
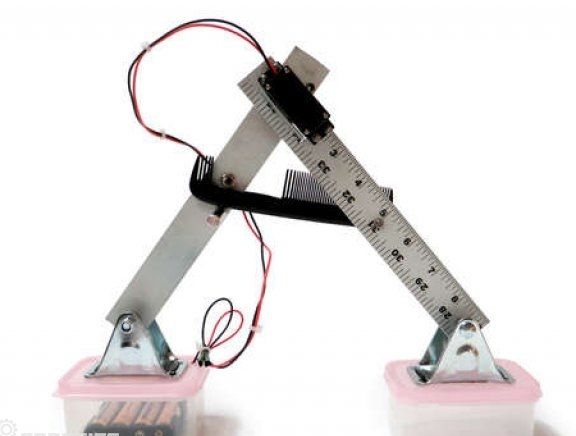
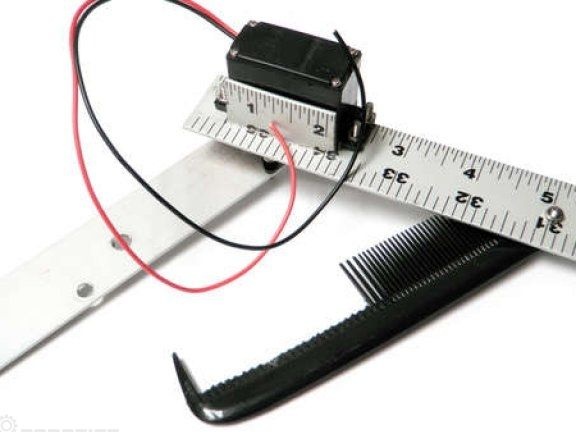
Điểm đặc biệt của một robot như vậy là nó được lắp ráp từ dây đo và đồ gia dụng. Robot đề cập đến loại đi bộ. Theo tác giả, với tất cả các công cụ và vật liệu cần thiết, việc lắp ráp một con robot như vậy sẽ chỉ mất vài giờ.
Vật liệu và dụng cụ để lắp ráp:
- động cơ servo được cấu hình để quay trực tiếp;
- Thước nhôm có kích thước 2 - 18 ";
- hai hộp đựng thức ăn nhỏ;
- hai con lăn có bánh xe kích thước 2 "- 3";
- một bút bi thông thường;
- một con sò;
- mười bu lông nhỏ có đai ốc;
- bốn vòng đệm nhỏ;
- một kim loại đối trọng 2 "- 3";
- bốn đinh tán;
- một loại công tắc DPDT;
- Giá đỡ pin AA;
- bốn pin AA;
- hai dây có màu khác nhau (đen và đỏ);
- băng keo điện.

Quy trình sản xuất robot:
Bước đầu tiên. Cắt thước
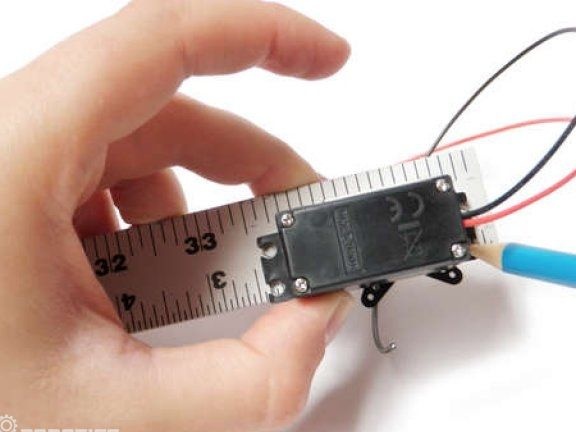
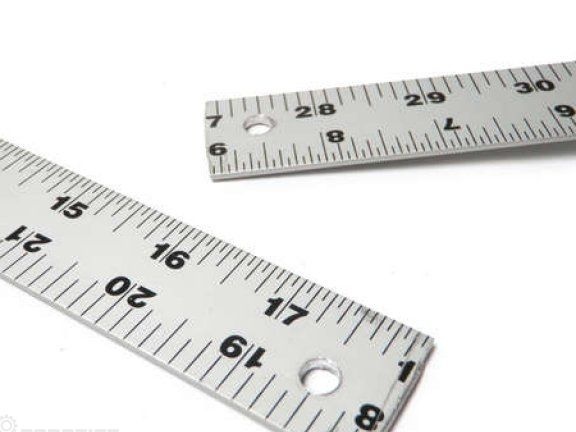
Đầu tiên bạn cần lấy một cây thước và cắt nó bằng cưa máy. Tổng cộng, hai phân đoạn chín inch nên được lấy.



