
Vật liệu và công cụ để sản xuất:
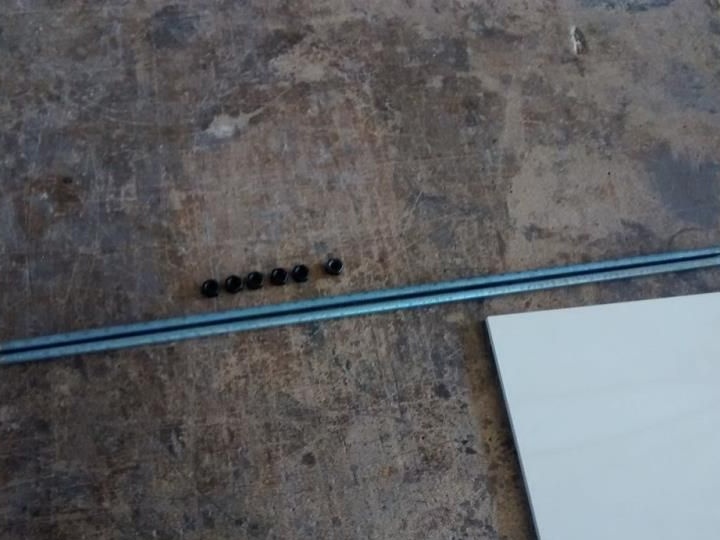
- trục ren;
- Ván ép;
- bu lông và đai ốc;
- vòng bi;
- động cơ bước như Nema 23;
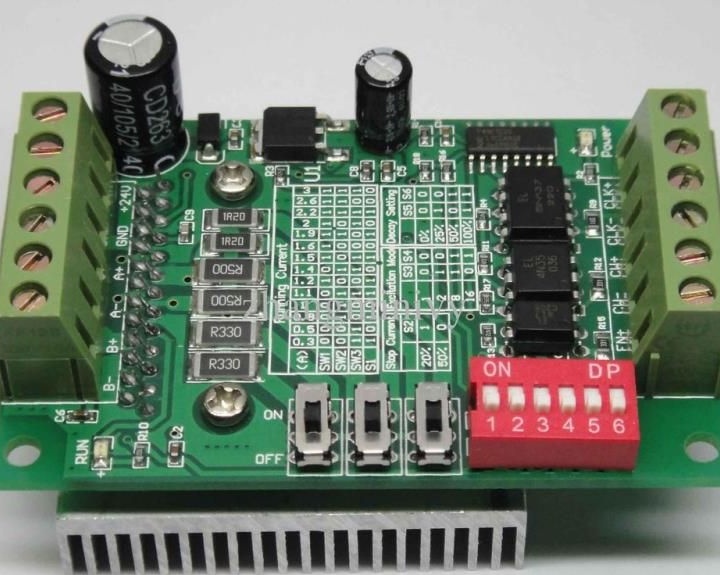
- Cần có trình điều khiển TB6560 cho động cơ bước;
- cài đặt được cung cấp bởi điện áp 24 V 15 A;
- Arduino UNO R3;
- ống lót kim loại, cũng như ống lót làm bằng nylon (có thể từ caprolon hoặc fluoroplastic);
- dây điện.









