
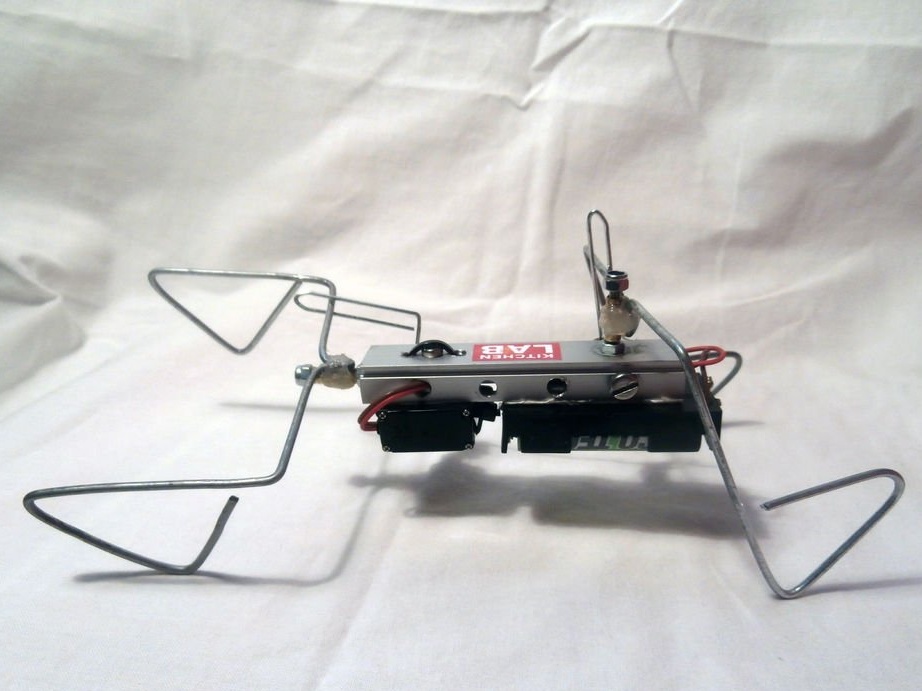
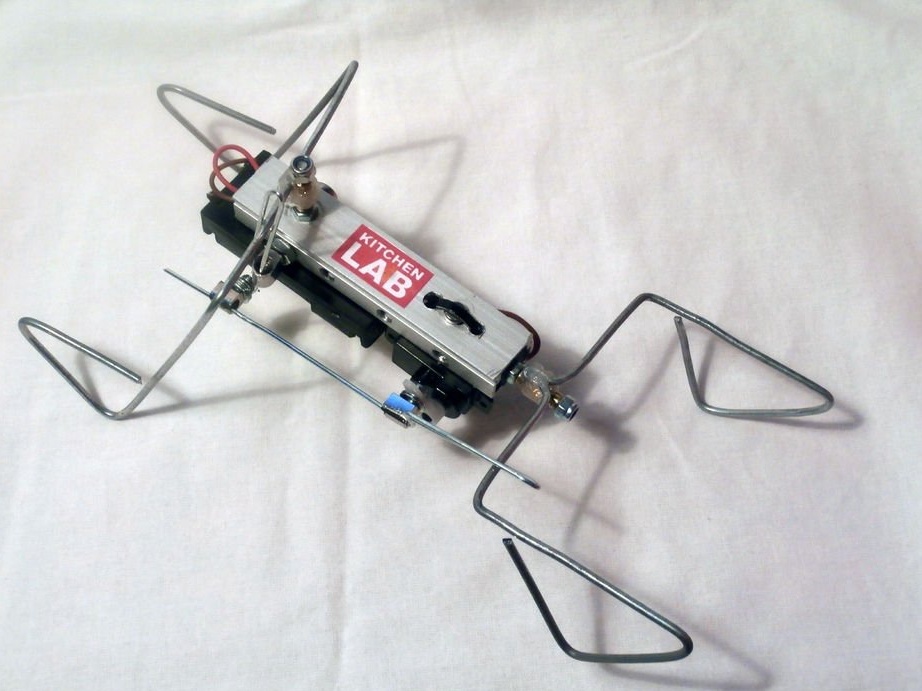
Xin chào mọi người! Tôi đã được truyền cảm hứng để tạo ra robot BEAM của mình, khi đã thấy đủ các kỳ quan động cơ đơn và động cơ đôi này trên Internet. Ý tưởng là tạo ra một robot đi bộ, đi bộ giống như những người đi bộ BEAM 2 hoặc 2 động cơ. Sau nhiều thử nghiệm không thành công, tôi đã làm những gì tôi muốn!
