

Robot DIY sẽ là một món đồ chơi tuyệt vời cho trẻ em, cũng với nó, bạn có thể chơi người thân hoặc bạn bè. Bản chất của robot là như sau. Nó là một hộp có công tắc. Ngay khi ai đó nhấp vào công tắc trên hộp, một cánh cửa bắt đầu mở ra, từ đó một bàn tay đưa ra và đưa công tắc trở lại trạng thái ban đầu. Mặc dù sự đơn giản bên ngoài của robot, trên thực tế, tất cả điều này trông khá buồn cười.
Cơ sở để tạo ra một robot là một mạch Arduino. Ngoài ra còn có một số yếu tố cơ học sẽ được thảo luận dưới đây. Hãy xem xét chi tiết hơn làm thế nào có thể tự làm lắp ráp một robot như vậy.
Vật liệu và công cụ để sản xuất:
- Bảng Arduino, bất kỳ với đầu ra PWM sẽ làm;
- động cơ servo, hai mảnh (phù hợp mô hình Futaba - S3003, sức mạnh của một động cơ như vậy đủ để mở cửa, thiết bị tạo ra công suất lên tới 3,2 kg / cm);
- pin;
- loại chuyển đổi SPST hoặc SPTT;
- một công tắc để kiểm soát năng lượng pin;
- bạn cần một nút để khởi động lại Arduino;
- dây, nhảy và những thứ nhỏ khác.

Ngoài ra, bạn cũng sẽ cần một hộp số (phù hợp với ô tô điều khiển bằng radio), một bảng cho một động cơ điện gọi là lá chắn động cơ Arduino, động cơ RC servo. Các thành phần này là cần thiết để làm cho hộp di chuyển, giống như tác giả.
Để giảm độ ồn trong quá trình hoạt động của thiết bị, cần có tụ điện loại điện phân có giá trị danh nghĩa là 10mF, điện trở 10K và biến tần 74HC04.
Quy trình sản xuất robot:
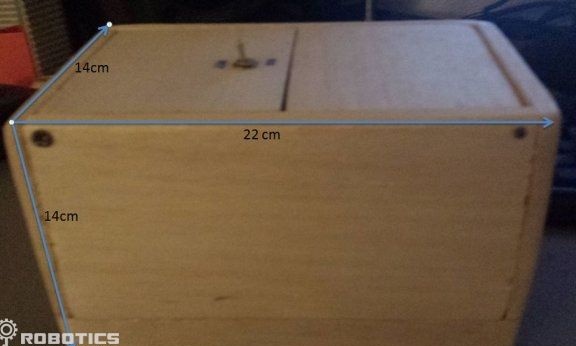
Bước đầu tiên. Cách làm hộp
Để tạo ra một hộp, tức là một cơ thể robot, bạn cần tìm gỗ dán hoặc nút chai. Ngoài ra, bạn cần một loại keo mạnh mẽ để dán gỗ. Điều quan trọng là phải hiểu rằng cấu trúc càng nặng, năng lượng sẽ được tiêu thụ càng nhiều. Đối với kích thước của hộp, nó là 22cm x 14cm x 14cm.
Bước hai Sơ đồ e bộ phận
Phần đầu của robot bao gồm một bo mạch chính Arduino, hai động cơ servo và một công tắc. Đối với mạch, chịu trách nhiệm về lượng nhiễu, nó có thể được thay thế bằng một điện trở thông thường.
Ổ đĩa servo được cấp nguồn thông qua chân thứ năm của bo mạch Arduino. Đối với các dây tín hiệu, chúng được kết nối với các tiếp điểm 9 và 10. Nhờ các tiếp điểm PWM này, góc quay của các động cơ servo được điều khiển. Đây là một góc từ 0 đến 180 độ.
Nút màu đỏ là cần thiết để khởi động lại Arduino.
Ở dưới cùng của mạch là bảng lá chắn động cơ Arduino.Trên bảng, bạn có thể thấy hai kênh A và B, nhờ chúng, nếu muốn, bạn có thể kết nối hai động cơ cùng một lúc. Nhiệm vụ chính của bảng này là với nó, bạn có thể lập trình cài đặt tốc độ quay, hướng, ngắt cho bất kỳ kênh nào của động cơ. Nếu bạn nhìn vào sơ đồ, thì kênh B được sử dụng, trong khi tiếp điểm 13 xác định hướng, tiếp điểm 11 là tốc độ và tiếp điểm 8 được sử dụng để điều khiển phanh.
