Hôm nay tôi muốn chia sẻ tiếp theo của tôi tự làm. Nó dựa trên Lego và Arduino. Để điều khiển, chúng tôi sẽ sử dụng điều khiển từ xa với bộ phát 433 MHz. Lần này tôi muốn thực hiện một cuộc đua một chiếc xe hơi. Tiến hành:
- Kỹ thuật Lego 42022
- Arduino Nano
- DRV 8833
- Servo SG-90
- Module truyền thông vô tuyến 433 MHz
- Động cơ giảm tốc 200 vòng / phút, với đường kính trục 3 mm
- 2 đèn LED
- 2 điện trở 150 ohms
- Tụ 10v 1000uF
- 2 lược chải đơn PLS-40
- 2 đầu nối PBS-20
- Cuộn cảm 68mkGn
- 6 pin NI-Mn 1.2v 1000mA
- Nối cha-mẹ hai pin vào dây
- Homutik
- Dây điện có màu khác nhau.
- hàn
- Rosin
- hàn sắt
- Bu lông 3x40 và các loại hạt và vòng đệm cho chúng
- Bu lông 3x20
Bước 1 lắp ráp vỏ máy.
Cần phải lắp ráp máy của chúng tôi theo hướng dẫn Lego 42022 tùy chọn thứ hai với một số tinh chỉnh. Chúng tôi thực hiện tất cả các hành động từ trang 3 đến 6. Chúng tôi không cần một cơ chế bánh răng. Động cơ Lego cũng không cần phải lắp ráp. Tuy nhiên, bạn sẽ cần các giá treo động cơ được thu thập ở các trang 14-19, ngoại trừ các bánh răng và trục. Tiếp theo, chúng tôi thu thập mọi thứ từ trang 20 đến 74, ngoại trừ đòn bẩy ở trang 25.
Bước 2 cơ giới hóa cơ thể.
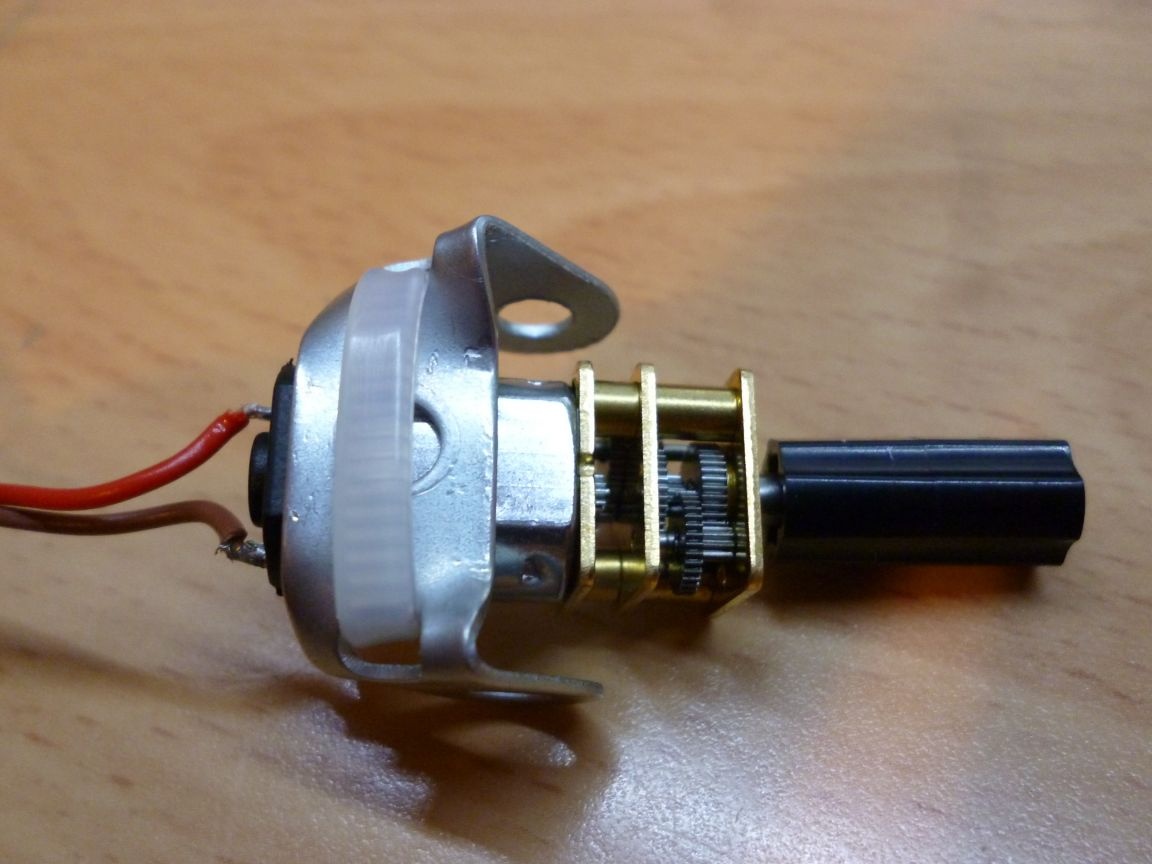
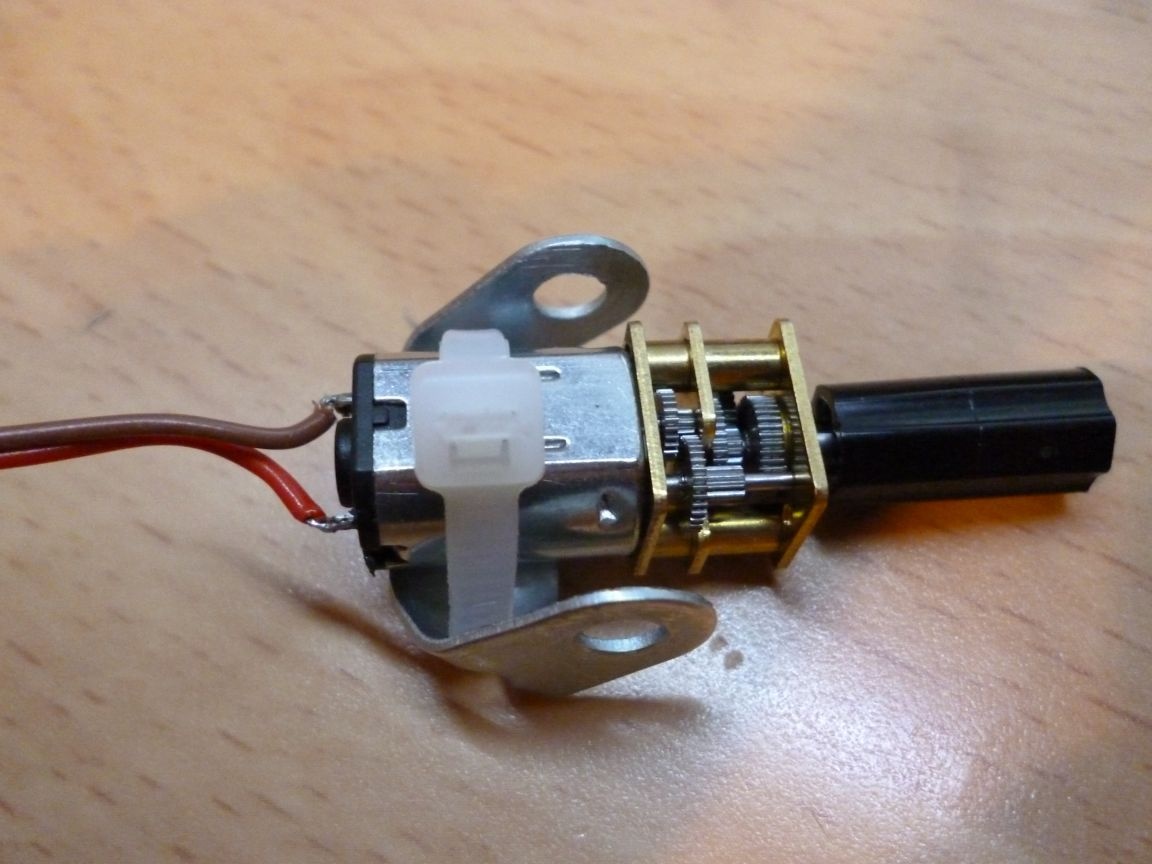
Đặt trong chuyển động của chúng tôi mô hình sẽ có một động cơ bánh răng với tốc độ 200 vòng / phút. Có thể được sử dụng với một tỷ lệ thiết bị khác nhau. Nhưng, theo tôi, đây là lựa chọn tốt nhất. Ở tốc độ 100 vòng / phút - quá chậm, 300 vòng / phút - không đủ năng lượng và động cơ rất nóng. Trên trục của bánh răng, đặt tay áo kết nối của Leg Legayaaya và bảo vệ nó khỏi xoắn trận đấu với một đường viền. Để cố định động cơ của chúng tôi trên mô hình, cần phải uốn cong bộ phận từ công cụ xây dựng bằng kim loại bằng chữ cái Chữ P P và gắn động cơ bánh răng vào tấm bằng kẹp. Kết quả phải như sau:
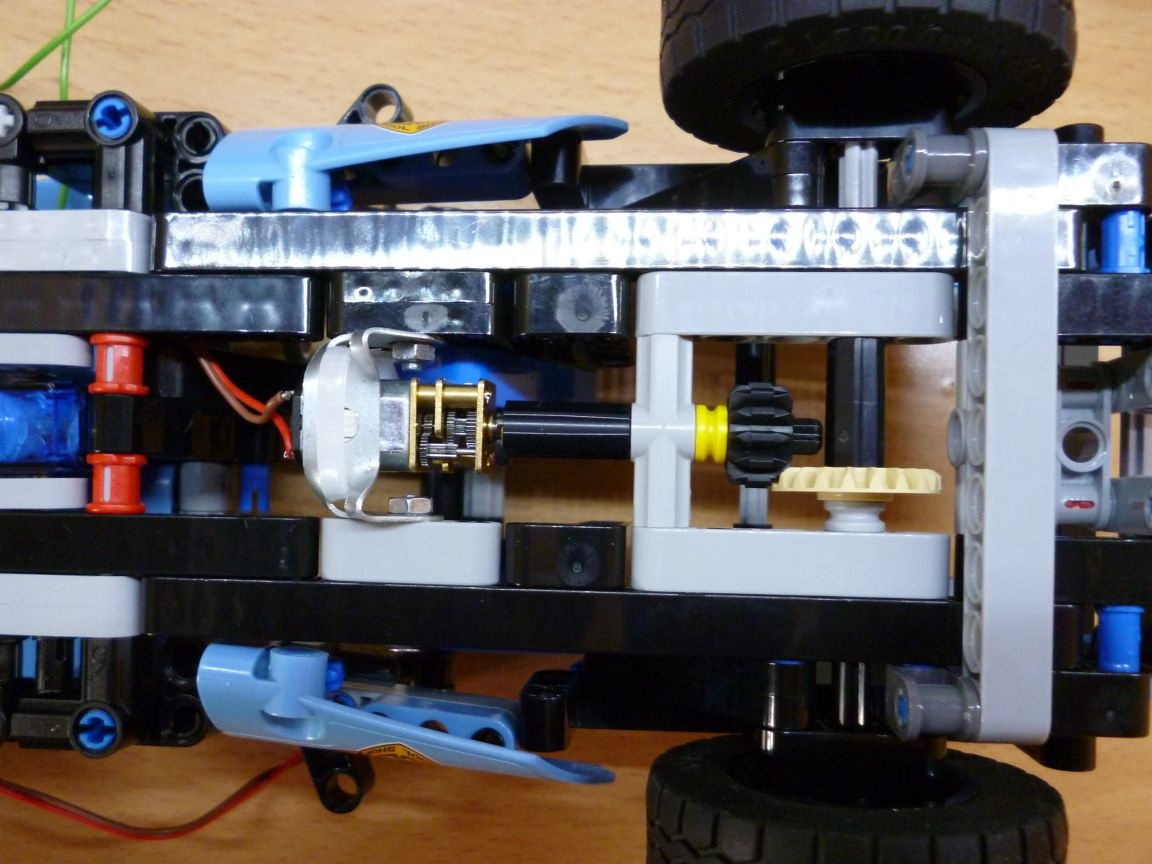
Với sự giúp đỡ của bu lông 3x20, chúng tôi gắn chặt mô-tơ của mình vào mô hình. Đừng thắt chặt quá nhiều! Nếu không, bạn có thể làm hỏng các bộ phận xây dựng Lego. Trên mô hình, nó trông như thế này:
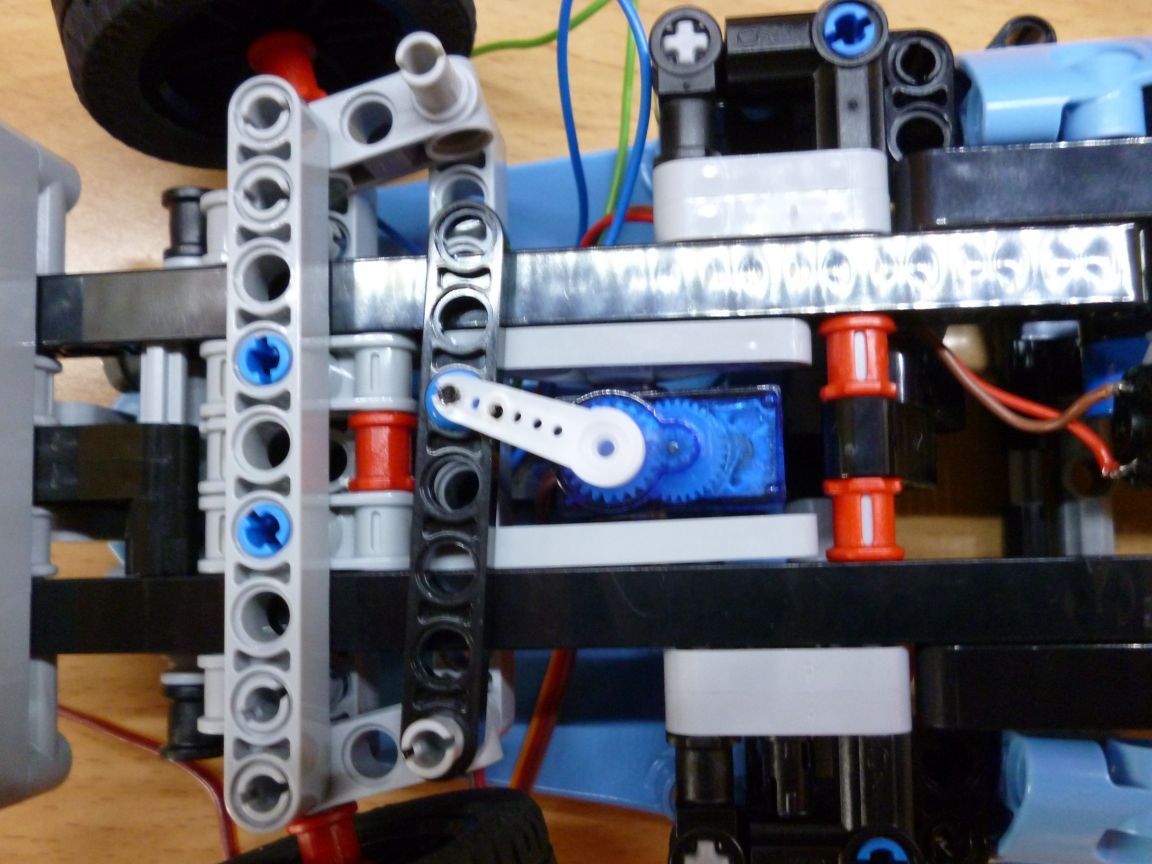
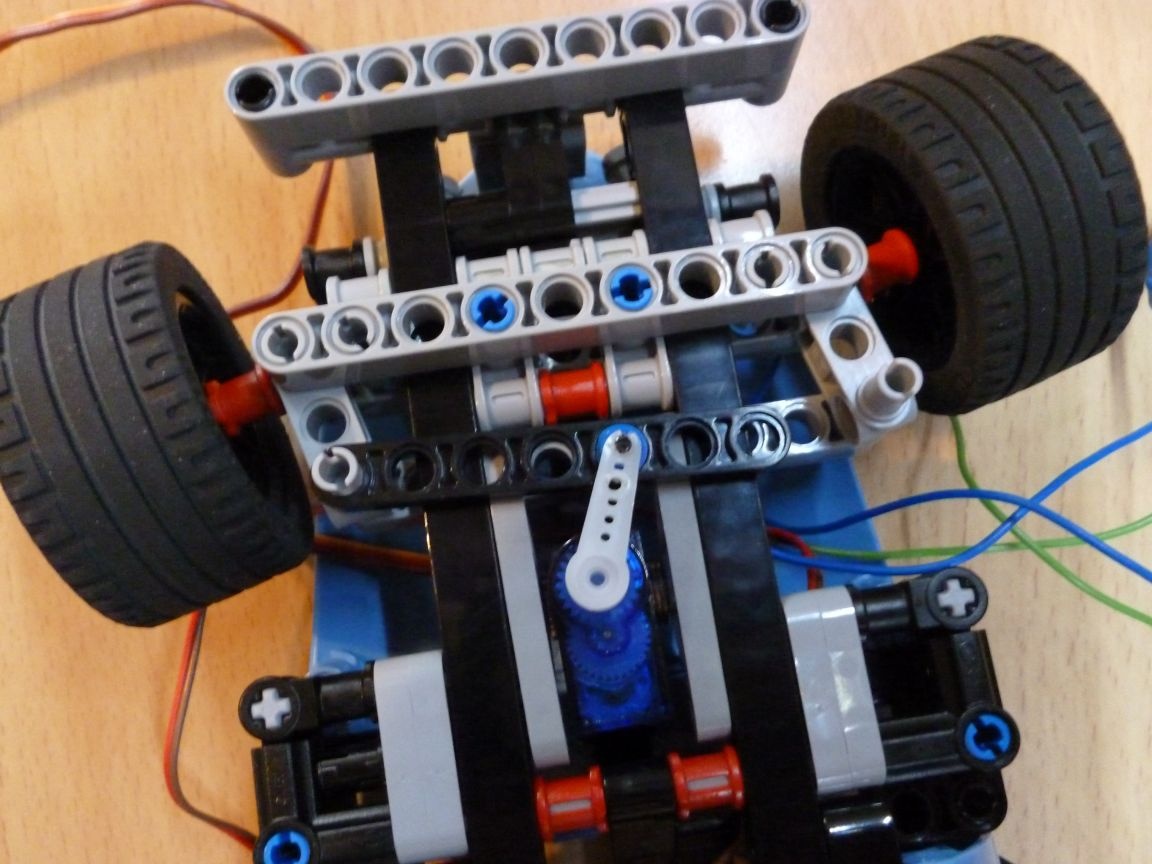
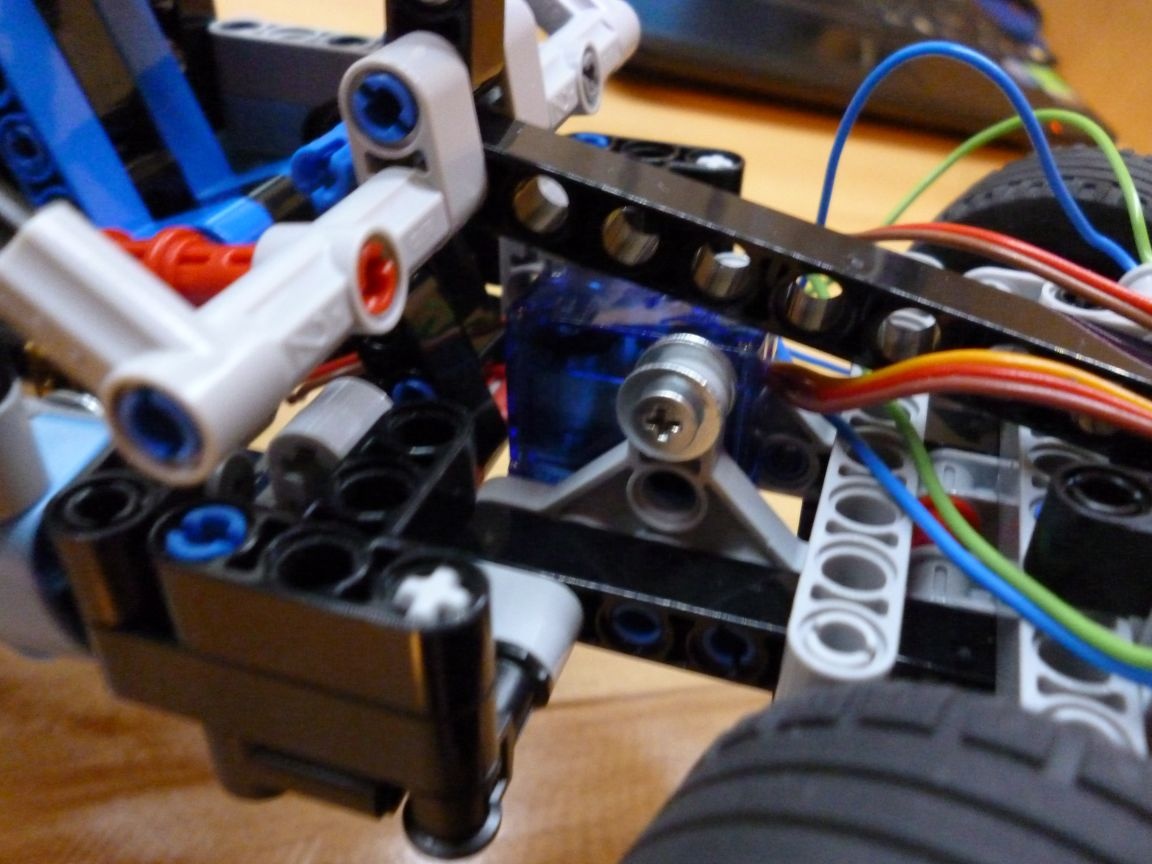
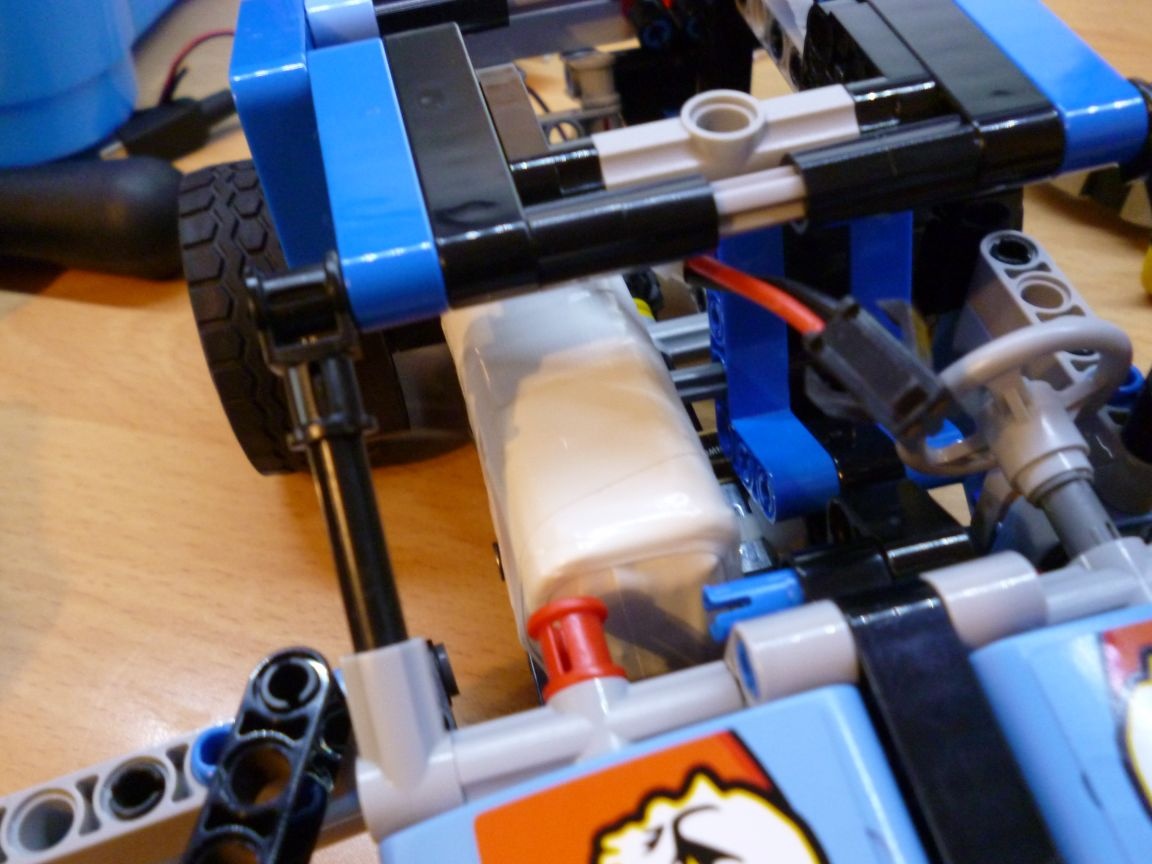
Để thực hiện lần lượt, hãy sử dụng servo SG-90 được sửa đổi một chút. Vỏ máy phải được khoan cẩn thận để không chạm vào các bộ phận bên trong, lỗ xuyên qua có đường kính 3,2 mm hoặc đơn giản là cắt bằng dao văn phòng phẩm.

Chúng tôi chèn một bu lông vào lỗ được tạo ra, và trên các cạnh chúng tôi đặt trên các tấm hình tam giác và cố định bằng các đai ốc. Chúng tôi đặt cần gạt lên trục servo và gắn chặt bộ phận vào cần số Lego. Trên một máy đánh chữ, nó trông như thế này:
Bước 3 là thợ điện.
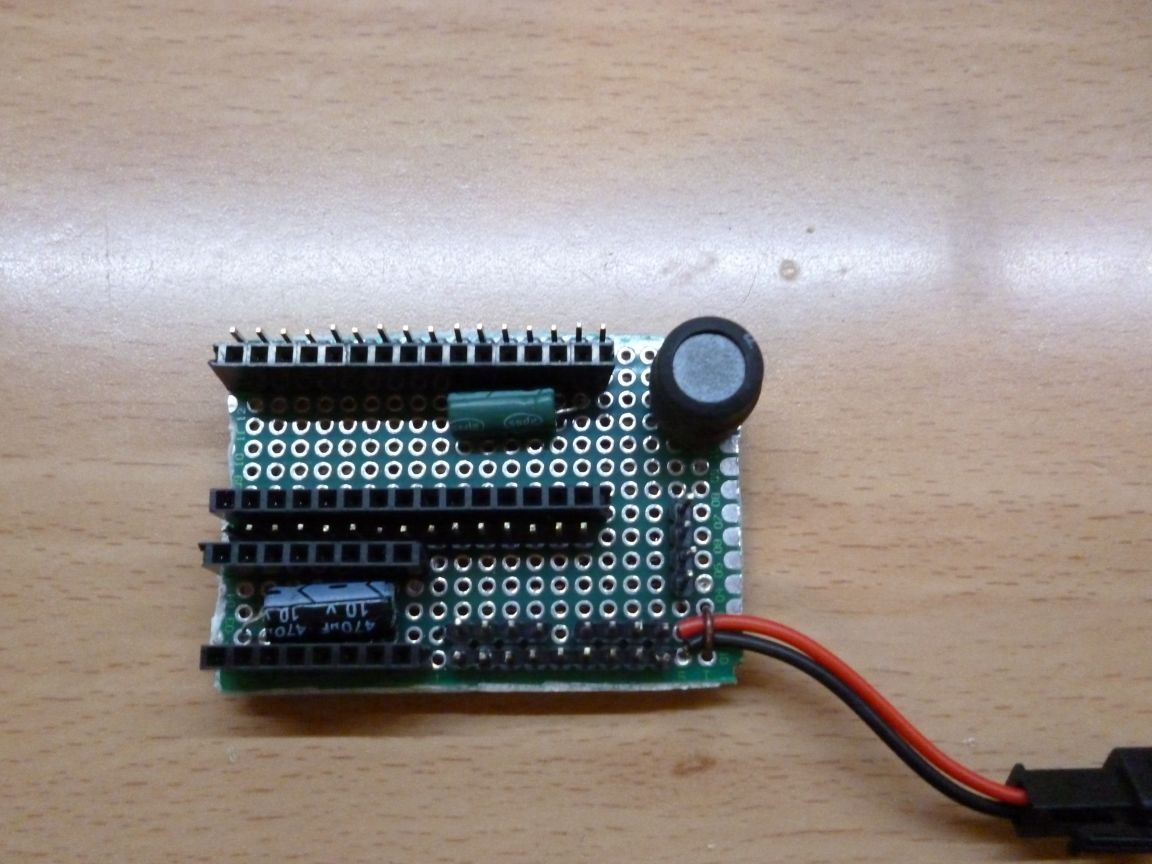
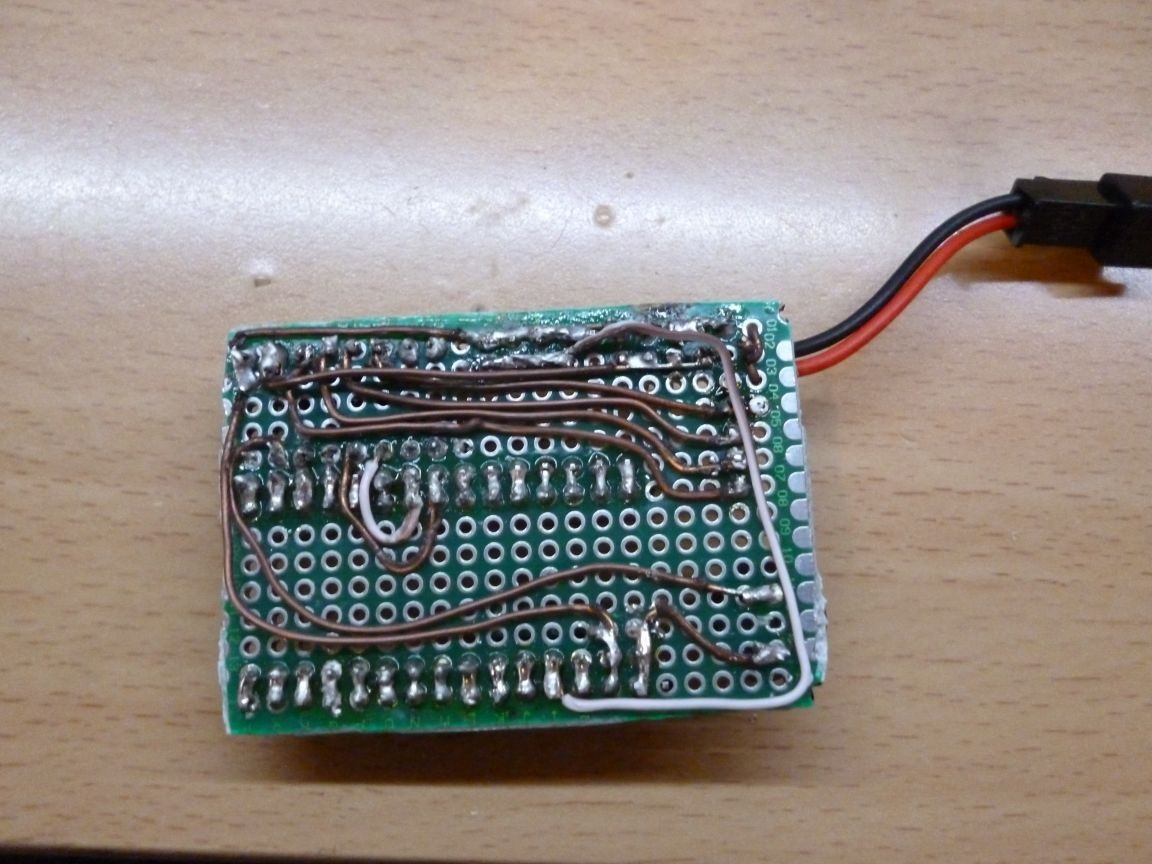
Hàn sắt trong tay và đi. Tất cả các điện có thể được lắp ráp đơn giản bằng cách kết nối các dây gắn. Nhưng điều này là bất tiện, vì nó đòi hỏi nhiều không gian. Ngoài ra, có khả năng cao là liên hệ với chất lượng kém. Vì vậy, tốt hơn là hàn mọi thứ trên bảng mạch theo sơ đồ sau:
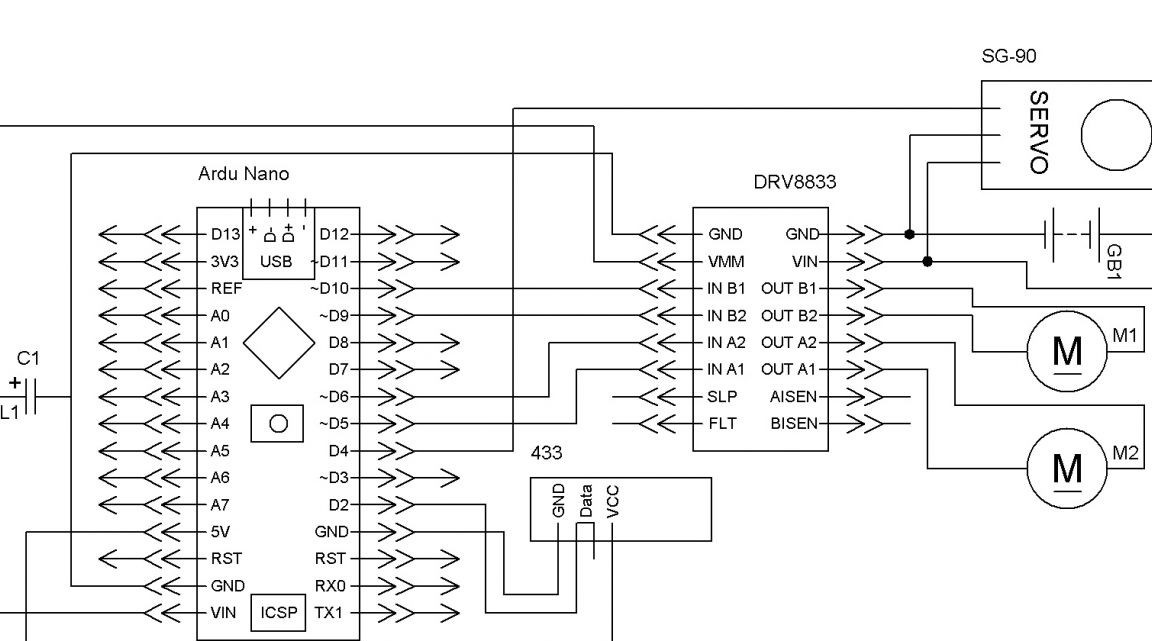
Illll mang lại một chút rõ ràng: bạn có thể lấy bất kỳ tụ điện công suất thấp nào, bạn cũng có thể tìm thấy một cuộn cảm thuộc bất kỳ loại nào, điều này là cần thiết để ổn định điện áp của vi điều khiển. Ăng-ten phải được hàn vào máy thu. Tôi đã nhận được như sau:
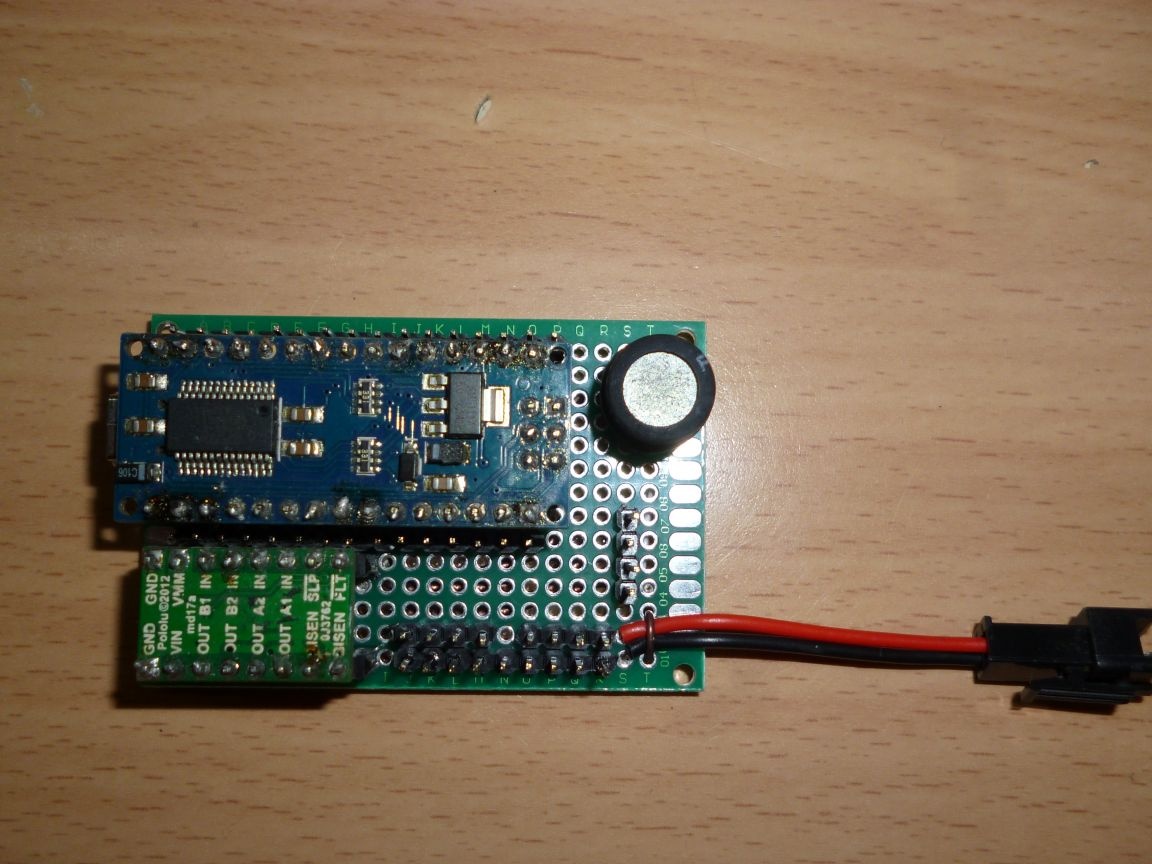
Chúng tôi đặt Arduino Nano và DRV 8833 vào vị trí của chúng:
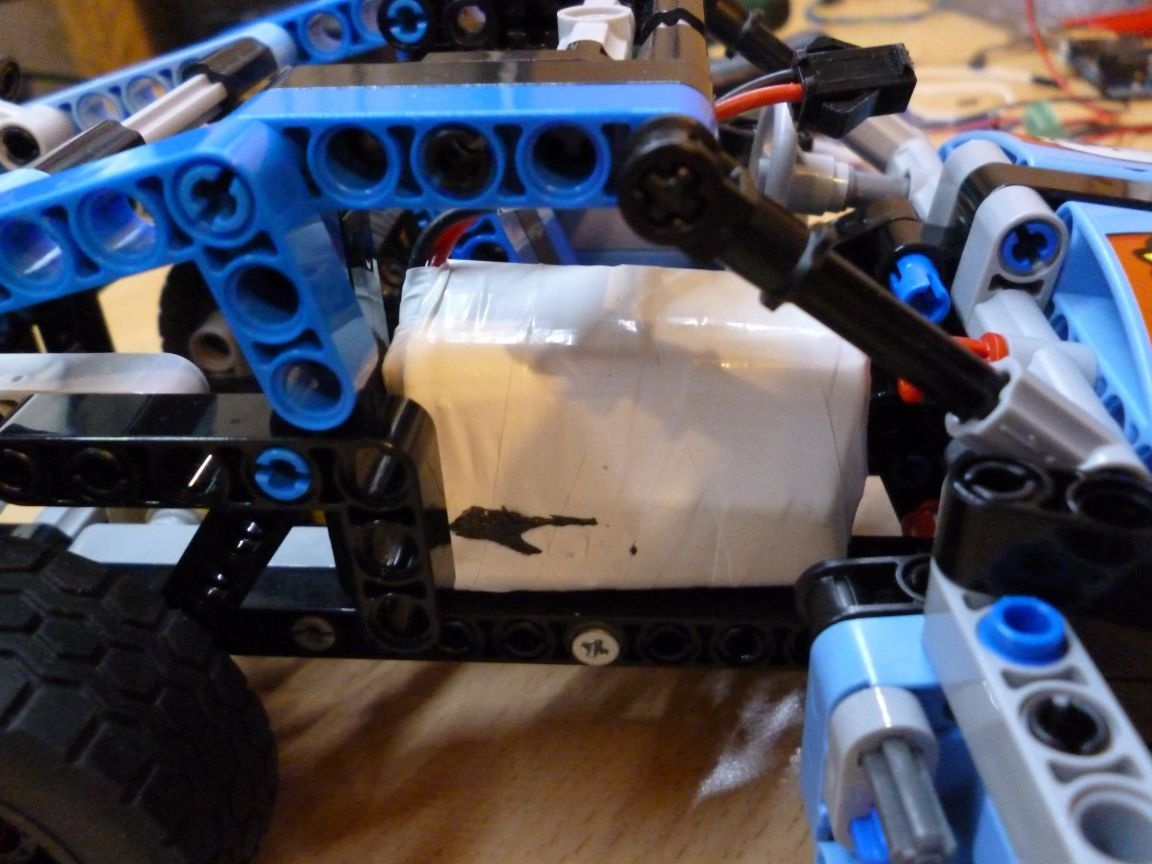
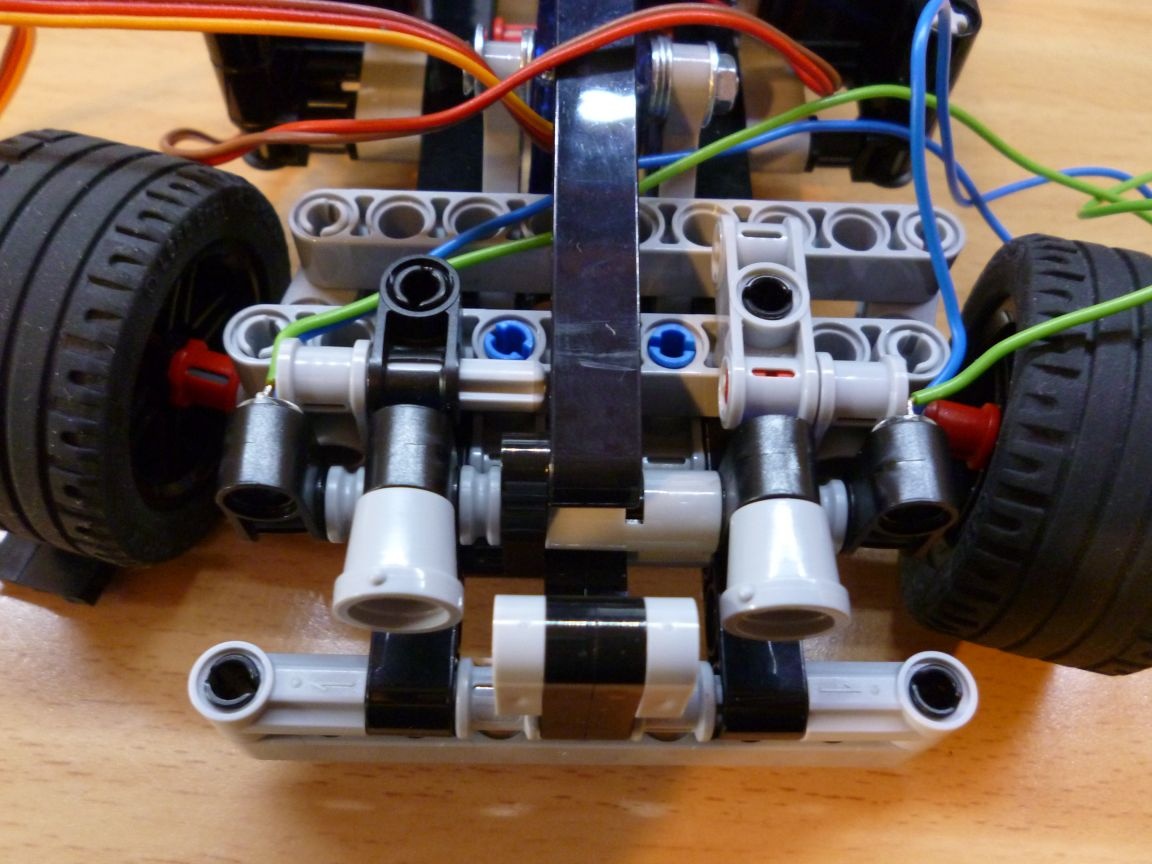
Để cung cấp năng lượng, chúng tôi sẽ sử dụng 6 pin Ni-Mn 1.2v 1000mA, được hàn nối tiếp và băng dính bằng băng keo điện. Dán chúng lên ghế hành khách dán băng dính hai mặt.

Chúng tôi kết nối mọi thứ theo sơ đồ và cài đặt ở mặt sau của máy. Bạn cũng có thể thêm một vài đèn LED. Đặt chúng vào đèn pha và kết nối với pin 14 (A2).
Bước 4 firmware.
Để viết firmware, tôi đã sử dụng Arduino IDE. Phiên bản hiện tại tại thời điểm viết là 1.8.1. Thật thuận tiện khi thực hiện giao thức truyền thông bằng mô-đun 433 MHz bằng thư viện RC-switch-2.52. Bạn cần tải nó xuống và thêm nó vào thư mục các thư viện của Wikipedia trong Arduino IDE.
Chúng tôi kết nối Arduino và flash nó với phần sụn sau:
Để kiểm tra hiệu suất của mô hình của chúng tôi, chúng tôi cần một bảng Arduino thứ hai. Cần phải kết nối một máy phát vô tuyến 433 MHz với bảng thứ hai. Máy phát được kết nối như sau:
VCC (máy phát) đến 5+ (Arduino),
GND đến GND,
DỮ LIỆU đến D10.
Viết bản phác thảo SendDemo đã sửa đổi ở đó. Đó là trong các ví dụ trong thư viện chúng tôi đã cài đặt và phục vụ để gửi lệnh. Trước khi flash phác thảo, bạn cần thay đổi một chút, cụ thể là thay đổi các lệnh được truyền. Tùy thuộc vào những gì bạn cần kiểm tra, hãy viết các lệnh sau vào dòng gửi:
1 1 - chuyển động về phía trước (viết một lệnh không có dấu ngoặc kép!)
"2" - chuyển động lùi
15 15 - hoàn toàn dừng lại
"3" - xoay vô lăng sang trái
"4" - xoay vô lăng sang phải
"5" - đặt vô lăng ở giữa
"10" - bật đèn pha
"11" - tắt đèn pha
Tạo một điều khiển từ xa với một máy phát radio 433 MHz là một chủ đề cho một bài viết riêng. Tôi chắc chắn sẽ viết hướng dẫn sản xuất một điều khiển từ xa như vậy.
Tôi muốn nói rằng tùy chọn này phù hợp với hầu hết mọi mẫu xe Lego. Nó là đủ để kết nối tất cả các cơ học và tìm một nơi cho bảng. Và nếu bạn bao gồm tưởng tượng, thì bạn có thể cơ giới hóa bất kỳ mô hình nào.