
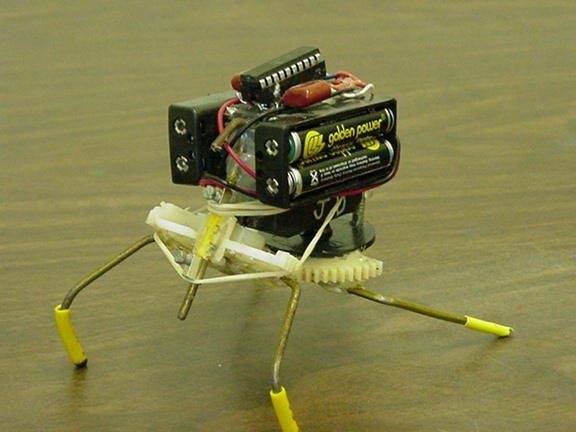
Không có gì thú vị hơn một robot đi bộ, bởi vì như vậy người máy bắt chước những sinh vật sống tốt nhất sống cùng chúng ta trên hành tinh của chúng ta. Để tạo ra một robot như vậy không khó, nhưng bạn cần phải có mong muốn và một số kỹ năng trong lĩnh vực điện tử.
Vật liệu và dụng cụ:
- một đoạn dây đồng;
- hai người giữ pin ngón tay;
- hai tụ gốm nguyên khối 0,22 mF mỗi tụ;
- một điện trở 3,3M;
- Chip biến tần bát phân 74NST240 cho tám kênh (một);
- 20 chân DIP 74XX240 hoặc 74XX245 (một);
- động cơ servo (một);
- công tắc;
- một bánh răng bằng nhựa;
- Đầu nối dây.
Quy trình sản xuất:
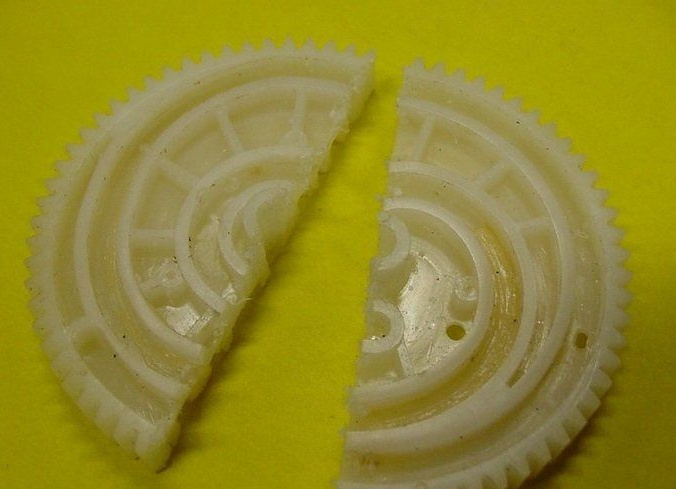
Bước đầu tiên. Chuẩn bị thiết bị
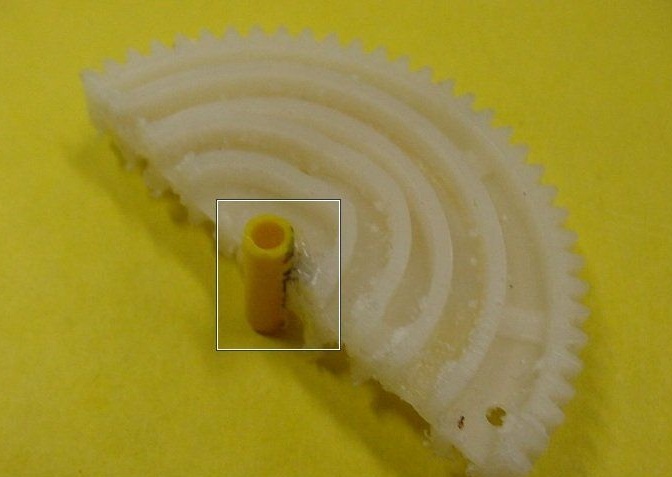
Bạn cần lấy bánh răng nhựa và cắt nó thành hai phần giống hệt nhau. Sau đó, bạn cần phải loại bỏ sừng và sử dụng keo để cố định nó vào một hình bán nguyệt.

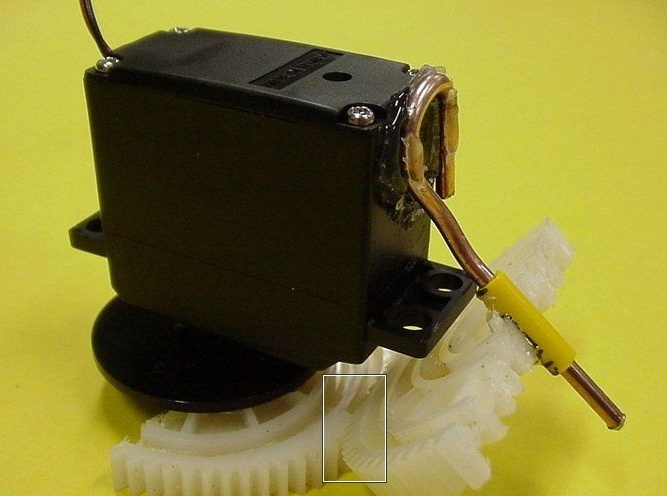
Bước hai Thay đổi động cơ
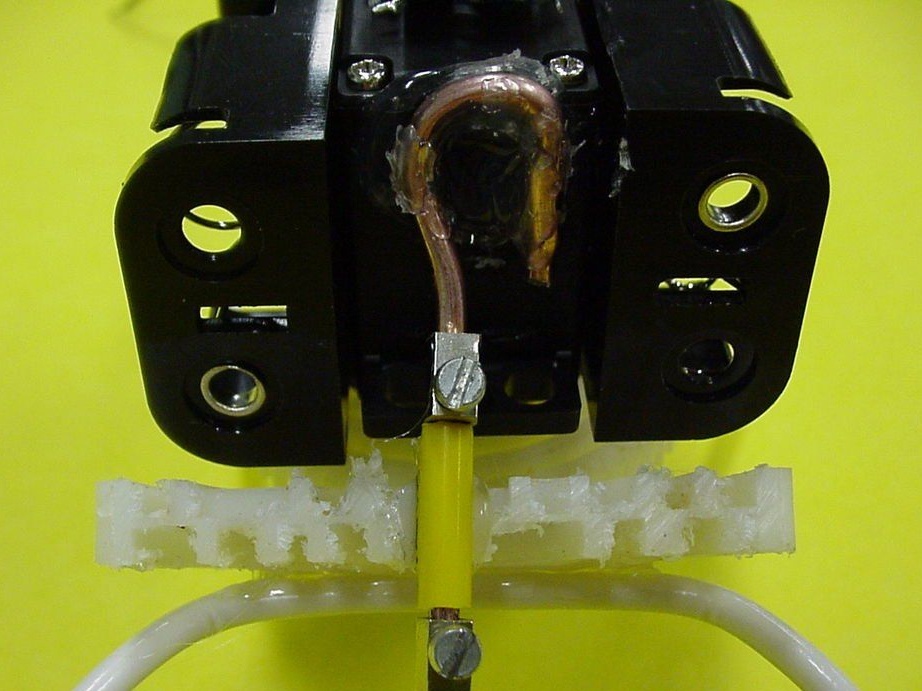
Động cơ servo phải được làm lại để nó chỉ hoạt động khi quay. Sau đó, bạn cần phải dán dây đồng vào nó, như được chỉ ra trong hình.
Ngoài ra ở giai đoạn này bạn sẽ cần một ống nhựa có đường kính phù hợp, nó phải được dán vào hình bán nguyệt. Sừng động cơ servo sau đó được đặt ở vị trí ban đầu của nó. Sau đó đặt một ống nhựa trên dây đồng. Ở giai đoạn này, công việc có thể được coi là hoàn thành.
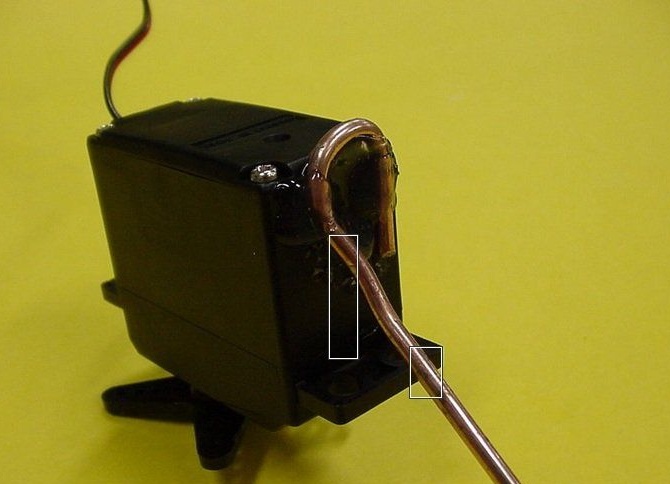

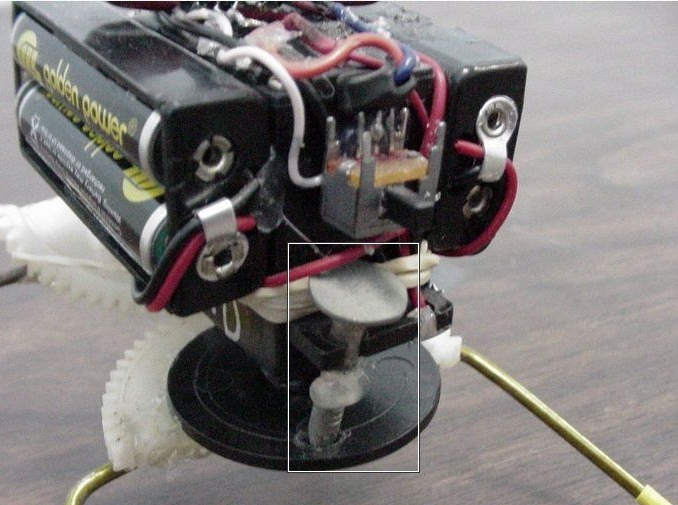
Bước ba Tạo và cài đặt bàn chân robot
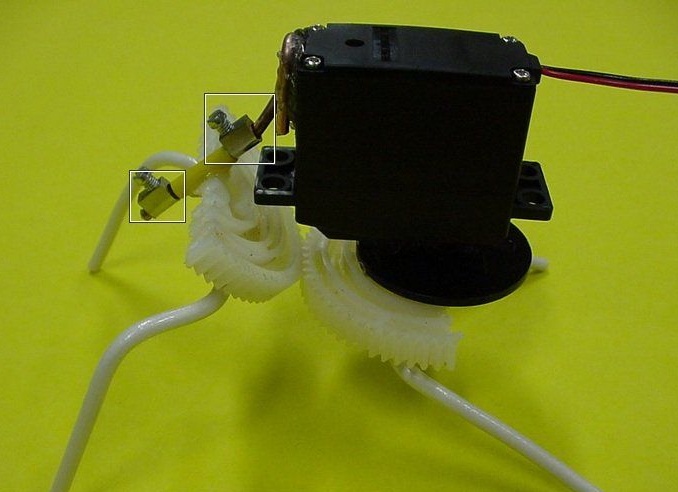
Dây đồng được sử dụng làm chân, nó phải được uốn cong như trong hình. Sau đó, tác giả dán bàn chân vào hình bán nguyệt. Bây giờ bạn cũng có thể gắn giá đỡ pin vào động cơ servo.


Bước bốn Làm việc với điện tử
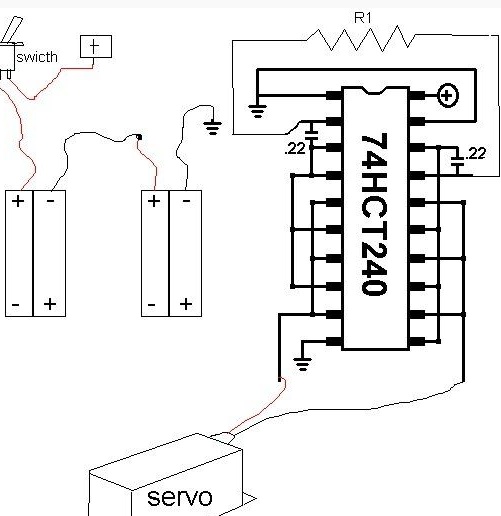
Có lẽ đây là thời điểm khó khăn và quan trọng nhất. Toàn bộ hệ thống phải được kết nối rõ ràng như được chỉ ra trong sơ đồ. Ngay sau khi kết nối robot sẽ sẵn sàng, và nó có thể được thử nghiệm.

Bằng cách thay đổi góc của chân, bạn có thể đạt được các đặc điểm khác nhau từ robot. Bạn có thể làm nó nhanh hơn hoặc chậm hơn. Bạn cũng có thể trang bị cho robot các điều khiển bổ sung, ví dụ như một bộ ria mép, qua đó nó sẽ xác định chướng ngại vật. Bạn cũng có thể trang bị cho robot một đôi mắt dưới dạng đèn LED, điều này sẽ tạo ra sự chân thực thậm chí còn lớn hơn giống như một sinh vật sống.
Bạn cần phải chạy một robot như vậy trên một bề mặt phẳng. Để ngăn chân anh ta bị trượt, Cambrices có thể được đeo ở đầu của họ.