Quy trình sản xuất:
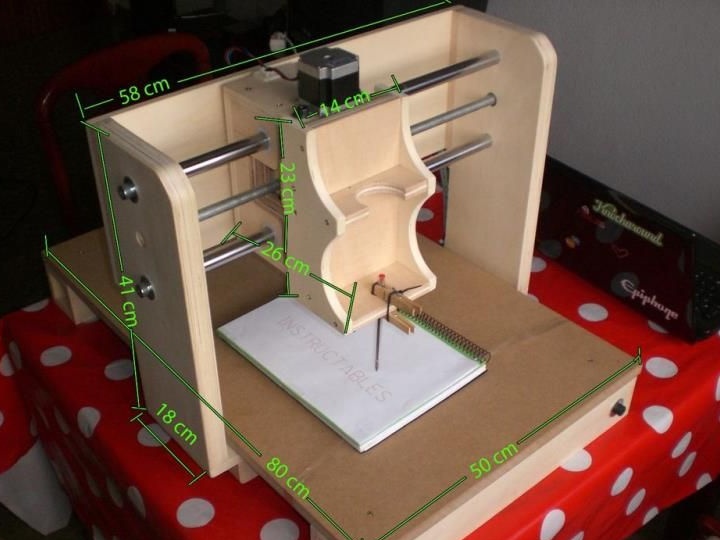
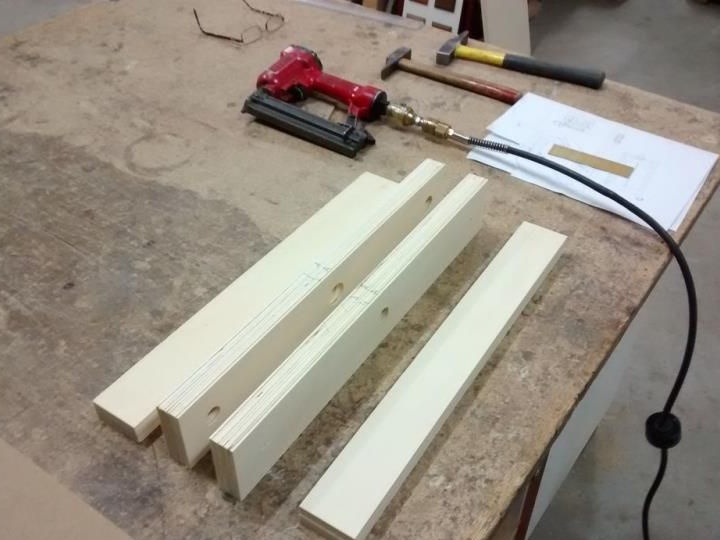
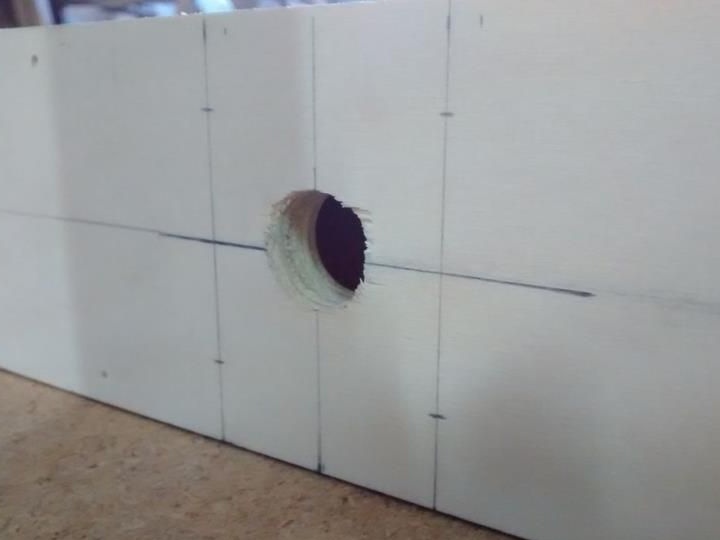
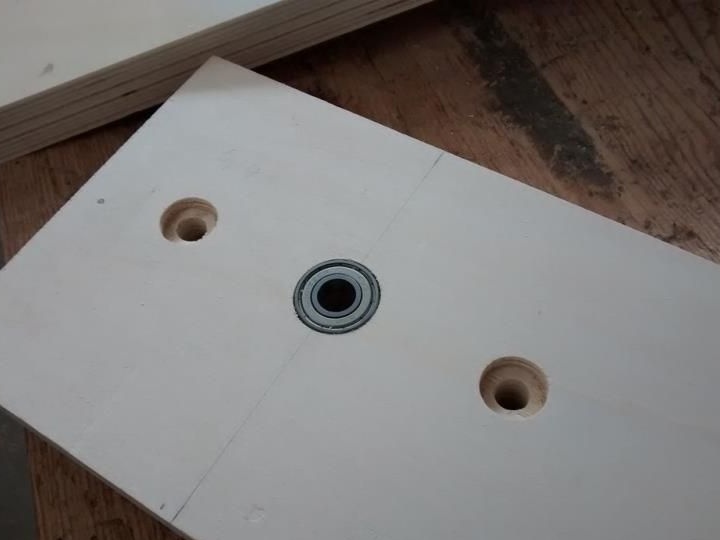
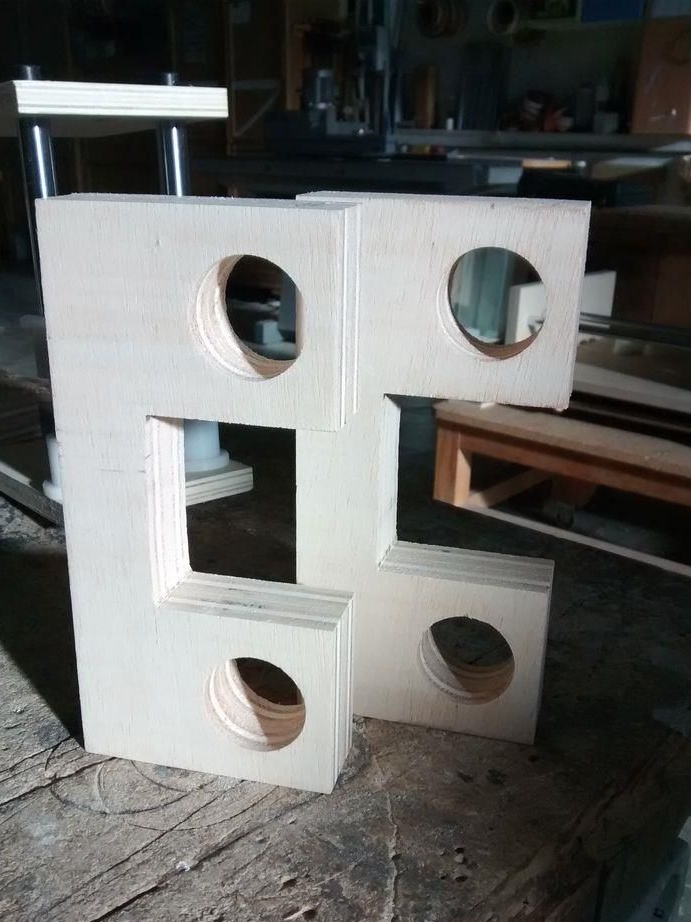
Bước đầu tiên. Làm đế của máy (trục X)