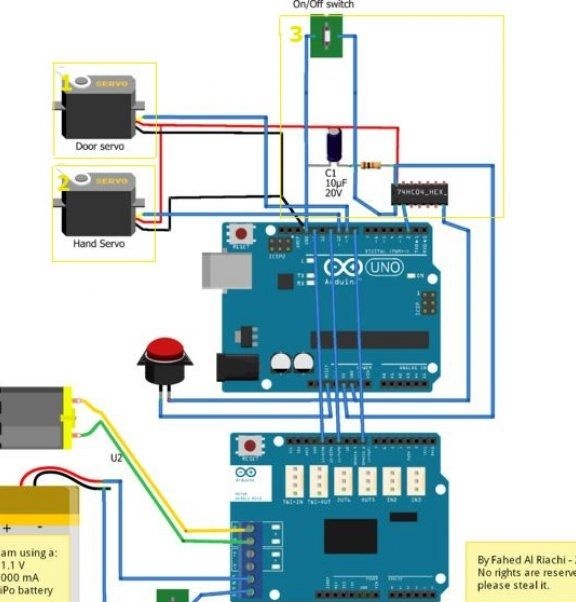
Nguồn năng lượng là pin 11,1 / 1000 mA, nó kết nối với bảng bảo vệ động cơ Arduino. Nếu nó sẽ không được sử dụng, thì pin được kết nối trực tiếp với bo mạch chính.
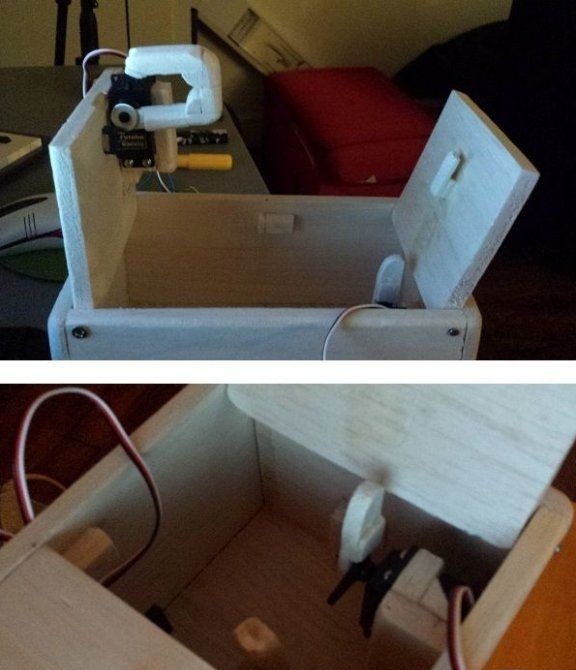
Bước ba Lắp đặt động cơ
Ổ đĩa servo và tay được cài đặt thử nghiệm, bạn cần kiểm tra trong thực tế xem các cơ chế có hoạt động chính xác không. Để kiểm tra bán kính sai lệch của động cơ, bạn có thể sử dụng chương trình Arduino IDE.
Đối với việc sản xuất gỗ lấy tay của bất kỳ loại nào. Điều chính là nó là ánh sáng, vì nếu không tiêu thụ năng lượng sẽ tăng lên. Đối với kích thước của bàn tay, nó được điều chỉnh trong quá trình cài đặt, chọn độ dài mong muốn, đạt được hiệu quả mong muốn.
Bộ phận đẩy và tay được gắn để chúng không chạm vào động cơ servo trong khi hoạt động.
Bước bốn Chúng tôi kết nối động cơ servo và chuyển sang Arduino
Sử dụng dây và bộ nhảy, bạn cần kết nối tất cả các yếu tố điện tử với nhau theo sơ đồ được chỉ định. Các dây phải được đặt sao cho chúng không can thiệp vào các yếu tố chuyển động của robot.
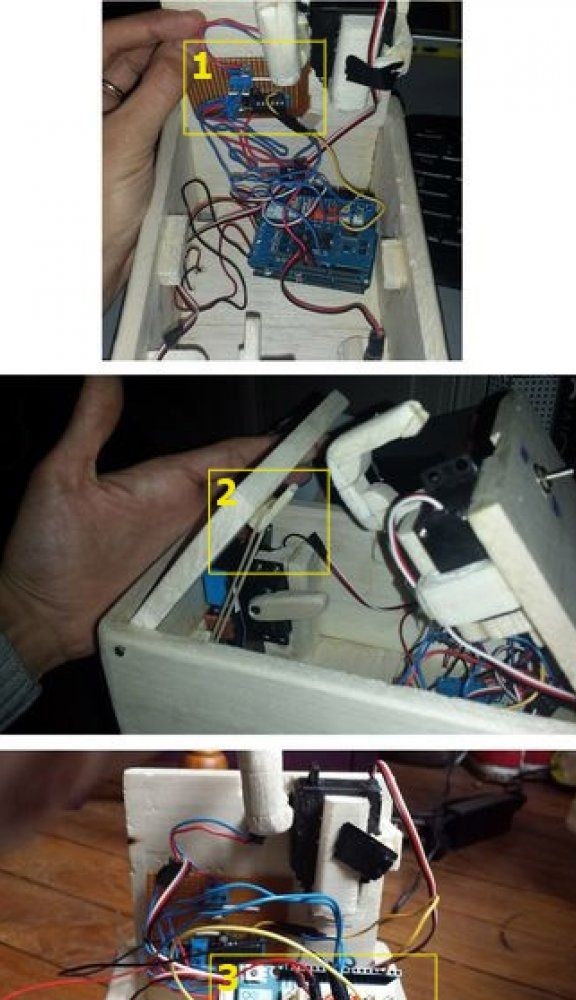
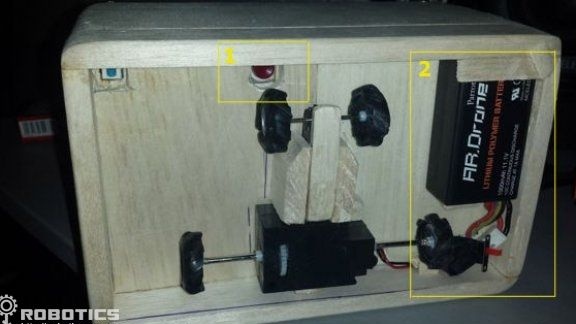
Trong số 1, bạn có thể thấy cách nó được kết nối và vị trí của mạch chuyển mạch. Số 2 đánh dấu một yếu tố như một dải đàn hồi, nó là cần thiết để cánh cửa mở ra với một số căng thẳng. Chà, số 3 chỉ ra lá chắn động cơ được cài đặt trên Arduino.
Bước năm Lắp đặt bộ phận cơ khí để di chuyển hộp
Ở dưới cùng của hộp là pin, động cơ có bánh xe, hộp số, nút đặt lại và công tắc bật tắt để điều khiển sức mạnh của robot. Trước khi gắn các yếu tố, bạn cần tính toán cân bằng trọng lượng của hộp. Để robot ổn định, ngoài trục dẫn đầu, một cái khác được cài đặt.
Bước sáu Một tính năng bổ sung khác
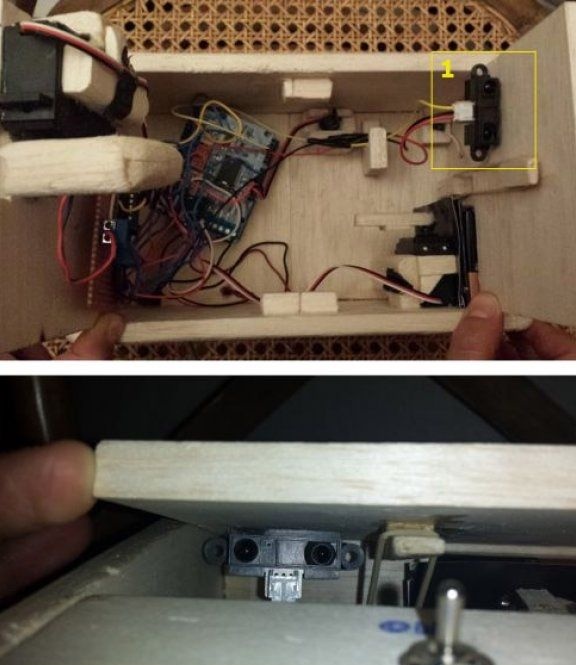
Để robot xác định hướng di chuyển, nó có thể được trang bị cảm biến hồng ngoại. Đồng thời, khi ai đó cố gắng chạm vào công tắc bật tắt, hộp sẽ di chuyển sang phải và trái. Đối với những mục đích này, cảm biến GP2Y0A21 là phù hợp, nó có ba dây. Màu vàng phải được kết nối với chân thứ ba của Arduino, màu đỏ đến chân 5 và màu đen với mặt đất.
Đó là tất cả, một robot đơn giản và đồng thời đã sẵn sàng. Một món đồ chơi như vậy sẽ mang lại niềm vui không chỉ cho trẻ mà còn khiến nhiều người lớn ngạc nhiên.
Chương trình cơ sở: