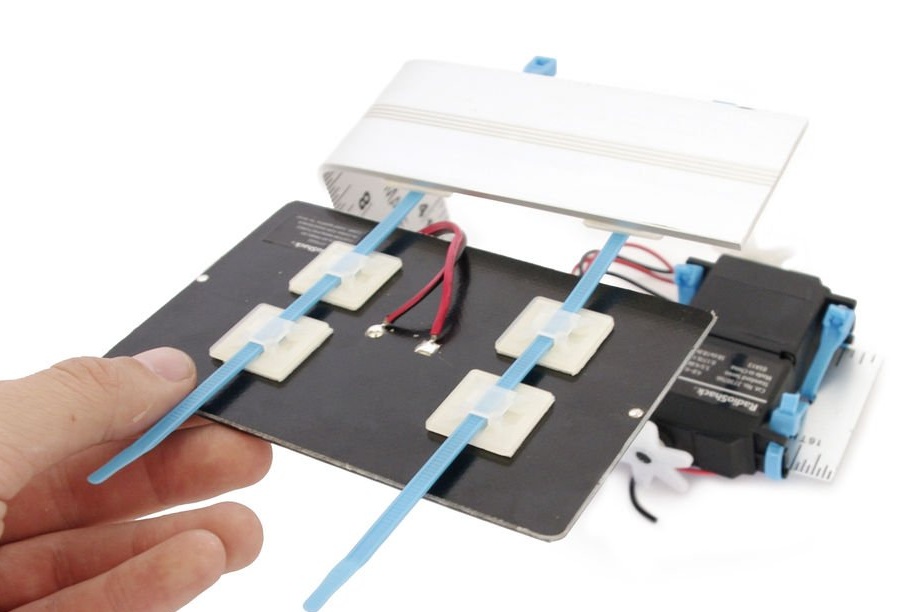
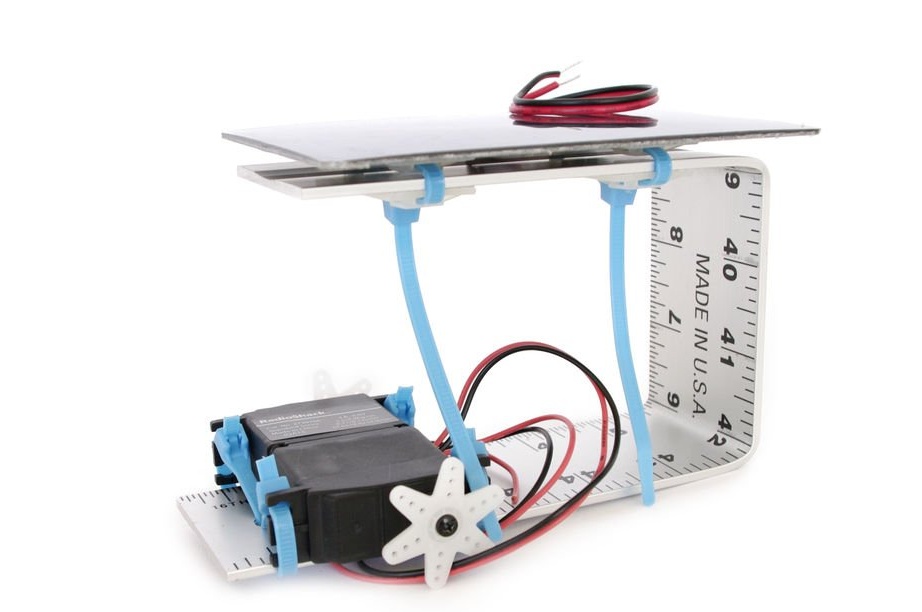
Gắn bảng năng lượng mặt trời bằng kẹp thông qua các cơ sở cố định.
Bước 9: Lắp pin


Lắp pin vào bộ pin.
