


Vì vậy, lấy lego kỹ thuật từ con trai tôi, và ở nhà Arduino Nano bắt đầu kết hợp những nhà thiết kế này.
Chúng tôi sẽ cần:
- Lego Technic (bộ dụng cụ 42029 và 42033)
- Arduino Nano (liên kết đến bảng)
- DRV 8833
- 2 ổ servo SG-90
- Máy thu hồng ngoại
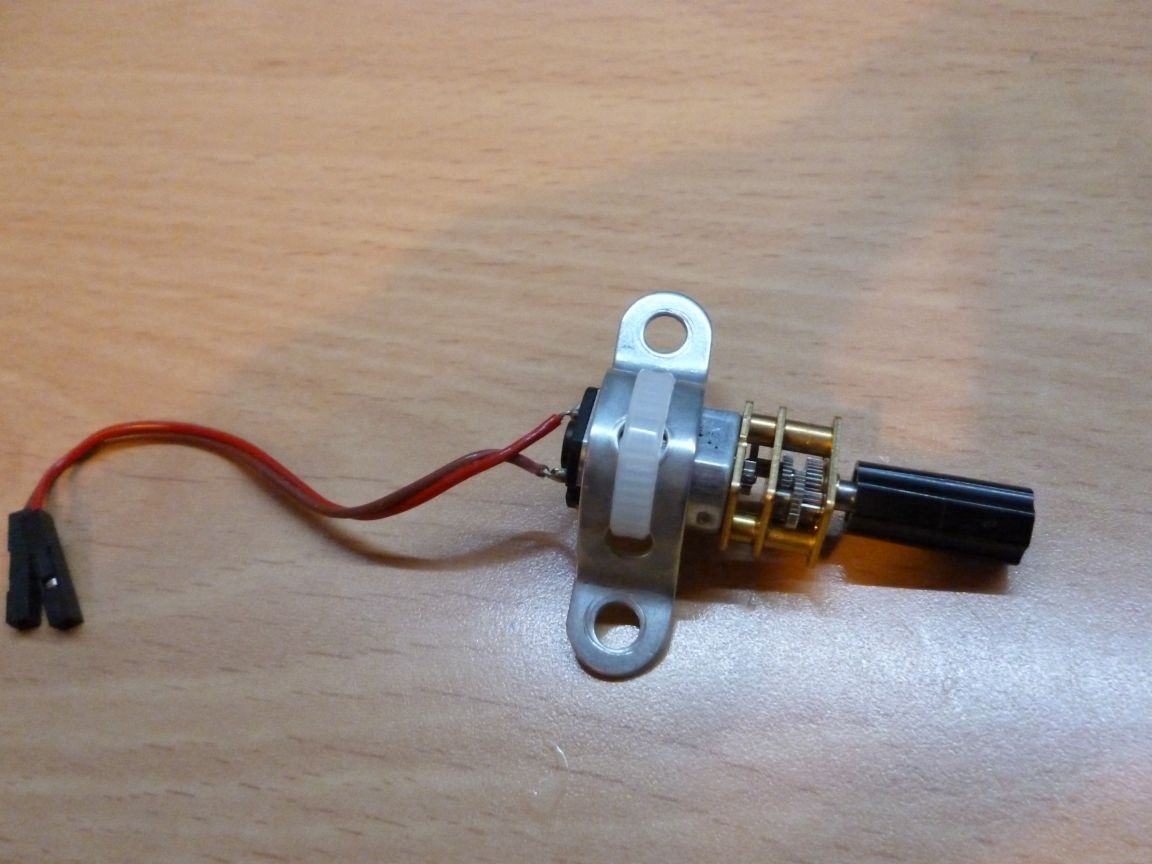
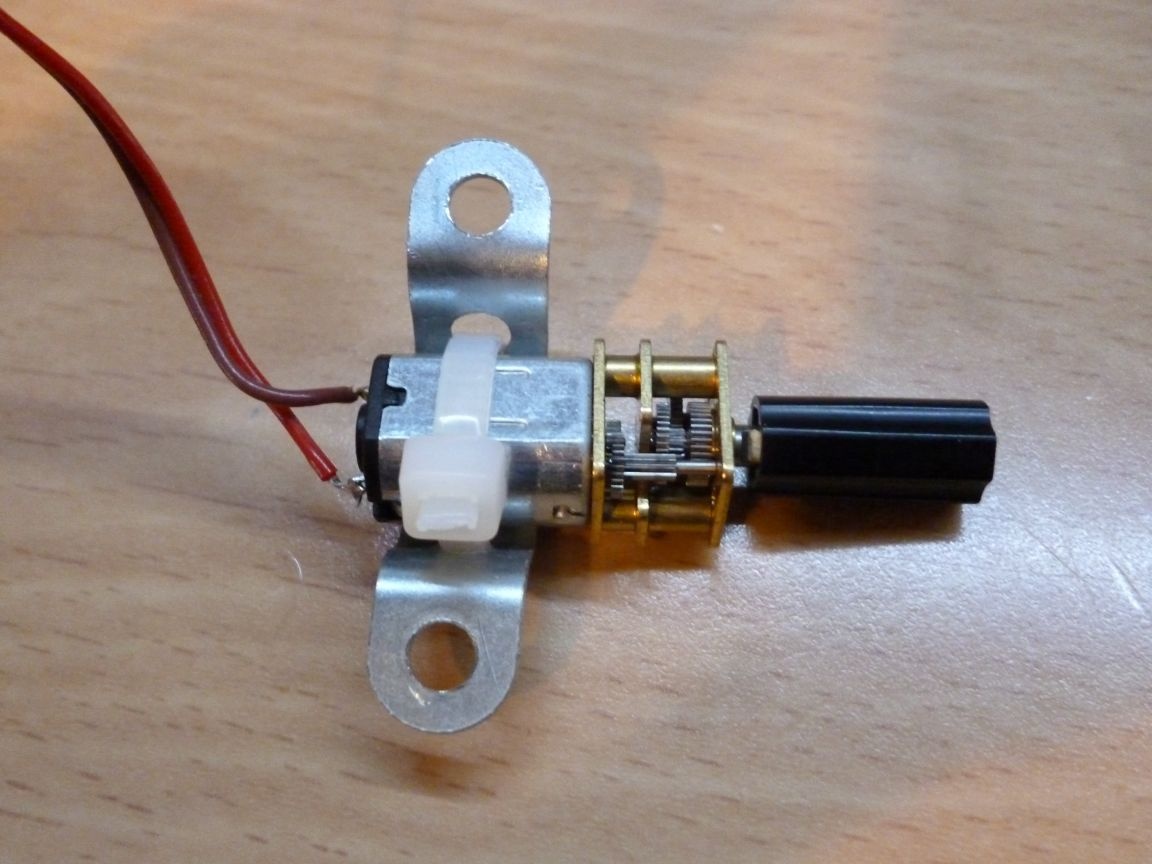
- động cơ bánh răng
- 2 đèn LED
- 2 điện trở 150 ohms
- Tụ 10v 1000uF
- 2 lược chải đơn PLS-40
- 2 đầu nối PBS-20
- Cuộn cảm 68mkGn
- 4 pin NI-Mn 1.2v 1000mA
- Nối cha-mẹ hai pin vào dây
- Homutik
- Dây điện có màu khác nhau.
