

Bài viết sẽ xem xét một ví dụ về việc tạo ra một robot huyền thoại có tên là "Canbot". Phần lớn các chi tiết cho robot được in trên máy in 3D. Robot được điều khiển từ xa.
Vật liệu và công cụ cho tự làm:
- Một vi điều khiển Atmel Attiny85;
- hai microservice HXT900 hoặc các chất tương tự của chúng;
- một pin LiPo 3,7V;
- một đầu thu hồng ngoại ở 38kHz;
- Đầu dò siêu âm loại HC-SR04;
- Công tắc hoặc nhảy 9x4mm thay thế;
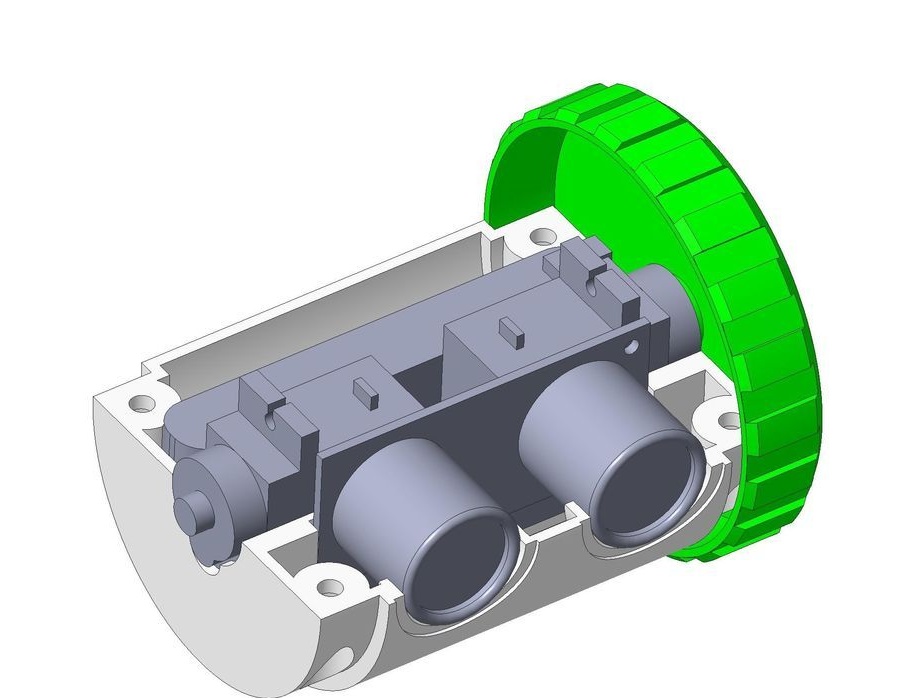
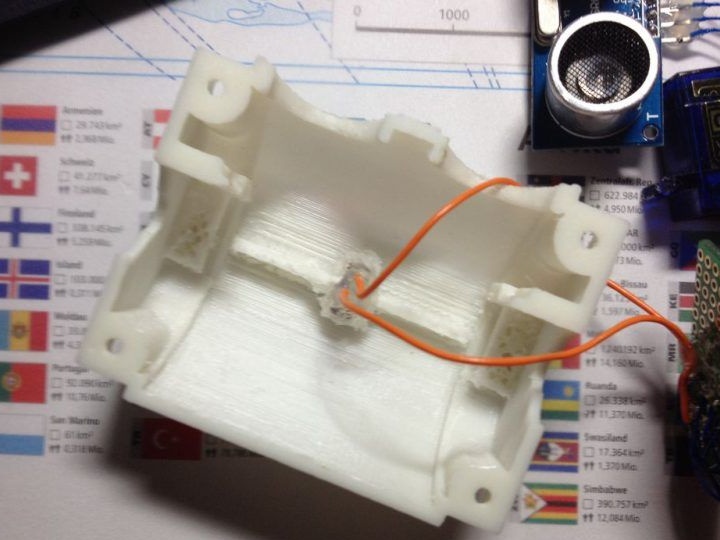
- Phần 3D (có thể). Nó sẽ mất một đỉnh (top.stl), một đáy (bottom.stl) và hai bánh xe (wheel.stl).
Tất nhiên, các công cụ hàn, keo nóng, tua vít, ốc vít, dây điện và những thứ nhỏ nhặt khác sẽ là cần thiết.