Bước hai Tạo dấu
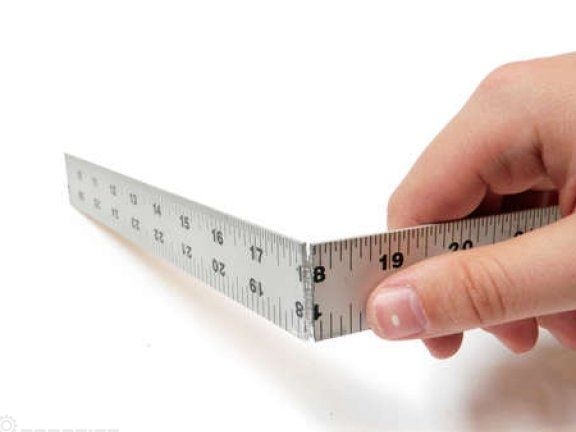
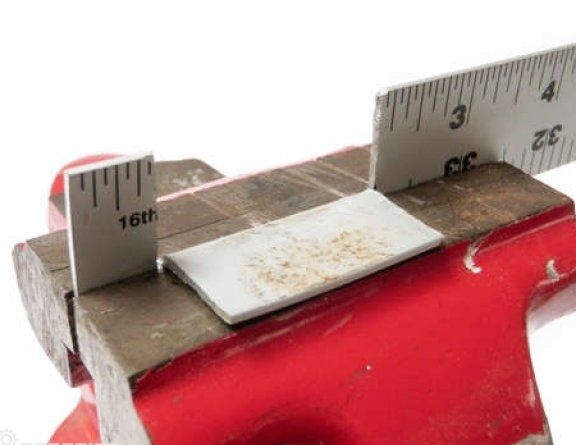
Trên một mảnh của thước kẻ bạn cần thực hiện hai vết rạch 3/4. Từ một cạnh, độ sâu của nó phải là 1/2 "và từ cạnh kia là 8/8". Tiếp theo, thước phải được kẹp trong một phó và sử dụng búa để uốn cong phần, đây sẽ là cơ sở để gắn động cơ.



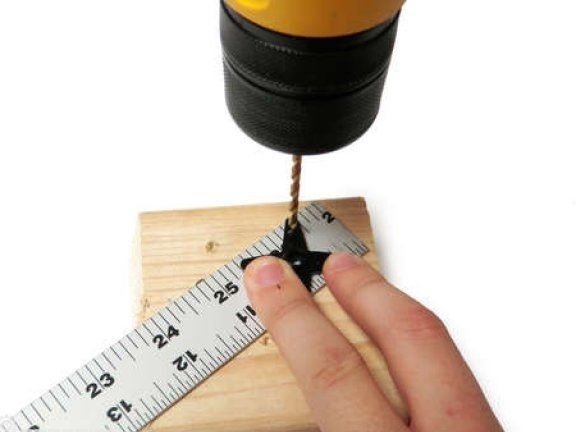
Bước ba Khoan lỗ
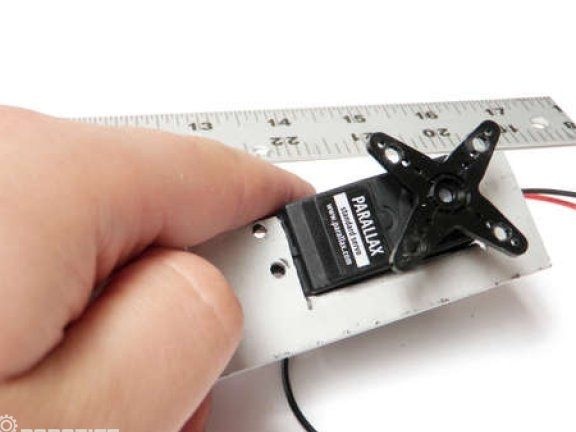
Bây giờ bạn cần phải lấy động cơ servo và gắn nó vào nơi nó sẽ được gắn. Sau đó, với một cây bút chì, bạn cần đánh dấu nơi mà sau đó bạn cần khoan các lỗ có đường kính là 1/8 ".



