

Vibrobots là như thế robotmà di chuyển do rung động. Mặc dù thực tế là thiết kế của họ khá đơn giản, nhưng họ không kém phần ấn tượng trong công việc so với những người anh em kỹ thuật tinh vi hơn. Một robot như vậy sẽ sử dụng lông làm động lực, đây là một loại chân của nó.
Robot được mô tả trong bài viết có thể độc lập thay đổi quỹ đạo chuyển động và tự nó xoay quanh chướng ngại vật. Như một thử nghiệm, tác giả đã tạo ra hai robot trên đó các nguồn năng lượng và động cơ khác nhau được lắp đặt. Về nguyên tắc, không có tiêu chuẩn nghiêm ngặt nào liên quan đến các vật liệu được sử dụng, điều chính là tuân thủ sơ đồ đã cho khi lắp ráp robot.

Vật liệu và công cụ để sản xuất:
- dây buộc nylon có kích thước 3x150mm;
- băng cách điện màu đen;
- Pin 9 Volt (6F22);
- đĩa laser (CD hoặc DVD không có sự khác biệt);
- vỏ bảo vệ;
- Đầu nối pin 9 volt;
- lập dị (xóa).

Quy trình sản xuất robot:
Bước đầu tiên. Tạo cơ sở của robot
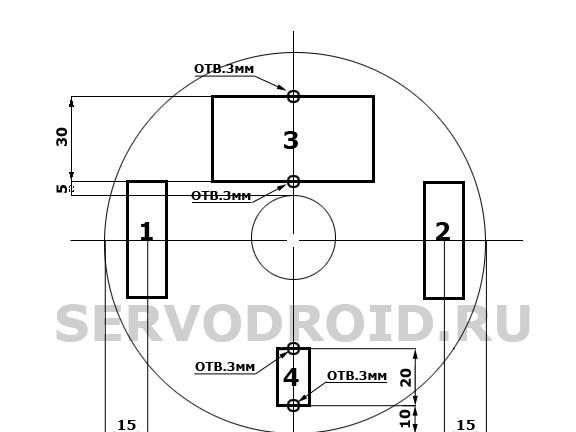
Làm cơ sở cho robot, một đĩa CD hoặc DVD thông thường sẽ được sử dụng. Tạo lỗ hổng trong nó rõ ràng theo sơ đồ, được trình bày trong ảnh. Không có ngoại lệ, tất cả các lỗ được khoan bằng mũi khoan 3 mm. Đường kính này là khá đủ khi được sử dụng để gắn quan hệ nylon. Nếu bạn quyết định sử dụng một phương pháp buộc khác, thì các lỗ có thể được khoan đến bất kỳ kích thước nào khác. Bản vẽ đề xuất phù hợp cho bất kỳ lắp ráp của robot.
Số 1 và 2 cho biết vị trí lắp đặt của bàn chải, pin được lắp vào ô vuông với số 3 và động cơ được gắn ở ô vuông 4.
Bước hai Chúng tôi thực hiện và cài đặt máy động lực
Nhờ lực đẩy, robot sẽ di chuyển. Để làm cho chúng bạn cần phải có hai bàn chải đánh răng. Tốt nhất là bàn chải giống nhau về chiều cao và hình dạng lông. Nếu hình dạng khác nhau, nó có thể được sửa bằng kéo.
Bây giờ các lông cần thiết lập hướng. Đối với điều này, băng dính được lấy và lông được bọc theo cùng một cách như được chỉ ra trong bức ảnh. Ở vị trí này, bàn chải nên được giữ trong khoảng một giờ, để lông bàn chải nhớ vị trí này. Trong ảnh, mũi tên màu xám chỉ hướng mà lông nghiêng.

Sau khi hình dạng mong muốn được thiết lập, bạn cần cắt bỏ phần có lông từ bàn chải đánh răng. Sau đó, bạn cần lấy súng bắn keo và cài đặt lông trên đĩa ở những nơi được chỉ định. Tất cả các công việc phải được thực hiện nhanh chóng và chính xác, vì keo nóng nguội nhanh và cứng lại.Bạn cần cố gắng cài đặt các bàn chải để chúng đứng song song với nhau.
Các lông của bàn chải nên được quay lại, nói cách khác, về phía pin ở mức 9 volt. Trong quá trình hoạt động, robot sẽ di chuyển ngược với hướng của lông, nghĩa là vị trí pin sẽ là mặt sau của robot.

