

Video làm việc của robot
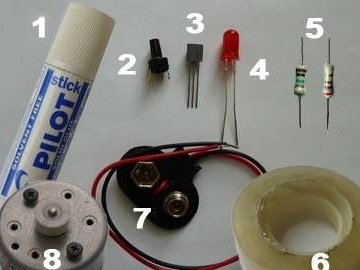
Vật liệu và công cụ để tạo robot:
- keo dính khô;
- băng keo trong suốt;
- Nút hai chân không cố định;
- một đèn LED nhấp nháy loại ARL-513URC-B;
- loại bóng bán dẫn KP505A;
- hai điện trở có giá trị danh nghĩa là 1M và 270 Ohms;
- đầu nối clip để kết nối với pin loại "Crown";
- mô hình động cơ RF-300CA-D / C 3V hoặc tương tự.

Chức năng và đặc điểm của robot:
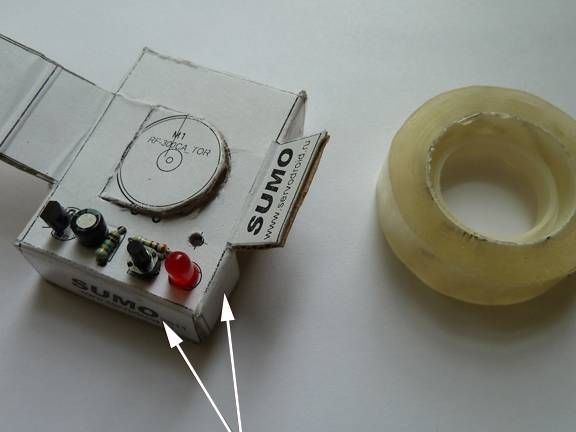
Trong ảnh bạn có thể thấy đã được lắp ráp người máy. Để di chuyển thiết bị, chỉ có một động cơ được sử dụng, nó được cài đặt theo chiều dọc, nhưng ở một góc nhất định. Khi di chuyển trong một đoạn ngắn, robot di chuyển theo một đường thẳng và tạo một vòng cung trên một phần dài hơn.
Một nút được sử dụng để bật robot, khi nhấn, robot sẽ bật trong 20 giây. Sau đó, tự động tắt máy và robot ở chế độ chờ cho đến lần kích hoạt tiếp theo.
Một tính năng khác của robot là nó tự động dừng ở rìa của vòng tròn. Việc hoàn thành điều kiện này là có thể nếu trọng lượng của đối thủ không nhỏ hơn trọng lượng của robot Robot và độ dày của vòng không nhỏ hơn 3 mm.
Ở đây, pin 9 Volt được sử dụng làm nguồn năng lượng, nó được gắn trên đầu robot. Nhờ trọng lượng bổ sung, robot tích lũy động năng cần thiết cho các hành động cần thiết.
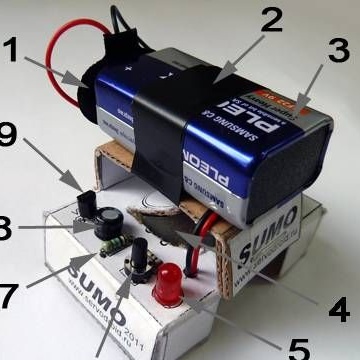
Trong ảnh, các thành phần robot được đánh dấu bằng số:
1. Clip để kết nối pin.
2. Chốt pin.
3. Nguồn điện (pin 9 V).
4. Động cơ.
5. Đèn LED nhấp nháy (cho biết nguồn được kết nối).
6. Nút bật robot.
7. Điện trở, nhờ có nó, bạn có thể đặt thời gian của robot.
8. Tụ điện, anh cũng chịu trách nhiệm về thời gian của robot.
9. Transitor loại KP505A, nó là một trình điều khiển động cơ.
Quy trình lắp ráp robot:
Bước đầu tiên. Chúng tôi làm cho trường hợp
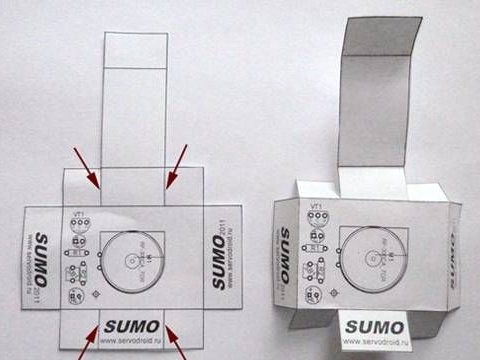
Để làm cho trường hợp, tác giả sử dụng một tấm bìa cứng, bạn cần phải áp dụng một đường viền cho nó theo mẫu. Các mẫu có thể được in trên một máy in, nó được đính kèm vào bài viết. Hơn nữa, sau khi thực hiện các nếp gấp cần thiết, mô hình có thể được cắt dọc theo các đường dày. Để cài đặt động cơ, bạn cần cắt một hình bán nguyệt trong bìa cứng, sau đó uốn cong nó một chút, như được chỉ ra trong ảnh.


Bước hai Lắp đặt các thành phần vô tuyến
Ở giai đoạn tiếp theo, bạn cần cài đặt tất cả các yếu tố radio cần thiết. Để làm điều này, bạn cần lấy một cái dùi và tạo các lỗ trên tấm bìa cứng, chúng cần được thực hiện bằng các dấu tròn. Để sửa các thành phần, sau khi cài đặt, kết luận của chúng cần được uốn cong nhẹ. Bạn cũng có thể nhìn thấy dấu hiệu dưới dạng một hình ảnh trên tấm bìa cứng, ở đây bạn cần tạo một lỗ lớn, một dây điện sẽ đi qua nó.
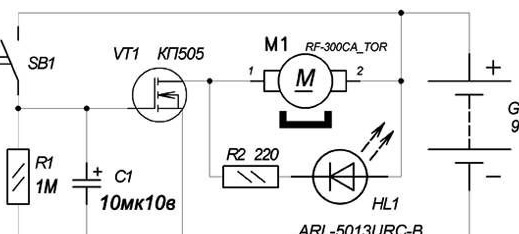
Sau đó, bạn có thể lấy một que hàn và bắt đầu kết nối các tiếp điểm của các thành phần vô tuyến theo sơ đồ.





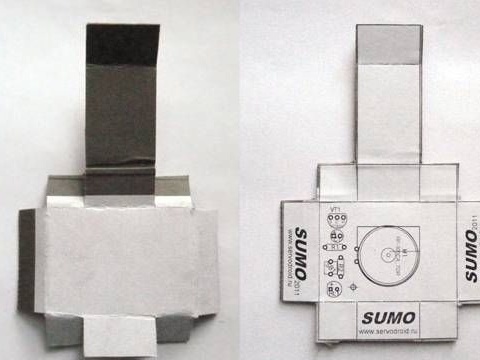
Bước ba Chúng tôi sửa chữa các bề mặt bên dưới
Ở giai đoạn này, các bề mặt phía dưới có thể được nối. Để làm điều này, bạn cần uốn cong các mặt phẳng thấp hơn và sau đó cố định chúng bằng băng keo trong suốt. Ngoài ra trong hình bạn có thể thấy các yếu tố của vỏ máy bị nghiêng lên, chúng cần thiết để sửa pin.


Bước bốn Kết nối thiết bị ngoại vi
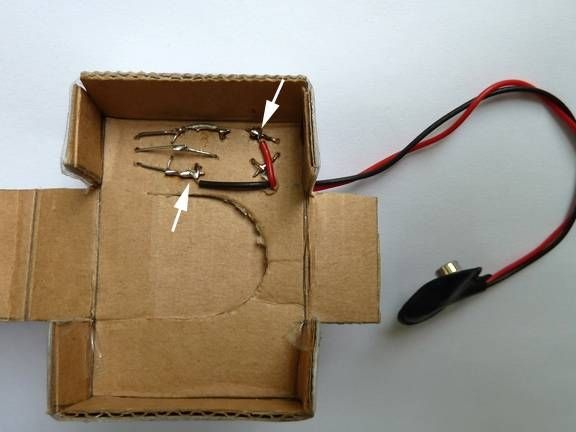
Để kết nối nguồn với pin, bạn cần sử dụng đầu nối clip. Dây cần được truyền qua lỗ, màu đỏ được hàn vào tiếp điểm dương của đèn LED và màu đen đến điểm trừ của tụ C1.
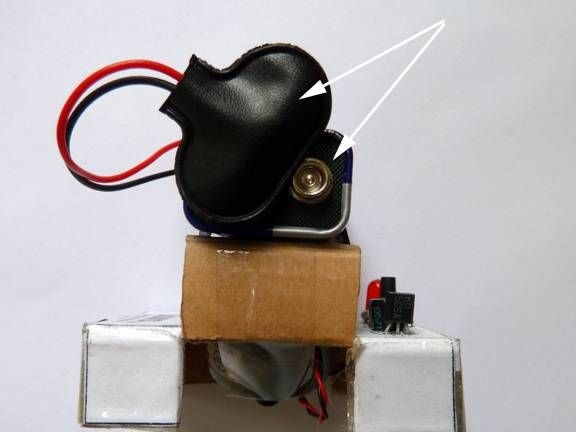
Sau đó, bạn cần kết nối các bề mặt bên trái và bên phải, kết quả là chữ "P" phải được lấy. Để cố định đáng tin cậy của các yếu tố, một khung từ máy dập ghim được sử dụng. Nơi để cài đặt dấu ngoặc được chỉ định bởi một mũi tên màu trắng. Kẹp có thể được kẹp bằng kìm.


Bước năm Cài đặt và kết nối động cơ
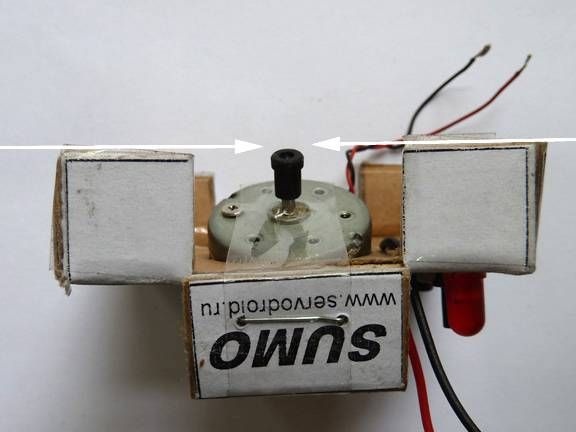
Để robot di chuyển thẳng, trục của nó phải ở một góc nhất định so với bề mặt. Nói cách khác, robot sẽ đứng ở các bộ phận bên và trục của nó sẽ chỉ tiếp xúc với bề mặt. Để trục robot có độ bám tốt, bạn cần đặt một dây chun lên nó, nó có thể là một cambric hoặc một miếng giữ cao su từ bút helium.
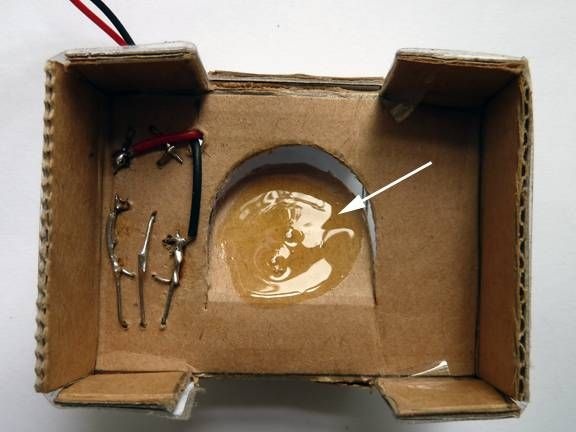
Động cơ được gắn trên keo, nơi bôi trơn được đánh dấu bằng một mũi tên màu trắng. Sau khi áp dụng keo, bạn cần đợi một chút để nó trở nên nhớt, nếu không keo lỏng có thể vào động cơ và làm hỏng nó.
Để cố định thêm, động cơ được bọc bằng băng keo.


Đối với góc của robot, thì tất cả điều này có thể thấy rõ trong các bức ảnh. Sau khi cài đặt, động cơ cần phải được kết nối. Một chân được kết nối với điểm trừ và chân còn lại với cống của bóng bán dẫn VT1.


Bước sáu Giai đoạn cuối cùng của lắp ráp
Pin được gắn trên khung hình chữ U, pin được cố định bằng băng keo điện. Khung được nghĩ theo cách mà ngoài việc hỗ trợ, nó còn là một bộ giảm xóc cho pin. Nếu robot cần được ngắt hoàn toàn khỏi nguồn điện, bạn có thể ngắt kết nối một dây ra khỏi pin.
Vâng, kết luận, đối với cuộc thi, bạn sẽ cần một chiếc nhẫn, nó được làm hai lớp, với độ dày ít nhất là 3 mm. Nếu điều kiện này không được đáp ứng, robot sẽ không thể dừng lại ở rìa của vòng tròn. Đường kính của vòng nên là 250 mm. Lớp dưới bao gồm một tấm bìa mỏng và lớp trên bằng bìa cứng màu đen. Cả hai lớp cần phải được dán lại với nhau. Việc lắp ráp kết thúc, bạn có thể bắt đầu cuộc thi. Người chiến thắng là robot vẫn còn trong vòng.