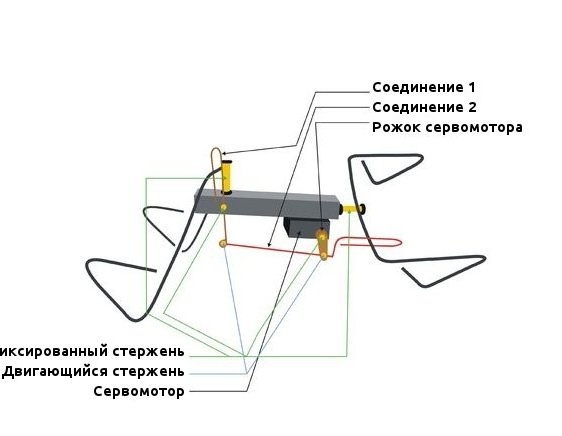
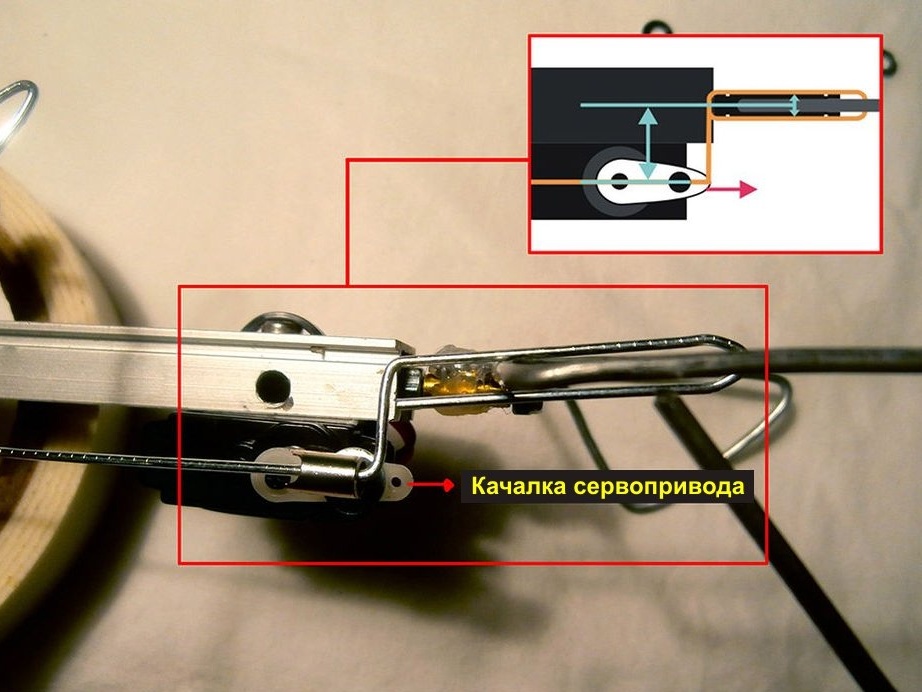
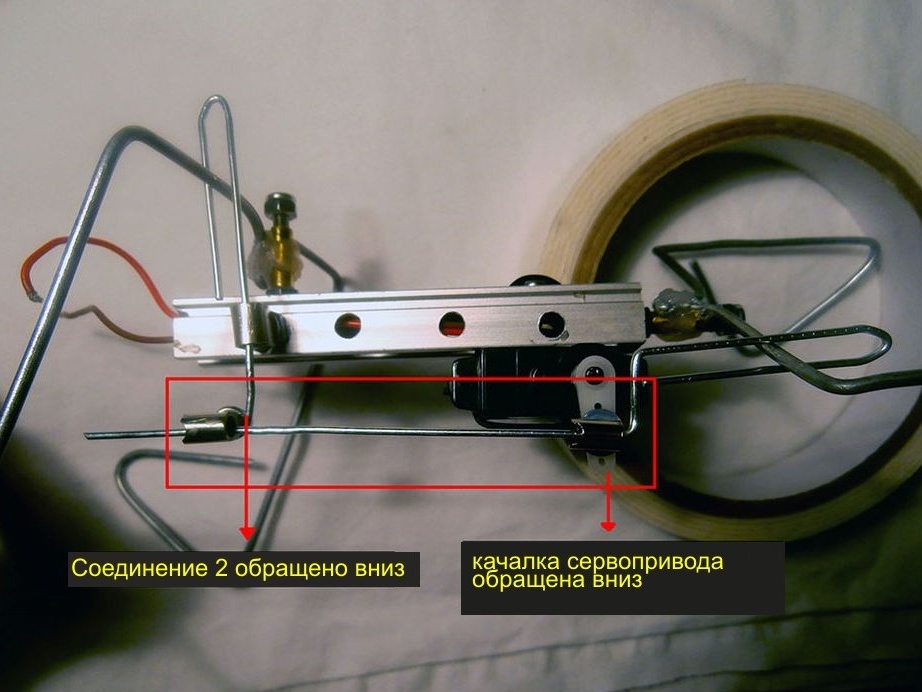
Bước 1: Cơ chế
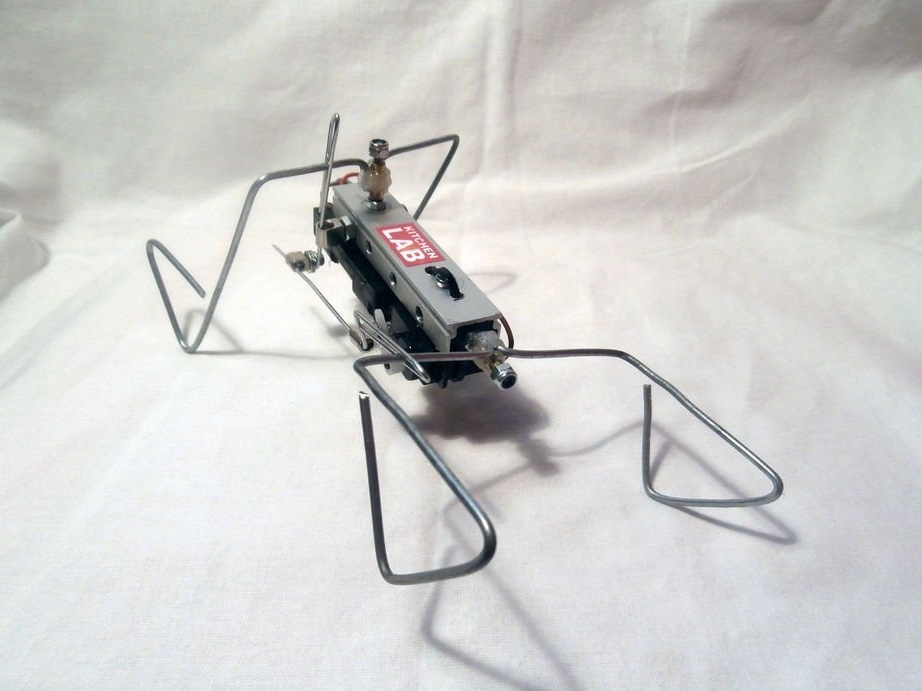
Bước 2: Bộ phận cần thiết

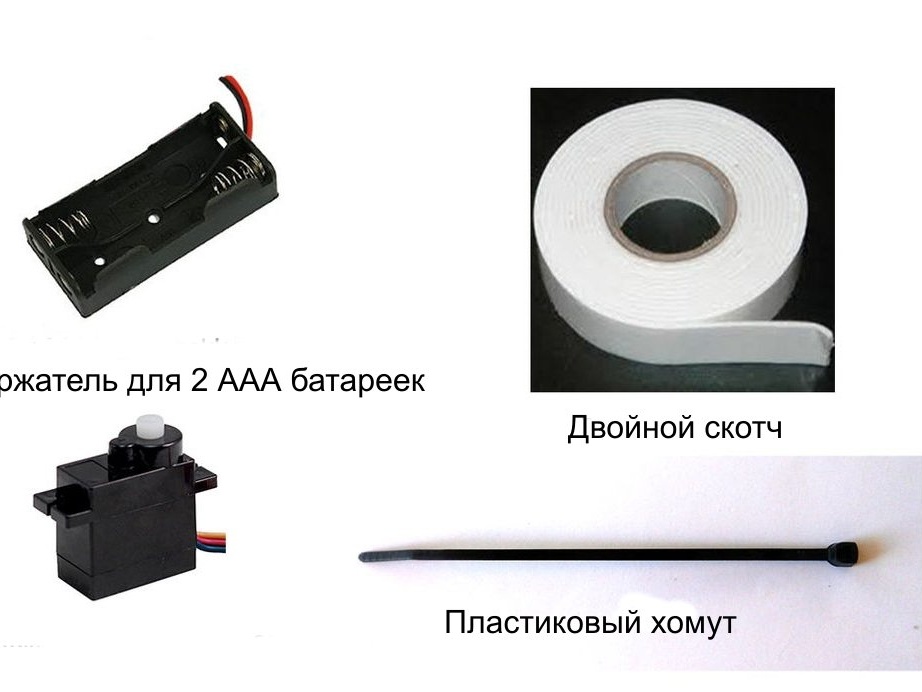



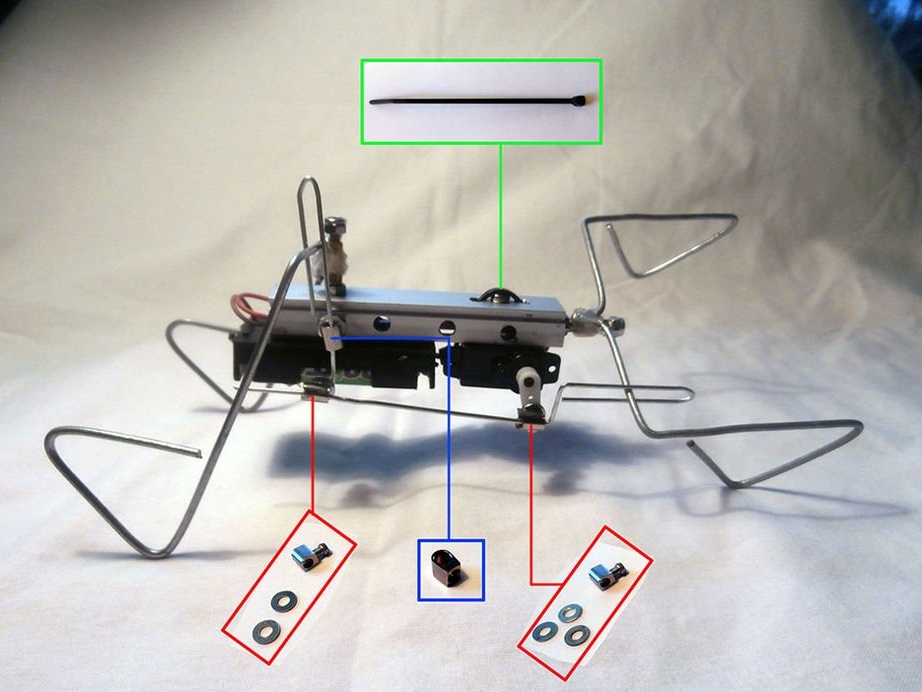
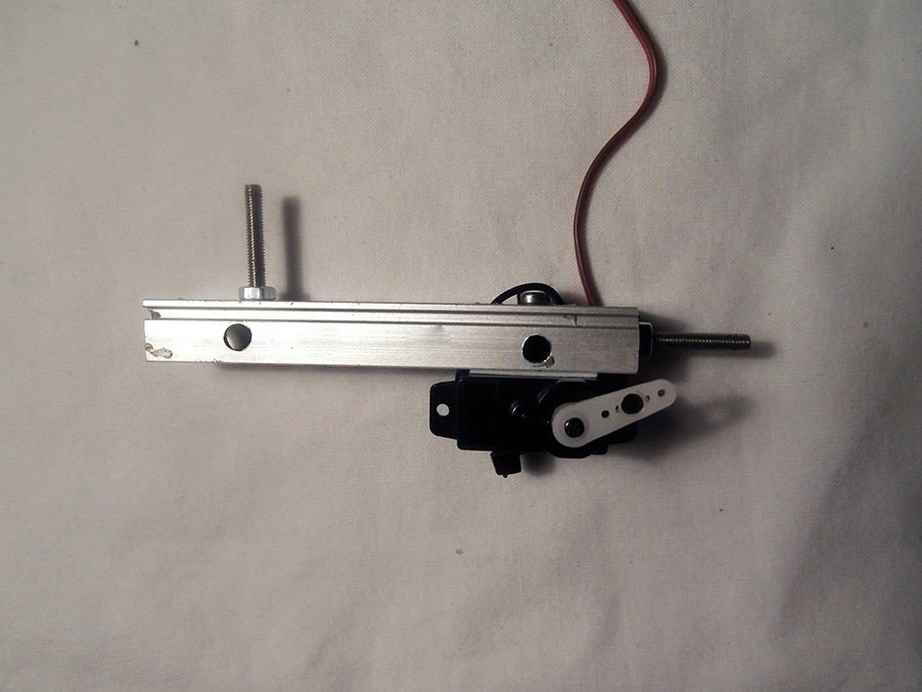
(1x) servo xoay liên tục
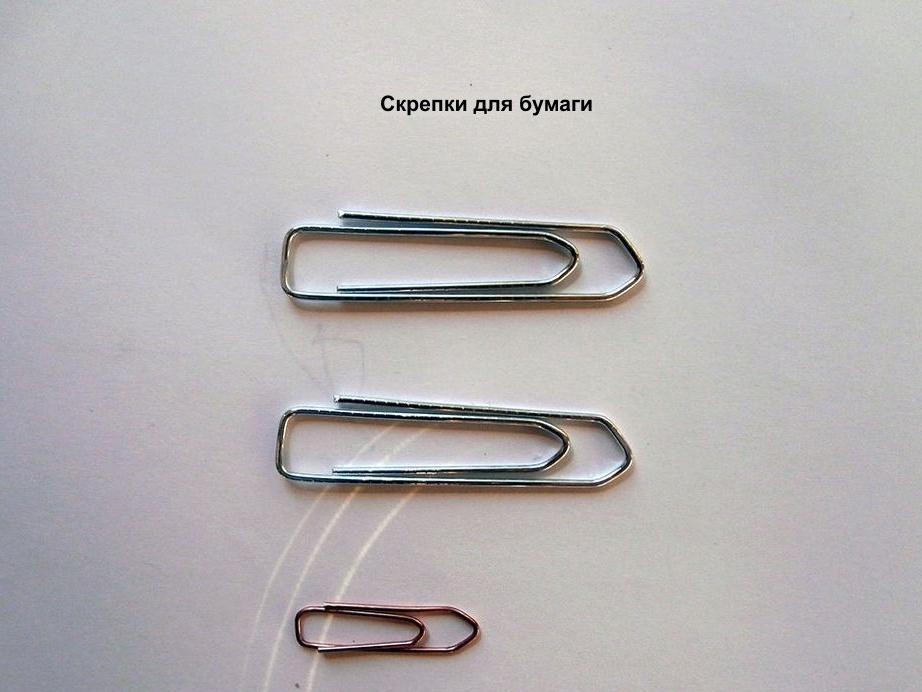
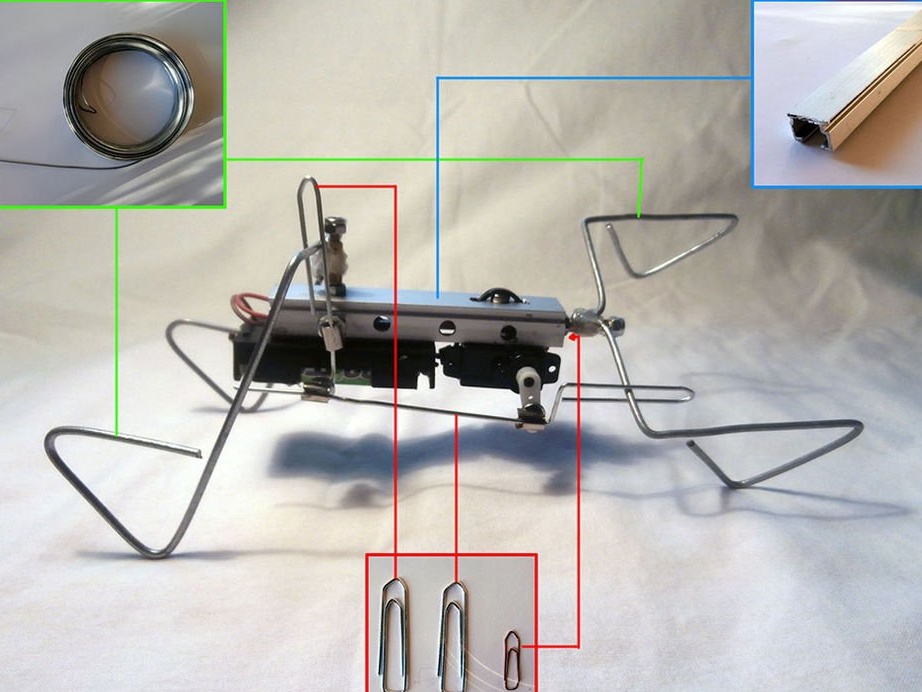
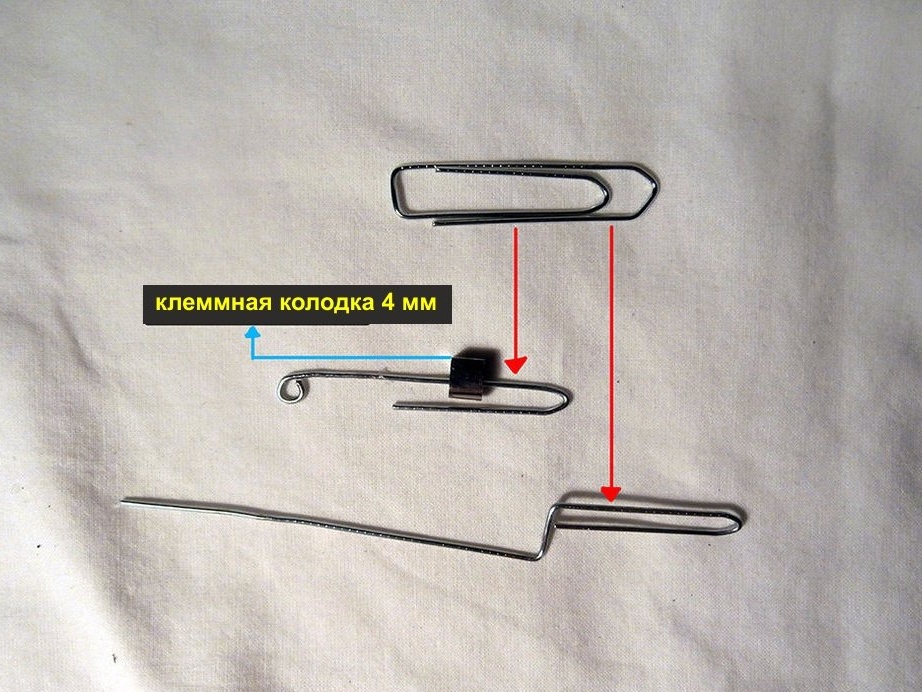
(2x) kẹp giấy lớn
(1x) kẹp giấy nhỏ
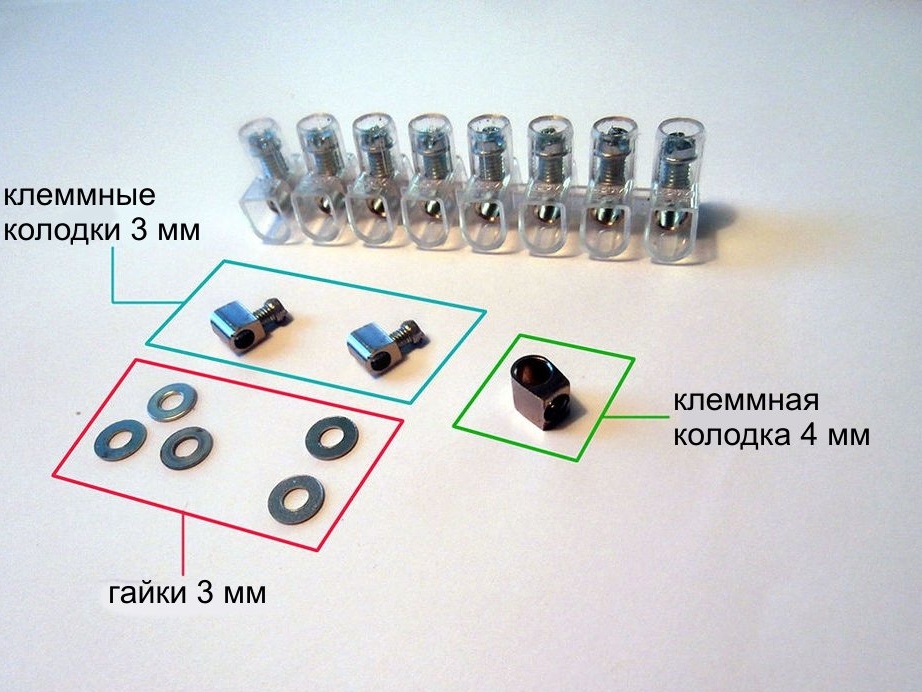
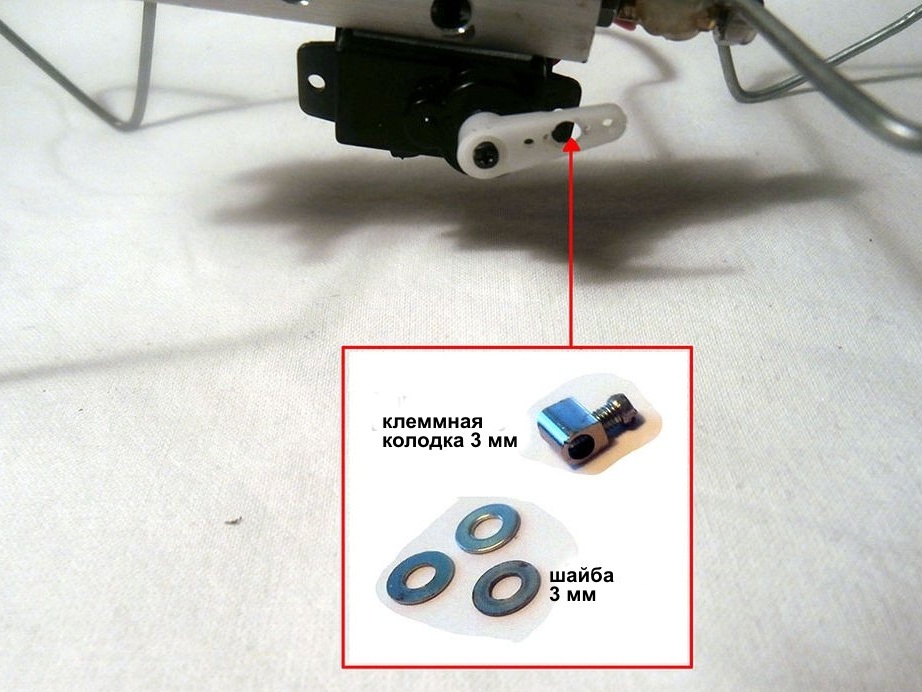
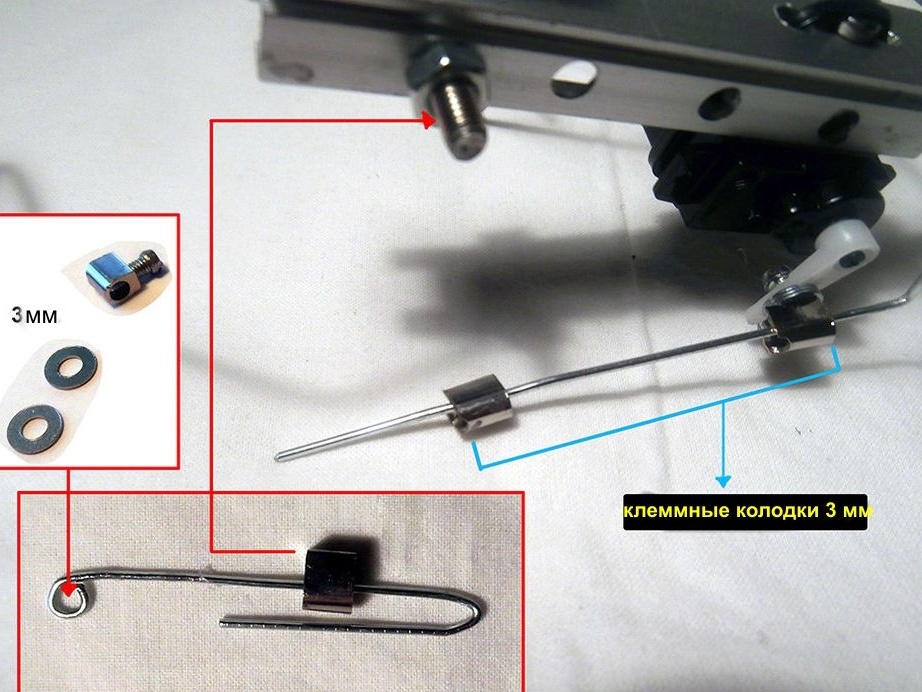
(2x) khối đầu cuối (3 mm)
(1x) khối đầu cuối (4mm)
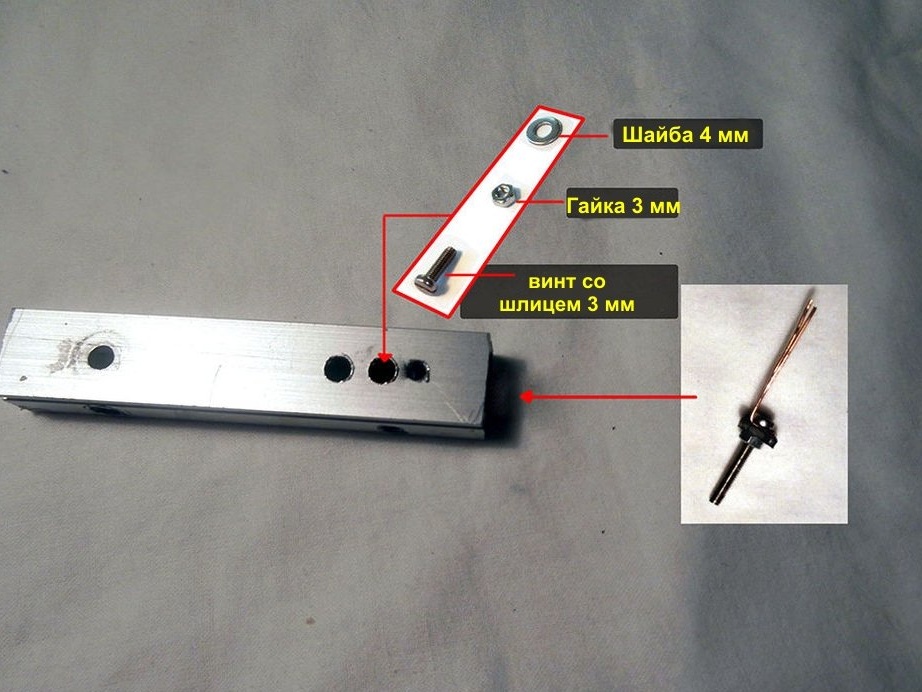
(1X) Khối hồ sơ nhôm đã qua sử dụng
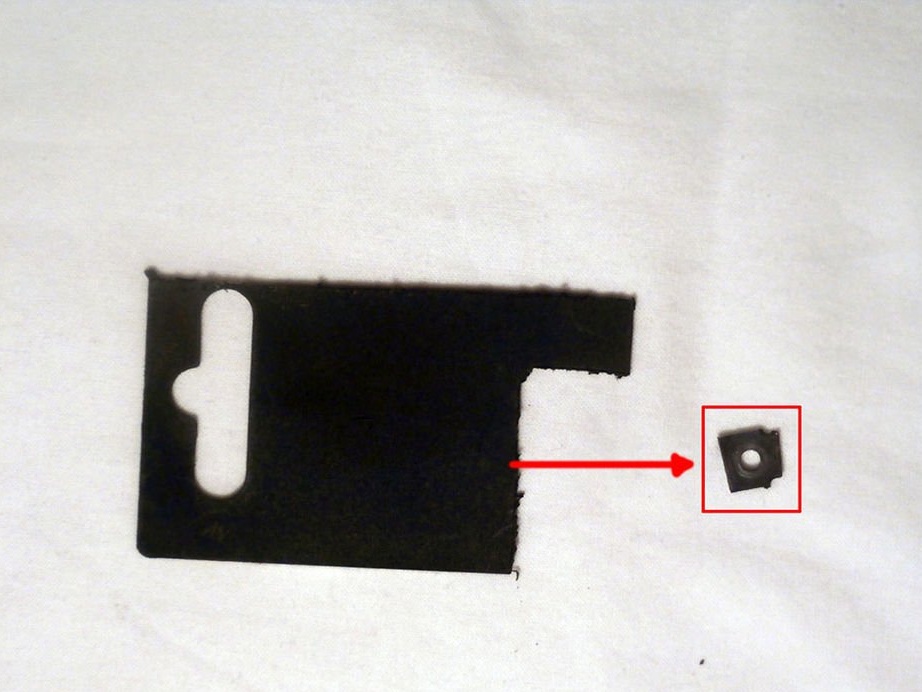
(1X) miếng nhựa
Dây thép (2 mm)
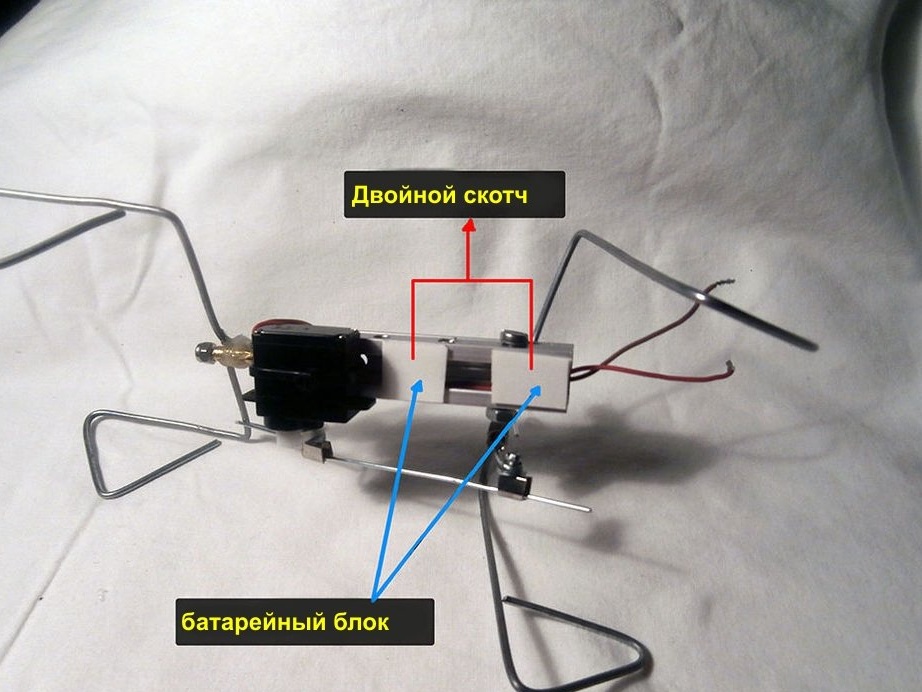
Băng dính đôi
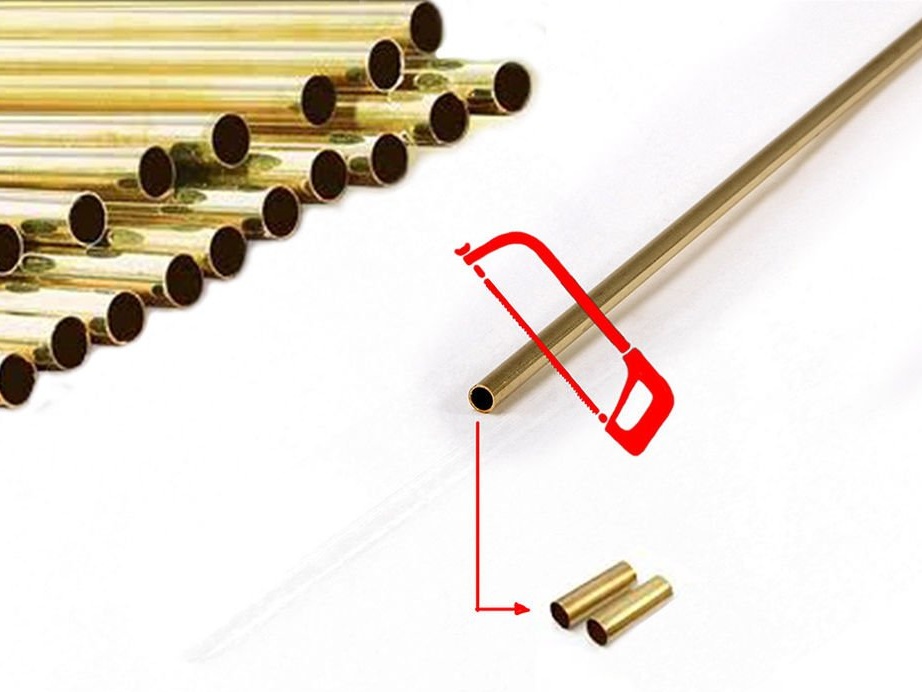
Ống đồng
(1X) kẹp nhỏ
(1X) gói pin (2 x AAA)
(2X) móc khóa (3 mm)
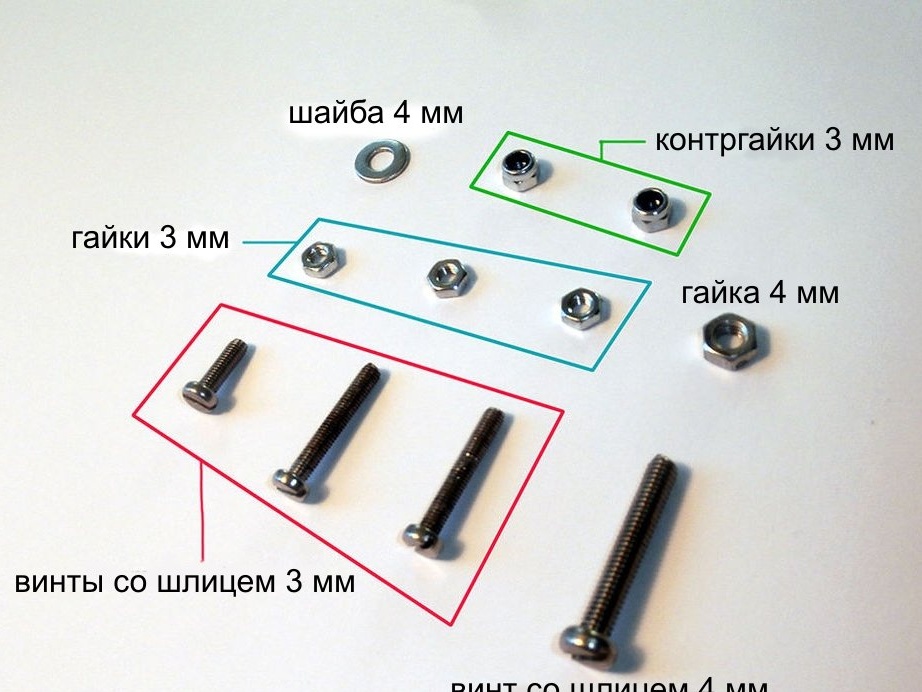