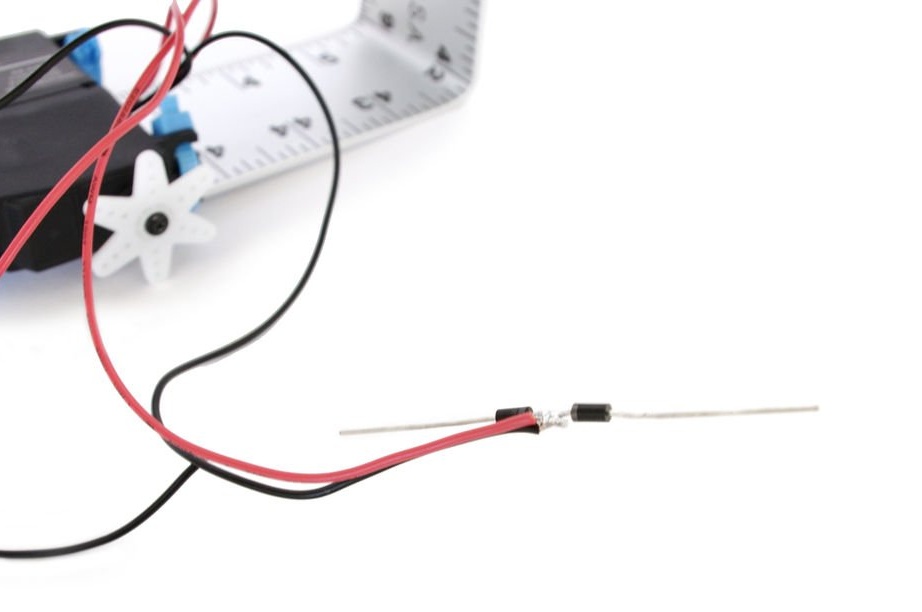
Bước 10: Điốt

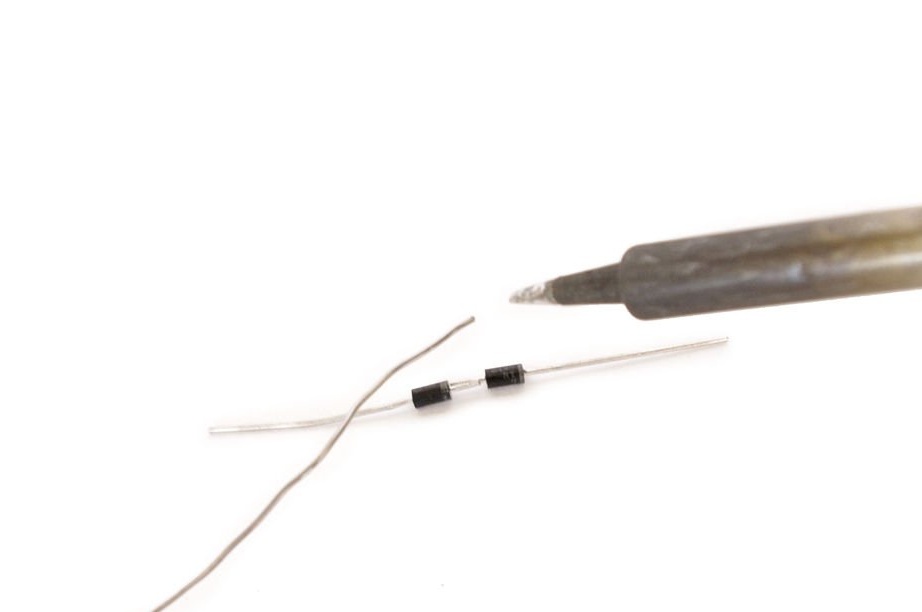
Hàn hai điốt cùng với cực âm (bên của điốt với rãnh).
Bước 11: lắp ráp dây chuyền
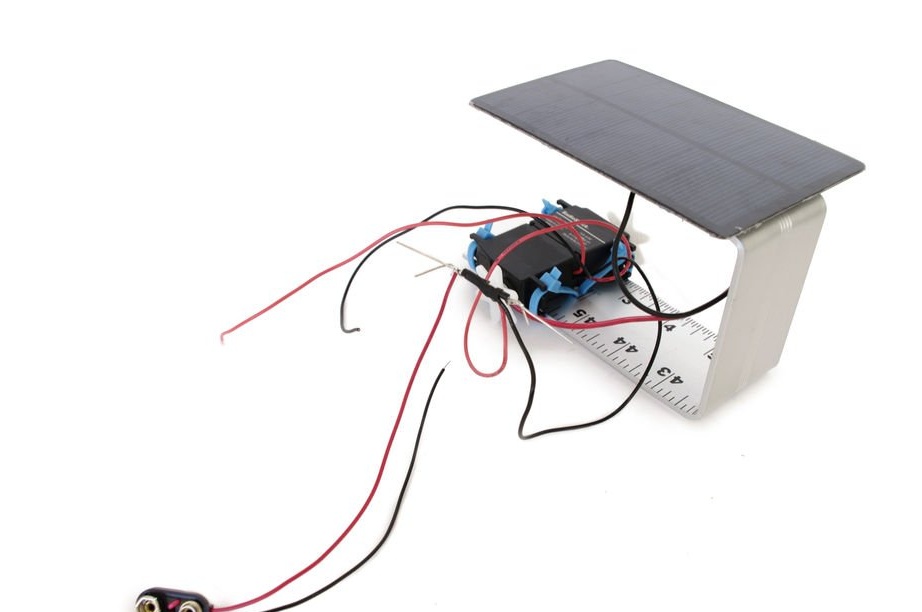
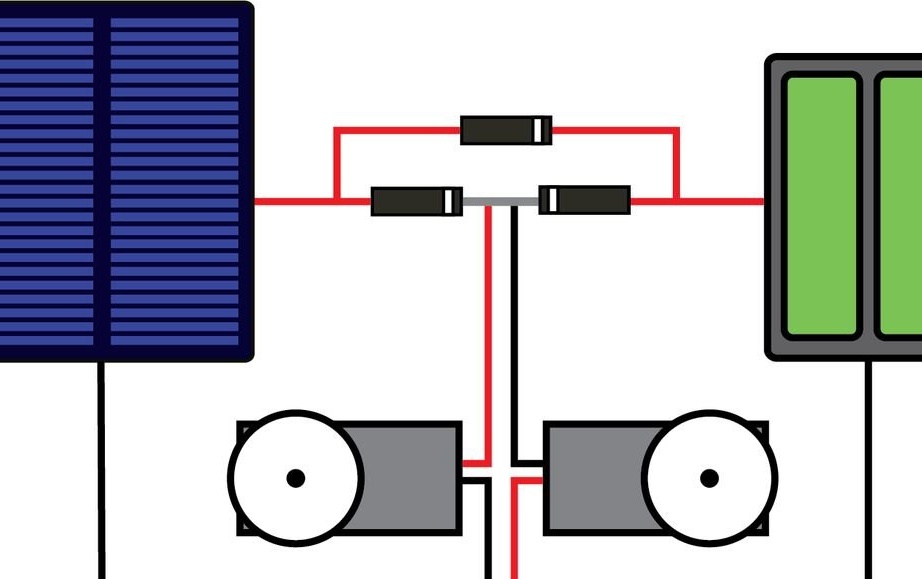
Mạch cho robot này dựa trên mạch sạc năng lượng mặt trời đơn giản của David Cook. Mạch chứa hai điốt Schottky được kết nối bởi một cực âm, một diode được kết nối với một bảng điều khiển năng lượng mặt trời và một trong các pin. Cấu hình này cho phép bạn được cung cấp năng lượng bởi cả pin và bảng điều khiển năng lượng mặt trời, tùy thuộc vào các điều kiện.
Vì pin có thể sạc lại, một diode Schottky thứ ba được kết nối trực tiếp từ bảng năng lượng mặt trời đến ngăn chứa pin để sạc pin từ mặt trời.
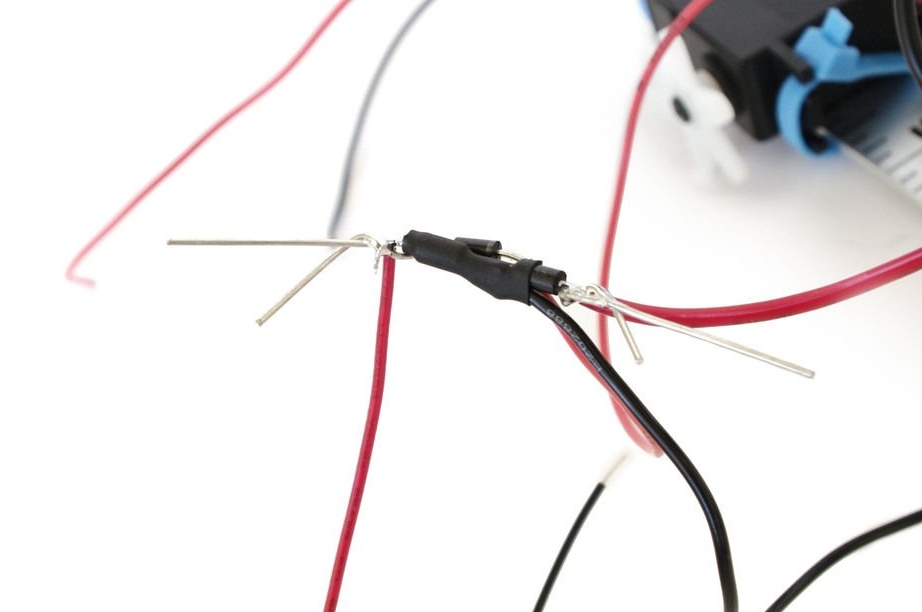
Để kết nối tất cả, kết nối dây màu đỏ từ một trong các động cơ servo và dây màu đen từ điểm kia đến điểm trung tâm của kết nối cực âm.
Tiếp theo, kết nối dây màu đỏ từ cực pin với cực dương của một trong các điốt Schottky. Kết nối dây màu đỏ từ bảng điều khiển năng lượng mặt trời với cực dương trên một diode khác.
Bây giờ hàn cực dương của diode thứ ba với dây màu đỏ được kết nối với bảng năng lượng mặt trời và cực âm với dây màu đỏ từ cực pin.
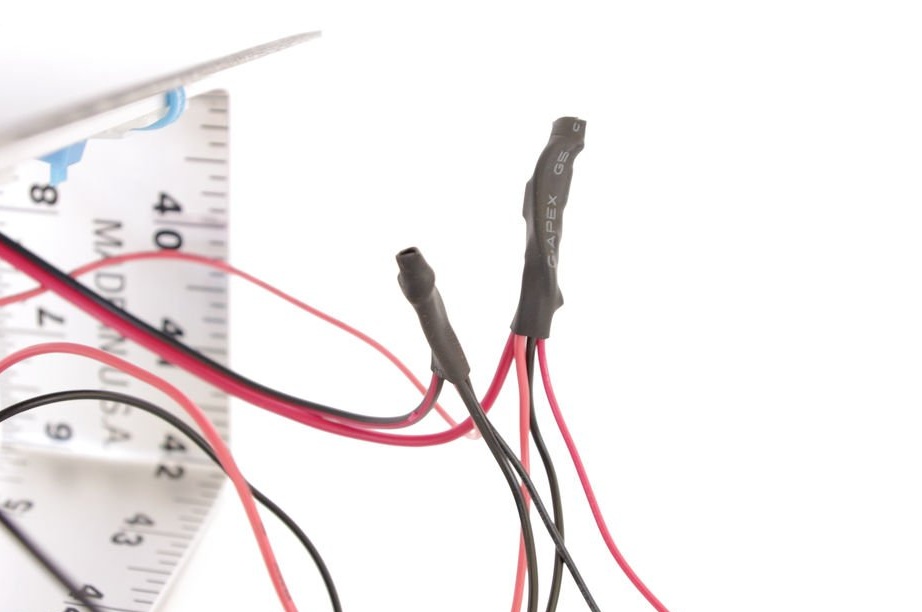
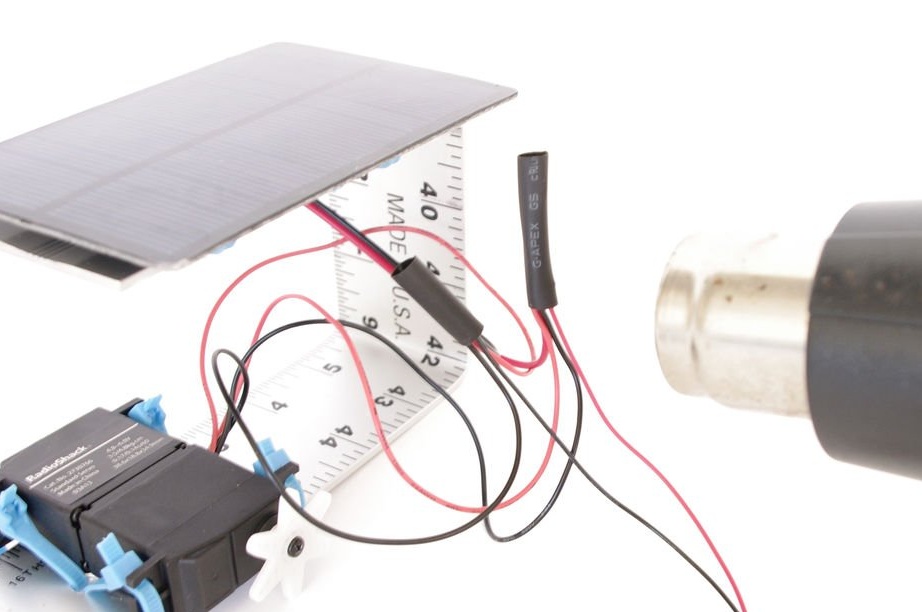
Quấn tất cả các dây với ống co nhiệt để bảo vệ mạch khỏi ngắn mạch.
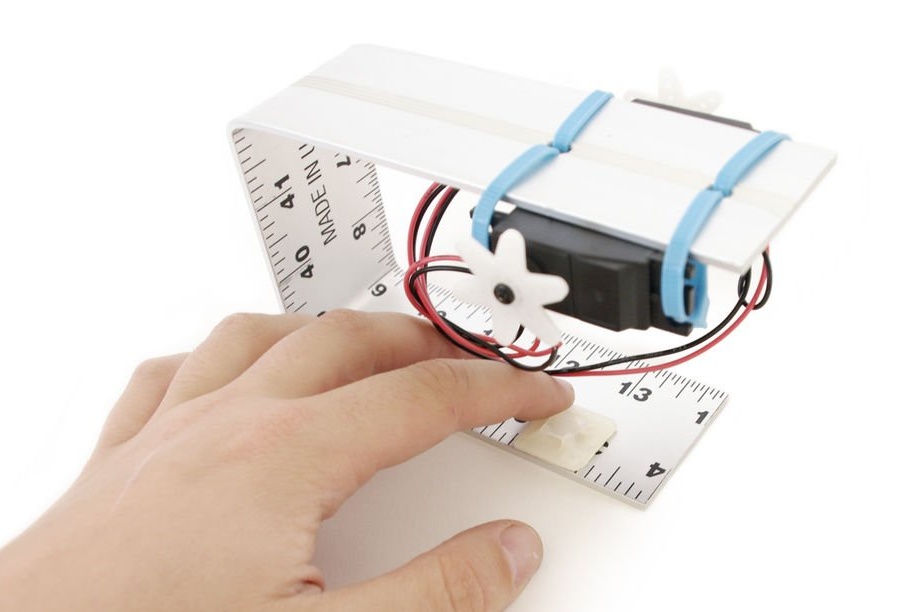
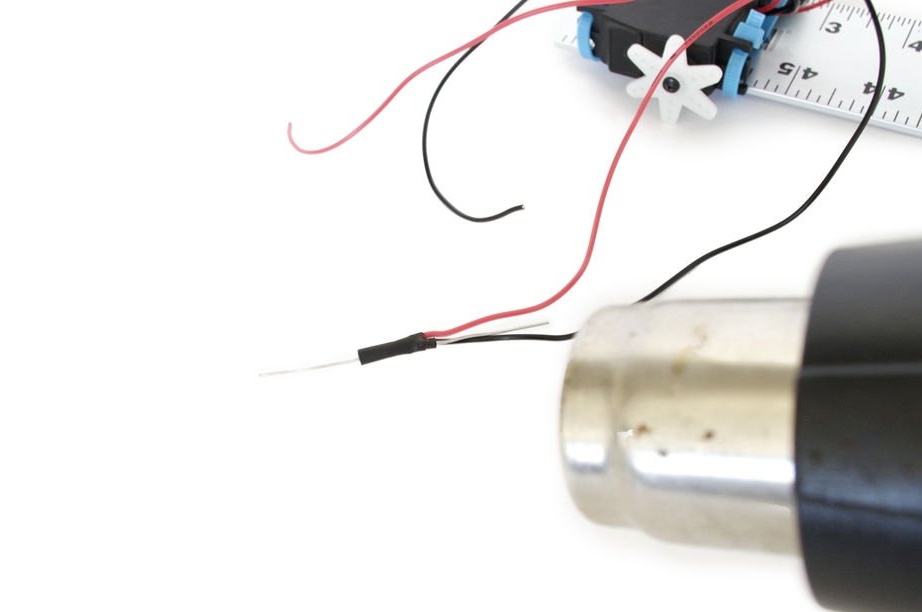
Bước 12: Một số dây khác
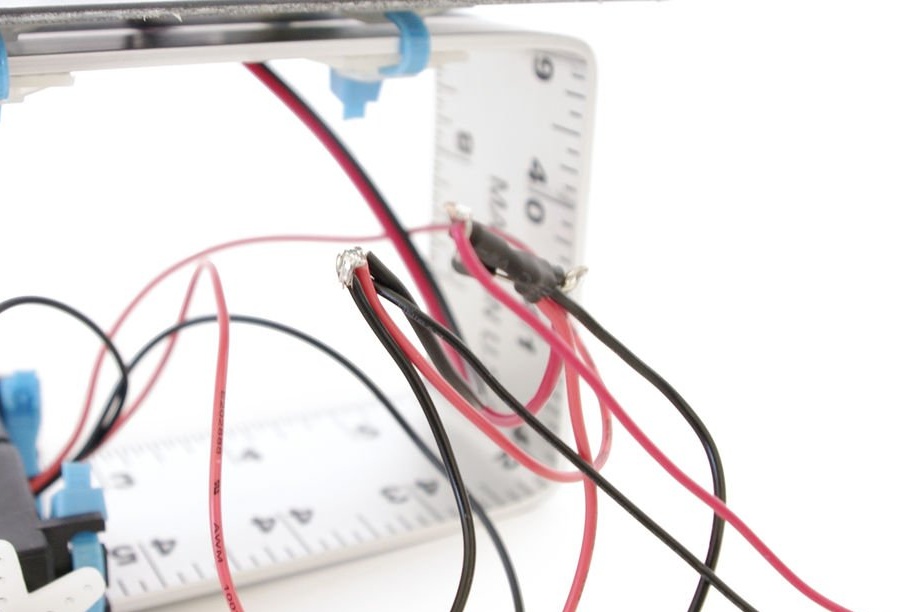
Hàn tất cả các dây màu đen và các dây màu đỏ tự do còn lại từ các servo.
Nhận hai khớp hàn; Một cho sức mạnh, và một cho nền tảng. Bọc cả hai khớp này bằng ống co nhiệt hoặc băng keo điện.
Bước 13: Và một số lý do nữa cho các kẹp
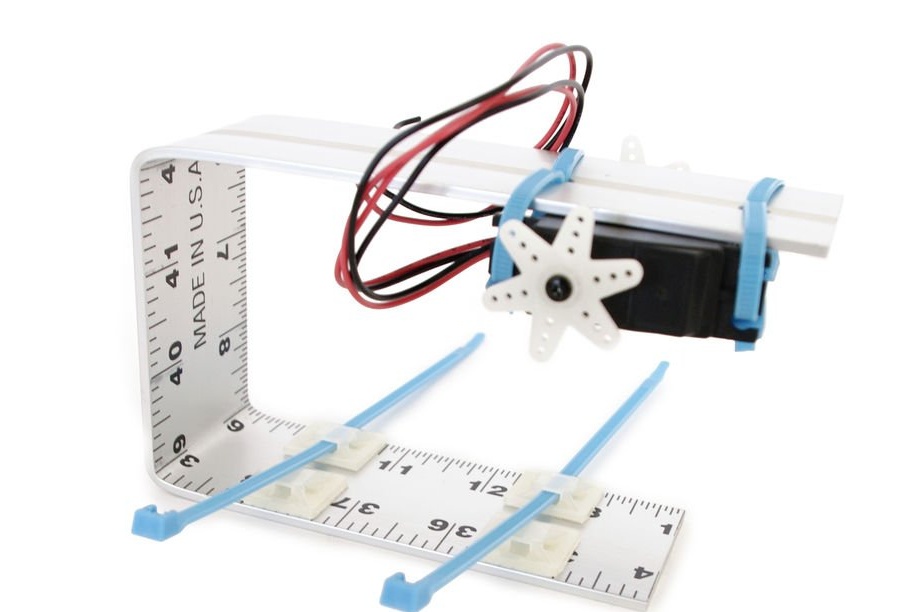
Chốt hai cặp đế vào mặt dưới của thước cong hình chữ U.
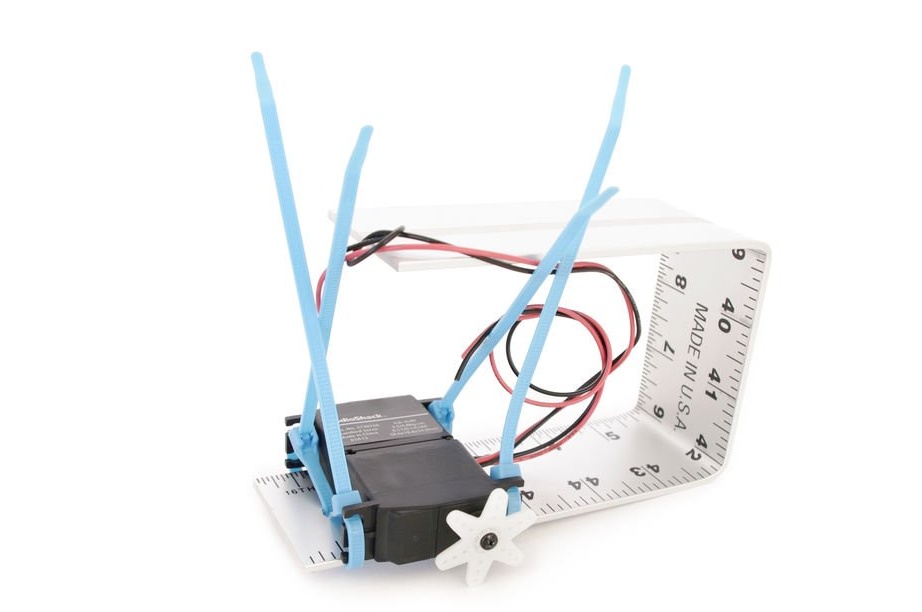
Bước 14: Bảo vệ Pin
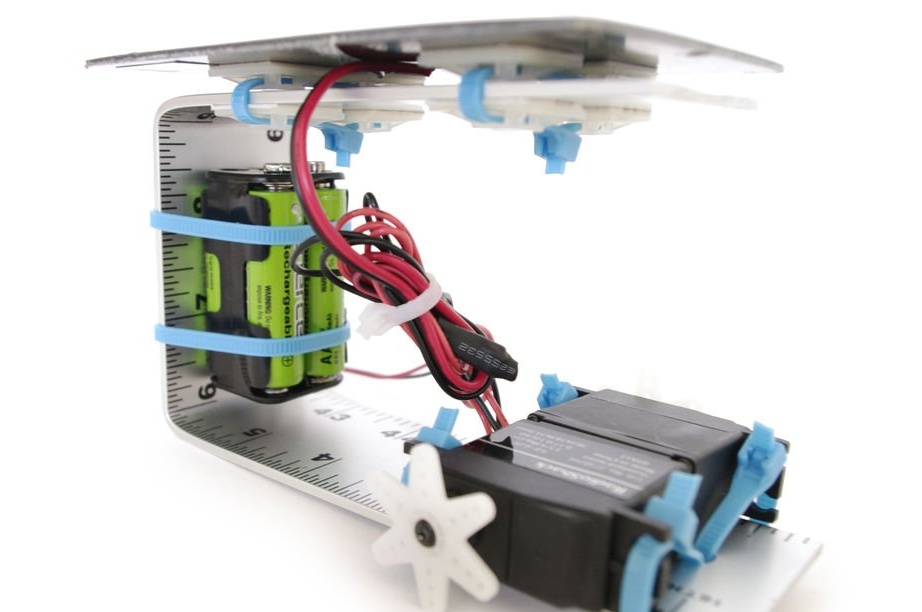
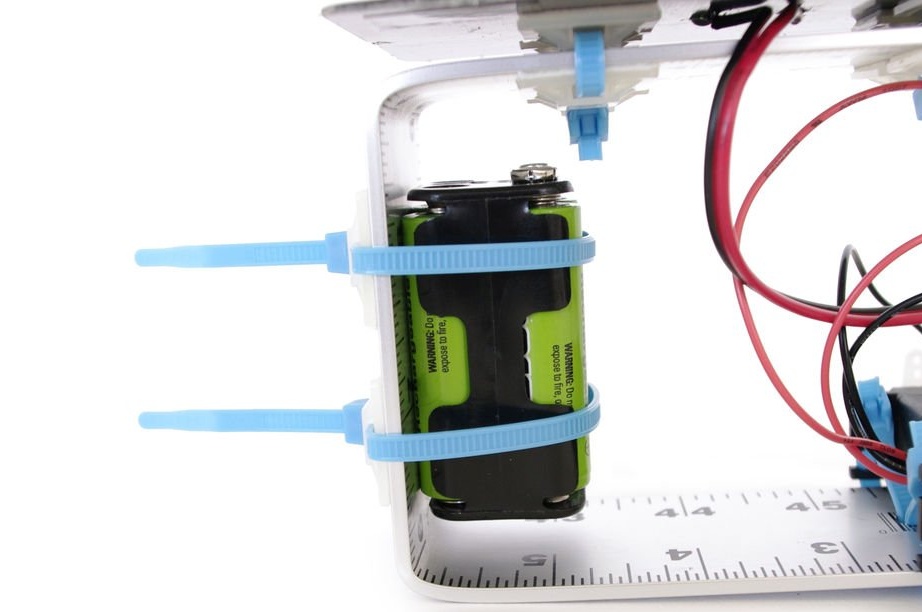
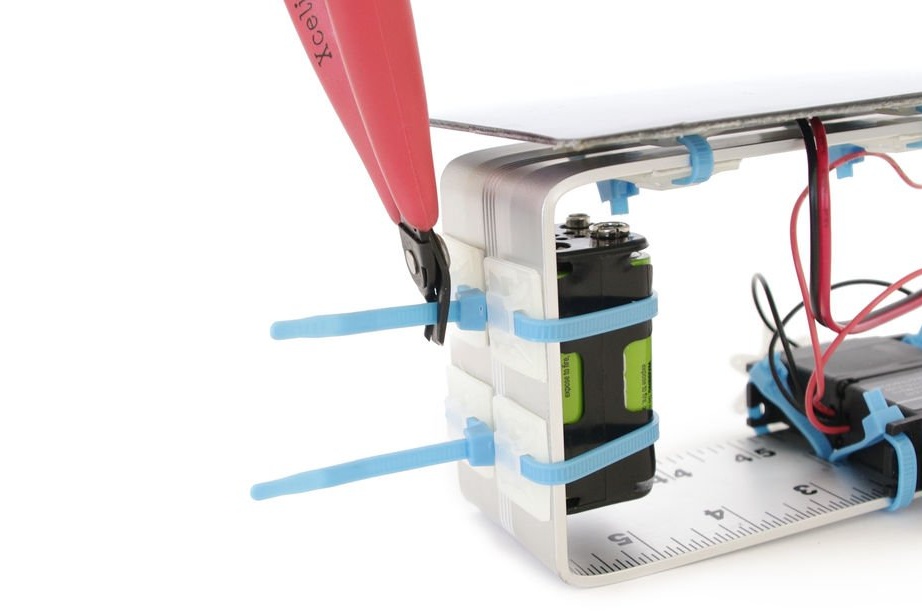
Cố định pin bằng kẹp bên trong thước hình chữ U để chúng ngồi vững và bất động tại chỗ.
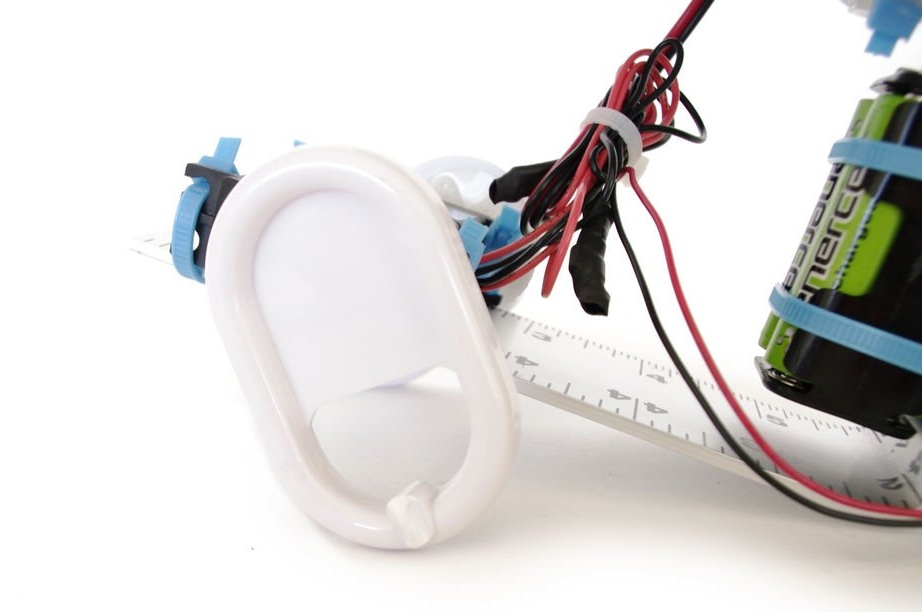
Bước 15: Cắt tỉa


Cắt móc trên giá treo tường bằng nhựa.
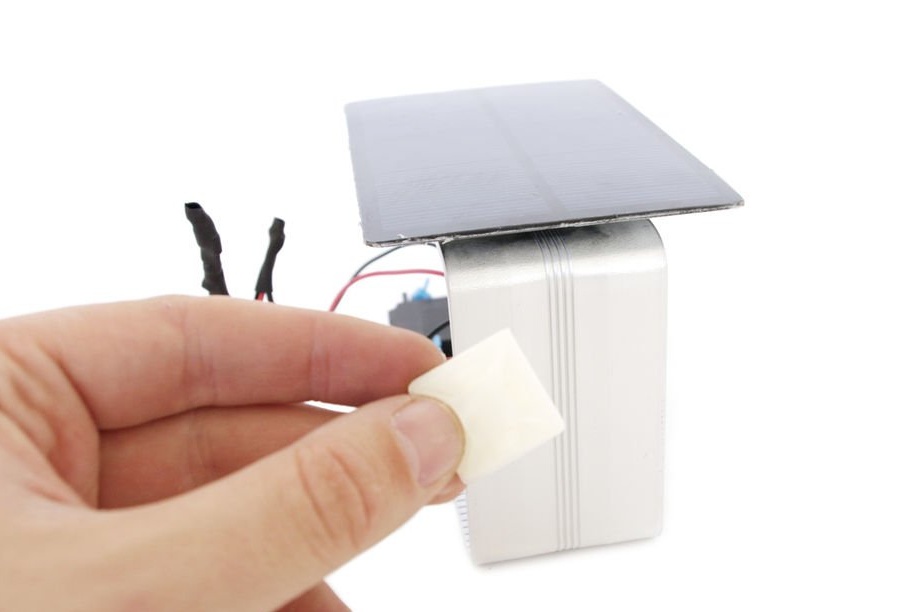
Bước 16: Bánh xe
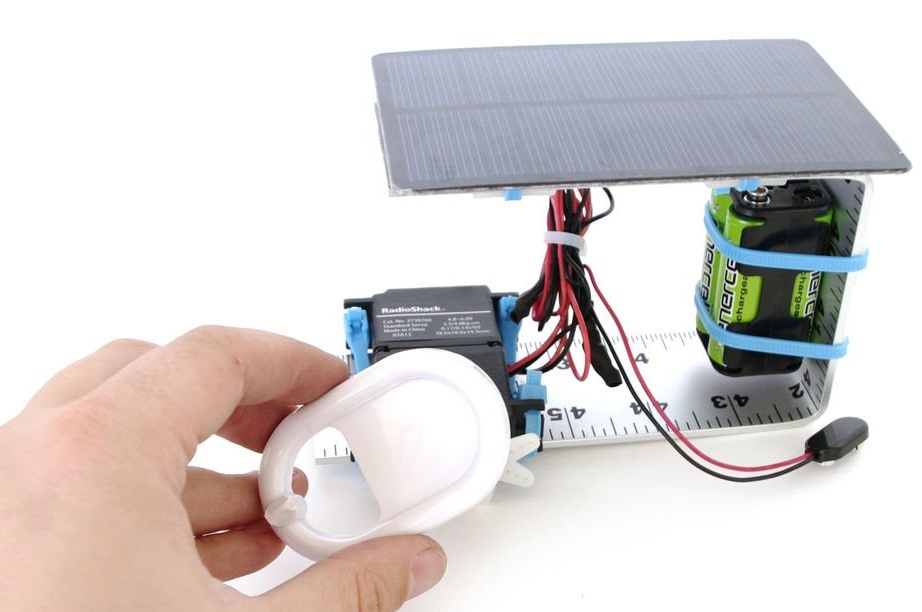
Dán keo gắn tường vào bánh răng bên ngoài của động cơ servo (đây sẽ là một cái gì đó giống như bánh xe).
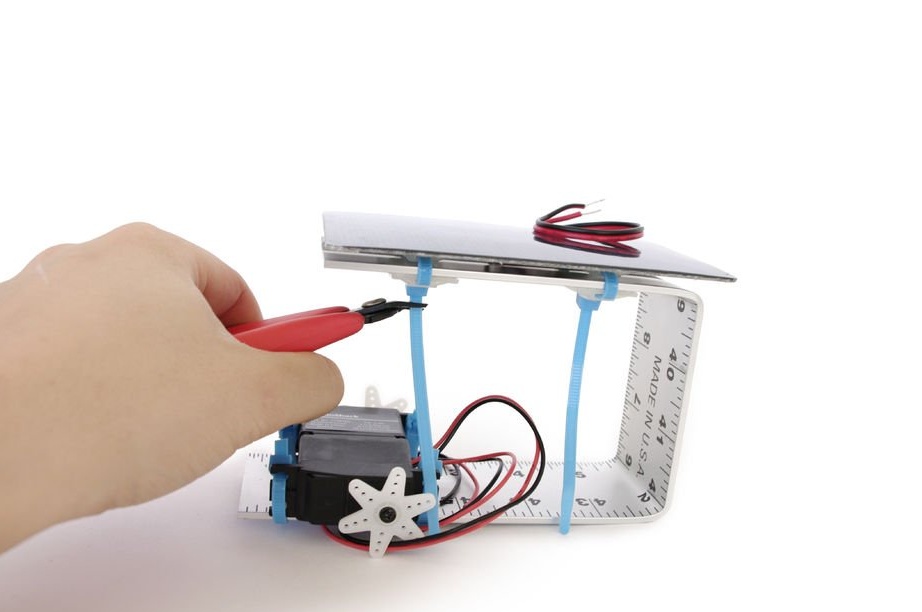
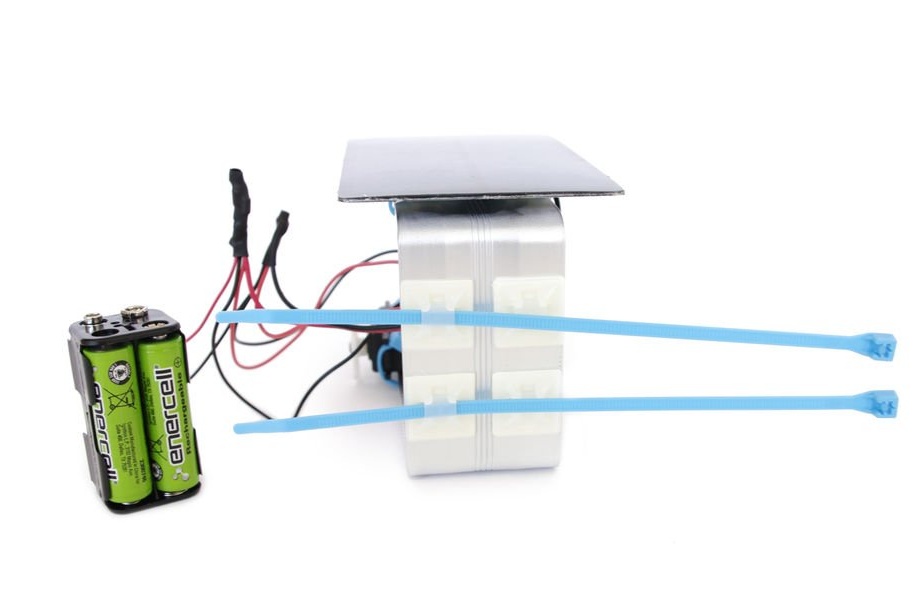
Bước 17: Bật!

Kết nối dây dẫn với bộ pin và robot sẽ bắt đầu di chuyển.