- hàn
- Rosin
- hàn sắt
- Bu lông 3x40 và các loại hạt và vòng đệm cho chúng
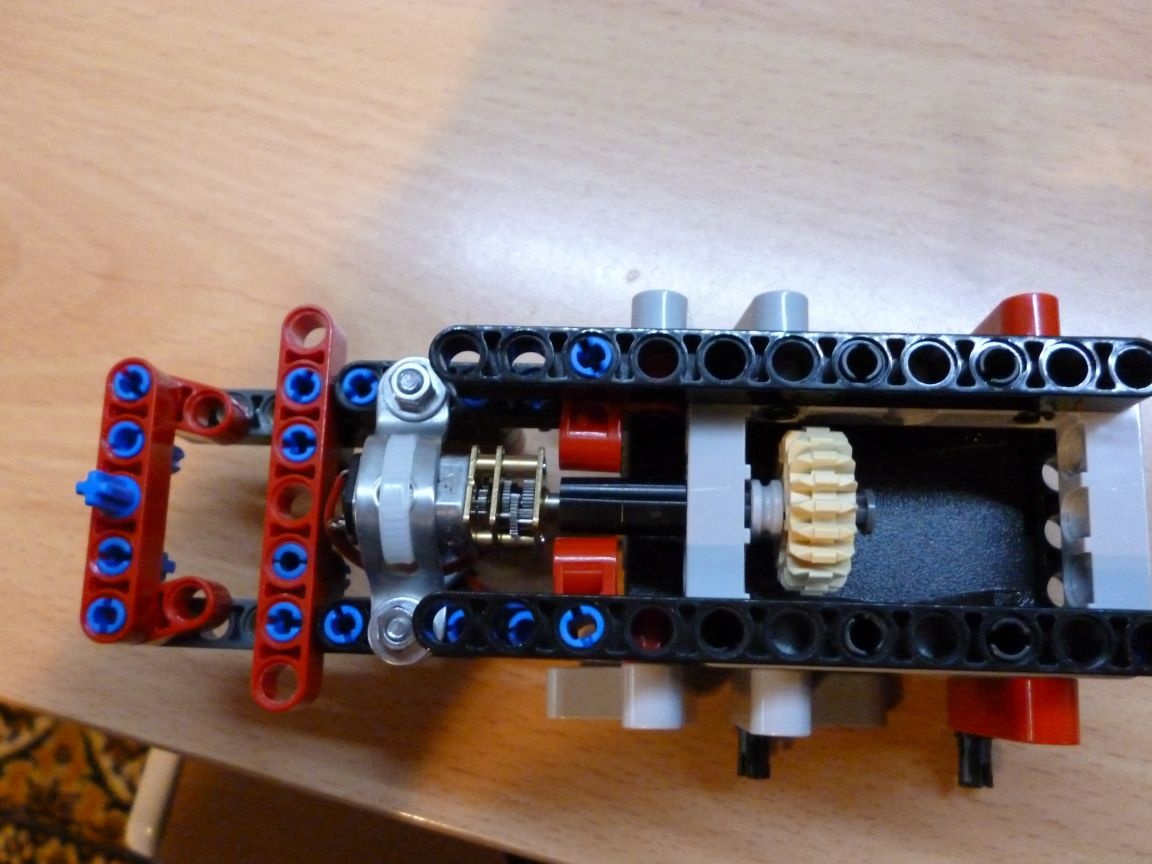
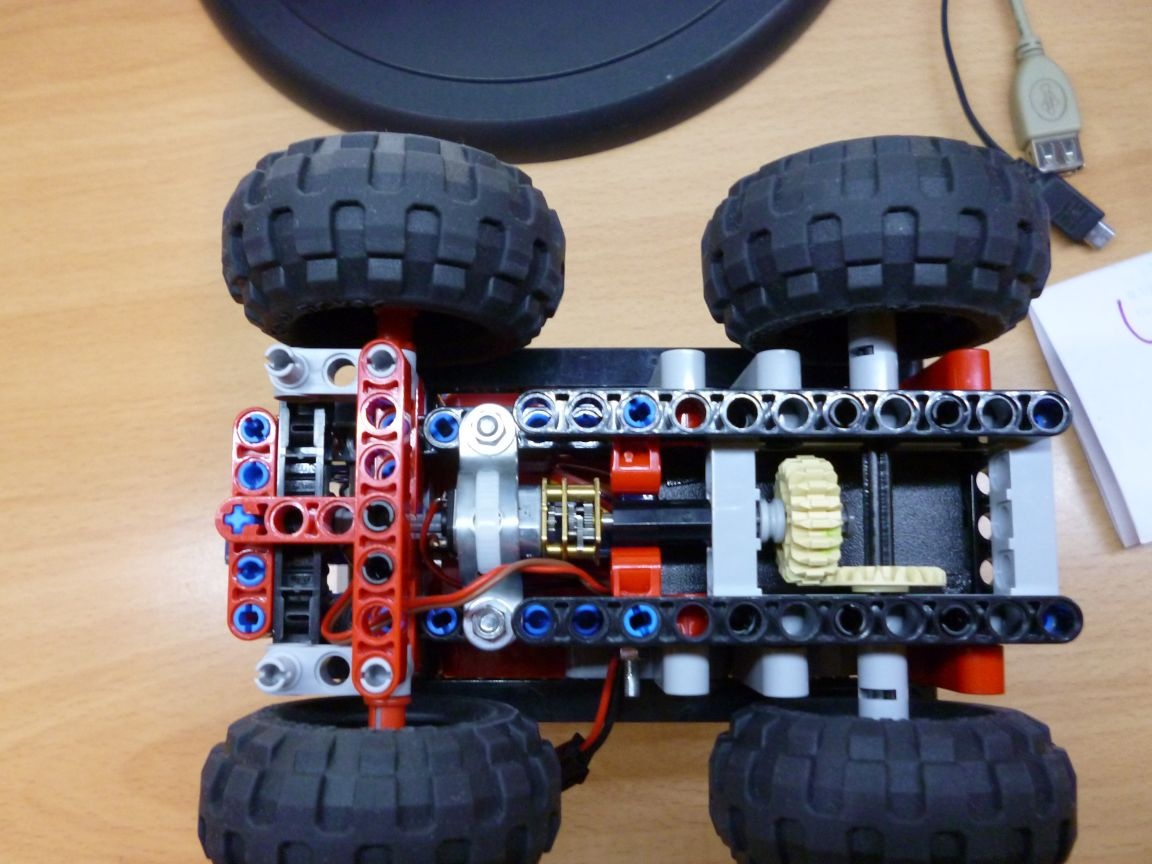
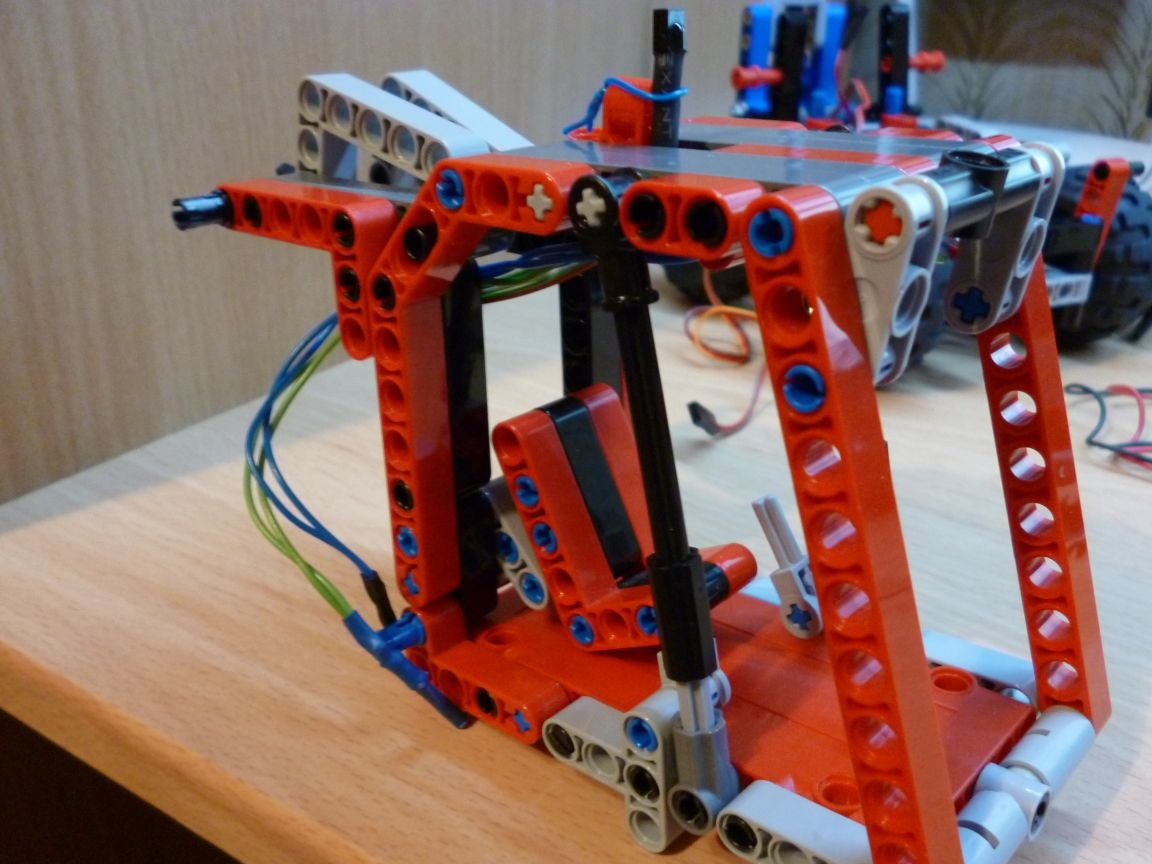
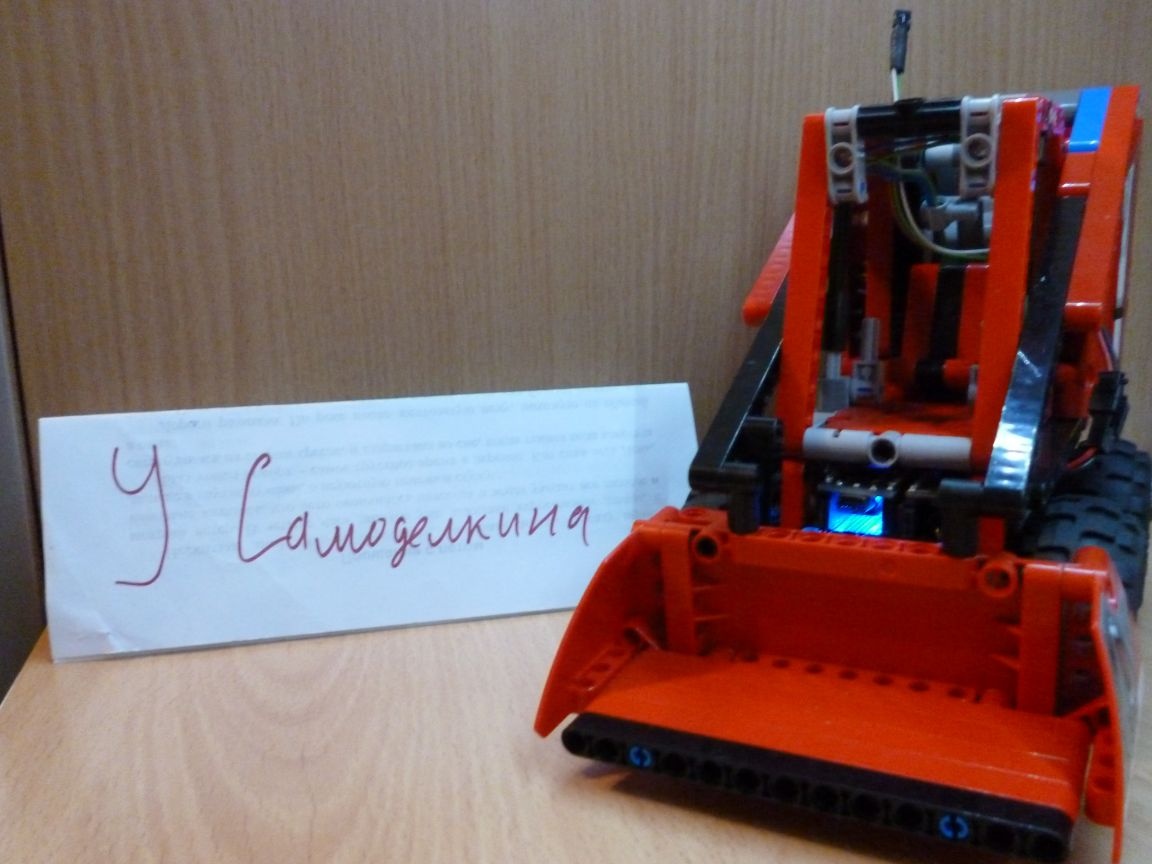
Bước 1 lắp ráp khung và ổ trục.