1 - đĩa, 2 - keo nóng chảy, 3 lỗ để lắp đặt động cơ, 4 lỗ để lắp pin. Mũi tên trắng chỉ hướng của lông.
Bước ba Làm một lập dị
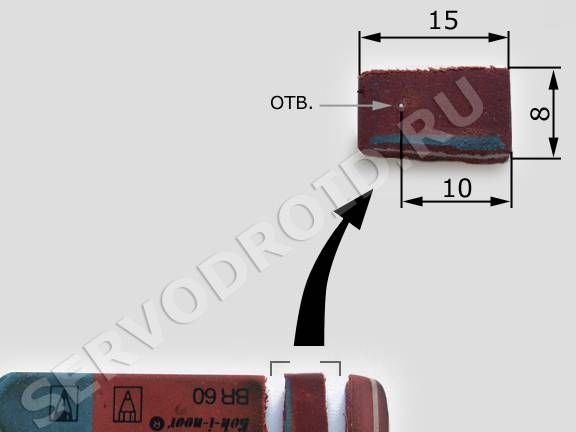
Để có được độ rung, một vật lệch tâm, tức là một vật không cân bằng, phải được đặt trên trục động cơ. Tác giả đã tạo ra một lập dị của cục tẩy bằng cách cắt ra một mảnh có kích thước phù hợp. Tạo một lỗ ở nơi được chỉ định bởi mũi tên trắng. Nó không nên lớn, vì lệch tâm sẽ trượt khỏi trục động cơ. Nó có thể được thực hiện với một cây kim.
Bước bốn Sản xuất vỏ bảo vệ.
Vì rung động được tạo ra bởi cục tẩy xoay để robot hoạt động, nên bảo vệ nơi này khỏi các vật thể khác nhau. Ngoài ra, việc bảo vệ như vậy sẽ giúp robot có cái nhìn thú vị hơn. Vỏ bảo vệ được làm bằng giấy, bao gồm nhiều lớp. Bạn cần phải làm một hình trụ bằng giấy, kích thước của nó phụ thuộc vào kích thước của động cơ. Để tạo độ cứng hơn cho giấy, nó có thể được bôi bằng keo và do đó, đặt thêm một vài lớp. Hoặc bạn có thể sử dụng các tông cho các mục đích này.
Để tạo hình dạng hình trụ, động cơ chỉ đơn giản được bọc bằng giấy trên đầu.




Bước năm Lắp ráp cuối cùng của robot
Động cơ được lắp đặt ở một nơi cụ thể và sau đó được cố định bằng một lớp ni lông. Screed như vậy có thể được mua trong các cửa hàng chuyên bán vật liệu xây dựng.
Pin cũng được gắn chính xác. Điều quan trọng là phải xem xét rằng pin phải được tập trung rõ ràng, nếu không quỹ đạo của robot có thể thay đổi. Nhân tiện, theo cách này trong tương lai, có thể thiết lập quỹ đạo của chuyển động tự làm.


Bây giờ giữa đầu nối clip và động cơ bạn cần cài đặt một công tắc nhỏ. Cuối cùng, vẫn còn kết nối đầu nối clip với pin và bạn có thể bắt đầu kiểm tra robot. Dây được kết nối bằng màu sắc.
Tuy nhiên, khi sử dụng pin Kron, không cần thiết phải cài đặt công tắc, bạn có thể bật robot bằng cách kết nối đầu nối.
Chà, đối với phiên bản thứ hai của robot, bạn chỉ cần tháo pin ra khỏi thiết bị, nhưng tất nhiên việc chuyển đổi có triển vọng hơn.
Đó là tất cả, robot đã sẵn sàng, bạn có thể bắt đầu thử nghiệm. Để đạt được kết quả mong muốn, bạn có thể cố gắng thay đổi cực tính, vì vậy động cơ sẽ quay theo hướng ngược lại, và robot sẽ hành xử khác đi.