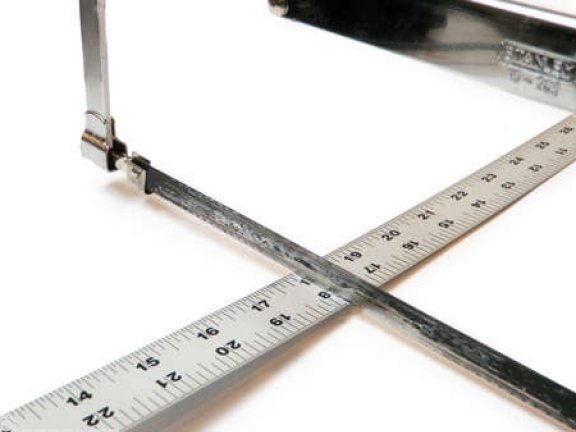
Bây giờ bạn cần khoan một lỗ 1/4 ", lùi lại từ cuối thước 1/2". Lỗ được khoan ở đầu đối diện từ nơi động cơ sẽ được lắp đặt. Phải khoan lỗ tương tự ở phần cuối của một thước khác.


Bây giờ bạn cần khoan lỗ trên các lưỡi servo, vì điều này chúng cần phải được loại bỏ. Tổng cộng, bạn cần khoan 4 lỗ như được chỉ ra trong ảnh với đường kính là 1/8 ". Tiếp theo, các lưỡi dao cần được gắn vào cạnh của thước, lùi lại từ cuối 1/2". Bây giờ bốn lỗ tương tự cần phải được thực hiện trong thước.





Và cuối cùng, bạn cần khoan lỗ 1/8 ", lùi lại từ vị trí lắp động cơ 5". Bạn cũng cần khoan 3/16 lỗ ở giá treo động cơ. Bạn cũng cần khoan một lỗ lớn khác mà vít servo phù hợp. Đó là tất cả, tất cả các lỗ để lắp ráp cấu trúc đã sẵn sàng.
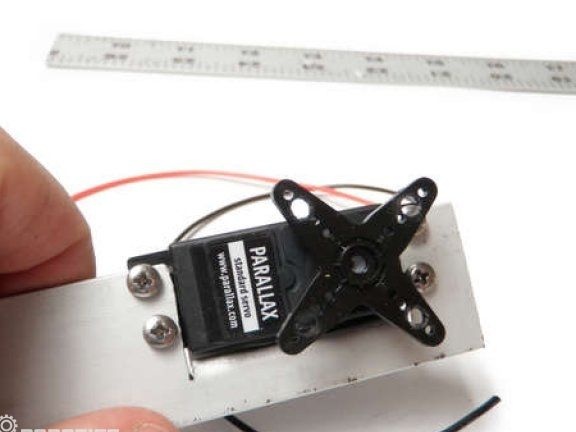
Bước bốn Lắp đặt động cơ
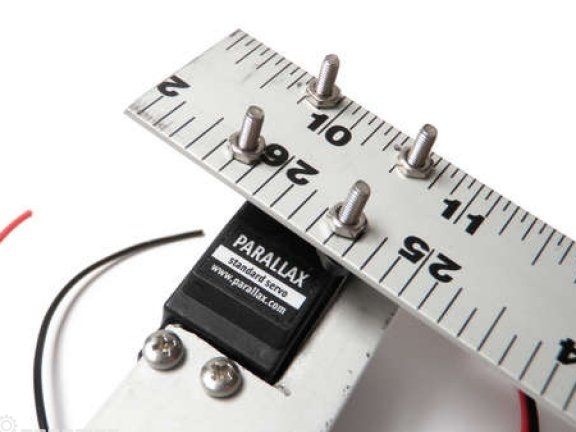
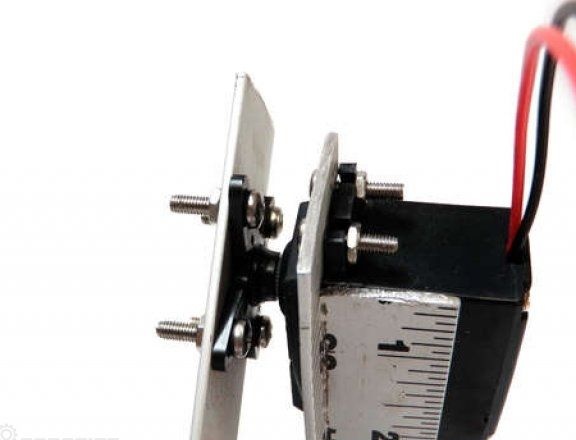
Động cơ phải được gắn trên một thước kẻ với các đai ốc và bu lông.Để đảm bảo cấu hình thấp, các đầu vít phải được đặt ở phía bên của các cánh servo. Sau đó, nửa sau của thước phải được gắn vào lưỡi của động cơ servo. Trong trường hợp này, các đầu vít phải được quay vào trong để không có gì cản trở sự di chuyển của những người cai trị.