Bạn có thể lắp ráp bất kỳ khung gầm nào từ Technic, dù sao, nó hóa ra như thế này.
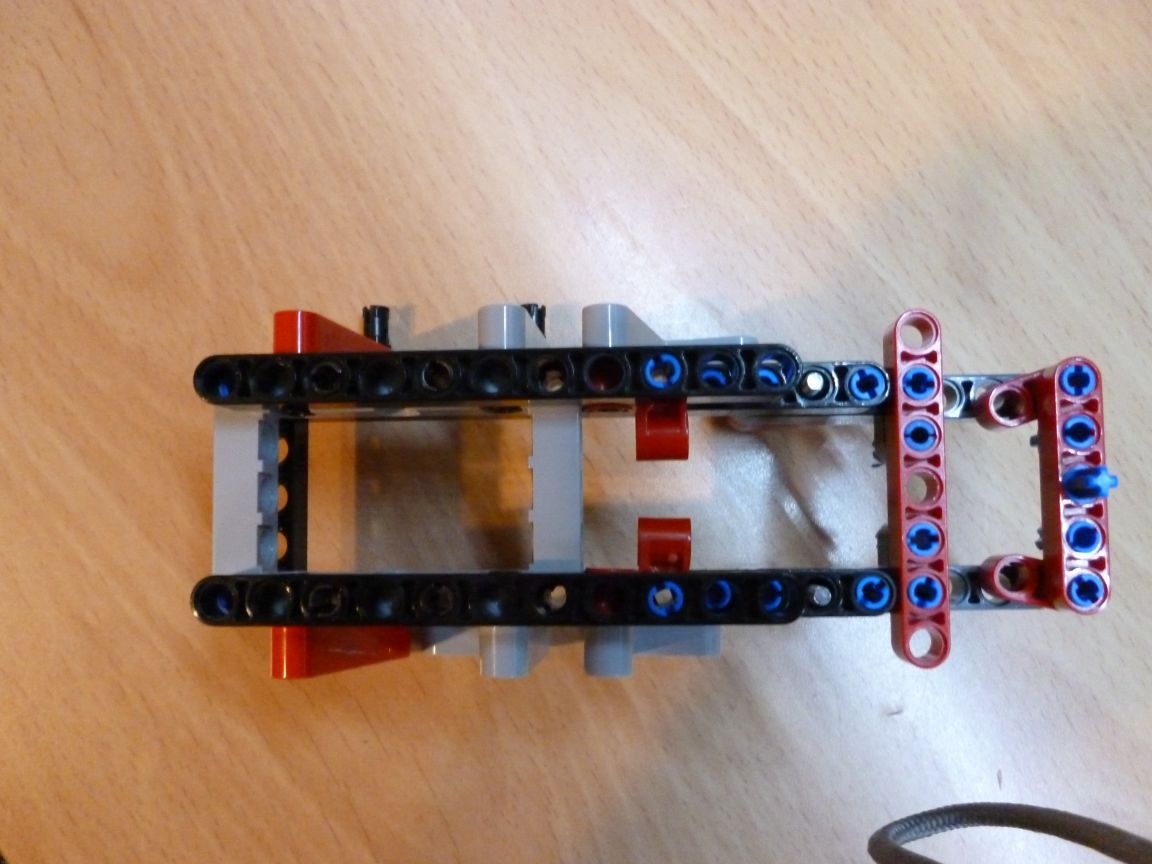
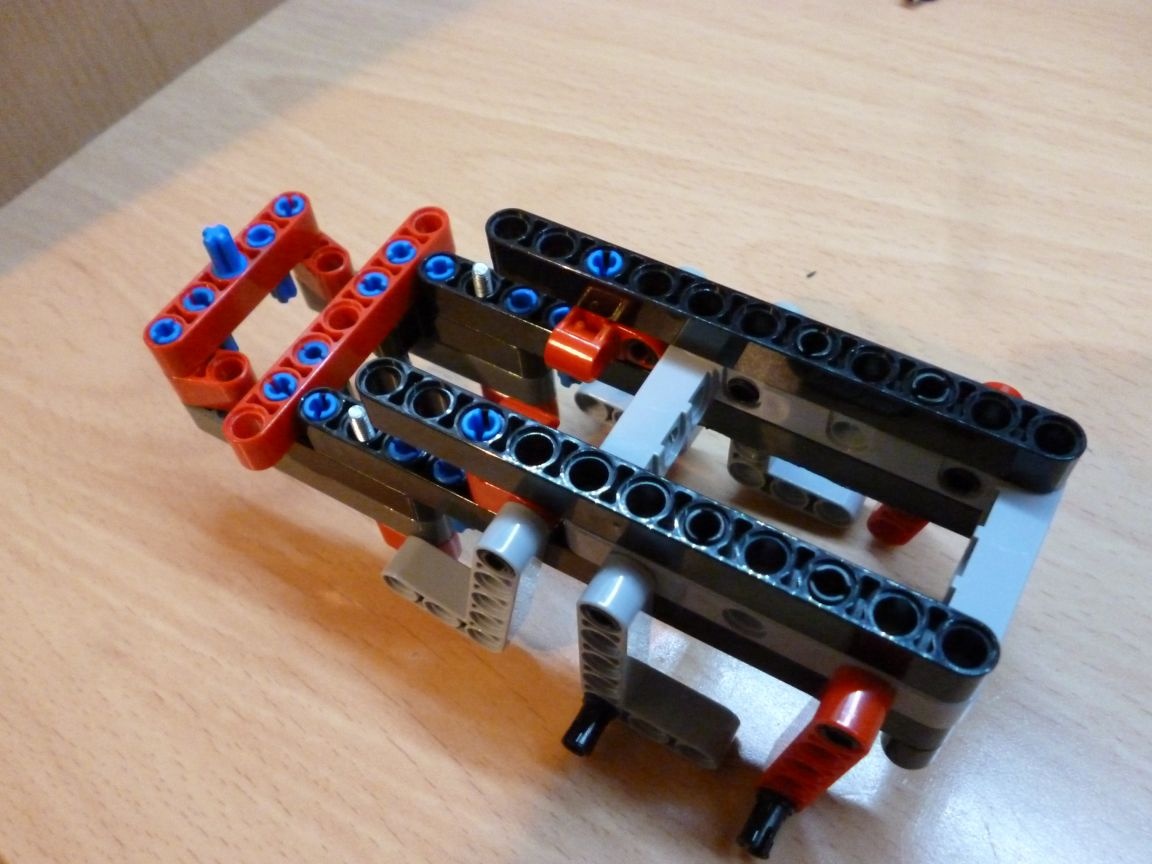
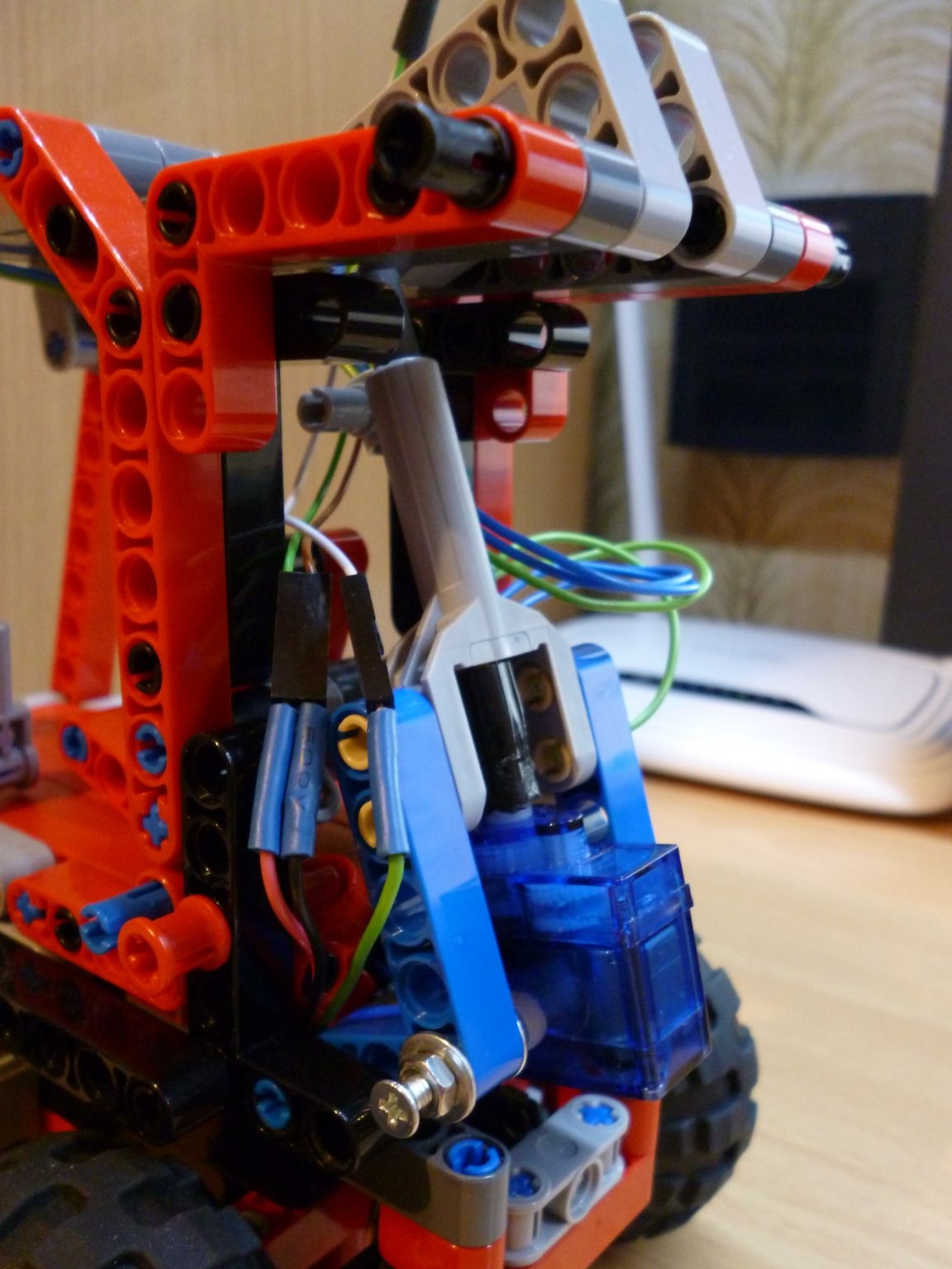
Chỉ có vấn đề kết nối động cơ bánh răng với các bộ phận của nhà thiết kế. Tôi đã quyết định điều này như sau: đặt trên trục của bánh răng một ống nối và chèn một mẩu phù hợp để cố định. Để gắn động cơ bánh răng sử dụng nhựa kim loại từ một nhà thiết kế sắt và kẹp. Hóa ra như sau:
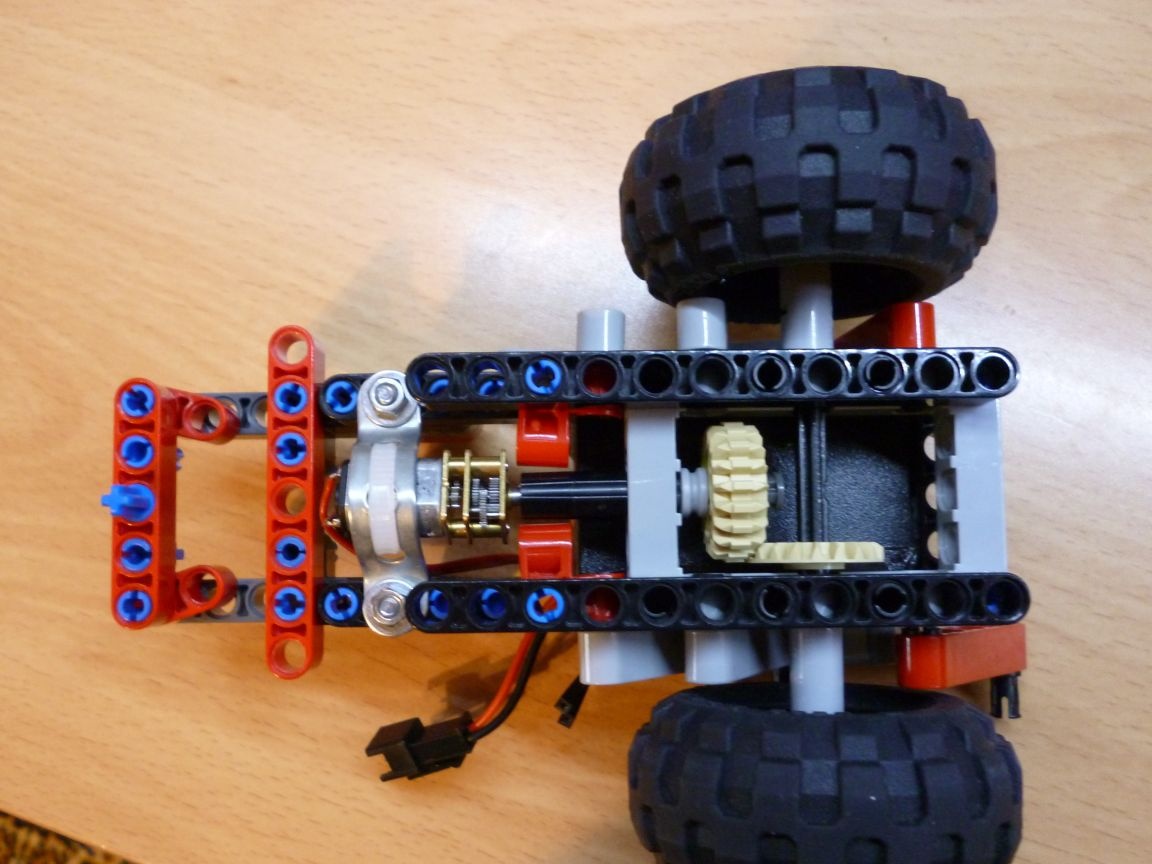
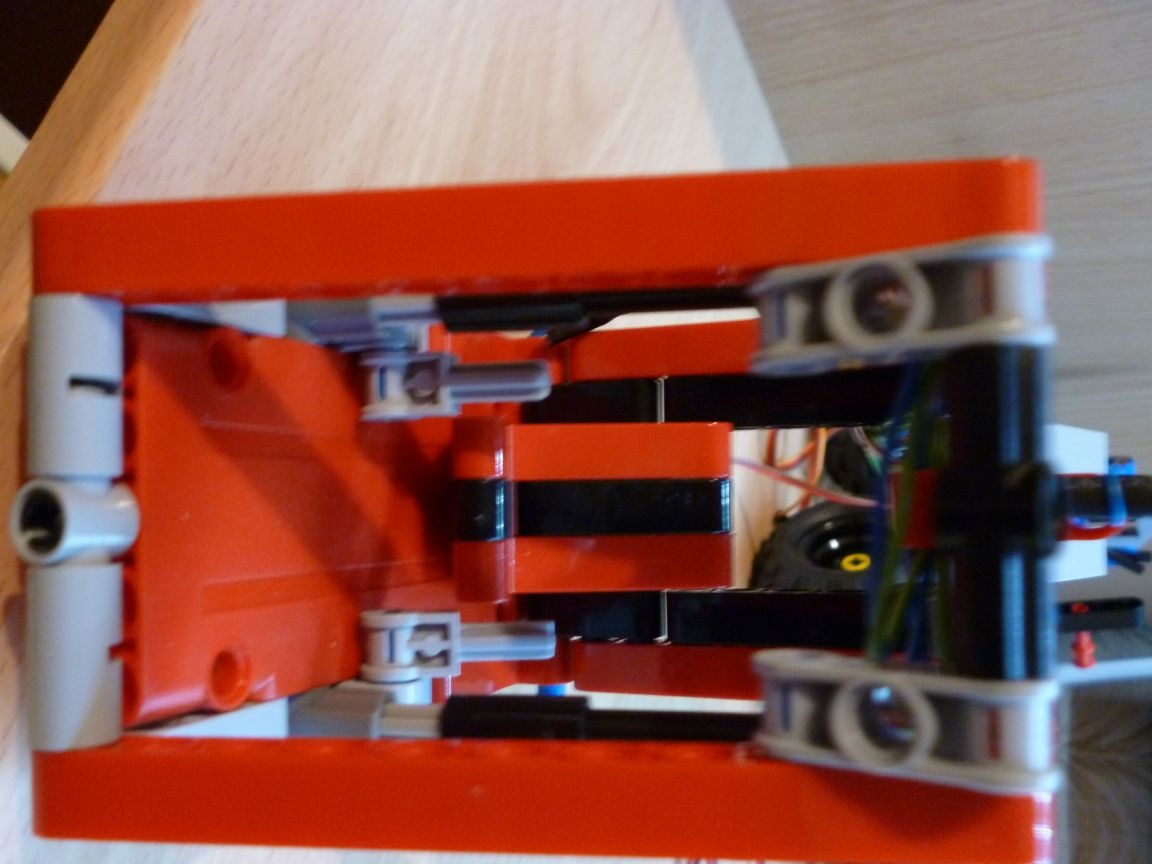
Tiếp theo, chúng tôi cài đặt thiết kế kết quả trên khung bằng cách sử dụng bu lông 3x40:
Và đặt trên các bánh xe:
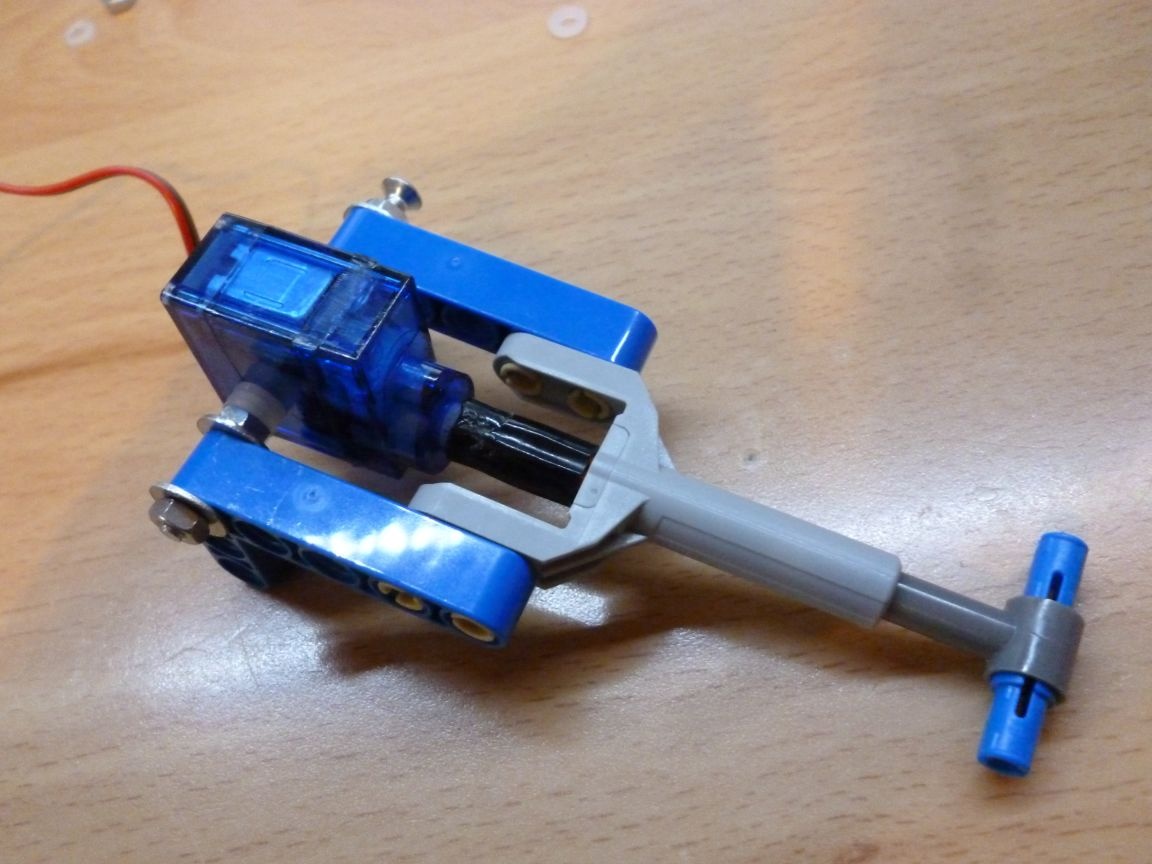
Bước 2 bánh xe xoay
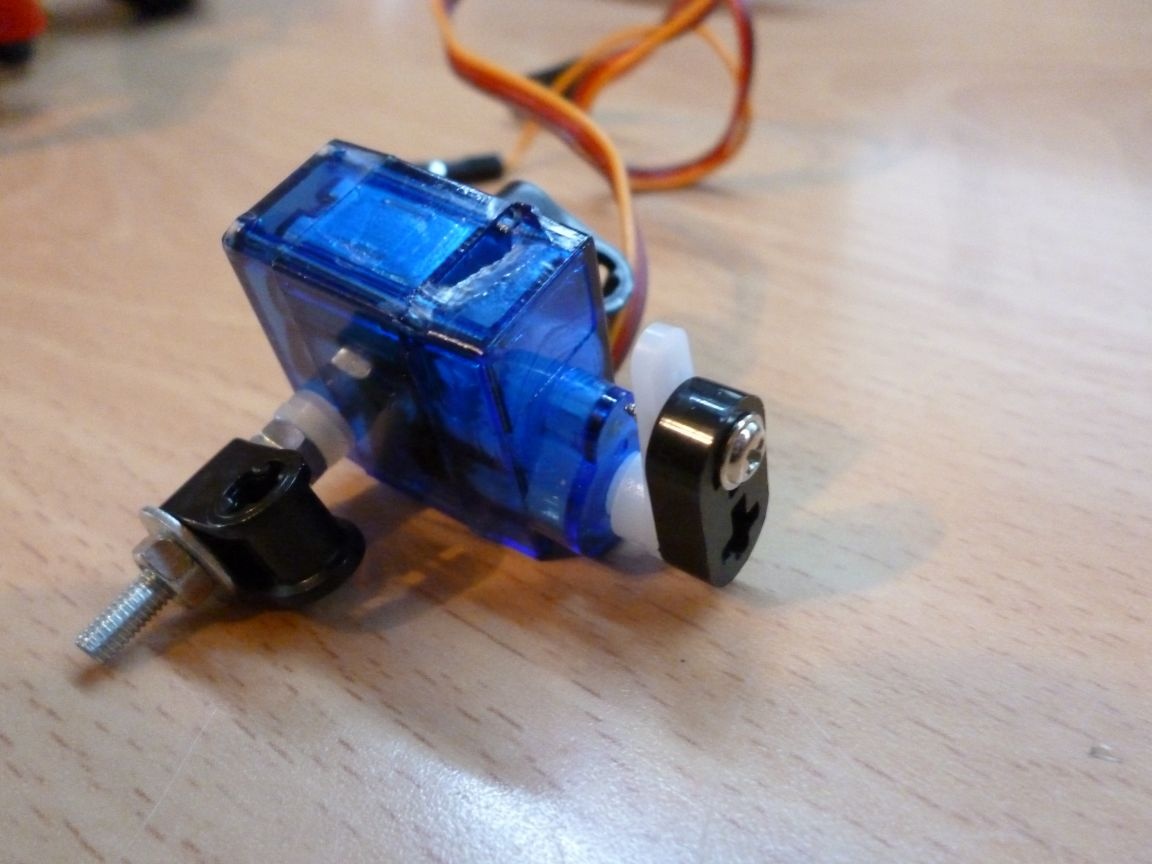
Để thực hiện vòng quay, hãy lấy servo SG-90. Cần phải khoan cẩn thận, để không chạm vào các bộ phận bên trong, một lỗ xuyên qua có đường kính 3,2 mm hoặc chỉ cần cắt bằng dao văn phòng phẩm.