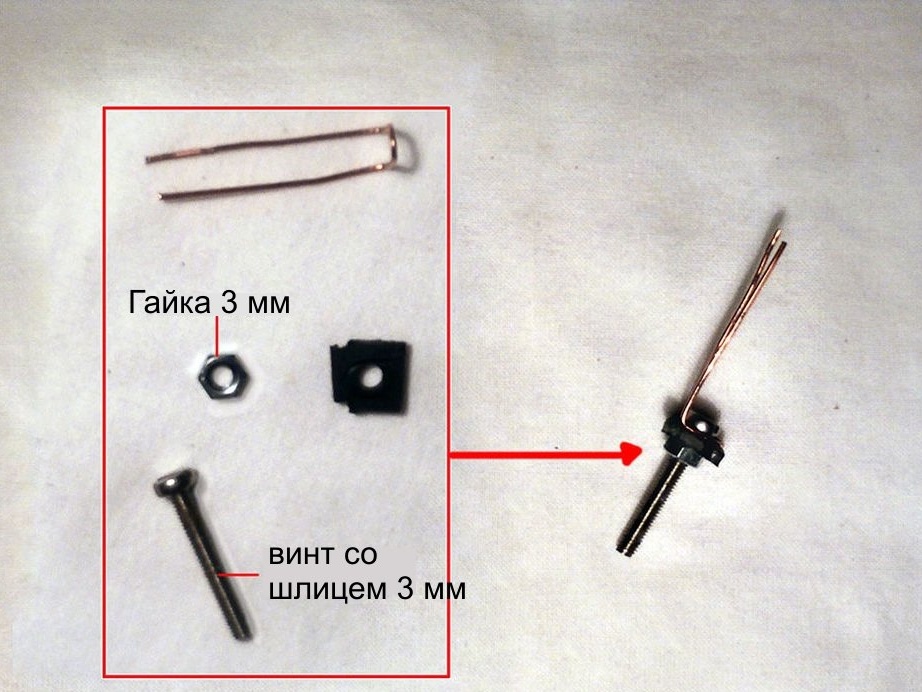
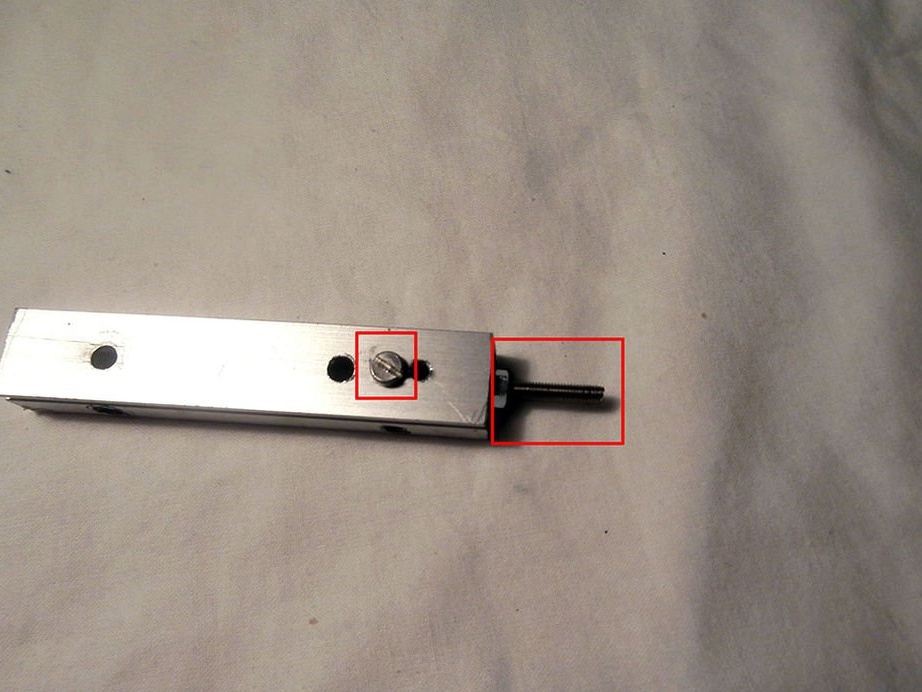
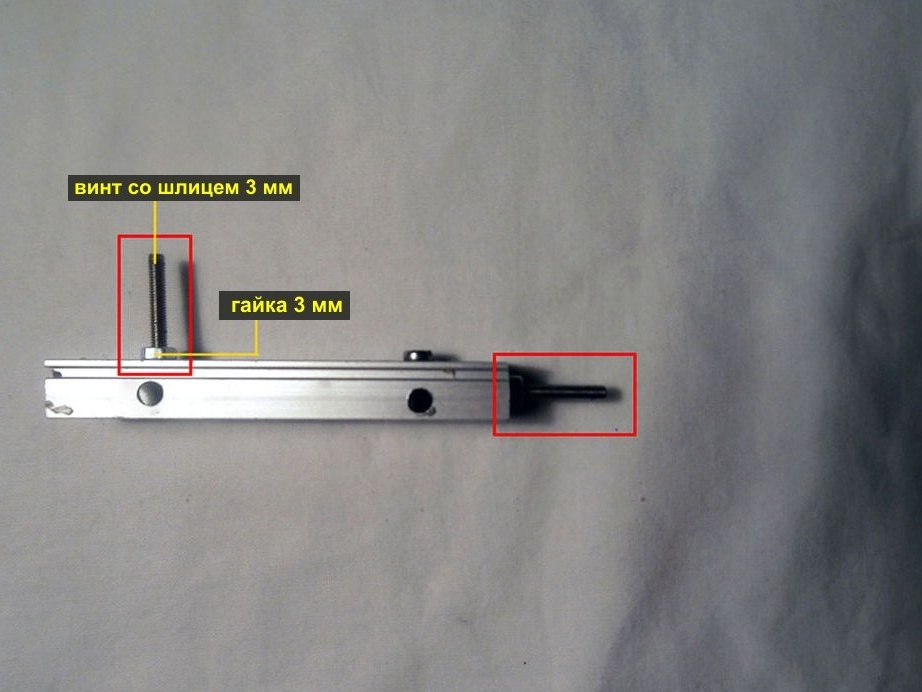
(3X) đai ốc và ốc vít (3 mm)
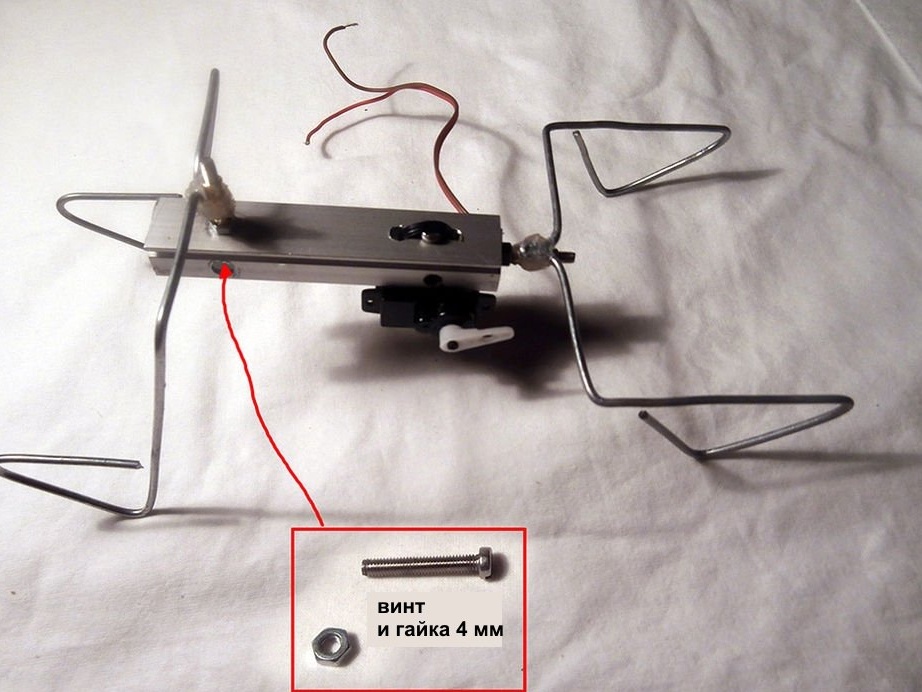
(1x) đai ốc và ốc vít (4 mm)
(5x) máy giặt (3 mm)
(1X) máy giặt (4mm)
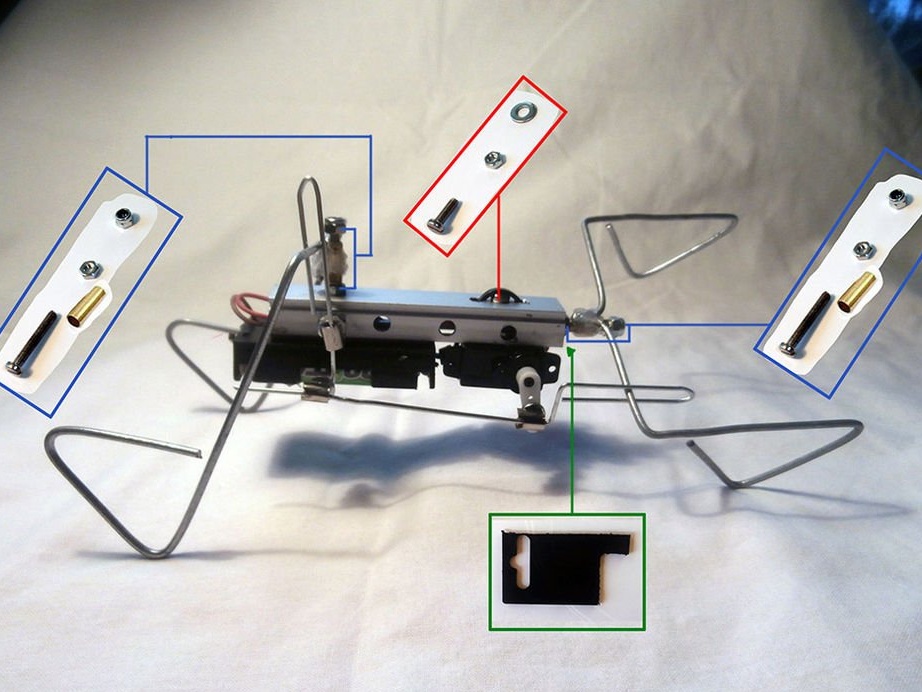
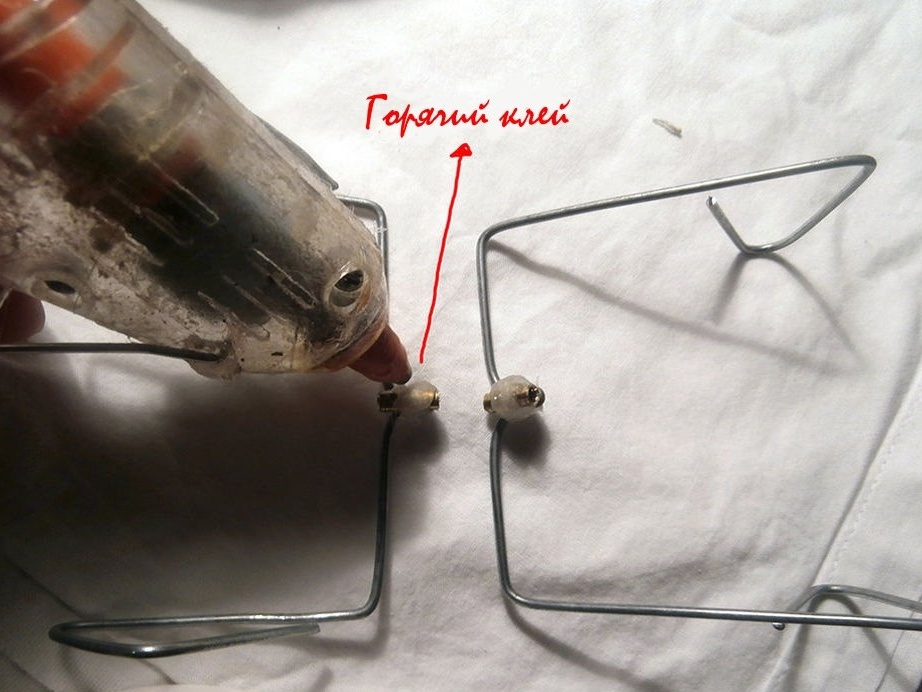