Để làm cơ sở, bạn sẽ cần một số thanh trong đó bạn sẽ cần khoan một số mù và thông qua các lỗ. Sau đó cài đặt trục kim loại, chúng phục vụ như một ổ đĩa cho trục X.
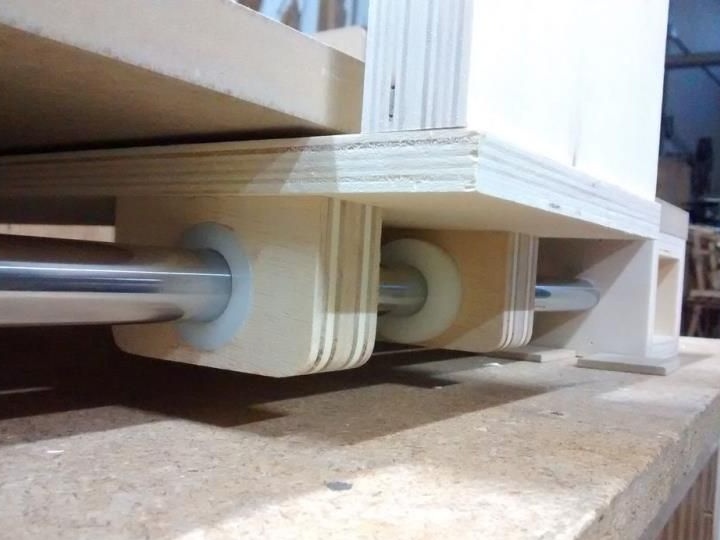
Trục ren được lắp đặt ở trung tâm và hai trục thép được lắp đặt ở hai bên làm hướng dẫn. Khi trục ren quay, cỗ xe di chuyển bàn có ren dọc theo trục X.