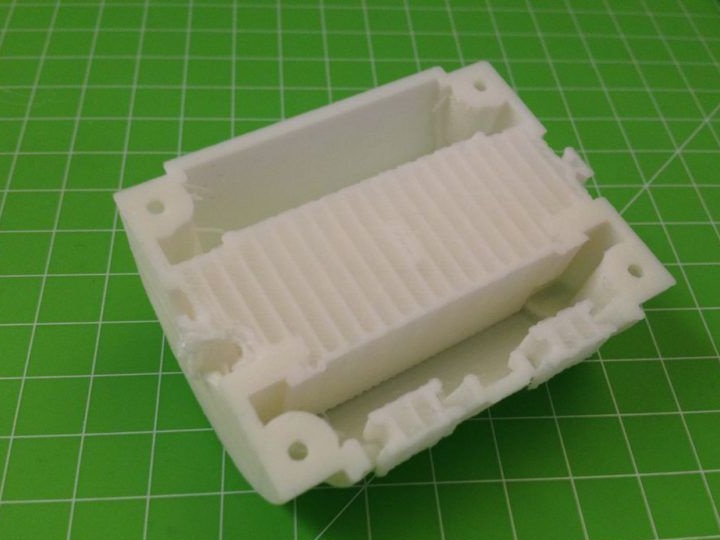
Các phần trên cùng và dưới cùng sẽ cần phải được in phẳng xuống bằng cách sử dụng tùy chọn cấu trúc hỗ trợ của Wap. Tùy thuộc vào loại máy in đã được sử dụng, phần cuối có thể cần được làm sạch ở cuối.
Quy trình sản xuất robot:
Bước đầu tiên. Điện tử một phần của robot
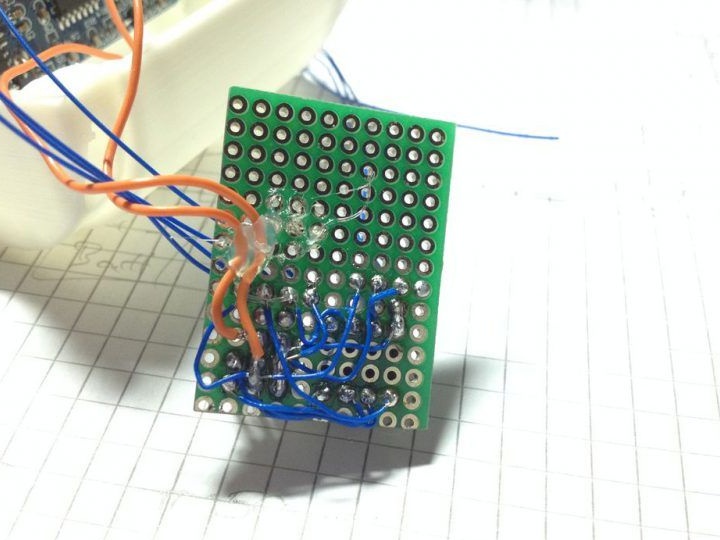
Đầu tiên bạn cần cấu hình các servo, chúng cần được chuyển đổi thành xoay liên tục. Làm thế nào để làm điều này, có rất nhiều hướng dẫn trên Internet. Vâng, sau đó tất cả các yếu tố điện tử sẽ cần phải được lắp ráp như được chỉ ra trong sơ đồ. Để lắp ráp phần điện tử thuận tiện, bạn có thể lấy một miếng nhỏ của bánh mì, cũng như dây mỏng.


Bước hai Phần mềm của robot
Nếu bạn tiếp cận quá trình tạo ra một robot có tính chuyên nghiệp cao nhất, thì phần mềm có thể được viết độc lập. Nhưng đối với điều này, bạn sẽ cần phải học một ngôn ngữ lập trình. Trong phiên bản đơn giản hơn, bạn có thể tải xuống mã làm sẵn và chỉ cần tải nó lên vi điều khiển.
Theo tác giả, tốt nhất người máy nhận tín hiệu hồng ngoại từ điều khiển từ xa thương hiệu Sony. Trong tương lai, sẽ cần thiết phải phản hồi lại Arduino và xuất dữ liệu thông qua hàm Serial.print (). Kết quả là, có thể tìm ra mã hóa trên mỗi nút.
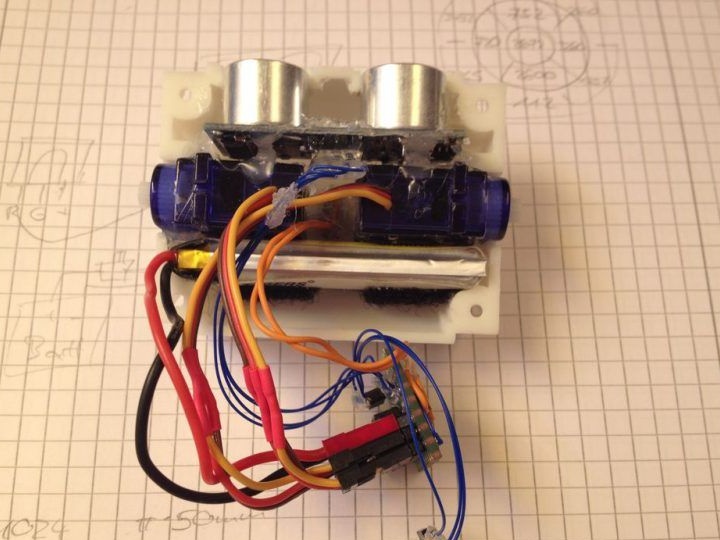
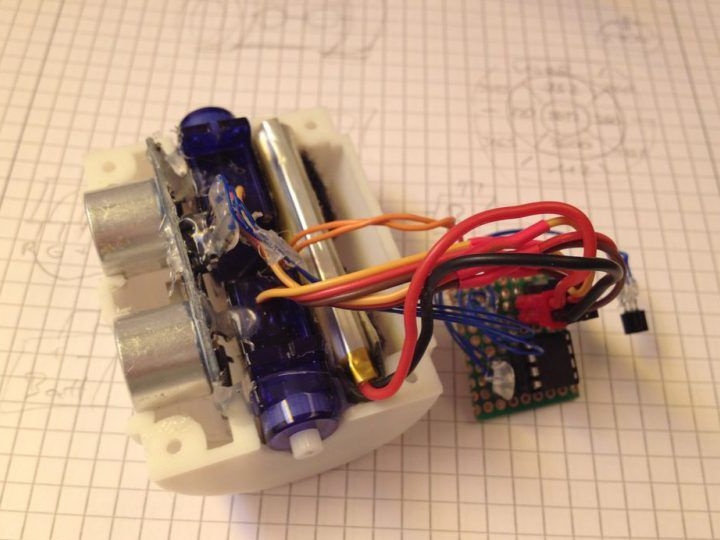
Bước ba Giai đoạn cuối cùng. Lắp ráp robot
Vâng, kết luận, robot đang đi. Đối với những mục đích này, bạn sẽ cần keo nóng. Với nó, bạn cần sửa dây để chúng không bị tắt khi robot di chuyển.Cũng cần phải sửa công tắc và sửa cảm biến siêu âm tốt. Tóm lại, vỏ của robot được kết nối bằng bốn ốc vít, do đó, nếu cần thiết, nó có thể dễ dàng tháo rời. Nhân tiện, ốc vít cho động cơ servo là hoàn hảo để gắn kết.

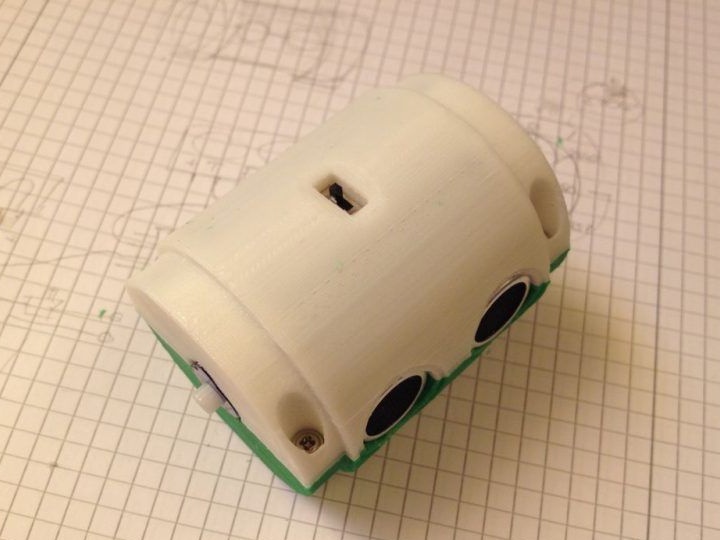
Đó là tất cả, bây giờ robot đã gần như sẵn sàng. Nó vẫn còn để cài đặt các bánh xe trên trục động cơ servo và bạn có thể bắt đầu thử nghiệm robot. Bạn có thể xem chi tiết hơn cách làm việc tự chế trên video.