


Trong bài viết này, Wizard sẽ cho chúng ta thấy cách anh ấy thực hiện chiếc máy bay trực thăng Lego 60193 Arctic Air Transport mô hình tứ giác. Nhiệm vụ chính trong việc chế tạo bộ tứ cực, ngoài phẩm chất bay, là tiết kiệm càng nhiều bộ phận nguyên bản càng tốt.
Chúng ta hãy xem một đoạn video ngắn trình bày hoạt động của bộ tứ cực.
Vì vậy, để sản xuất một bộ tứ cực như vậy, chủ đã sử dụng như sau
Dụng cụ và vật liệu:
-LEGO Máy bay trực thăng Bắc Cực Thành phố - 60193:
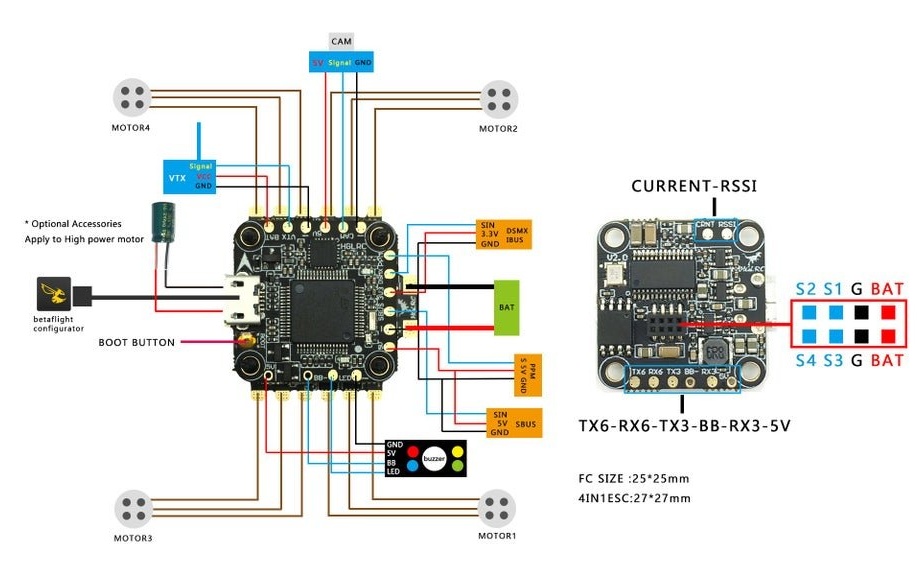
- Bộ điều khiển và ESC 20x20 mm, ví dụ, HGLRC XJB F428 Micro F4 AIO OSD;
- Động cơ không chổi than - 4 chiếc;
Cánh quạt
-B pin 950 mAh;
-Kết nối;
-Wire;
Mô-đun -Rio (máy phát và máy thu);
-Fastener;
-Knife;
-Sanh sắt;
Súng -Gue;
- tuốc nơ vít;
-Drill;
Bước một: Xây dựng Lego
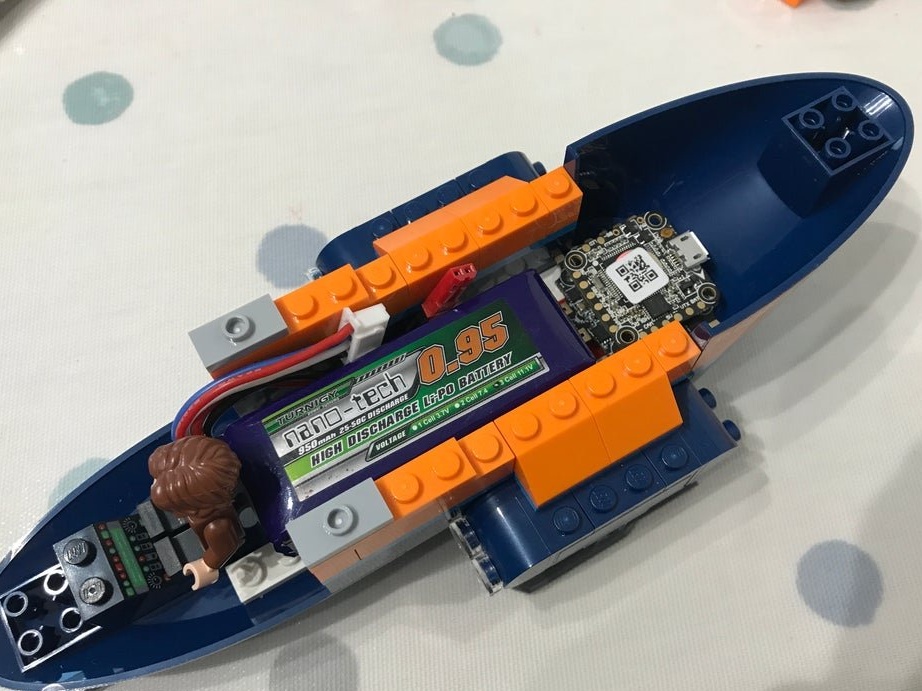
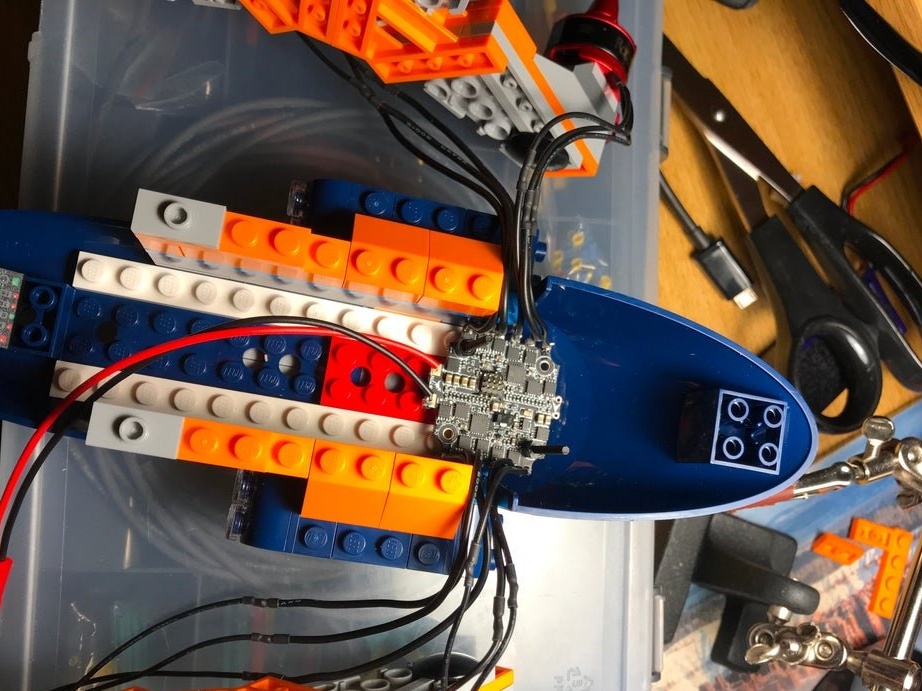
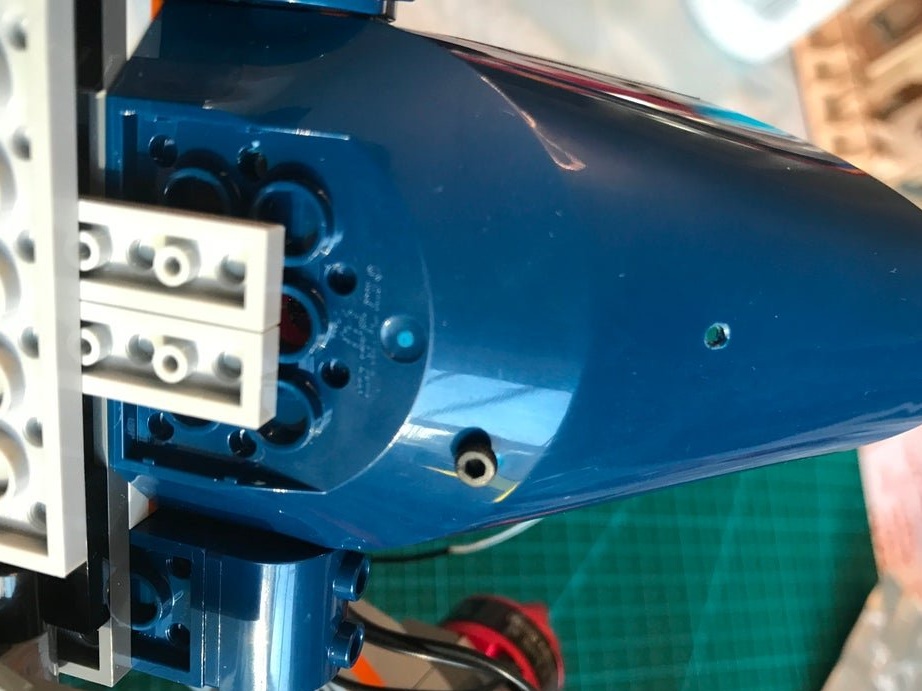
Đầu tiên, bậc thầy thu thập LEGO-Bắc Cực. Sau đó, mô hình được tháo rời một phần. Bên trong, bạn cần đặt pin và bộ điều khiển, quan sát sự cân bằng của mô hình.


Bước hai: Gắn kết động cơ
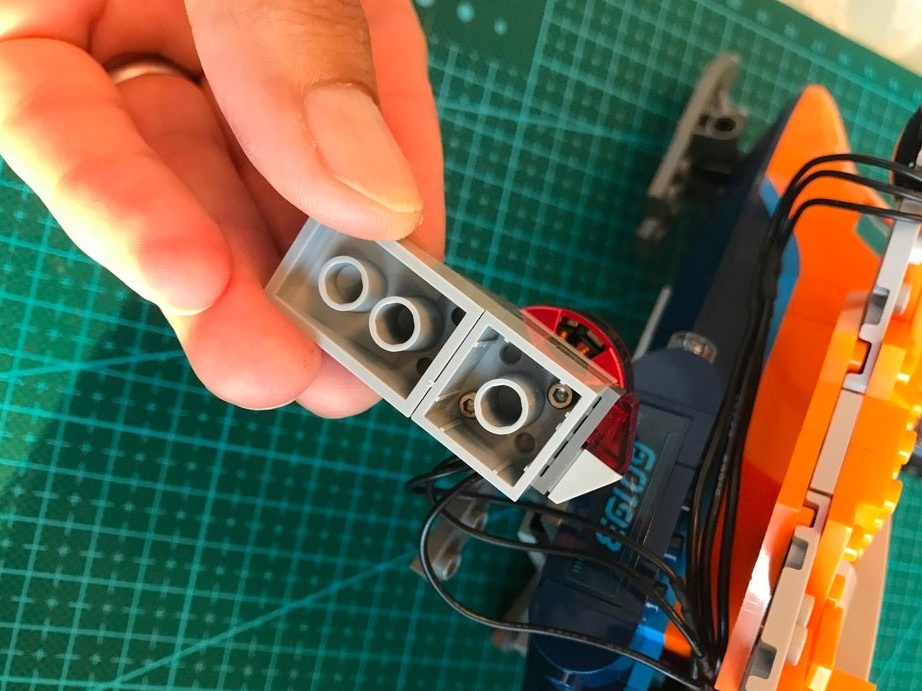
Các lỗ lắp cho động cơ không chổi than 1806 tiêu chuẩn khá giống với các đinh tán trên tấm LEGO 2x2 tiêu chuẩn. Mỗi động cơ của máy tính gắn trên một động cơ quadrocopter có một ngói màu xám đen 2x2 (LEGO 3022) và ngói màu xám nhạt 2x2 với một chốt dọc (LEGO 2460), thường được giữ trên các trục của chân vịt LEGO trên đầu.
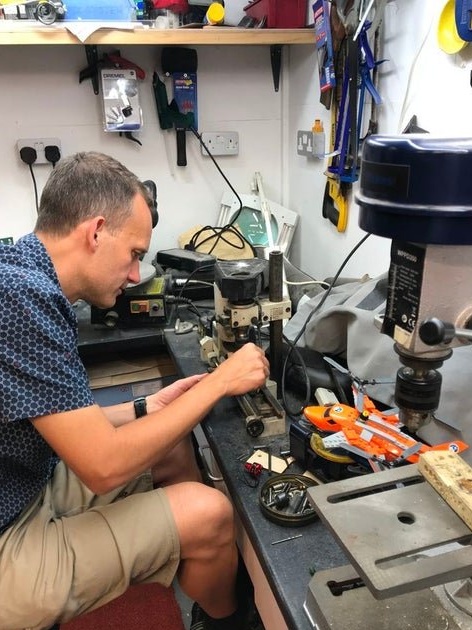
Các bậc thầy khoan các lỗ gắn. Trên động cơ, ở trung tâm có thủy triều thấp. Một lỗ dưới nó được khoan ở trung tâm của gạch. Bảo vệ động cơ.








Bước ba: Vai
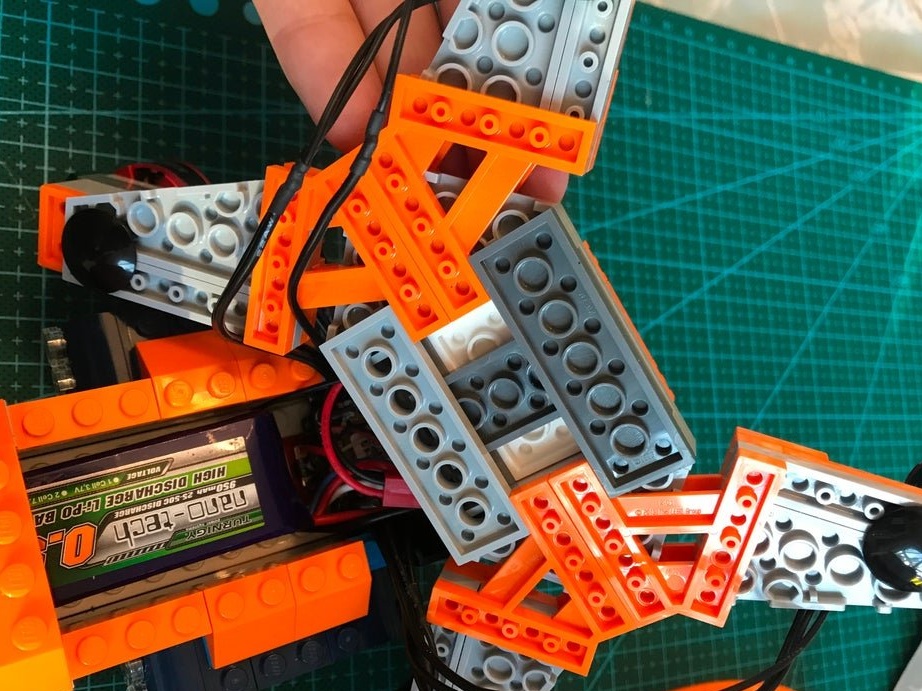
Sắp xếp lại các vai trên vai của các bộ tứ, bạn có thể thay đổi bố cục một chút để sắp xếp các động cơ rộng hơn hoặc hẹp hơn và vị trí của các ốc vít so với nhau.
Bộ lắp ráp LEGO tiêu chuẩn (ảnh đầu tiên) có vai Vai và các động cơ được đặt rộng (theo chiều ngang) với một chồng vít khá lớn. Bậc thầy làm lại các vai trên vai và ném động cơ và theo đó là các ốc vít.



Bước bốn: điện tử
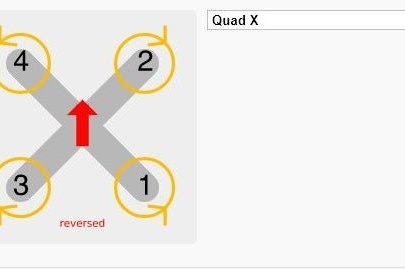
Theo đề án, nó cài đặt thiết bị điện tử. Bức ảnh đầu tiên cho thấy một sơ đồ về hướng quay của động cơ. Hướng quay cũng có thể được thay đổi ở giai đoạn lập trình.

Sau khi cài đặt hoàn tất và trước khi kết nối pin, trình hướng dẫn sẽ kiểm tra các kết nối để tránh bị vỡ hoặc đoản mạch.
Khi bạn bật nguồn, bạn sẽ thấy đèn trên bộ điều khiển chuyến bay và một vài tiếng bíp từ ESC.
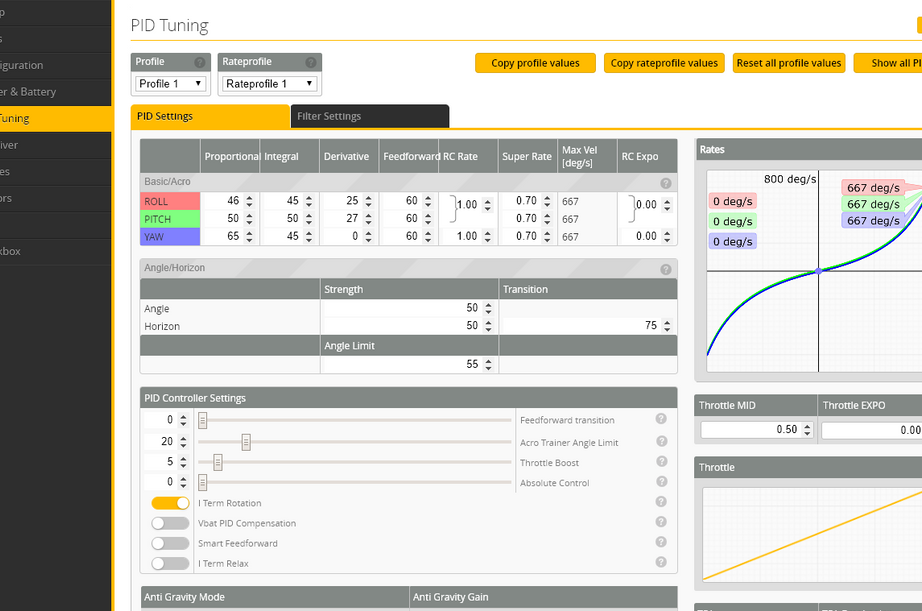
Bước năm: Thiết lập
Bây giờ mọi thứ đã được kết nối, đã đến lúc cấu hình bộ điều khiển.Điều này có nghĩa là tải xuống phần mềm (phần mềm nhúng) thực hiện nhiệm vụ giải mã tín hiệu điều khiển từ bộ phát RC, xử lý tín hiệu đầu vào cảm biến (máy gia tốc, con quay hồi chuyển) và cung cấp tín hiệu điều khiển để ESC quay động cơ ở tốc độ nhất định.
Tháo cánh quạt cho an toàn! Không cần pin cho một vài bước thiết lập đầu tiên, chỉ có nguồn USB.
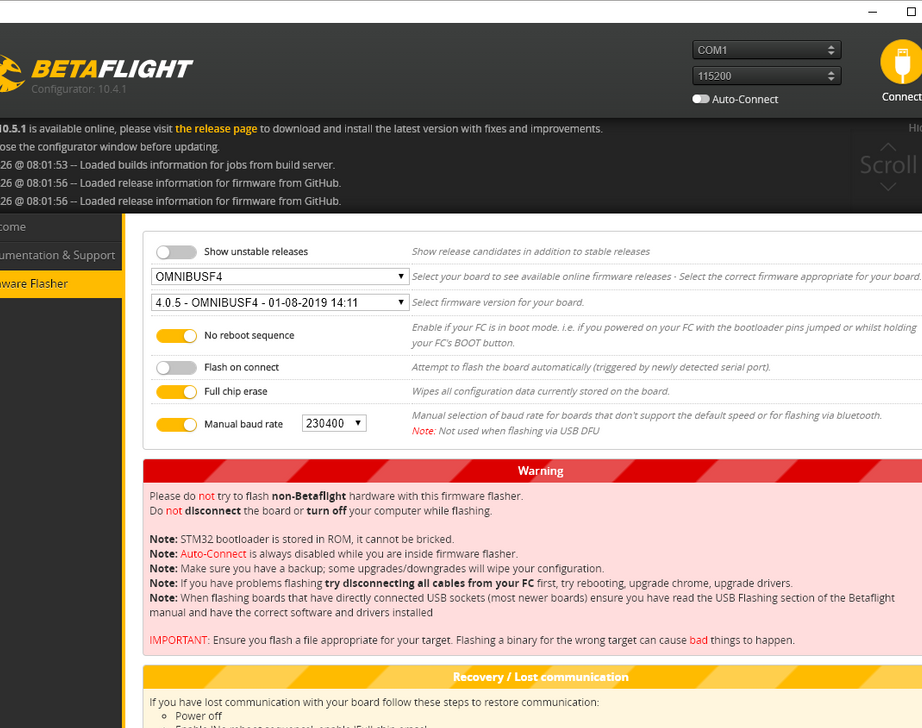
Tải xuống Trình cấu hình Beta
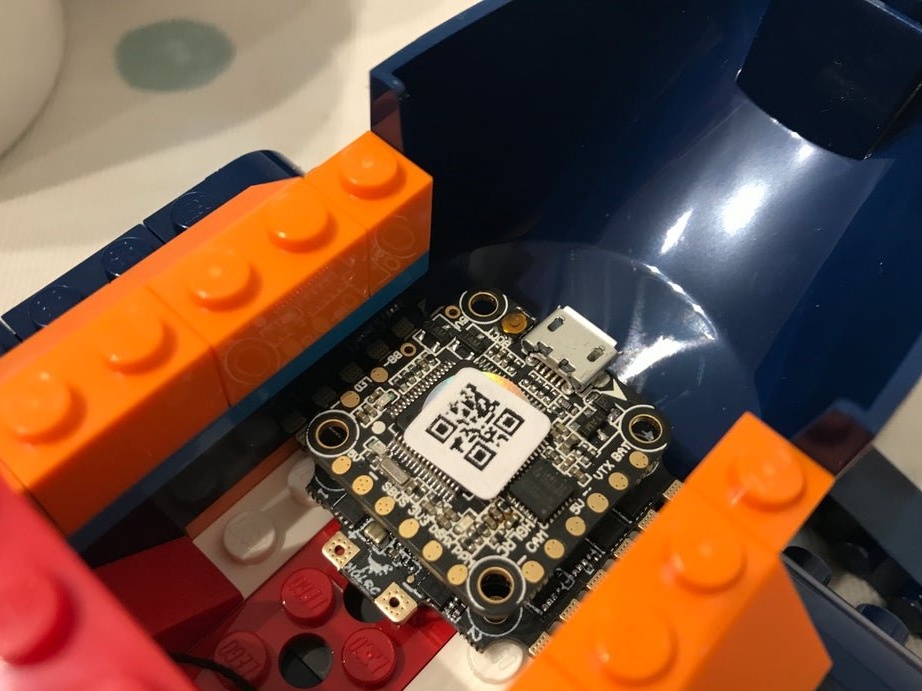
Kết nối cáp micro USB với bộ điều khiển chuyến bay. Xin lưu ý rằng điều này có thể dễ thực hiện hơn nếu bộ điều khiển không được vặn vào khung máy.
Tải xuống và tải lên phần sụn thích hợp cho bộ điều khiển chuyến bay.
betaflight-settings-legoquad.txt
Nhấp vào nút Kết nối trực tiếp và cấu hình các cài đặt sau:
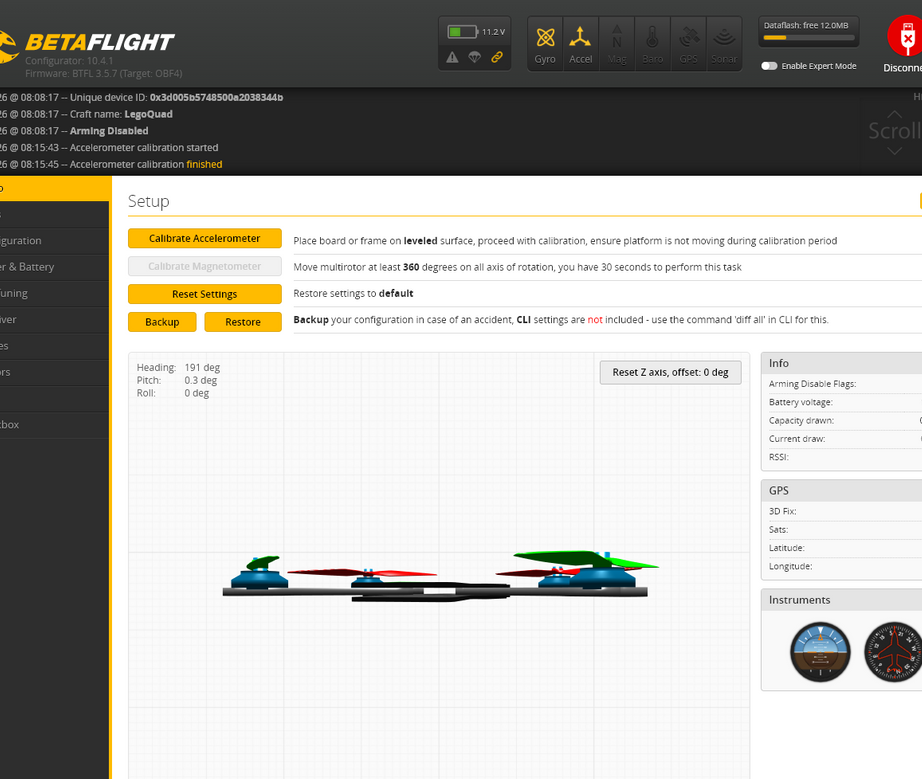
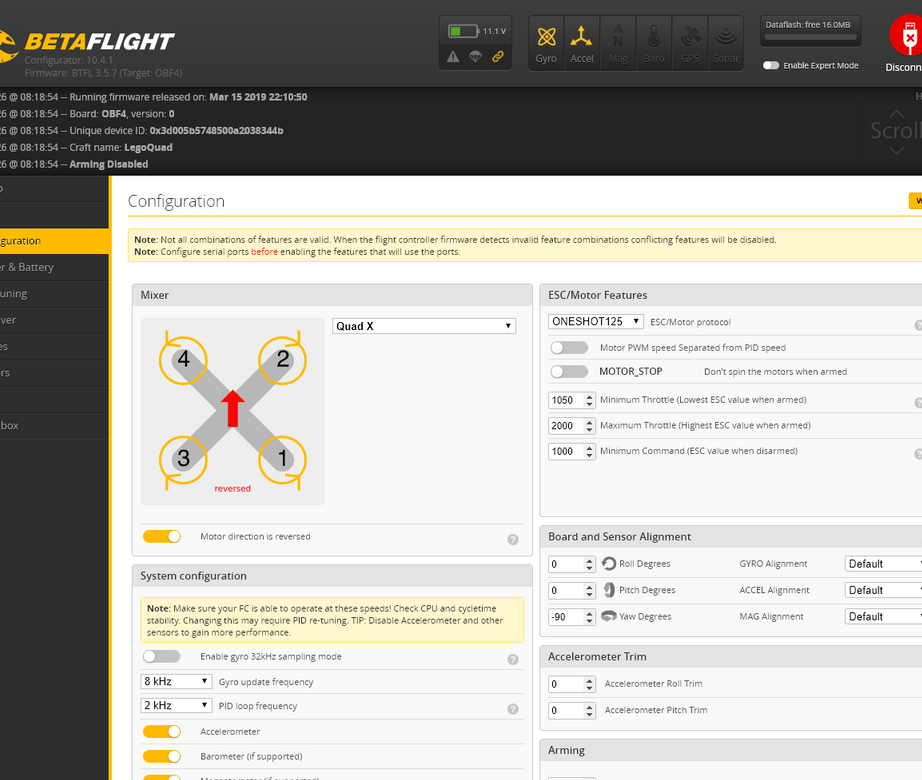
1. Cài đặt - hiệu chuẩn mô hình của động cơ
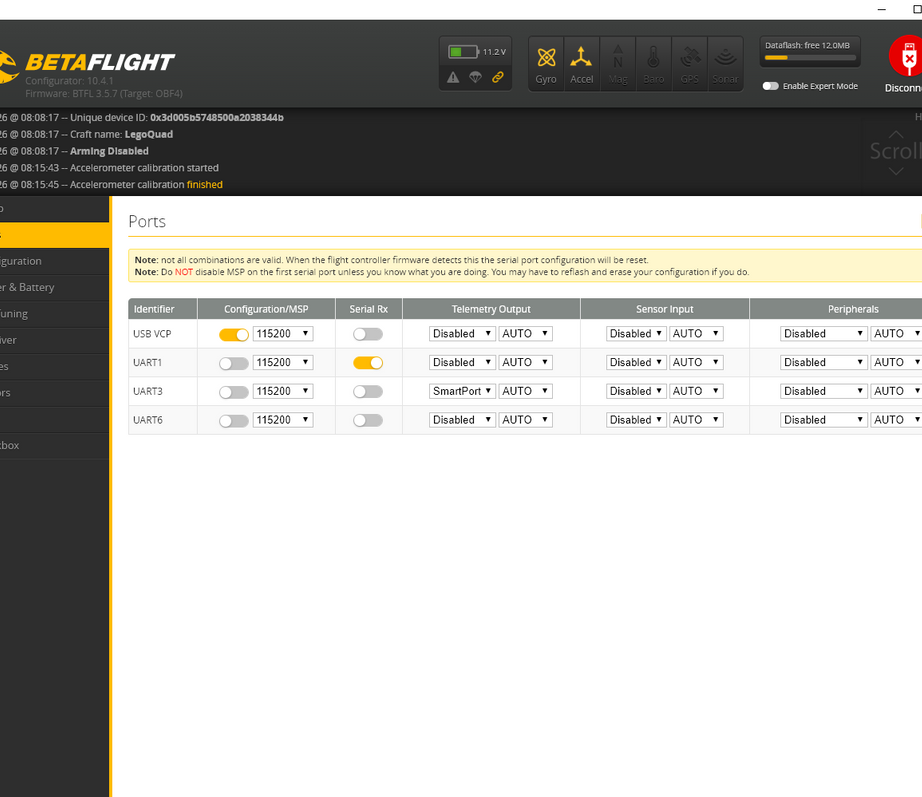
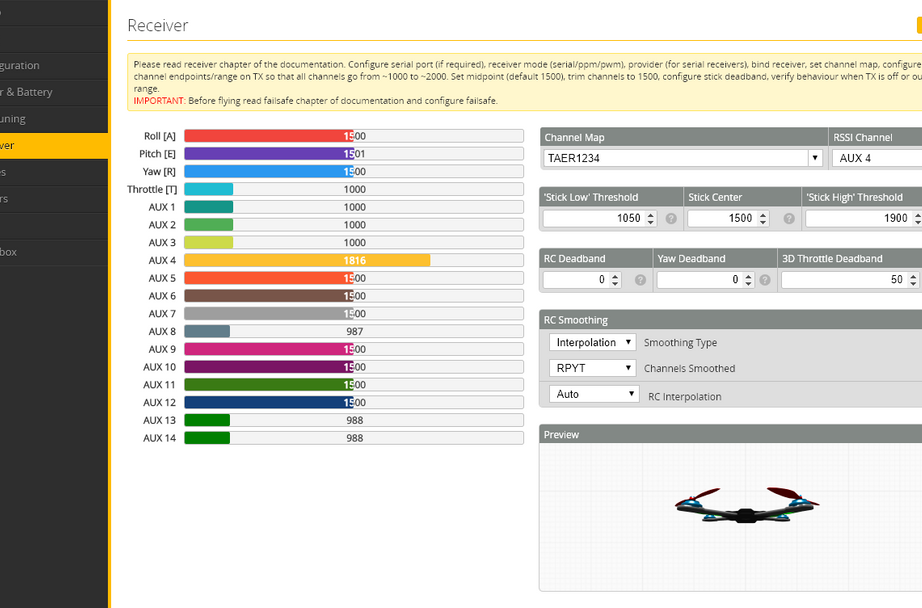
2. Chỉ định các cổng - UART1 - RX nối tiếp để kết nối máy thu SBUS RC
3. Lưu và khởi động lại
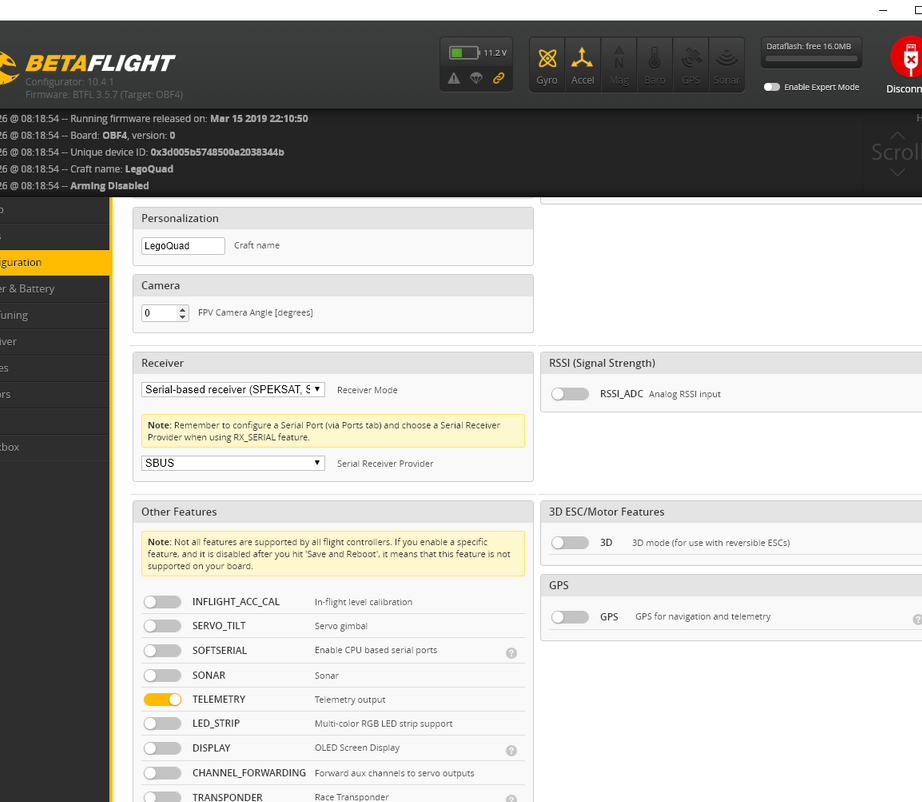
4. Thiết lập kết nối giữa máy thu và máy phát
5. Quá tải
6. Giá trị cho tổng thể PID được đặt thành 250
7 Kết nối pin
8. Điều chỉnh điện áp.
9. Đảm bảo rằng hiển thị kênh và hướng điều khiển của bạn là chính xác, khi mọi thứ được thiết lập, hình ảnh mô hình quad quad ở góc dưới bên phải sẽ di chuyển theo mọi hướng chính xác khi di chuyển cần điều khiển trên bộ điều khiển RC.
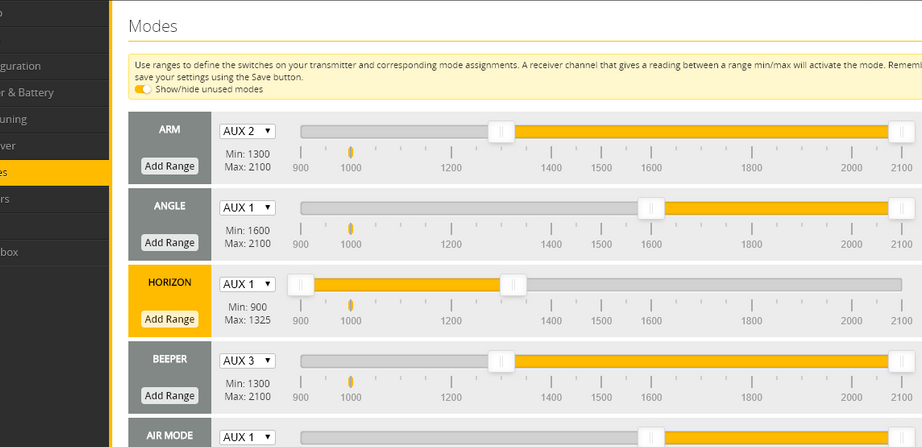
Định cấu hình các chế độ.
Bật / tắt ARM
HORIZON tự san phẳng / ACRO cho chuyến bay FPV truyền thống
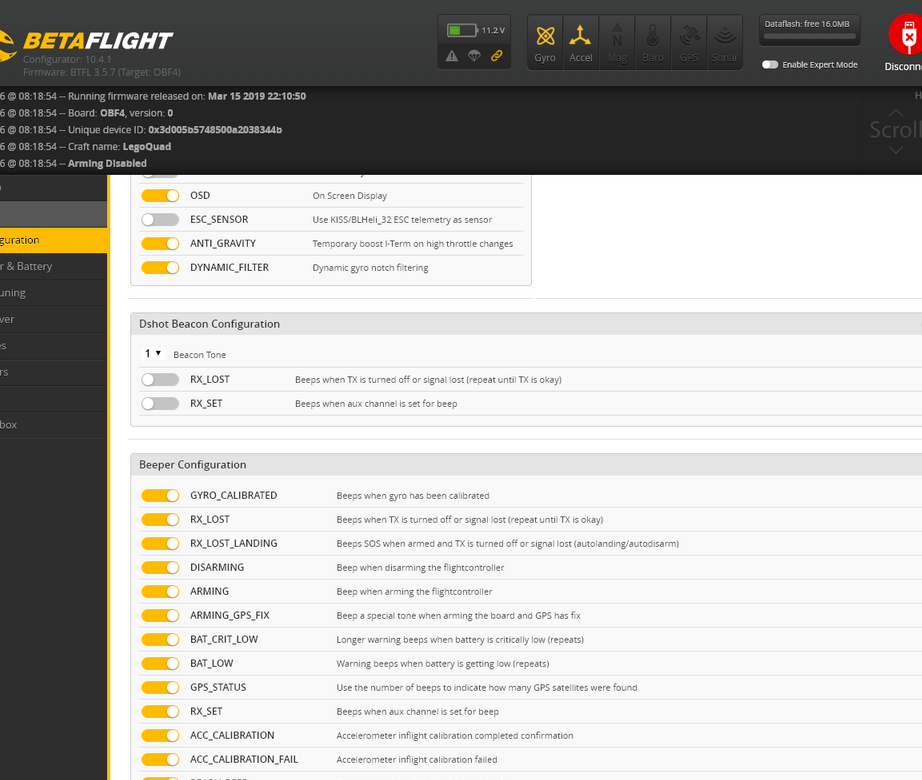
BEEPER - Hữu ích nếu bạn mất mô hình trong cỏ cao hoặc bụi rậm.
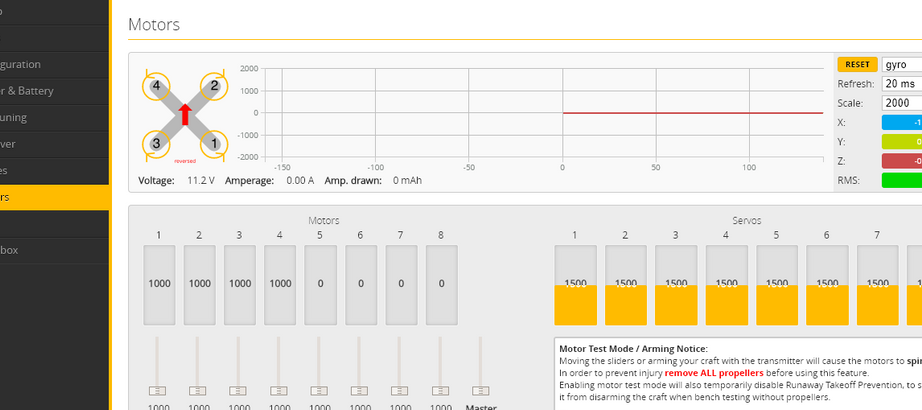
Tab Motors Motors - sử dụng tùy chọn này để kiểm tra riêng từng động cơ và quan trọng là đánh dấu hướng quay của từng động cơ
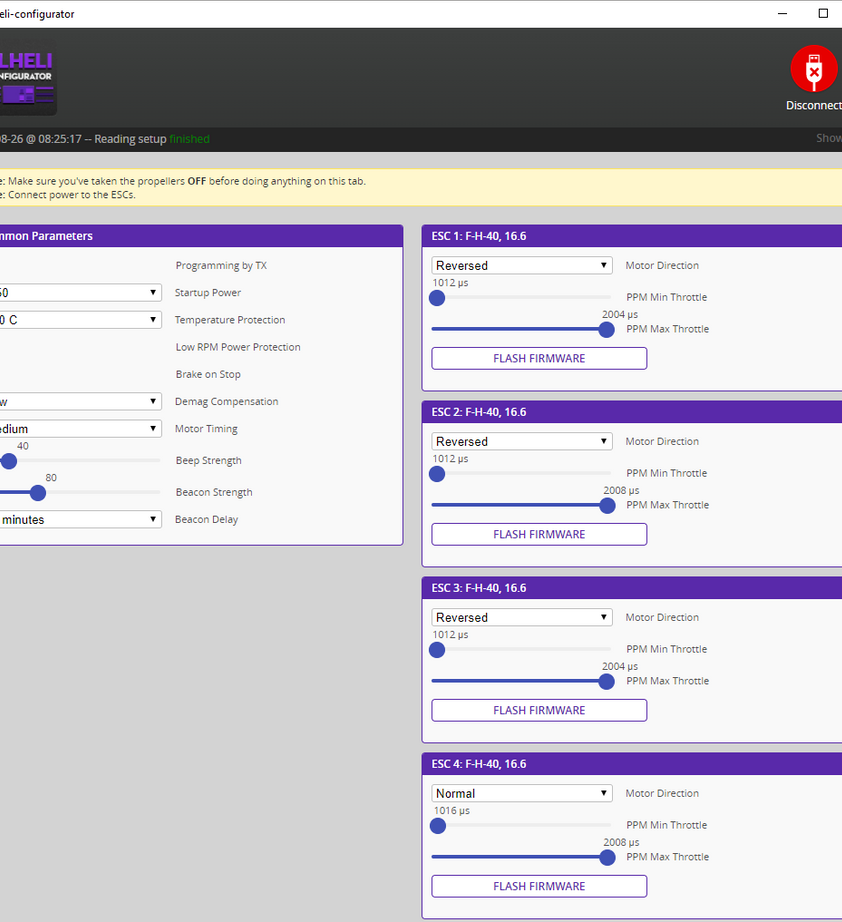
Sửa bất kỳ hướng quay sai nào với bộ cấu hình BLHELI
Sau tất cả các bước này, bạn có thể ngắt kết nối USB và pin, sau đó bật nguồn và kiểm tra xem mọi thứ có hoạt động không:
Bật máy phát và nguồn
Kết nối pin và gắn bộ tứ cực trên một mặt phẳng
Bật công tắc ARM và các động cơ sẽ bắt đầu quay với tốc độ thấp.
Kiểm tra bướm ga trong khi tăng tốc độ
Ở chế độ nằm ngang, hãy thử nghiêng bộ tứ cực và đảm bảo rằng các động cơ phản ứng thích hợp, ví dụ, nghiêng nó về phía trước và các động cơ phía trước sẽ tăng tốc.

Bước sáu: Hội nghị cuối cùng
Hầu như toàn bộ cấu trúc của vỏ được giữ bằng khóa gắn. Bậc thầy chỉ sử dụng keo nóng chảy để gắn động cơ.


Mọi thứ đã sẵn sàng và bạn có thể kiểm tra.



