

Chúc người yêu ngày tốt lành của arduino! Khi nó được treo trên Internet, tôi đã bắt gặp một bài viết khá thú vị về cách biến một bàn tay thành một tay thao tác lặp đi lặp lại các chuyển động của một người tay, lấy cảm hứng từ sự đơn giản và hiệu quả tự làm tự quyết định thu thập nó. Tôi đã tìm thấy các cảm biến uốn cong trên Alliekspress cho tay máy phát và có một chút chết, một điều nằm ở khu vực 15-20 đô la, hóa ra 5 cảm biến như vậy chỉ bằng một tay sẽ có giá 75 - 100 đô la và điều này chỉ dành cho các cảm biến! Sau một thời gian, tôi đã học được cách chế tạo những cảm biến như vậy tự làmHóa ra nó rất đơn giản và rẻ tiền.
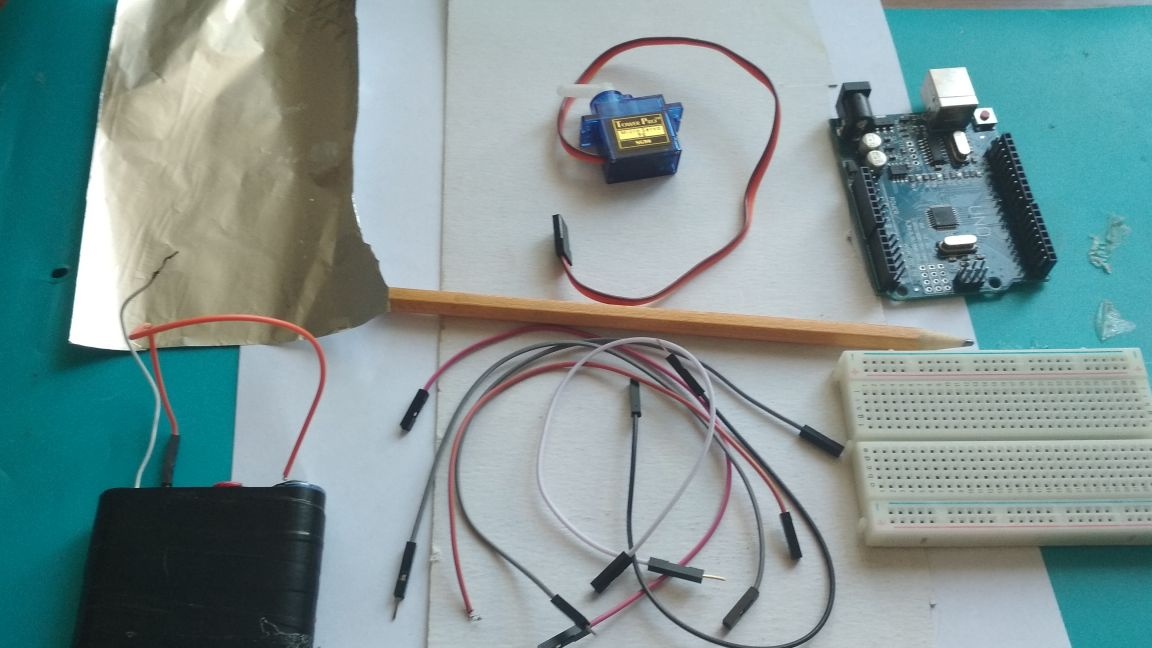
Và vì vậy, đối với cảm biến uốn cong, chúng ta cần:
thanh toán Arduino Uno ()
-breadboard
- kết nối dây như "cha-mẹ" hoặc "cha-cha"
thần kinh
thùng carton
giấy
giấy bạc
bút chì
- cấp nguồn từ 6 đến 12 volt (Tôi sử dụng 4 pin được kết nối nối tiếp ở 1,5 V)
Từ các công cụ chúng ta cần:
súng bắn keo
kéo
Và vì vậy, điều đầu tiên chúng tôi cắt ra từ bìa cứng là hai dải dài hơn 2 cm so với ngón trỏ của bạn và rộng khoảng 1 cm:
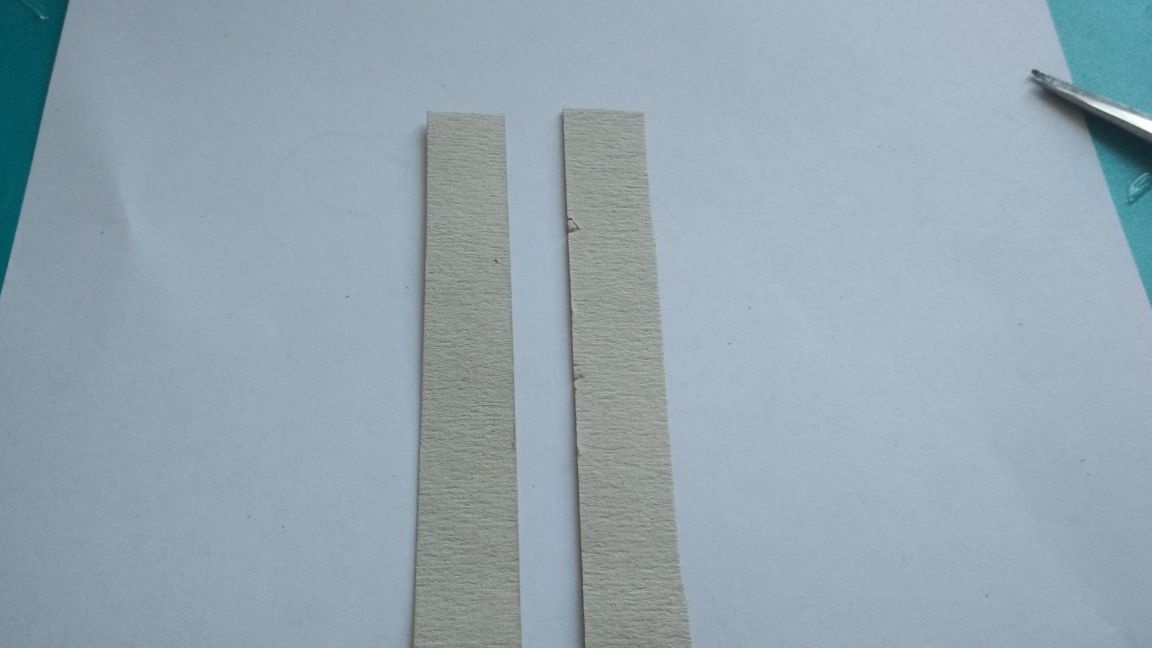

Cắt một trong những dải giấy giống nhau ít hơn một chút:

Bút chì che cả hai mặt của dải giấy càng tốt càng tốt:


Cắt hai dải giấy bạc nhỏ hơn giấy:
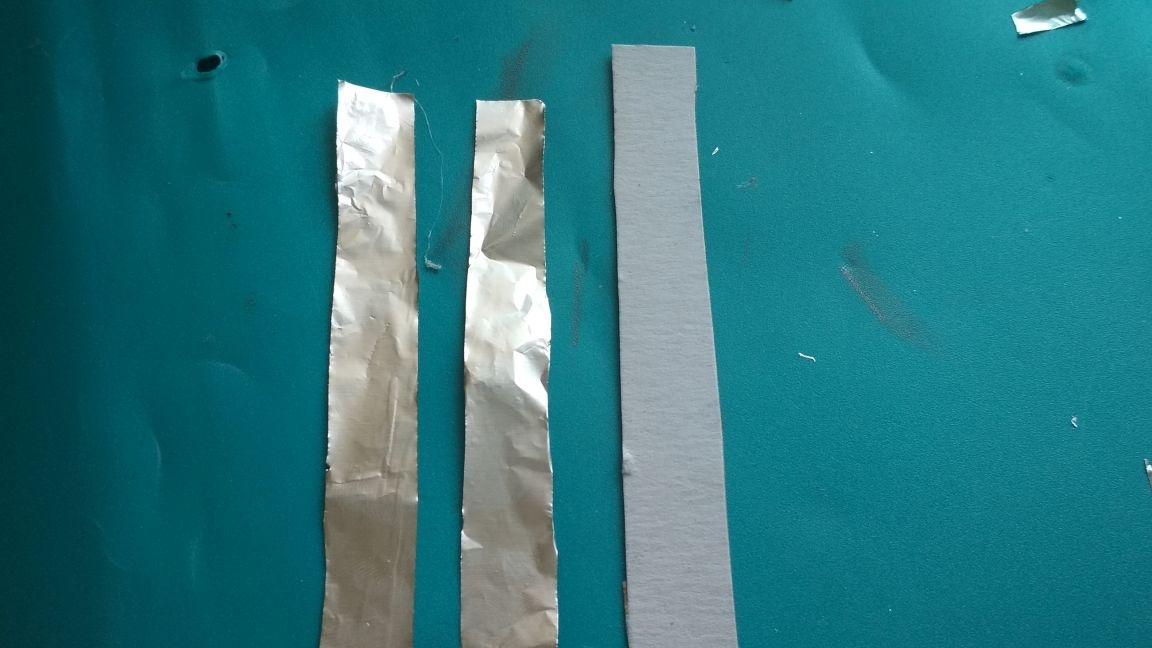
Dán chúng vào các dải các tông như trong ảnh:

Từ dây kết nối, cha mẹ, mẹ chúng tôi đã cắt đứt lối ra mẹ mẹ và chúng tôi làm sạch đầu của chúng khỏi lớp cách nhiệt:
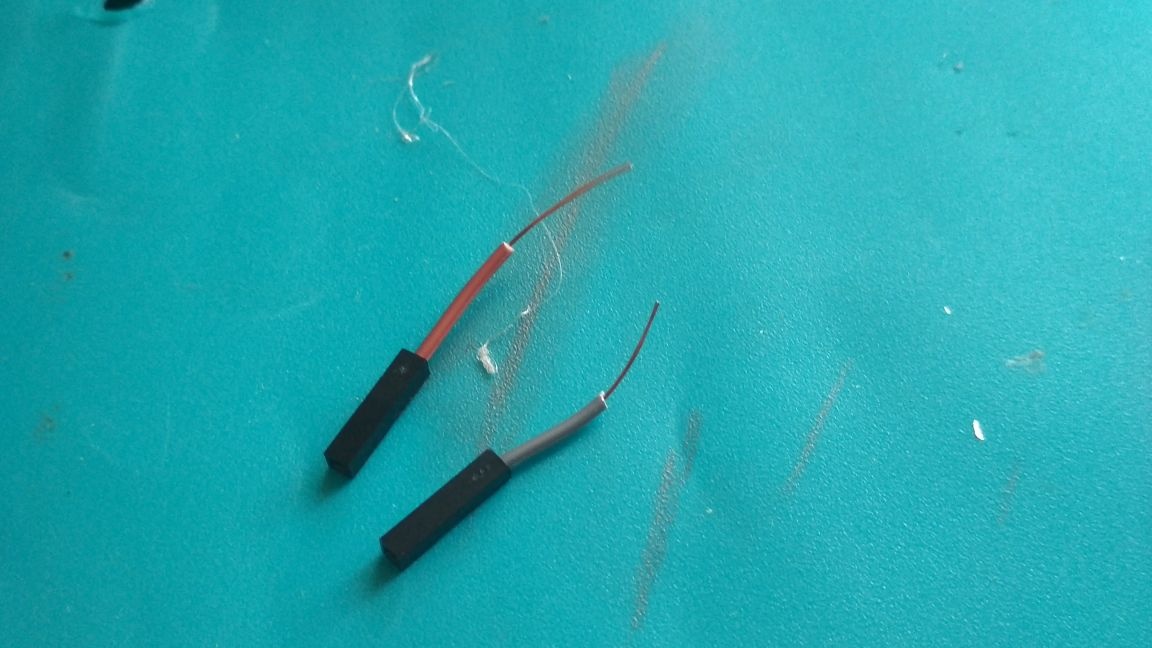
Chúng tôi đính kèm từ băng hoặc hàn:

Chúng tôi gắn một dải giấy vào một trong các nửa, để nó tiếp xúc với giấy bạc, sau đó phủ một nửa mặt thứ hai bằng giấy bạc, ấn và dán ở hai bên:

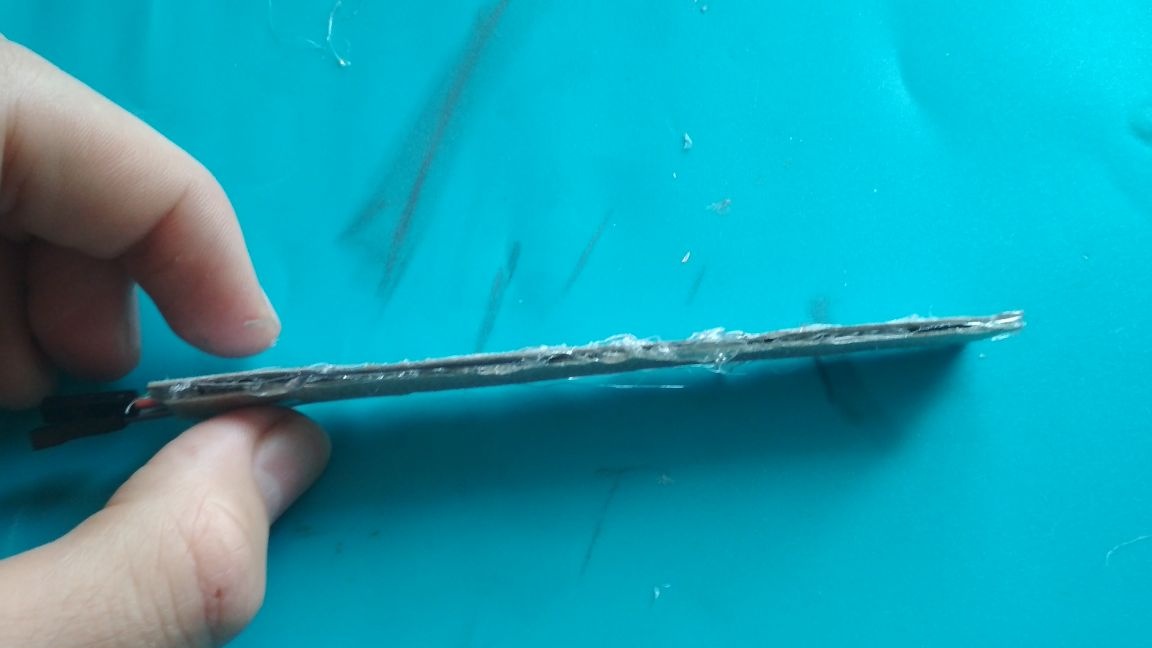

Chúng tôi tạo ra những con rắn rắn như vậy ở mỗi bên với sự trợ giúp của keo nóng, chúng cần thiết để thiết kế linh hoạt hơn

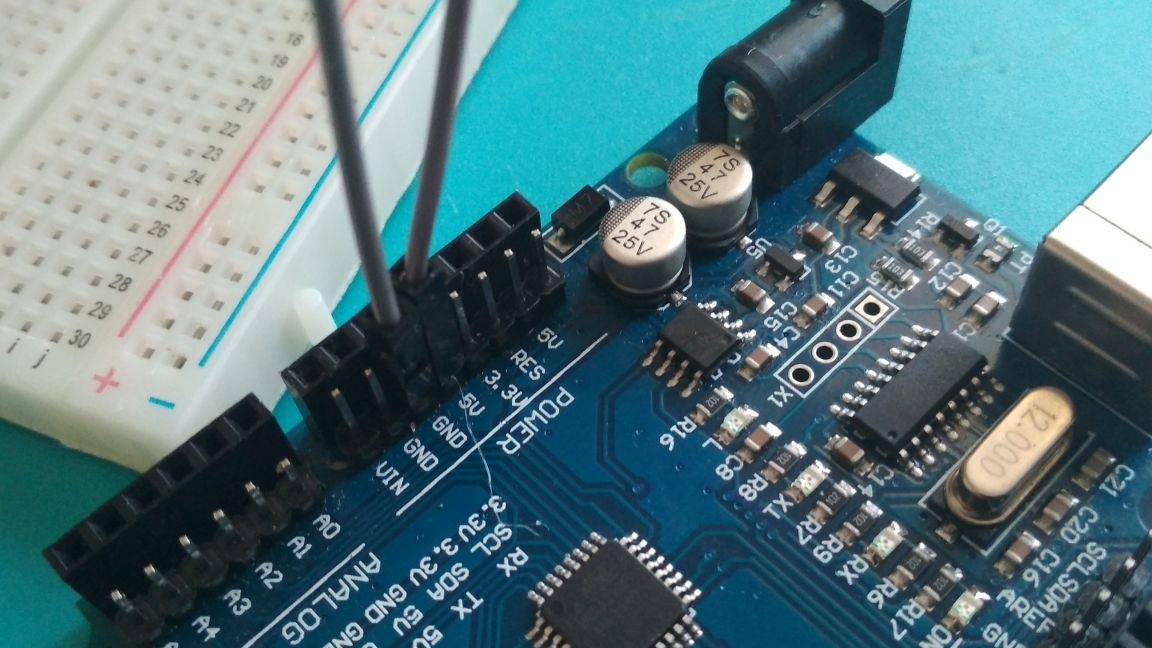
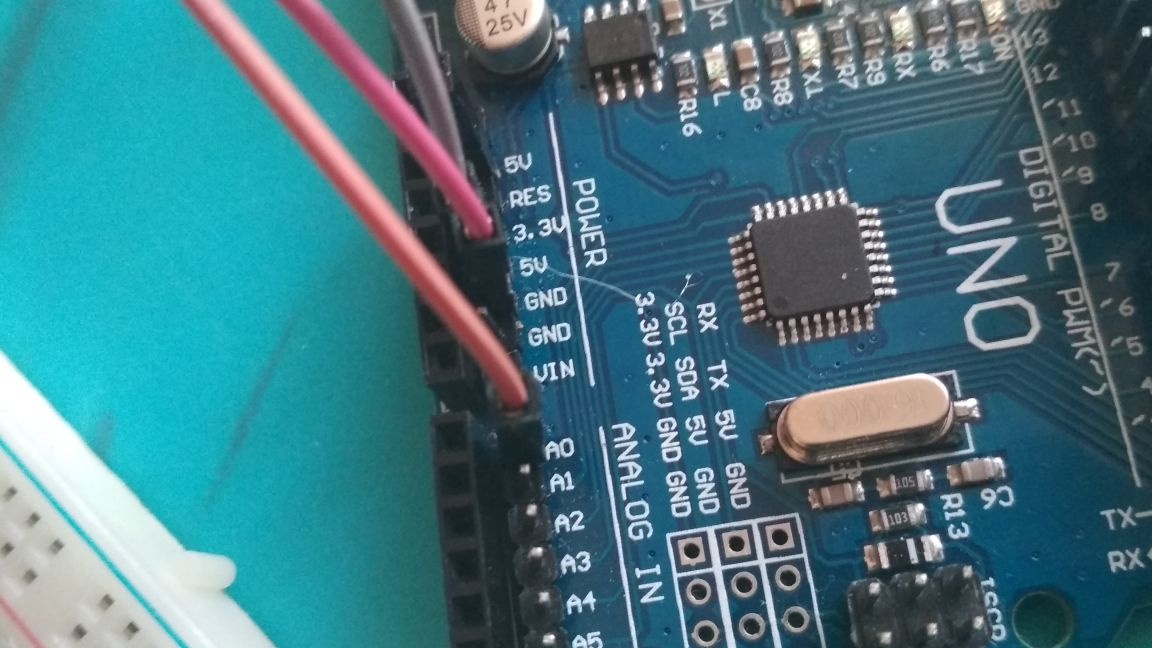
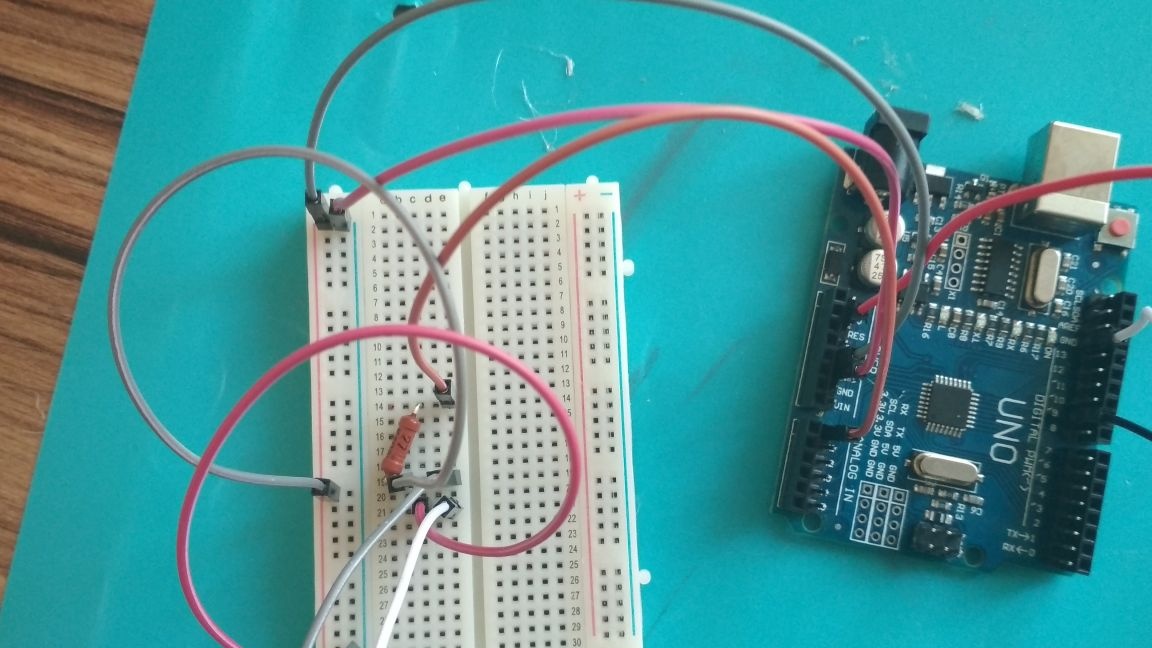
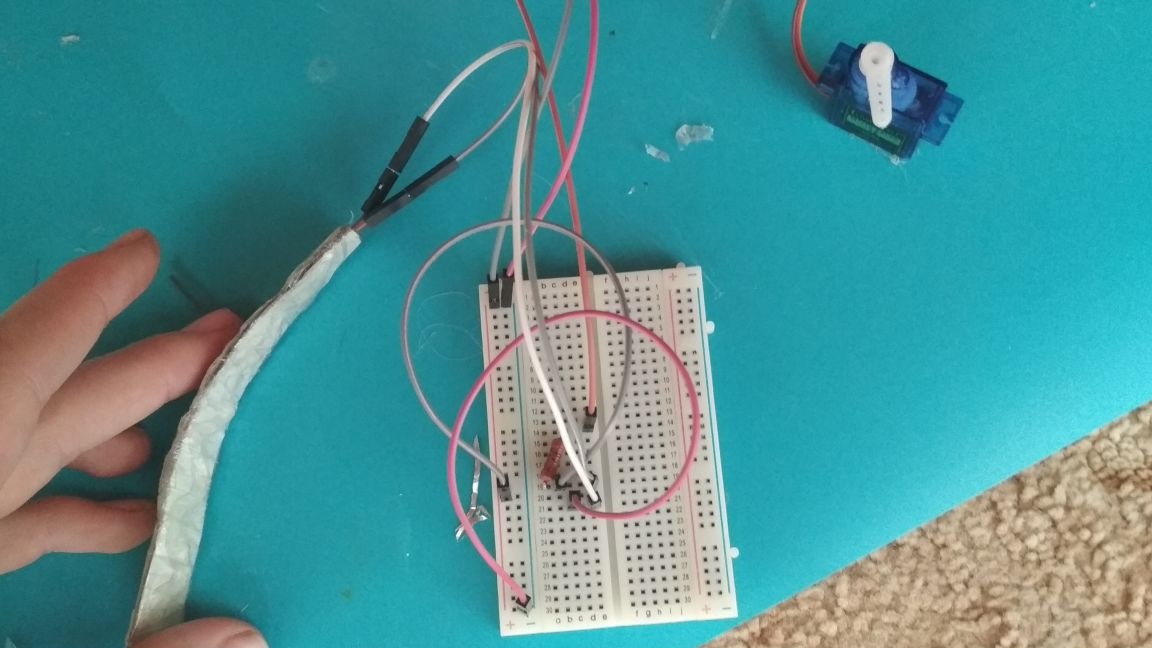
Chúng tôi lấy một arduino và kết nối đầu ra 5v với điểm cộng của bảng mạch và Gnd với điểm trừ:

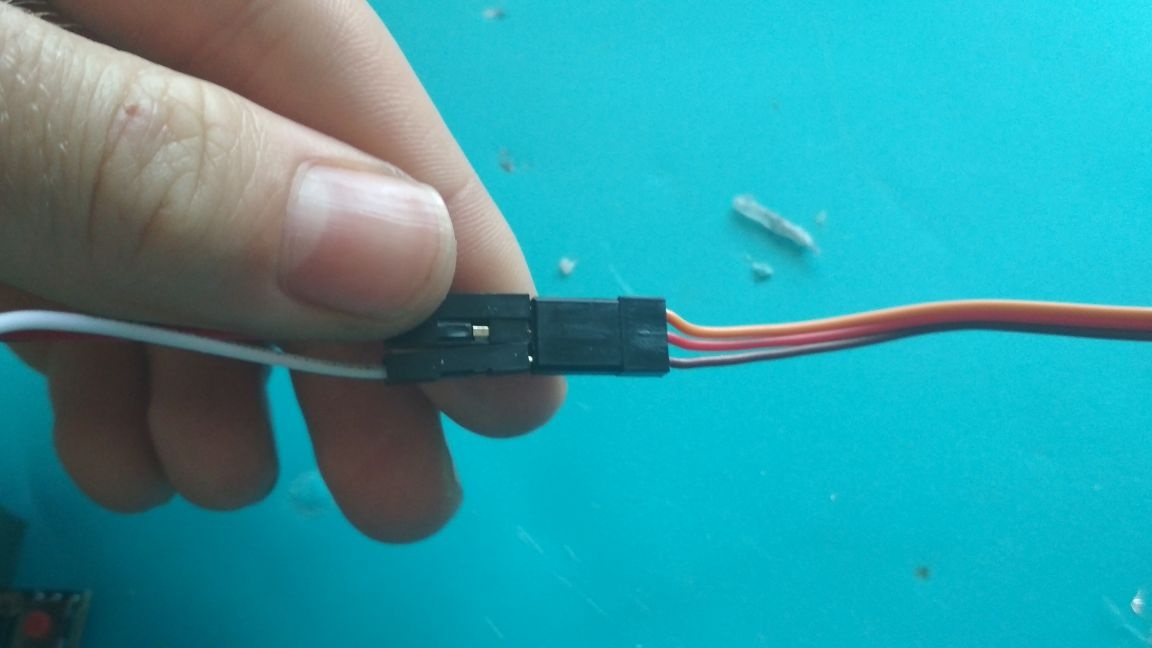
Thêm các dây kết nối vào động cơ servo và kết nối nó với arduino như sau:
Dây màu nâu để gnd
đỏ đến 5v
cam đến 9 pin
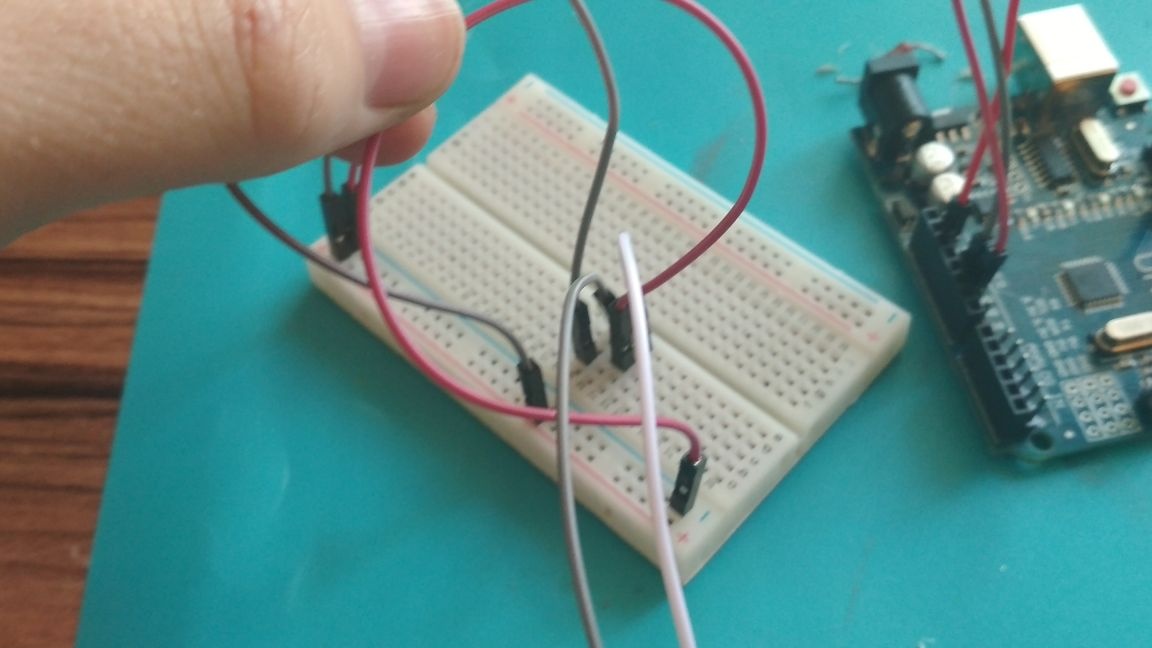
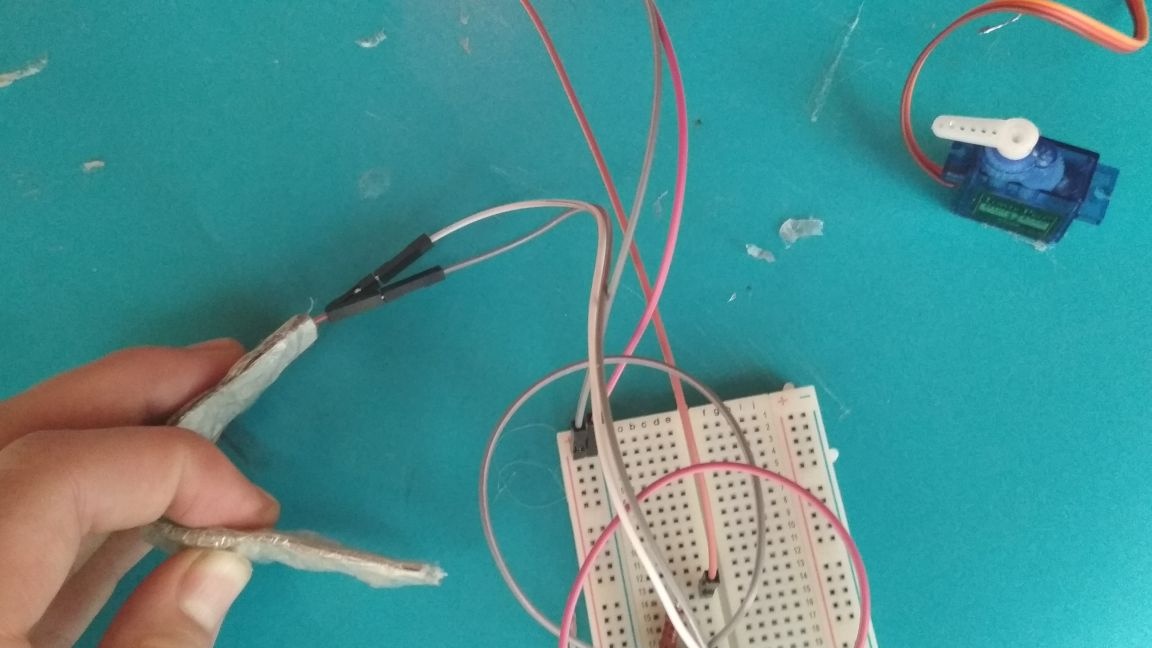
Để cảm biến uốn cong của chúng tôi, thêm hai dây cha-cha

Kết nối chúng với bảng điều khiển:
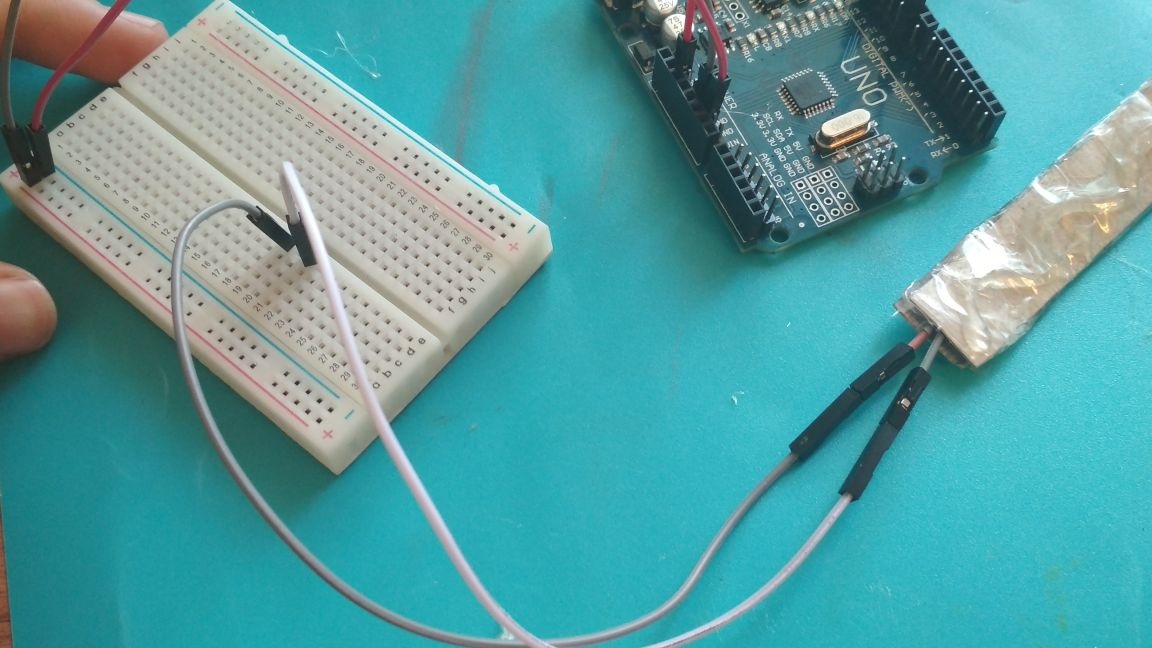
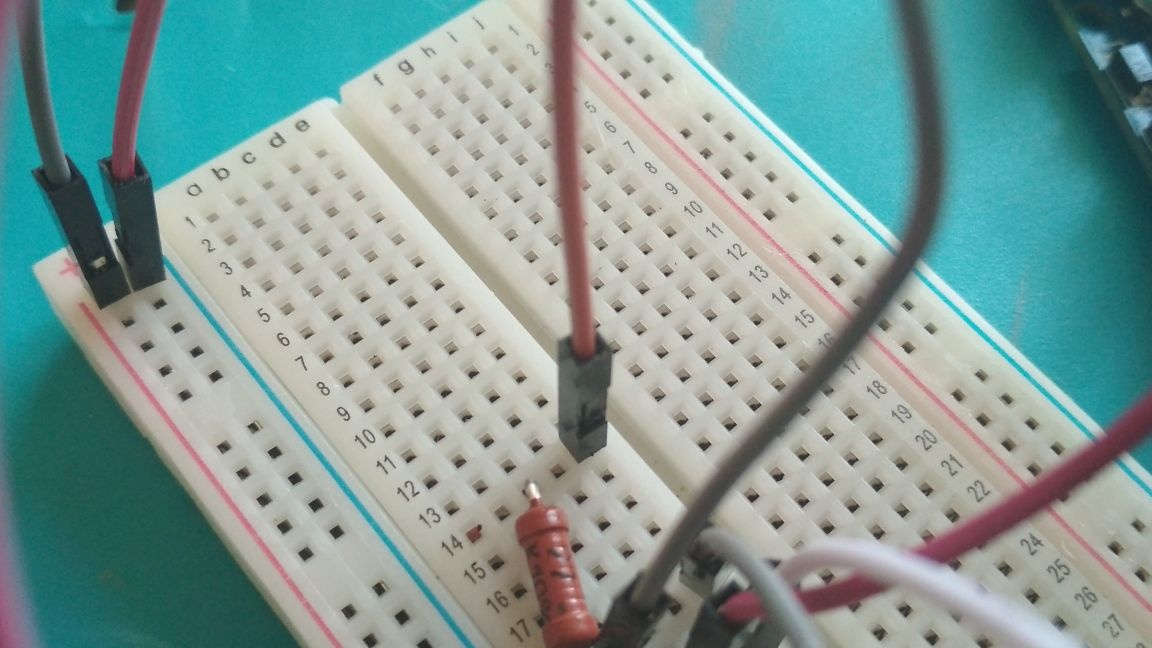
Một trong hai đầu của cảm biến được kết nối với điểm cộng của bảng mạch thông qua điện trở 22 kilo-ohm (không may là tôi đã trộn nó và kết nối nó với đầu ra khác, nhưng điều này không đáp ứng với khả năng hoạt động) và cái còn lại với điểm trừ:
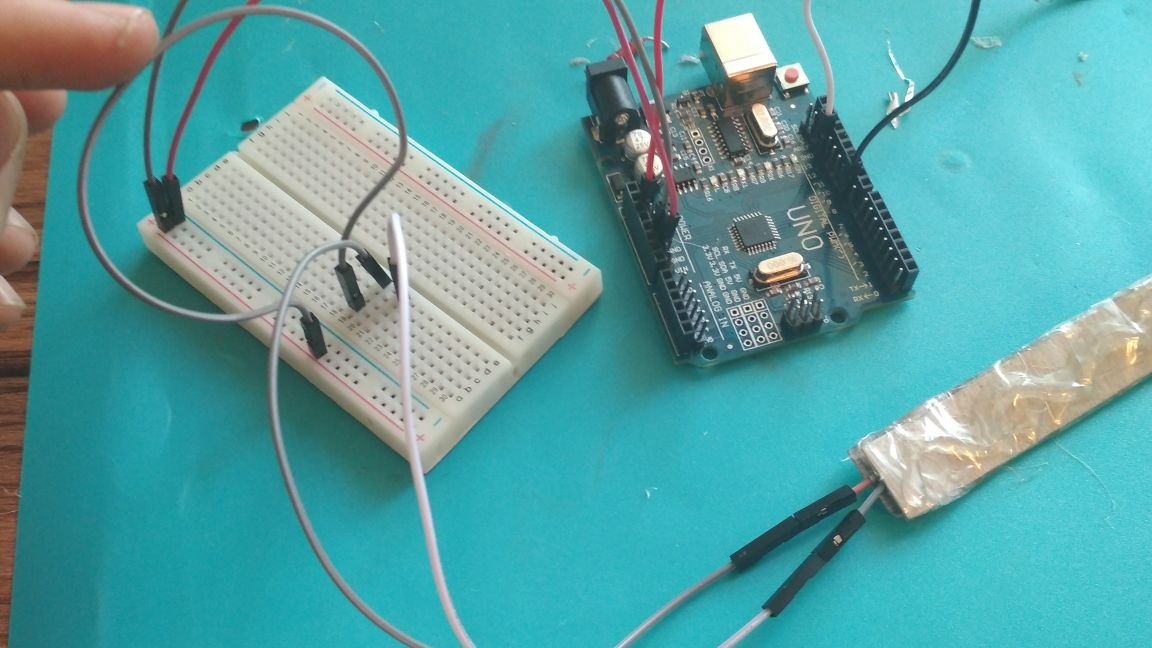
Trên dòng Breadboarda mà đầu cuối của cảm biến được kết nối với dấu cộng được đặt, thêm một dây khác và xuất nó ra đầu ra A0 trên Arduino:
Bây giờ chúng tôi kết nối Arduino với máy tính, khởi động Arduino IDE và tải bản phác thảo sau vào nó:
#incolee
Servo servo1;
const int flexpin = 0;
thiết lập void ()
{
Nối tiếp.begin (9600);
servo1.attach (9);
}
vòng lặp void ()
{
uốn cong int;
int dịch vụ định vị;
flexposeition = analogRead (flexpin);
dịch vụ định vị = bản đồ (flexposeition, 1018, 1023, 0, 90);
dịch vụ định vị = constrain (dịch vụ định vị, 0, 90);
servo1.write (dịch vụ định vị);
Serial.print ("cảm biến:");
Serial.print (uốn cong);
Số sê-ri ("servo:");
Serial.println (dịch vụ định vị);
độ trễ (1000);
}Bật màn hình cổng mà Arduino được kết nối và tải bản phác thảo

Bây giờ chúng tôi quan sát những thay đổi xảy ra trong màn hình cổng khi cảm biến của chúng tôi uốn cong, chúng tôi thấy rằng 1023 là 90 độ và 1020 và 1019 là 0, vì vậy, trong trường hợp của tôi, tôi thay đổi số 1018 trong bản phác thảo thành 1020, bạn có thể có một số khác. Bây giờ 1020 là 0 độ, và 1023 là 90 độ. Sau tất cả các thay đổi, tải lên bản phác thảo tùy chỉnh mới lên bảng Arduino


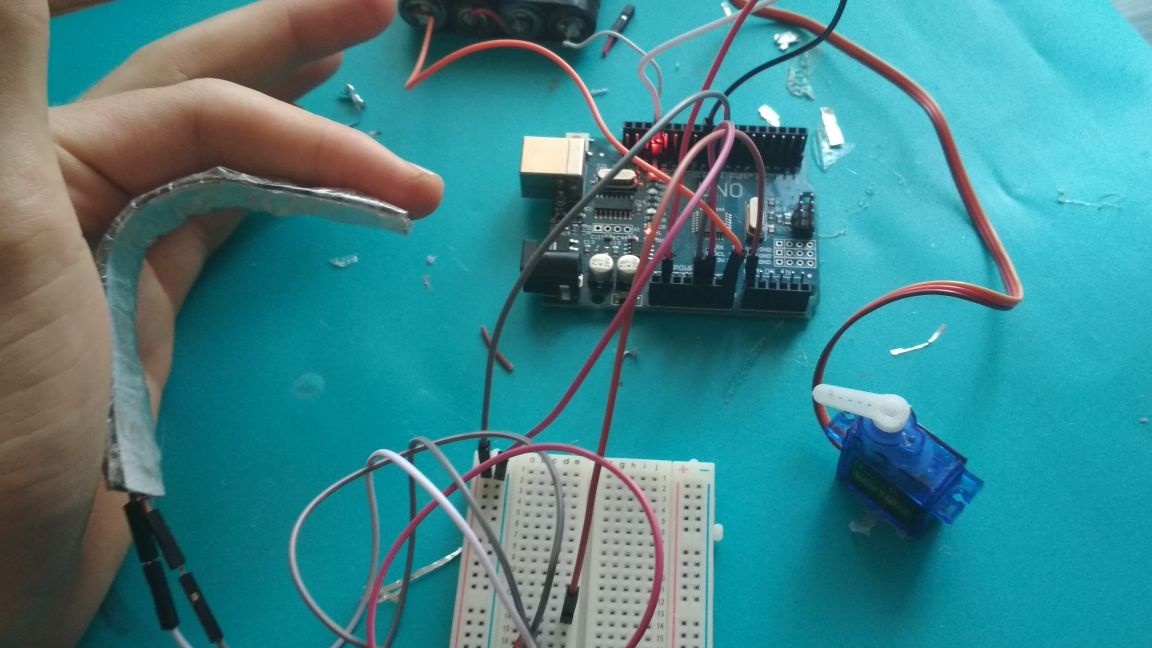
Chà, đó là nó! Cảm biến uốn đơn giản và quan trọng nhất của chúng tôi đã sẵn sàng!
Nếu mọi thứ được thực hiện chính xác, khi cảm biến bị bẻ cong, ổ đĩa servo sẽ quay 90 độ và khi được mở rộng, nó sẽ trở về vị trí ban đầu. Tất nhiên, độ chính xác của cảm biến này kém hơn so với cái đã mua, nhưng nó phù hợp với các dự án không đặc biệt nhầm lẫn, và bên cạnh đó, nếu bạn làm mọi thứ cẩn thận và tinh chỉnh nó, nó sẽ biến thành gần như đã mua. Tôi hy vọng bài viết này hữu ích cho ai đó.
Cảm ơn tất cả sự quan tâm của bạn!