Bước năm Chuẩn bị sò điệp
Ở một bên của sò điệp, cần loại bỏ hai inch răng. Cách dễ nhất để làm điều này là với một máy cắt bên. Ở rìa của con sò bạn cần để lại một số lượng đinh hương nhất định, nhờ có chúng, chiếc lược sẽ tiếp tục theo dõi. Ở rìa, bạn cần khoan lỗ 1/8 ". Ở giai đoạn cuối, lược được chà nhám cẩn thận bằng giấy nhám đến trạng thái mịn.






Bước sáu Cài đặt sò điệp
Một ốc vít phải được đưa vào lỗ của con sò, sau đó phải đặt hai vòng đệm vào vít, chúng sẽ cho phép bạn lấy lược từ thước kẻ đến một khoảng cách nhất định. Ở giai đoạn cuối, bu lông được lắp đặt trong một thước kẻ, và sau đó sò được cố định bằng một đai ốc.

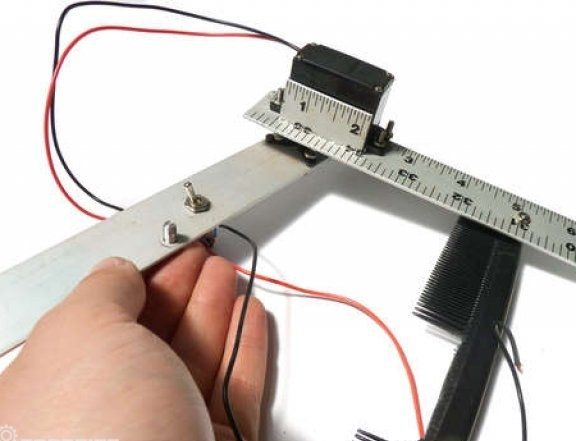
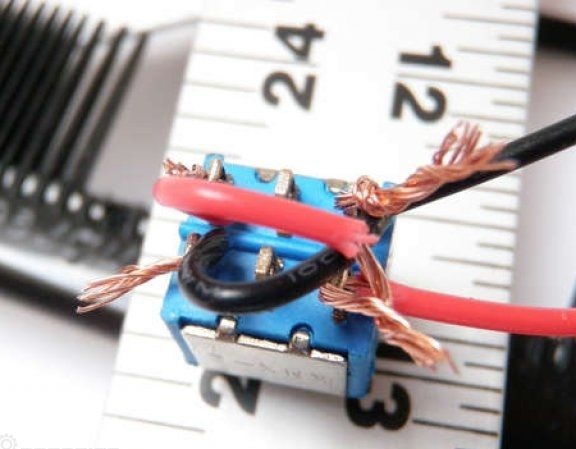
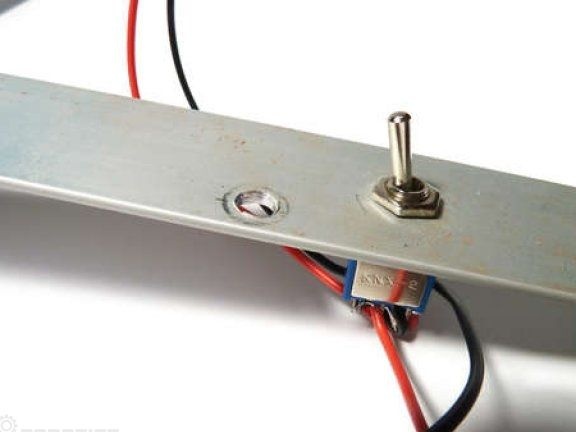
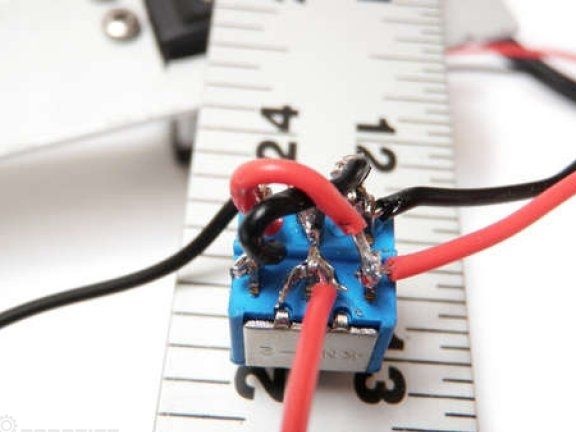
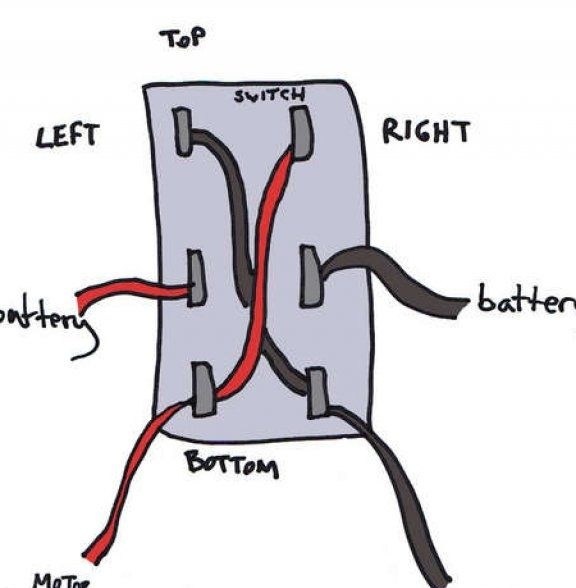
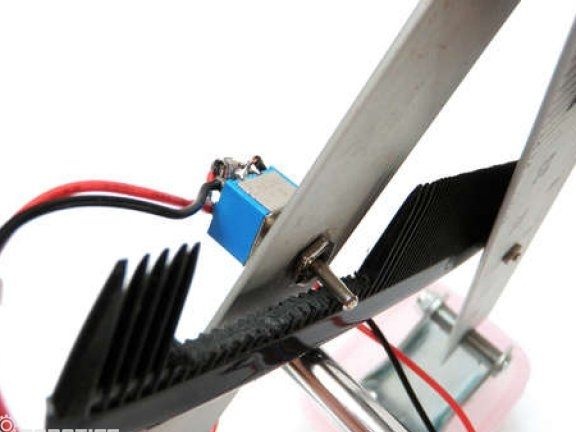
Bước thứ bảy. Công tắc lắp
Công tắc phải được đưa vào lỗ đã chuẩn bị và được bảo đảm bằng đai ốc. Công tắc phải được chèn vào vị trí được chỉ ra trong ảnh. Bây giờ bạn cần lấy hai mảnh dây, đỏ và đen, và hàn chúng vào công tắc như trong hình. Sau đó, bạn cần hàn hai dây dài vào các tiếp điểm bên của công tắc.