Thanh phải càng dày càng tốt, vì đế càng nặng thì máy càng đáng tin cậy trong quá trình hoạt động. Và điều này, đến lượt nó, cải thiện tay nghề trong quá trình làm việc.






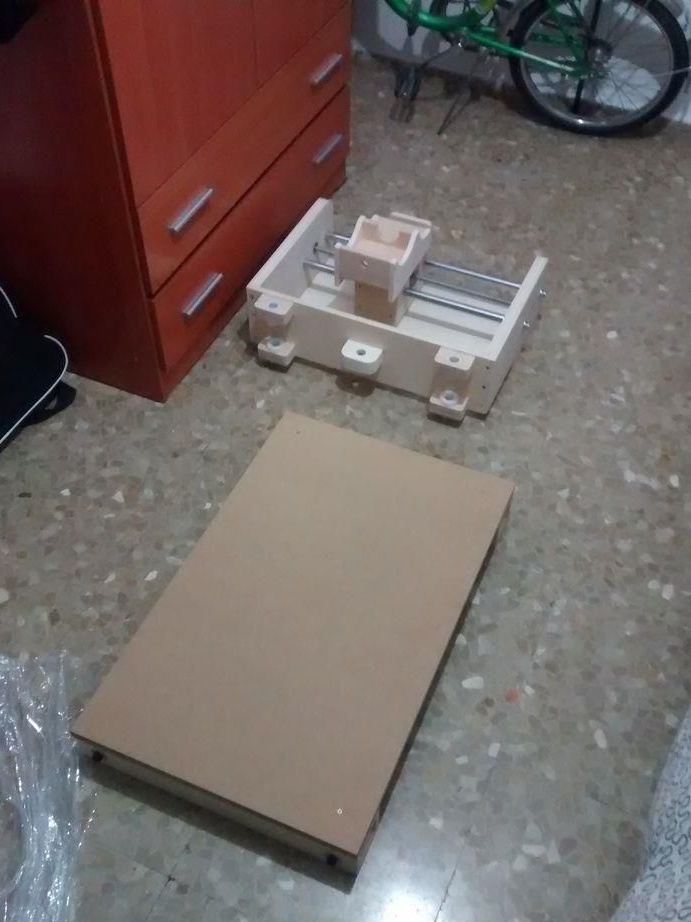
Bước hai Tạo trục Y
Cấu trúc cổng thông tin cho trục Y được tạo giống như cơ sở X. Cổng được cố định trên bảng có thể di chuyển, di chuyển dọc theo trục X. Như điều này xảy ra, bạn có thể thấy trong ảnh.




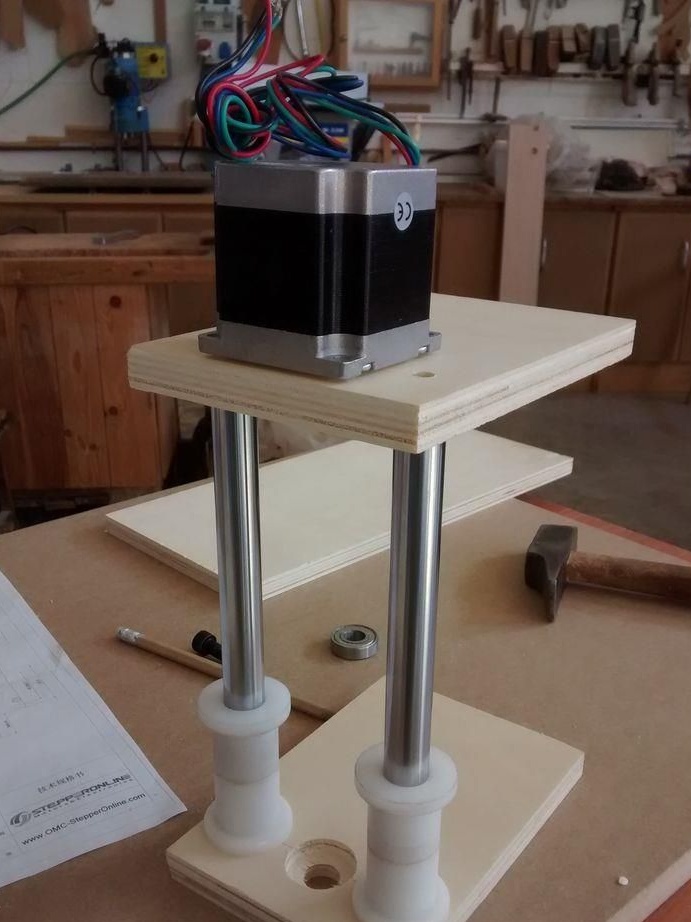
Bước ba Tạo trục Z
Trục Z được tạo chính xác như hai cái trước. Do trục này có một chuyển động thẳng đứng của cơ thể làm việc, cung cấp cho công cụ.











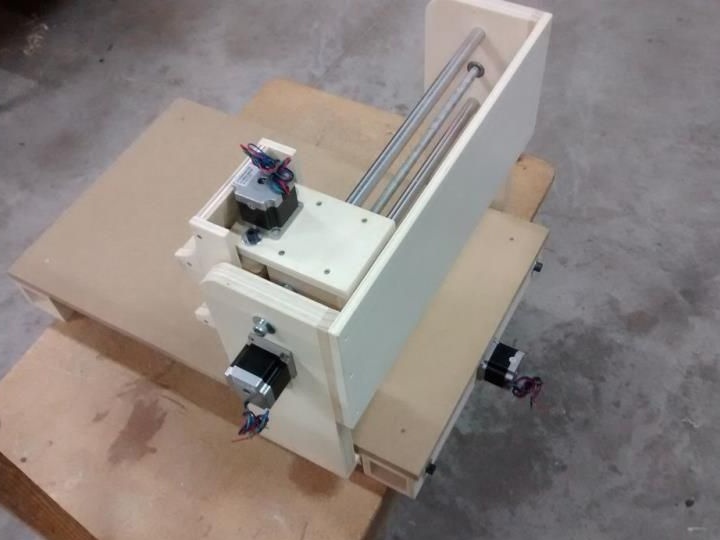
Bước bốn Lắp ráp lắp ráp
Hơn nữa, sau khi tất cả các yếu tố đã được sản xuất, máy có thể được lắp ráp và quá trình này không phức tạp. Để kết nối các phần tử, bu lông với đai ốc được sử dụng. Kích thước của máy có thể thay đổi, tất cả phụ thuộc vào nhu cầu cá nhân.Nếu trong quá trình lắp ráp bất kỳ phần tử nào bị hỏng, bạn không cần sử dụng keo để sửa chữa chúng, tốt nhất là tái sản xuất phần tử. Trong trường hợp này, độ cứng cần thiết của các yếu tố sẽ được cung cấp.


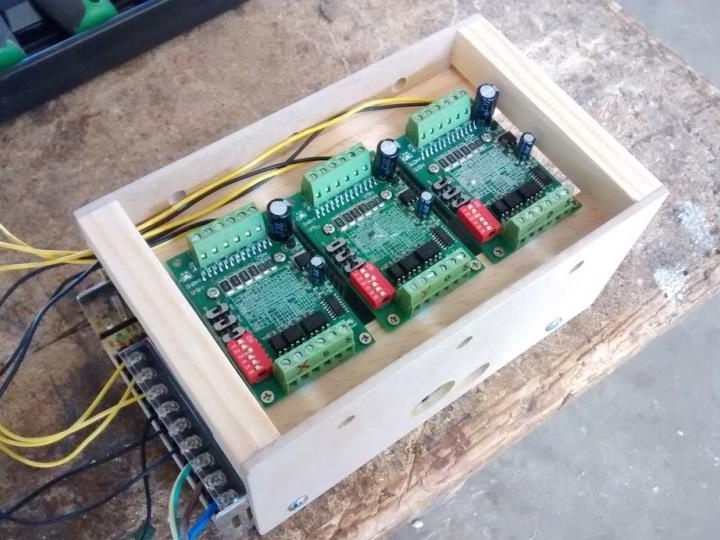
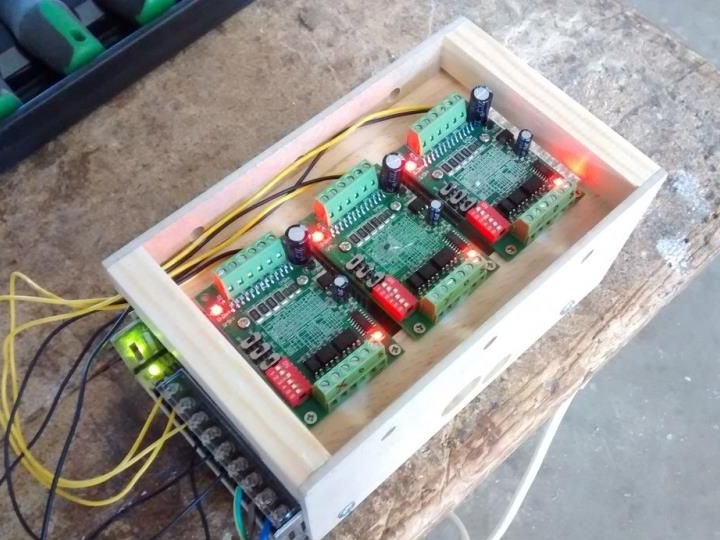
Bước năm Phần điện tử của thiết bị
Khi phần cơ khí được lắp ráp, bạn có thể tiến hành quá trình kết nối các thiết bị điện tử. Bạn cần kết nối Arduino với trình điều khiển và động cơ bước. Mỗi lái xe cần một nguồn năng lượng để làm việc. Tác giả đã sử dụng nguồn điện 24 V 15 A. Đối với người lái xe, ở đây nó đã được chọn riêng tùy thuộc vào công suất động cơ. Cuộn dây động cơ và cực của chúng được biểu thị bằng các chữ cái A +, A-, B +, B-.

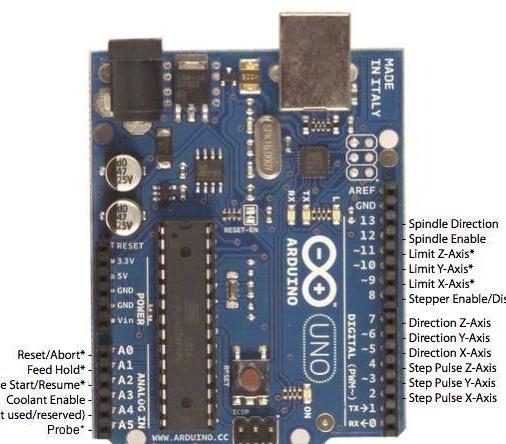



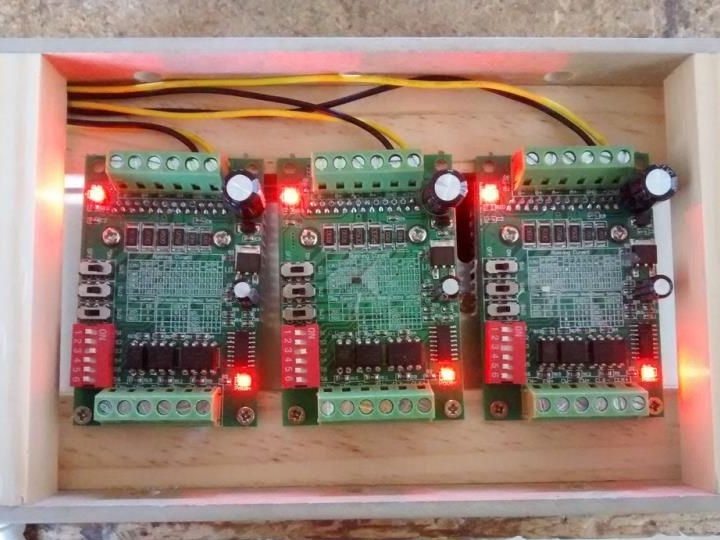

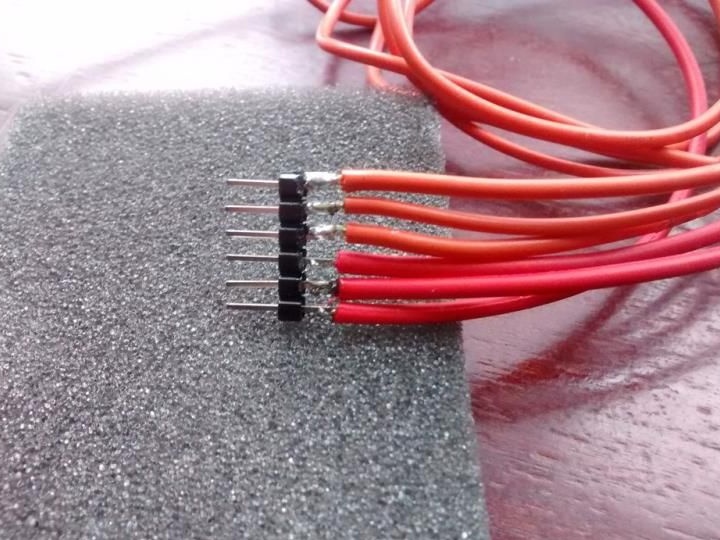
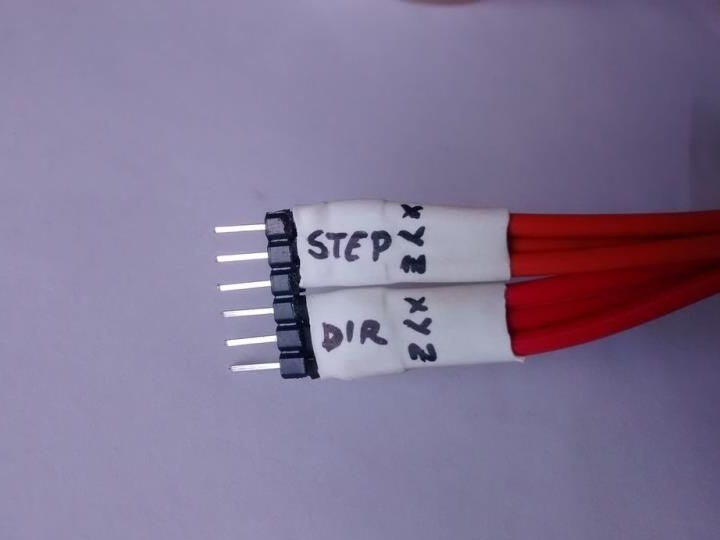

Đầu ra CLK + phải được kết nối với chân pin trên Arduino. Chân CW + phải được kết nối với chân định hướng. Chà, CLK- và CW cần được kết nối với chân GND. Danh bạ EN + EN- không được sử dụng.
Bước sáu Phần mềm của thiết bị
Bước tiếp theo là tải xuống phần mềm sẽ điều khiển máy. Quá trình không phức tạp, bạn cần tải xuống mã bằng chương trình XLoader trên bo mạch Arduino. Sau đó, bạn cần mở GCodeSender để kết nối bo mạch Arduino với máy tính cá nhân. Sau đó, bo mạch sẽ sẵn sàng điều khiển máy CNC.
Đó là tất cả, máy đã sẵn sàng, bạn có thể kiểm tra nó trong thực tế. Để đặt các tham số cần thiết để xử lý đối tượng, bạn cần sử dụng bất kỳ bản vẽ nào từ chương trình CAD. Sau đó, bằng cách sử dụng chương trình CAM, mã G được tạo. Với những mục đích này, thật thuận tiện khi sử dụng chương trình MasterCam X7. Nó đã có cả CAD và CAM.