Chúng tôi chèn một bu lông vào lỗ được tạo ra, và các góc dọc theo các cạnh và cố định bằng đai ốc:

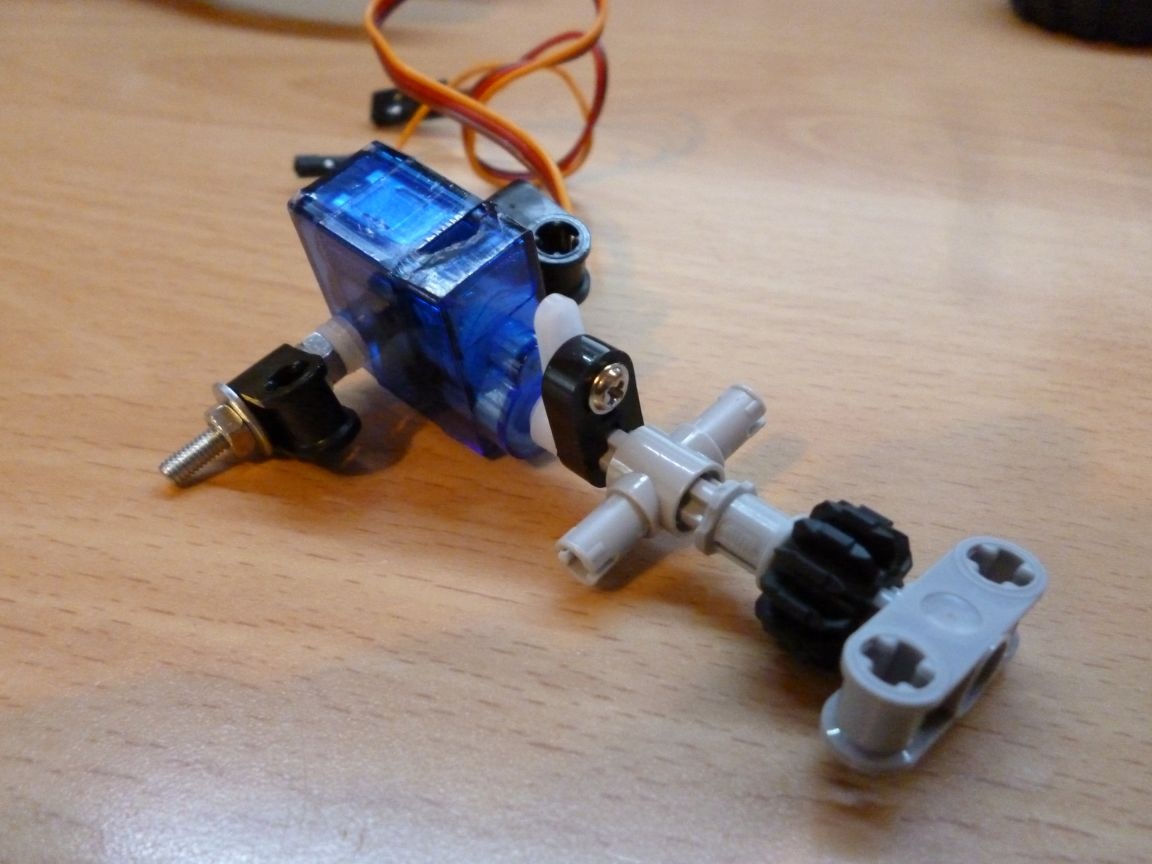
Trên trục servo, chúng tôi đặt một đòn bẩy với bộ phận bắt vít từ lego:
Và cuối cùng là lắp ráp xoay:
Chúng tôi đặt trên khung xe:

Đặt trên các bánh xe:
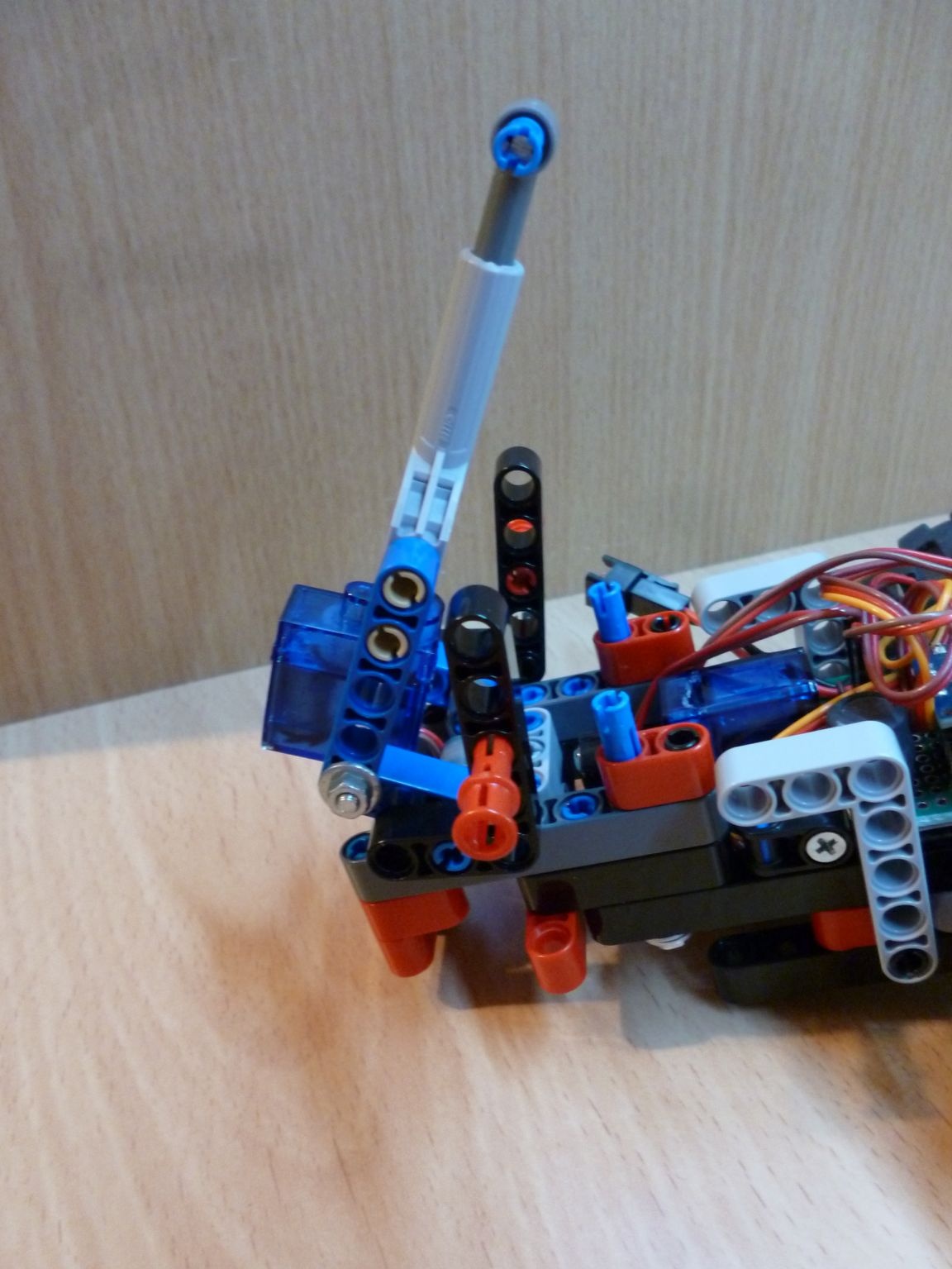
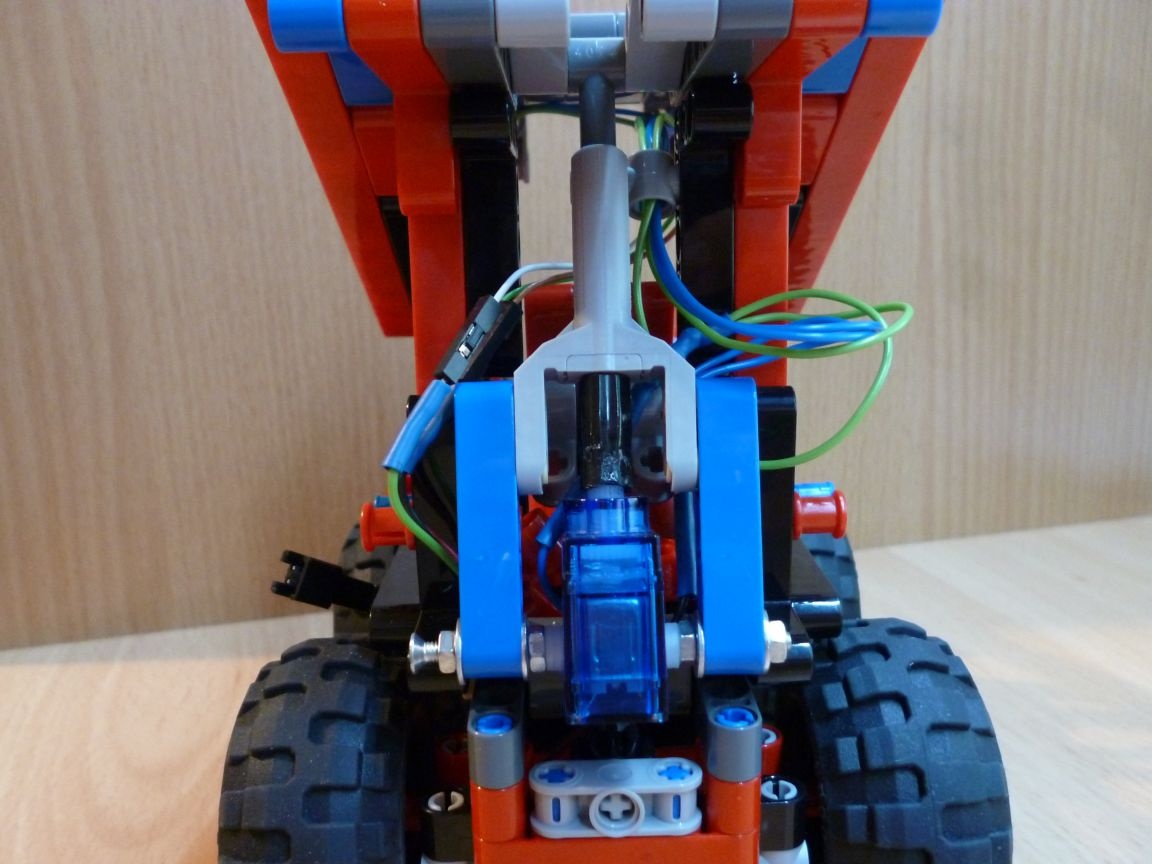
Bước 3 thiết bị nâng.
Để nâng thùng lấy một servo SG-90 đã được sửa đổi. Toàn bộ điểm sửa đổi của nó là loại bỏ bộ điều khiển bên trong và hàn dây trực tiếp vào động cơ để tạo ra một động cơ bánh răng ra khỏi ổ servo, nghĩa là nó có thể quay hoàn toàn. Cũng như trong servo đầu tiên, bạn cần tạo một lỗ xuyên qua để lắp:
Cài đặt trên khung máy:
Bước 4 taxi.
Cần phải lắp ráp một chiếc taxi từ lego technic từ các bức ảnh:

Bước 5 là một thợ điện.
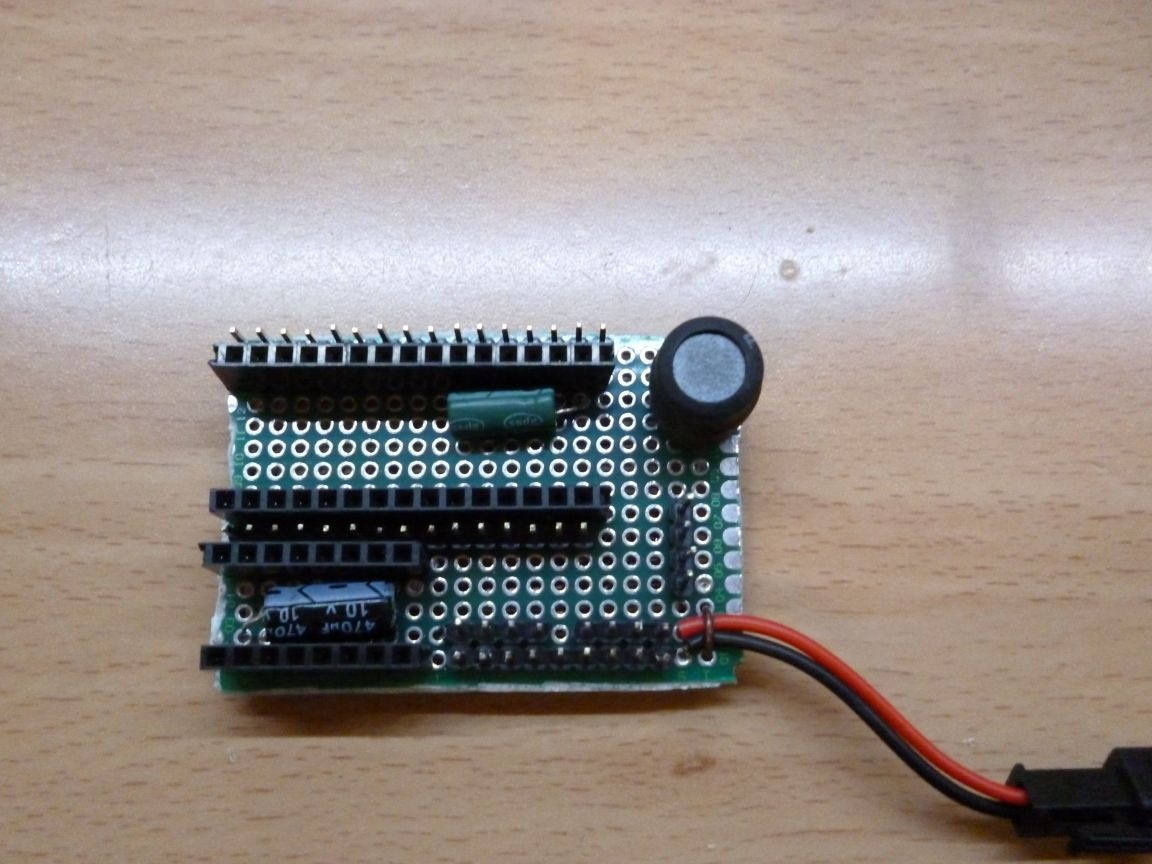
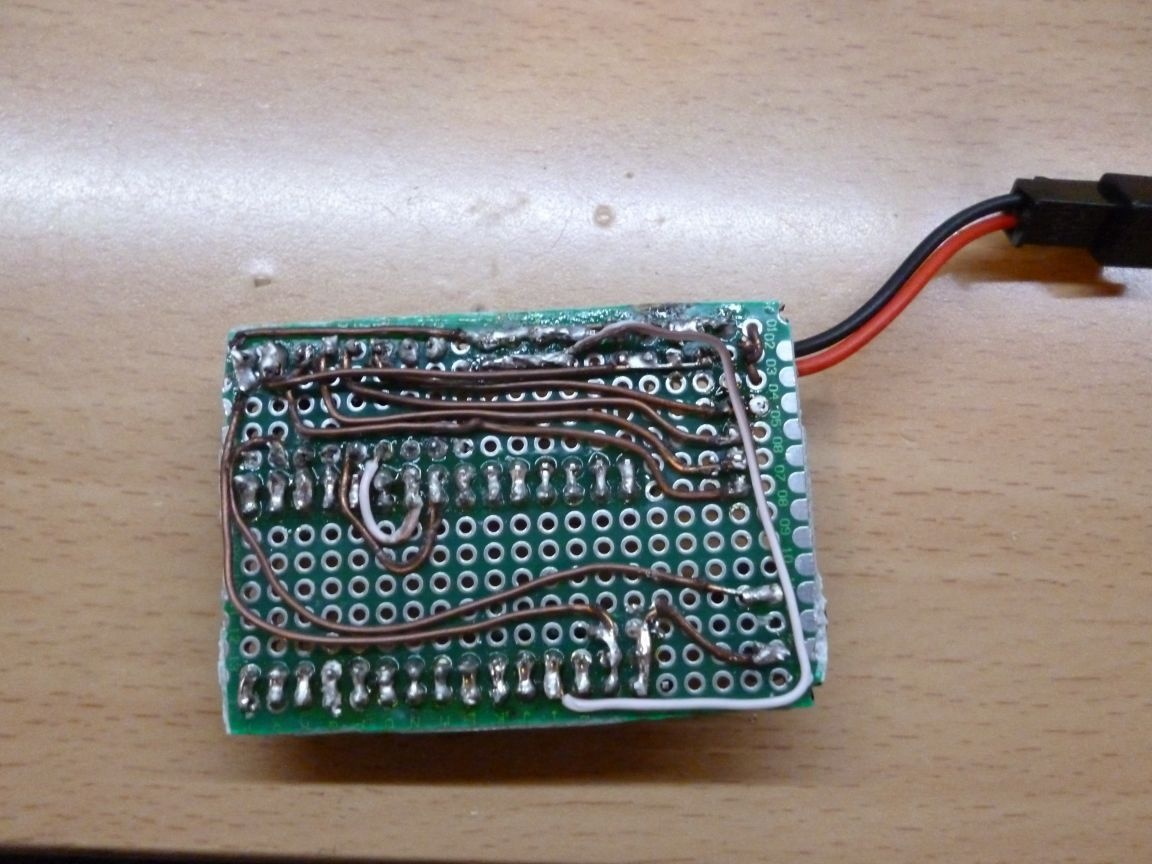
Ở đây bạn phải có một hàn sắt. Để thuận tiện, bạn cần hàn mọi thứ trên bảng mạch theo sơ đồ sau:
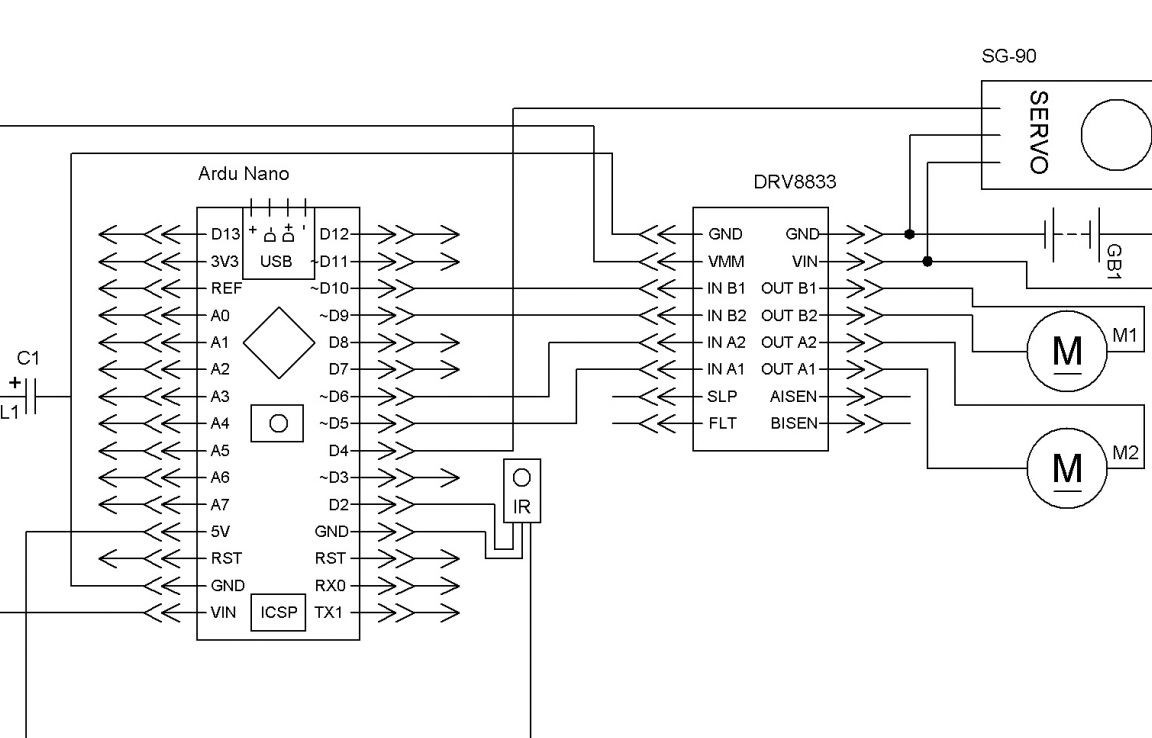
Tôi nghĩ rằng nó đáng để giải thích một chút: bất kỳ tụ điện công suất thấp nào cũng có thể được tìm thấy, một cuộn cảm thuộc bất kỳ loại nào cũng có thể được tìm thấy, điều này là cần thiết để ổn định điện áp vi điều khiển. Các điện trở cần phải được chọn cho các đèn LED được sử dụng. Tôi lấy một máy thu IR từ một món đồ chơi cũ, nhưng bạn có thể mua nó ở cửa hàng radio. Nếu có nhiễu mạnh, thêm một tụ điện vào mạch công suất máy thu IR.
Tôi đã nhận được điều này:
Chúng tôi cài đặt Arduino Nano và DRV 8833 ở vị trí của chúng:
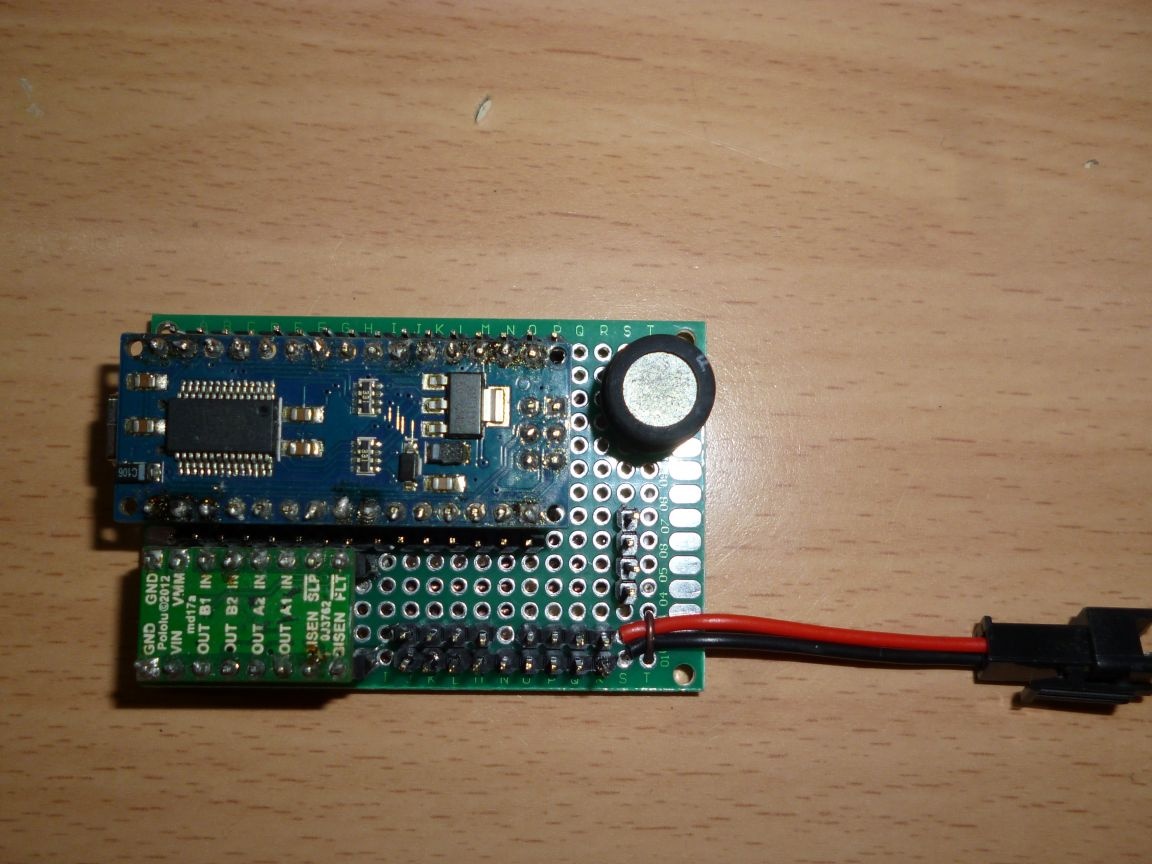
Và bây giờ chúng tôi đặt bảng lên khung máy (loại bỏ các bánh xe cho thuận tiện):
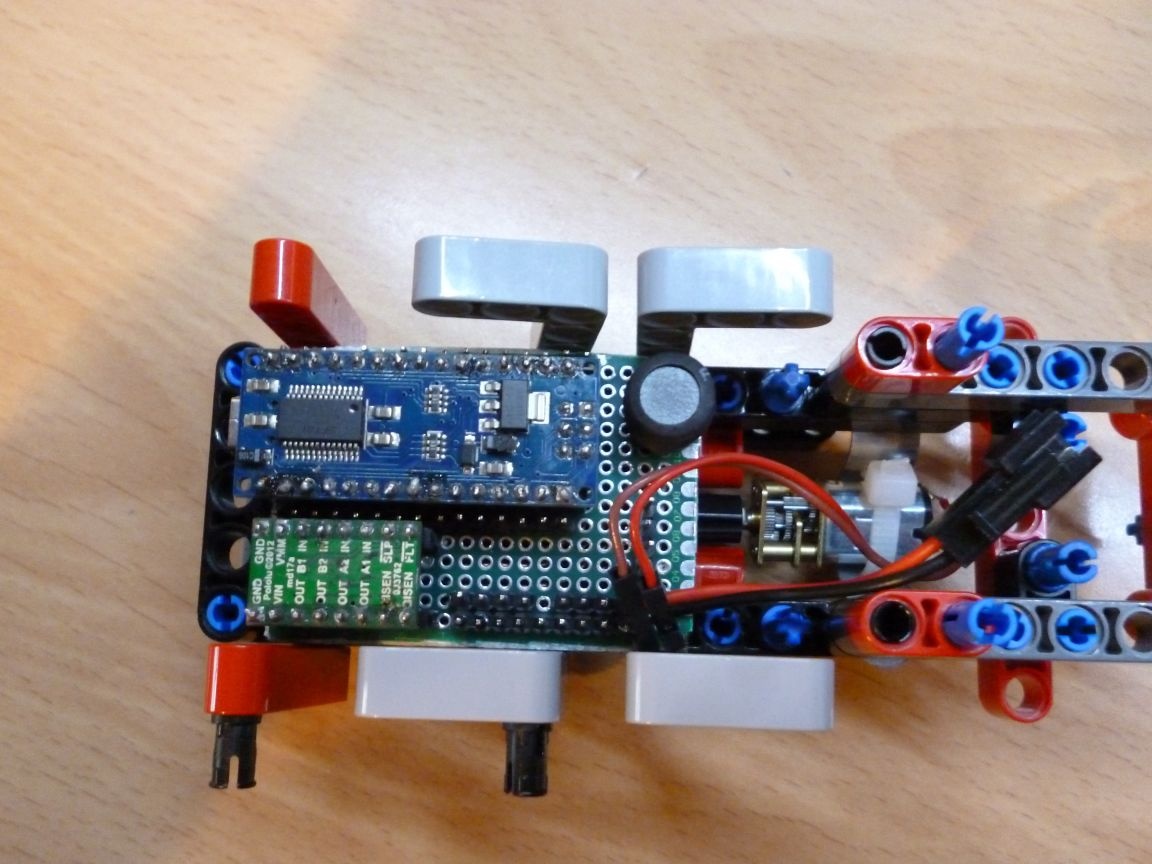
Đối với nguồn điện, tôi đã sử dụng 4 pin Ni-Mn 1.2v 1000mA được kết nối nối tiếp và quấn bằng băng keo điện. Tôi dán chúng vào băng keo hai mặt dưới nắp ca-pô phía sau.
Bước 6 lắp đặt taxi.
Chúng tôi kết nối máy thu hồng ngoại, động cơ và điốt theo sơ đồ, đặt cabin lên trên khung, sửa thùng (có thể thực hiện bất kỳ thùng nào):

Bước 7 firmware.
Tôi đang lập trình trong một IDE Arduino. Trước tiên, bạn cần điền vào phần sụn của tôi và thông qua thiết bị đầu cuối xem mã điều khiển từ xa mà bạn sẽ sử dụng. Bạn có thể lấy bất kỳ điều khiển từ xa IR nào, ví dụ, từ TV hoặc đầu DVD. Bằng cách nhấp vào một nút trong thiết bị đầu cuối, chúng ta sẽ thấy mã của nút được nhấn, viết nó xuống một tờ giấy. Chúng tôi làm điều này với tất cả các nút mà chúng tôi muốn lập trình các hành động của trình tải. Tiếp theo, chỉnh sửa bản phác thảo. Chúng tôi viết ra các mã chúng tôi đã ghi lại cho các hành động cần thiết vào nó và flash lại.
Chương trình cơ sở
Trình tải video: