

Để làm một con robot như vậy bằng chính đôi tay của bạn sẽ không hề khó khăn và thậm chí thú vị. Kết quả là một thiết bị rất thú vị sẽ hoạt động như một sinh vật sống. Tất cả điều này nhờ vào hai động cơ nhỏ, chúng là những người điều khiển robot. Bằng cách thay đổi góc tấn công của trục động cơ, bạn có thể làm cho robot nhanh hơn hoặc chậm hơn. Bạn cũng có thể thử nghiệm các mẹo khác nhau có thể được đeo trên trục động cơ.
Vật liệu và dụng cụ:
- hai động cơ nhỏ (3 Volts, có thể được tìm thấy trong đồ chơi trẻ em);
- giá đỡ pin (bạn có thể tự làm hoặc rút nó ra khỏi điều khiển từ xa cũ, đèn pin, v.v.);
- hai công tắc loại SPDT (chúng có thể được lấy từ một con chuột máy tính cũ);
- hai kẹp giấy nhỏ và lớn;
- một bánh xe nhỏ từ đồ chơi;
- hệ thống dây điện mỏng

Quy trình sản xuất:
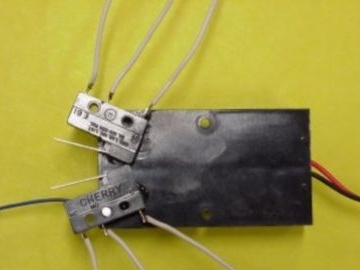
Bước đầu tiên. Hàn dây
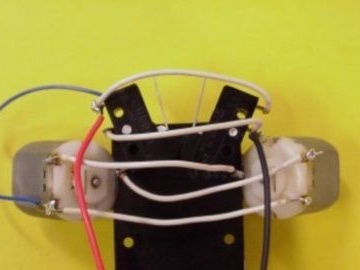
Trước hết, bạn cần chuẩn bị dây và hàn chúng cho tất cả các thành phần điện tử, để sau này thuận tiện để kết nối các nút. Các dây phải được cắt đến chiều dài 6 cm và loại bỏ khỏi đầu của chúng khoảng 1 cm. Bây giờ bạn cần hàn hai dây vào động cơ và công tắc. Ngoài ra, đừng quên hàn hai dây vào các tiếp điểm của giá đỡ pin. Các đầu khác của dây tốt nhất là đóng hộp.

Bước hai Cài đặt công tắc
Để đặt công tắc, bộ phận giữ pin phải được đảo lộn. Bây giờ bạn cần phải dán các công tắc bằng keo vào giá đỡ pin. Kết quả là chữ V nên hình thành.
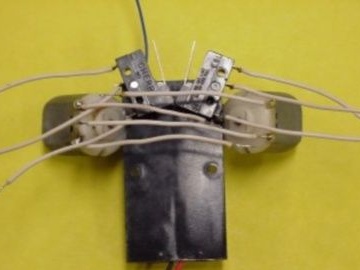
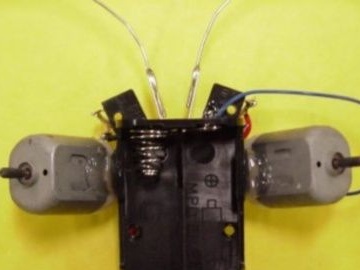
Bước ba Lắp đặt động cơ
Các động cơ phải được gắn vào giá đỡ pin ở một góc, như được chỉ ra trong hình. Các góc ở hai bên phải giống nhau, nếu không người máy sẽ không hoạt động đúng. Các trục động cơ phải nghỉ ngơi trên đường. Động cơ có thể được gắn bằng keo.

Bước bốn Lắp đặt bánh xe ổn định
Chất ổn định là cần thiết để tự làm đứng bẹp trên đường. Để làm bánh xe, bạn có thể sử dụng một con lăn từ máy ghi âm hoặc bánh xe từ đồ chơi trẻ em. Còn đối với các ứng dụng cắm điện tử, thì nó được làm bằng một kẹp giấy hoặc chuỗi dài.Tóm lại, chất ổn định dính đều vào giá đỡ pin.

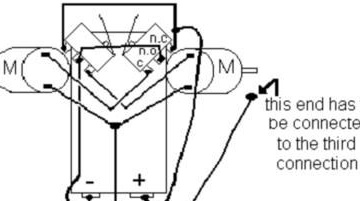
Bước năm Kết nối dây
Để robot hoạt động chính xác, tất cả các dây phải được kết nối rõ ràng theo sơ đồ. Các mạch có thể được nhìn thấy trong hình.

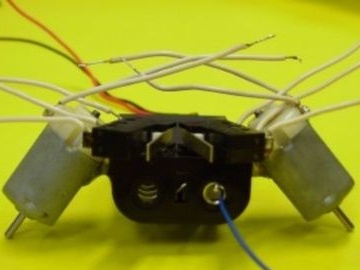
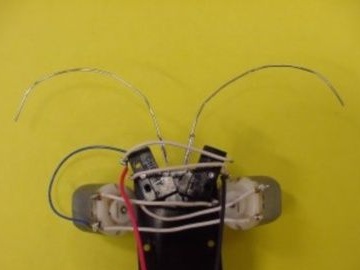
Bước sáu Làm ria mép cho lỗi
Bộ ria mép sẽ đóng vai trò là bánh xe cho con bọ, ngay khi gặp chướng ngại vật trên đường đi, ria mép sẽ bật công tắc, và sau đó các động cơ sẽ quay robot theo hướng khác. Khi công tắc được kích hoạt, một trong các động cơ sẽ tắt và một loại vi sai được kích hoạt. Nếu cả hai công tắc được kích hoạt, robot dừng hoàn toàn. Bộ ria mép được làm bằng kẹp giấy nhỏ, chúng phải được dán cẩn thận vào các nút của công tắc.

Bước thứ bảy. Sửa đổi và thử nghiệm cuối cùng của robot
Ở giai đoạn cuối, các đầu cao su phải được lắp đặt trên trục động cơ, chúng cần thiết để có độ bám tốt hơn. Chúng có thể được làm từ cambric.
Đó là tất cả, robot đã sẵn sàng. Bạn cần chạy nó trên một bề mặt nhẵn, ví dụ, trên bàn hoặc vải sơn. Vì bàn chân của bọ quá nhỏ, nó sẽ không bò dọc theo thảm, vì vậy điều này sẽ là cần thiết để tăng các mẹo trên trục động cơ.
Trong tương lai, robot có thể được nâng cấp theo ý của mình. Ví dụ, anh ta có thể làm cho đôi mắt LED sẽ sáng lên khi tiếp xúc với chướng ngại vật.