Bước Tám. Đối trọng lắp đặt.
Đối trọng được cài đặt trong phần đó của dòng nơi động cơ servo được cài đặt. Chiếc lược được gắn trên đầu của đối trọng.
Bước Chín. Cắt tay cầm
Lấy ống từ bút bi và sau đó cắt bút thành hai mảnh một inch. Tiếp theo, các ống được sản xuất cần phải được cắt làm đôi, kết quả là bốn ống sẽ ra.


Bước mười Khai thác bánh xe
Bây giờ bạn cần phải lấy hai con lăn và tháo rời chúng bằng cách tháo các bánh xe. Bánh xe cần phải được đặt sang một bên, chúng có thể được sử dụng trong những người khác. tự làm.



Bước mười một. Tạo điểm mấu chốt
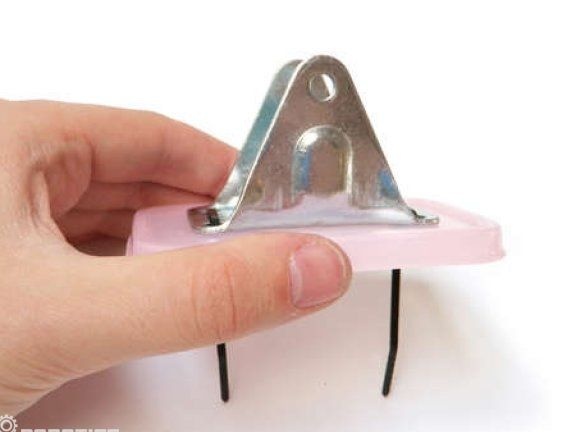
Vỏ từ con lăn phải được đặt ở giữa nắp của hộp nhựa. Bây giờ bạn cần khoan bốn lỗ và bảo vệ phần tử bằng dây buộc.


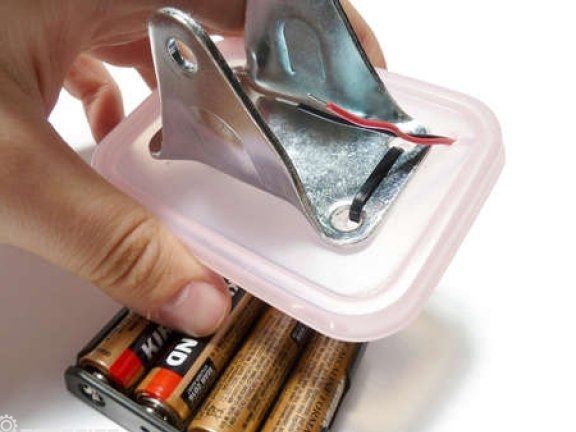


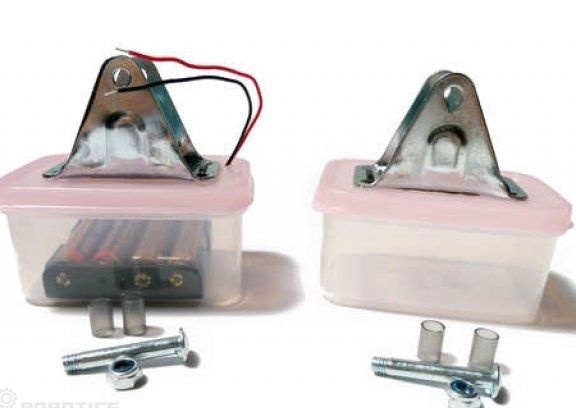

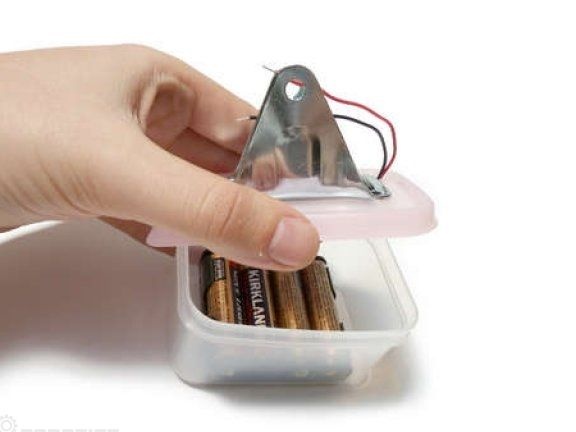

Cũng trong giai đoạn này, bạn có thể cài đặt một nguồn năng lượng. Để làm điều này, trong một trong các thùng chứa, bạn cần khoan một lỗ và lắp pin bên trong. Sau đó, thông qua lỗ khoan, bạn cần xuất dây.
Bước mười hai. Lắp ráp robot
Tiếp theo, các đầu của cả hai thước đo phải được gắn vào các giá đỡ như được chỉ ra trong các bức ảnh. Bây giờ nó chỉ còn để kết nối các dây từ nguồn và công tắc, nó dễ dàng thực hiện theo màu sắc của dây.
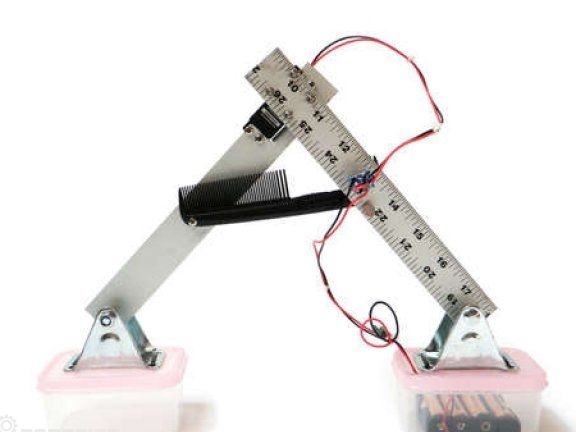
Đó là tất cả, robot đã sẵn sàng. Khi động cơ đang chạy, robot bắt đầu di chuyển, đến một lúc nào đó, con sò sẽ tắt nguồn và chân của robot trở về trạng thái ban đầu. Sau đó, công tắc bật lại mạch và chân của robot được nén lại. Vậy anh sẽ đi.