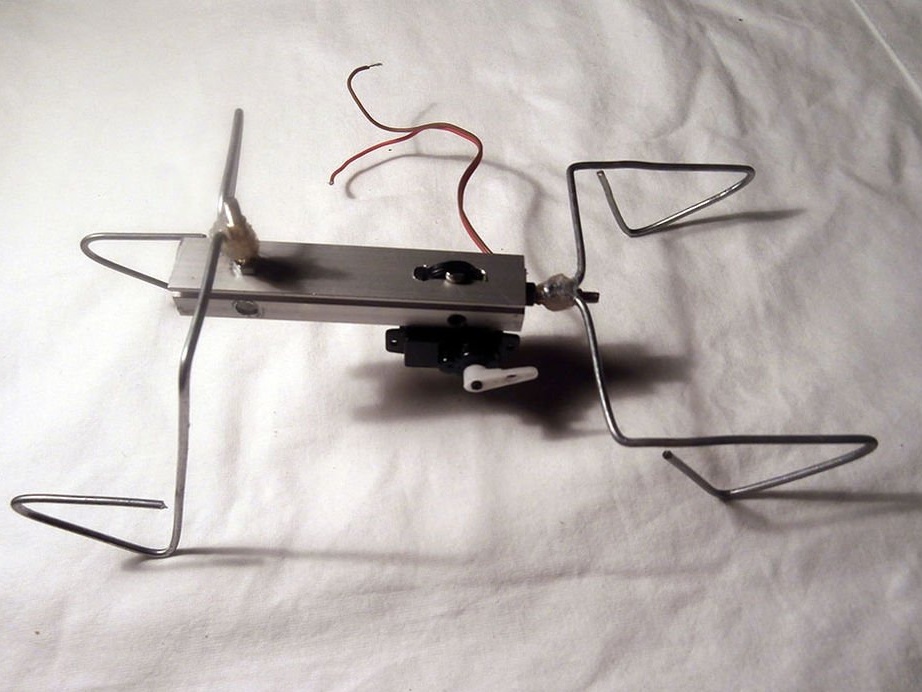
Bước 3: Lắp ráp các bộ phận
Bước 4: Công cụ
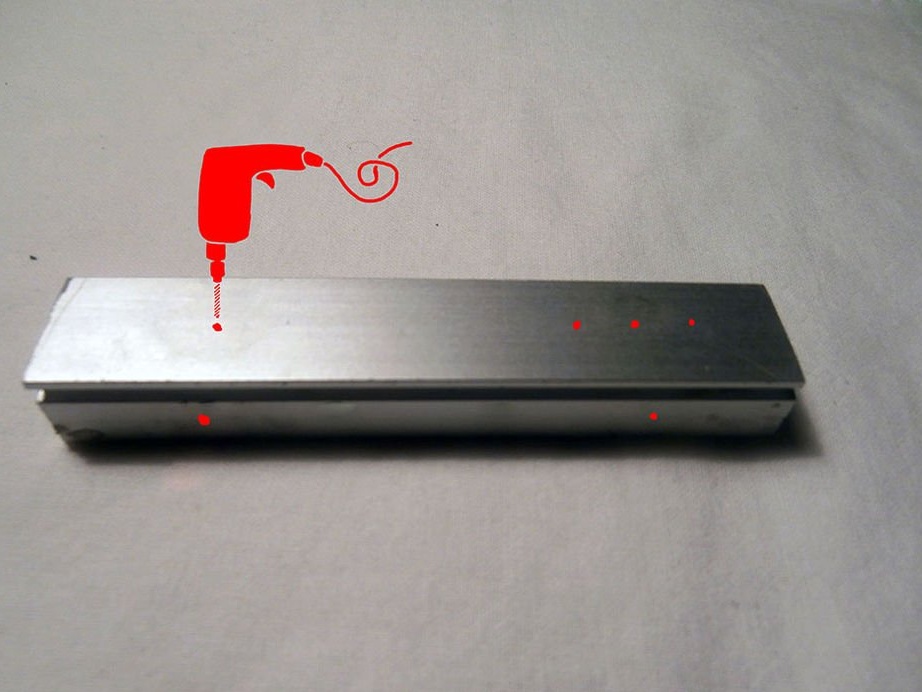
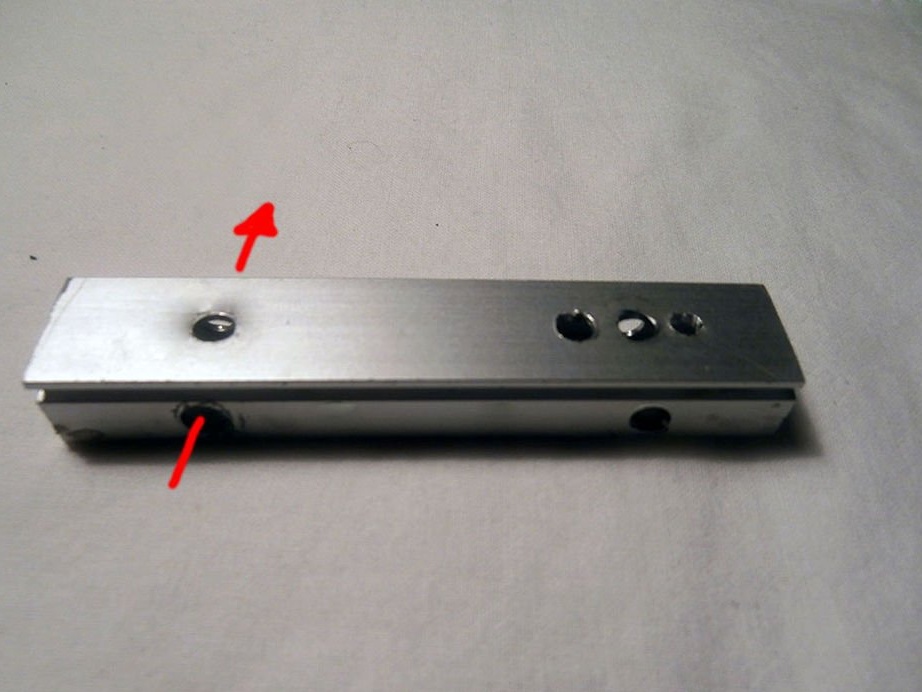
Bước 5: Nhà ở

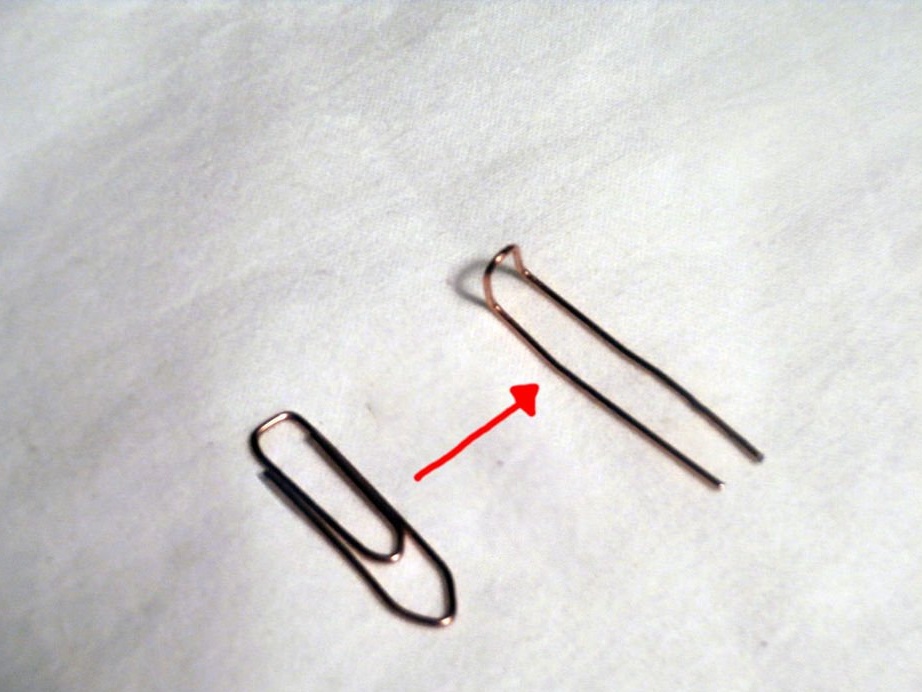

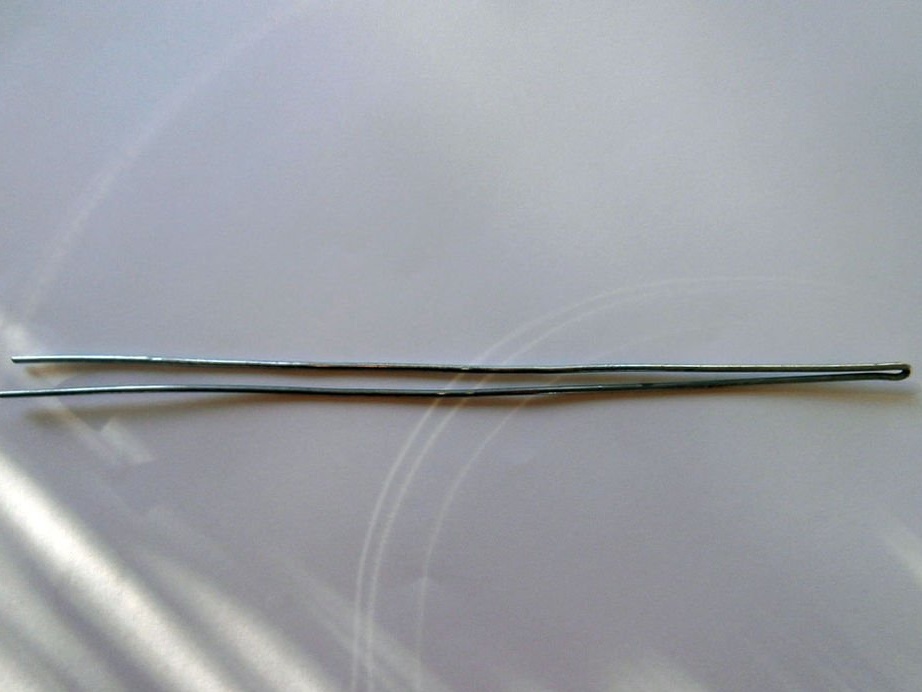
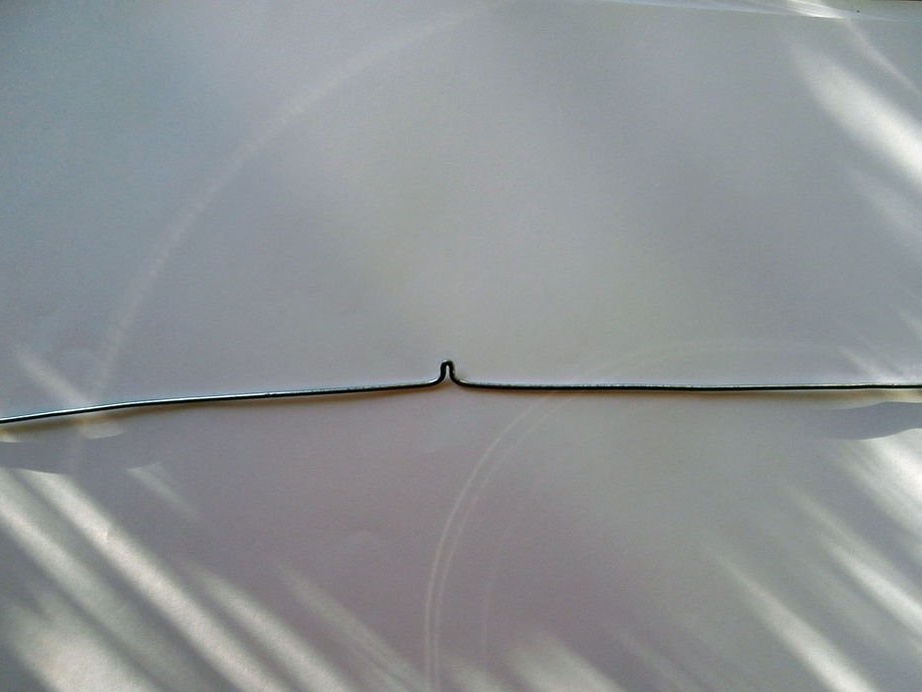
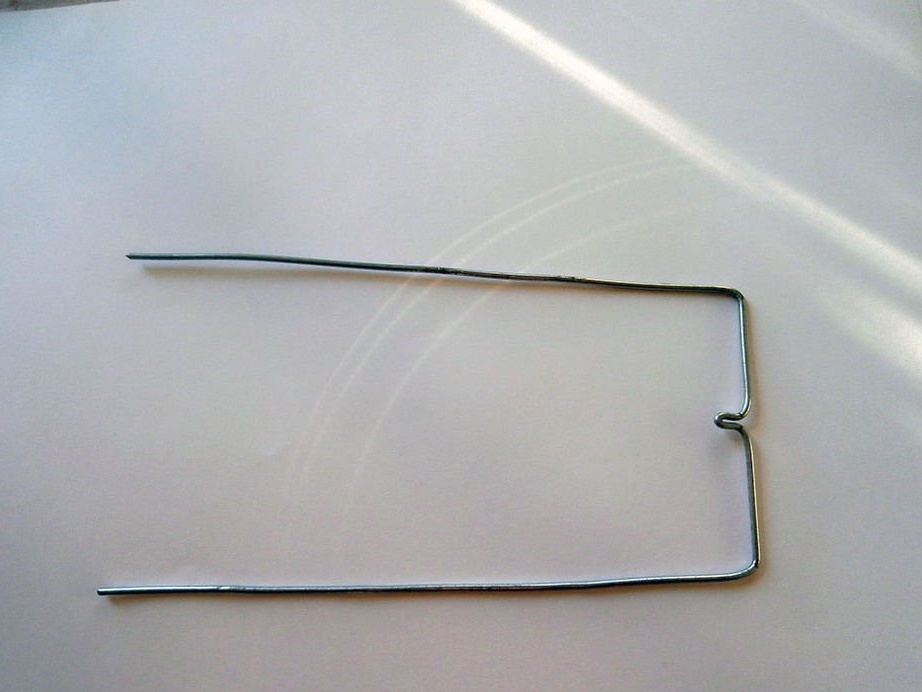
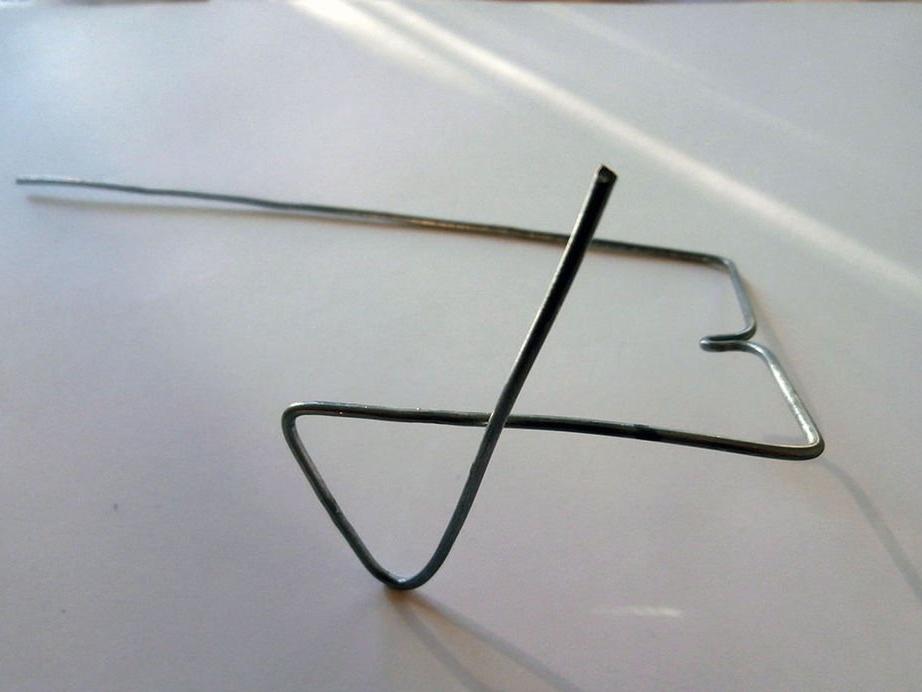
Bước 6: chân trước
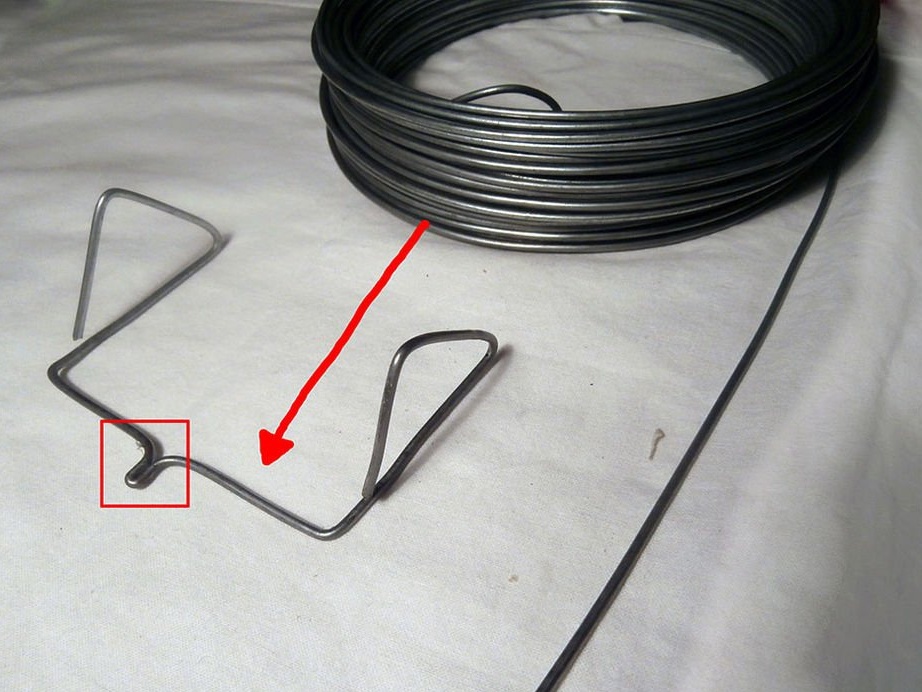
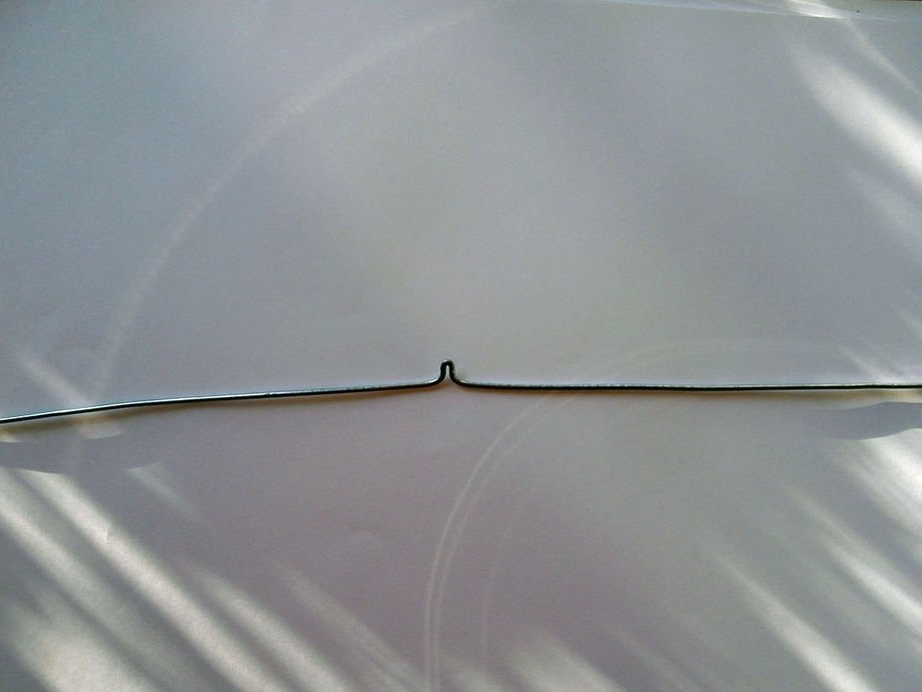
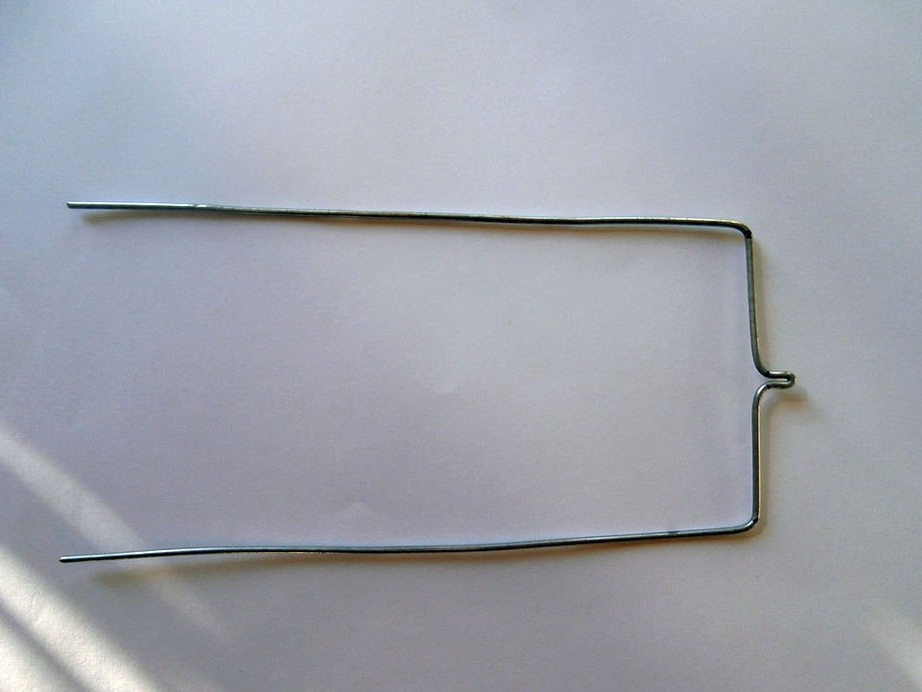
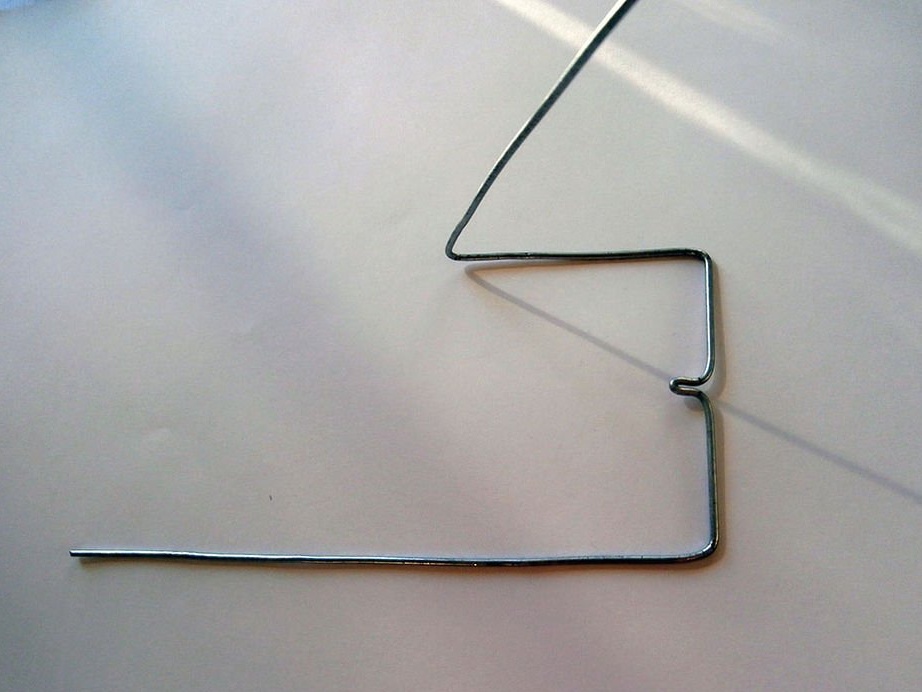
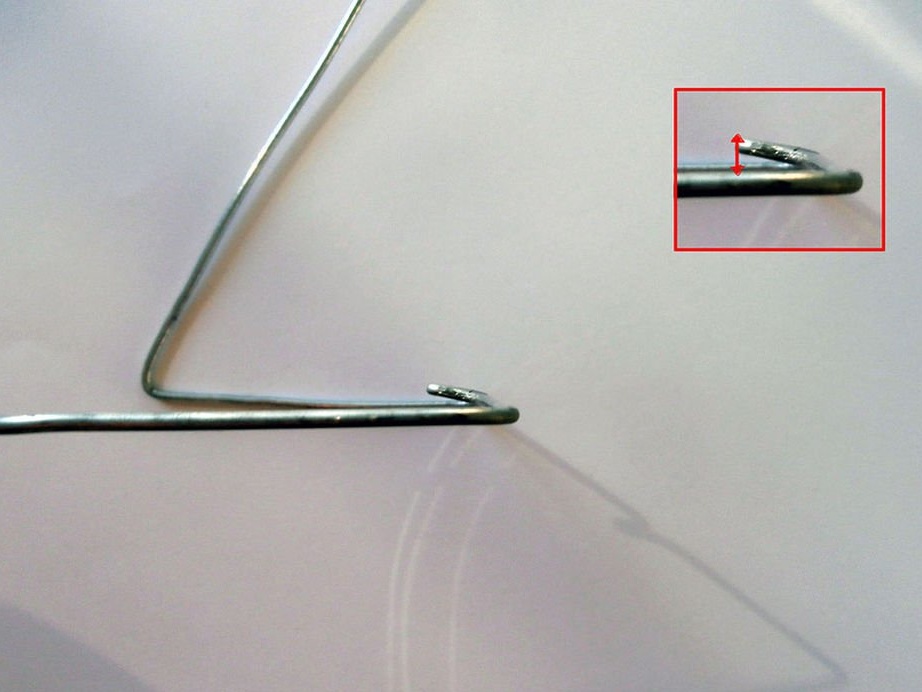
Bước 7: Chân sau
Bước 8: Gắn chân
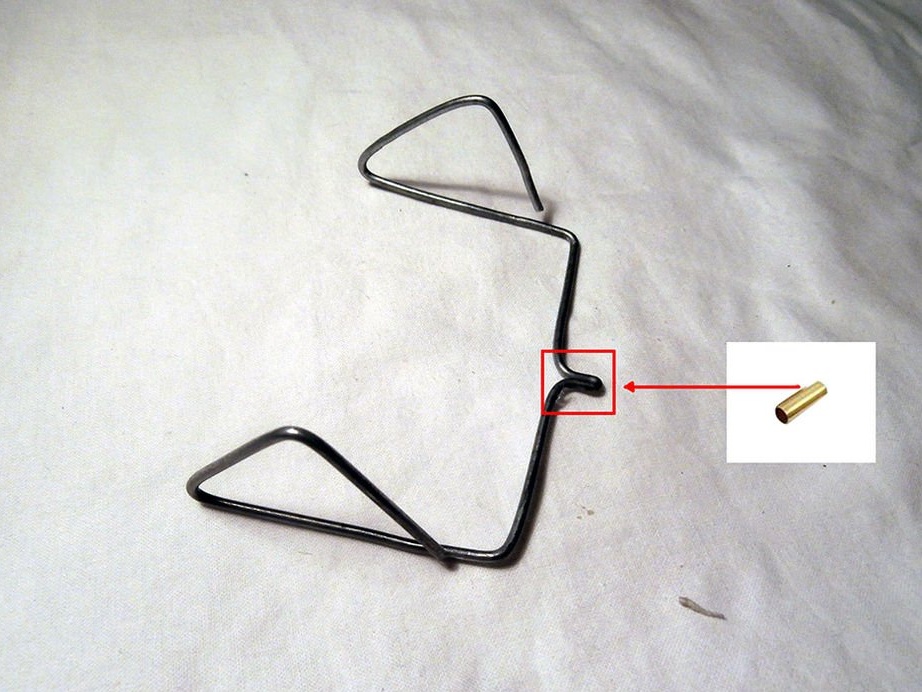
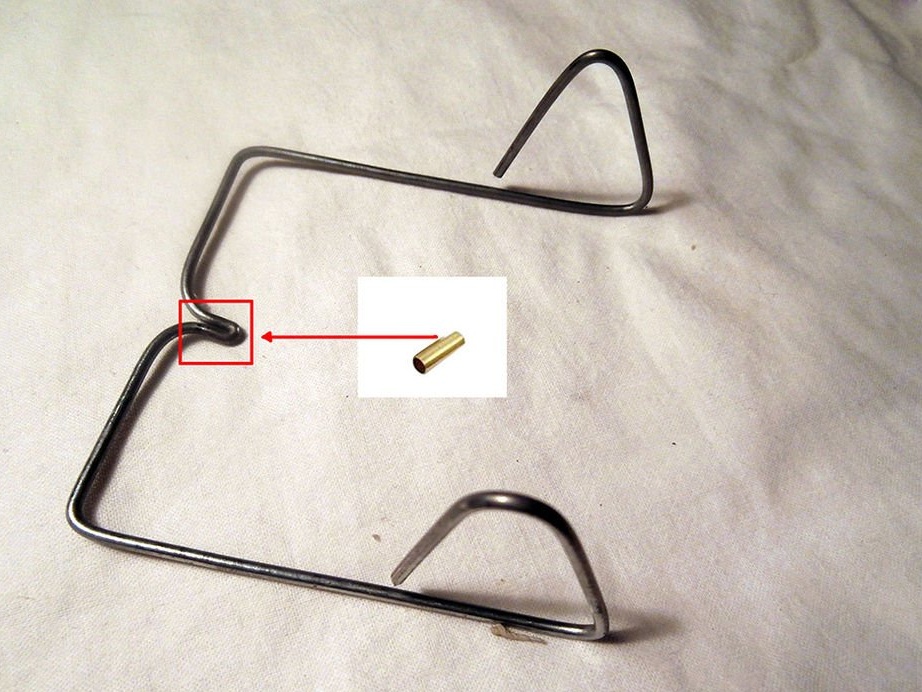
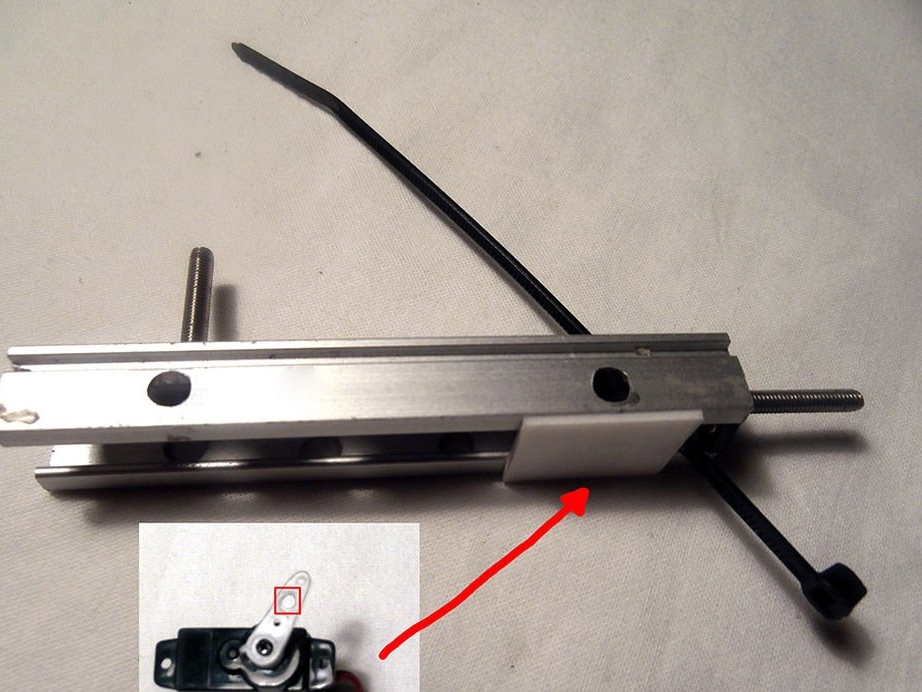
Bước 9: Ly hợp
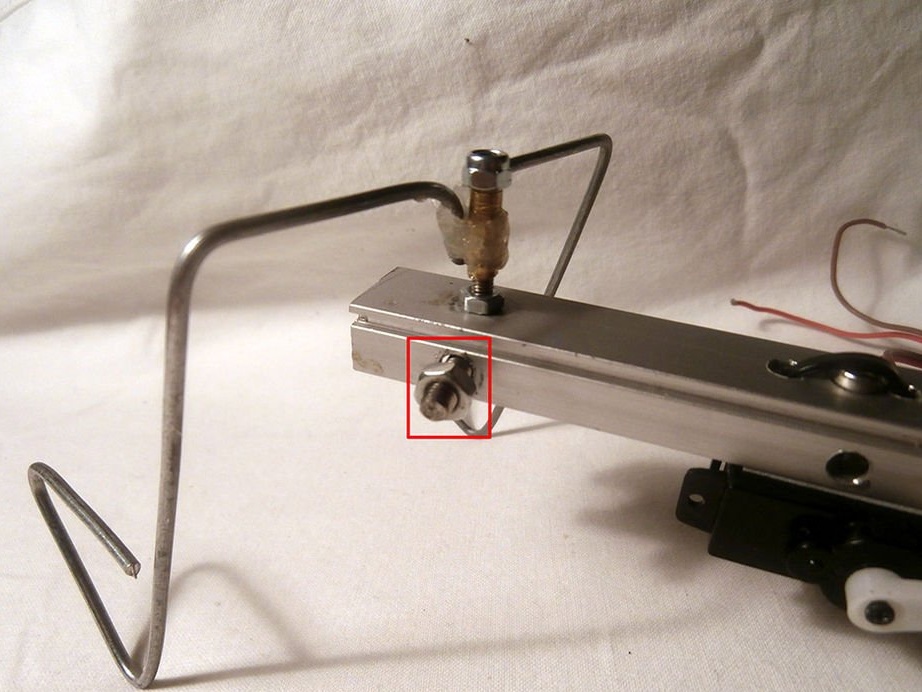
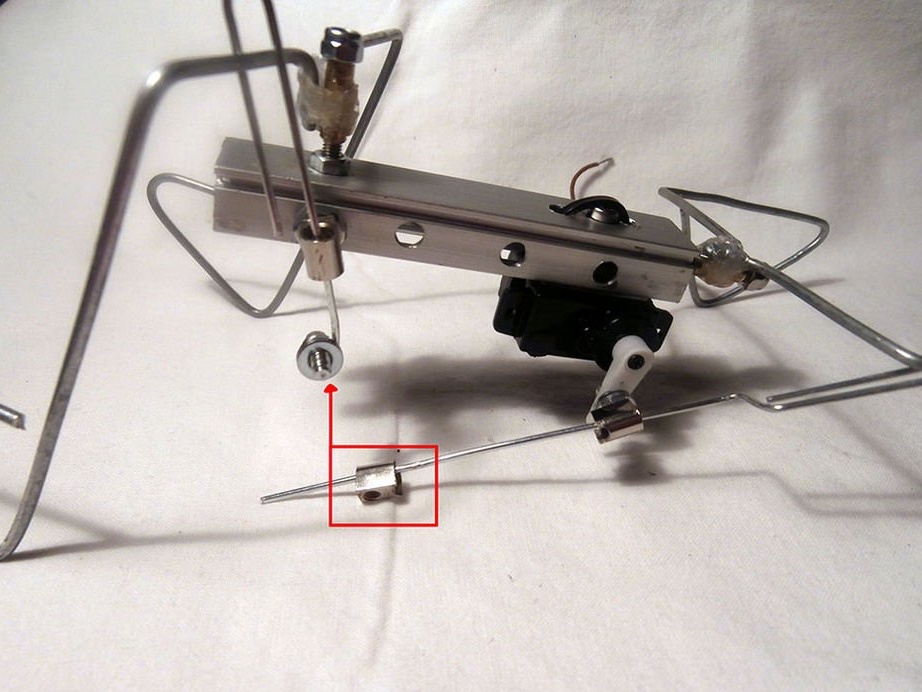
Bước 10: Gắn ly hợp
Bước 11: lần chạm cuối cùng
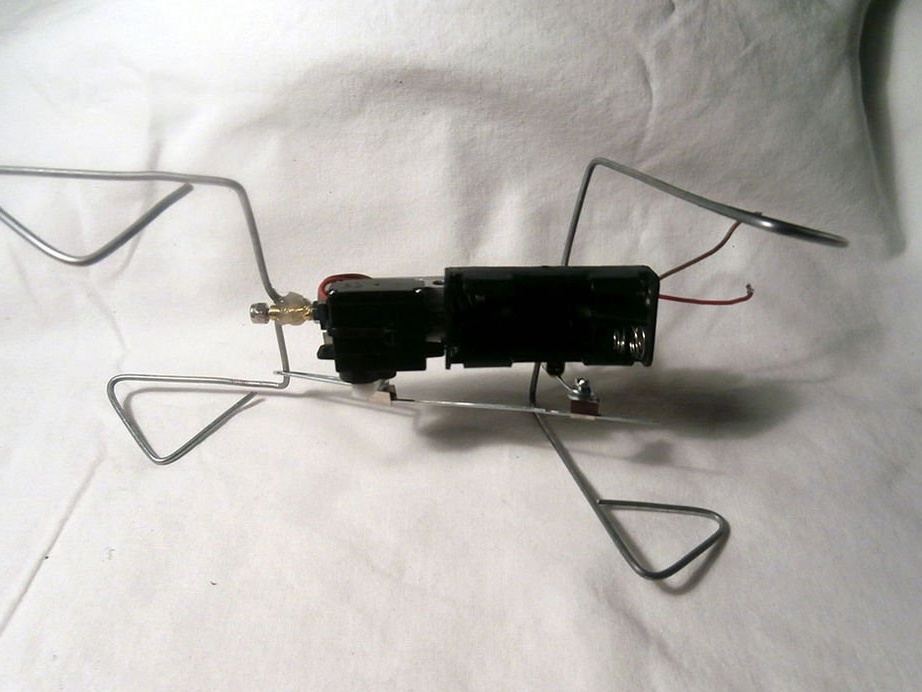
Cuối cùng, chỉ cần nối dây servo và pin, và người máy Owl sẽ bắt đầu một hành trình quanh nhà của bạn :)