

Pultoids được gọi là những robot như vậy có thể được điều khiển từ xa bằng điều khiển từ xa. Ví dụ, một điều khiển từ xa TV có thể được sử dụng cho các mục đích này. Nhiệm vụ chính mà tác giả tự đặt ra trong việc chế tạo một robot như vậy là sự đơn giản trong việc lắp ráp nó. Được coi là người máy không yêu cầu sản xuất bảng mạch in, cài đặt rất đơn giản và chỉ xảy ra trên các tông.

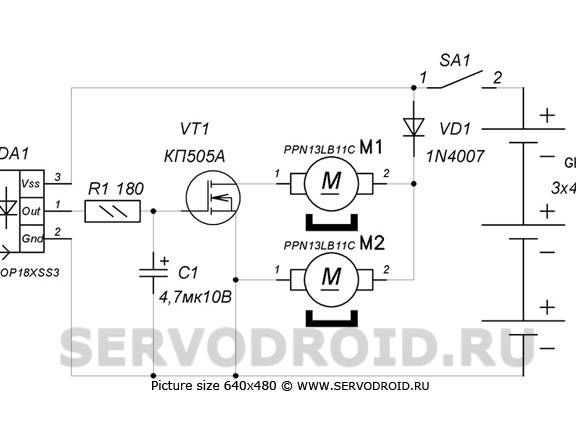
Điện tử Mạch robot chỉ bao gồm bốn thành phần: diode, bóng bán dẫn, bộ tách sóng quang và tụ điện. Để sản xuất bộ phận cơ khí, cũng cần tối thiểu vật liệu, ví dụ, CD-ROM được sử dụng để chế tạo vỏ máy.
Một robot được làm theo cách này sẽ chỉ hiểu một đội. Cần nhấn bất kỳ nút nào trên bảng điều khiển và robot sẽ bắt đầu xoay. Nếu bạn tiếp tục giữ nút, góc xoay sẽ trở nên lớn hơn, kết quả là robot có thể xoay 360 độ.
Thiết bị robot
Một đĩa compact được sử dụng làm cơ sở cho việc chế tạo robot. Đối với các yếu tố sức mạnh, chúng được gắn bằng bu lông M2. Bảng điện tử, cũng là ngăn chứa pin, được gắn bằng băng keo.
Bây giờ về các động cơ, chúng được đặt ở một góc và trục của chúng nằm trên đường. Vì vậy, không cần phải sản xuất riêng các bánh xe. Bu lông được buộc chặt bằng cách sử dụng các khung được làm bằng một đường trường.
Ba ngón tay nhỏ của pin Pin dùng cho robot, chúng được lắp đặt trong trường hợp đặc biệt. Tổng cộng, nguồn cung cấp năng lượng tạo ra 4,5 V.
Và cuối cùng, bộ tách sóng quang, nó chỉ có một ở đây, đó là loại TSOP. Nó nhận được tín hiệu điều chế từ bất kỳ điều khiển từ xa nào, nhờ đó robot có thể được điều khiển.
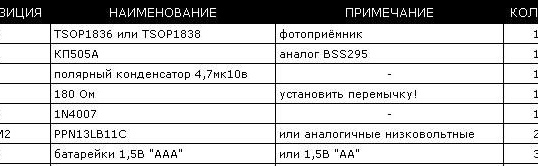
Vật liệu và công cụ để sản xuất:
- cà vạt nylon;
- Bộ tách sóng quang TSOP1836;
- bóng bán dẫn hiệu ứng trường một (KP505A);
- một đĩa nhỏ gọn;
- fular cho pin trong ba phần;
- ba pin "nhỏ";
- thước nhựa;
- ốc vít để gắn khung;
- dây và công tắc (loại chéo).
Quy trình sản xuất:
Bước đầu tiên. Thiết kế PCB
Để làm bảng mạch in, trước tiên bạn cần in một bản vẽ trên giấy. Bạn sẽ nhận được hai hình ảnh, trên một bản vẽ cài đặt, và ở phía bên kia của bảng. Tổng cộng, bảng sẽ bao gồm ba yếu tố, ở trung tâm sẽ có một tấm bìa cứng được dán bằng giấy văn phòng ở cả hai mặt. Để dán bảng, nên sử dụng keo dính khô.
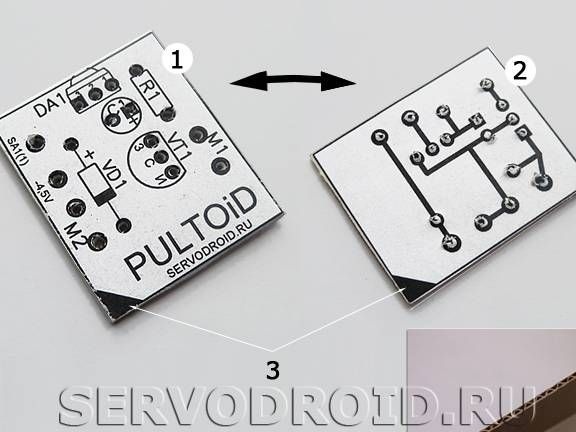
Bước hai Lắp đặt linh kiện vô tuyến
Khi cài đặt các thành phần điện tử, điều quan trọng là không quên hoặc cắt các cạnh nhô ra của các tiếp điểm. Sau đó, chúng sẽ bị uốn cong, và do đó một mạch điện sẽ được tạo ra. Tất cả các yếu tố được kết nối bằng cách hàn theo sơ đồ quy định.
Điện trở R1 trong mạch phải được thay thế bằng bất kỳ bước nhảy nào. Đối với bộ tách sóng quang, thứ tự chính xác của kết nối của nó cũng được hiển thị trong ảnh.

Bước ba Cài đặt khung điện
Để cài đặt các công cụ, bạn sẽ cần phải tạo ra một khung năng lượng. Là một vật liệu, một thước kẻ trường nhựa sẽ được sử dụng ở đây. Nó phải được cắt thành hai phần và uốn cong như được chỉ ra trong ảnh. Để làm cho thước kẻ bắt đầu uốn cong, bạn cần mang đầu sắt hàn nóng đến nơi bị lệch ở khoảng cách khoảng 2 mm. Cũng cho những mục đích này, bạn có thể sử dụng máy sấy tóc xây dựng. Thước cần phải được uốn cong một cách trơn tru đến một góc khoảng 30 độ.
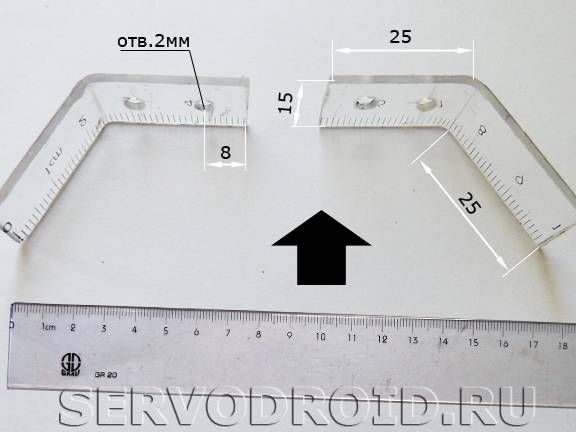

Sau khi khung được tạo, bạn có thể tiến hành cài đặt nó. Để làm điều này, lấy các ốc vít CD và 2 mm bằng đai ốc. Hơn nữa, các lỗ có đường kính ít nhất hai milimet được khoan vào đúng vị trí và khung được cố định bằng ốc vít. Để khung không bị trượt, trước khi cài đặt, bạn cần dán băng keo hai mặt vào đĩa.
Bước bốn Cài đặt hỗ trợ phía trước
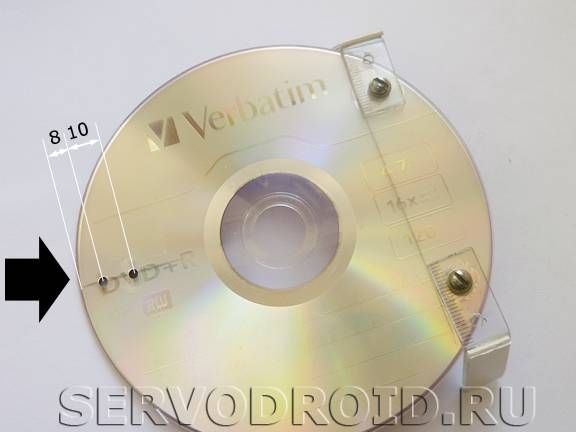
Ở phía trước của đĩa, bạn cần khoan hai lỗ và chuẩn bị một lớp ni lông. Kích thước lớp nền phải là 3x150mm. Nó phải được chèn như chỉ định trong ảnh. Do đó, hỗ trợ kết quả sẽ mất giá hoàn hảo trong quá trình hoạt động của robot và lướt dọc theo con đường.


Bước năm Lắp đặt động cơ
Để ngăn trục động cơ trượt dọc theo đường, người bảo vệ phải được đặt lên chúng. Chúng được làm từ kẹo cao su, có thể được tìm thấy trên bột nhão của bút helium. Để cài đặt các động cơ, trước tiên bạn cần dán một miếng băng keo hai mặt vào bộ phận hỗ trợ, nó sẽ chống trượt. Vâng, sau đó các động cơ cuối cùng đã được cố định với các mối quan hệ nylon.

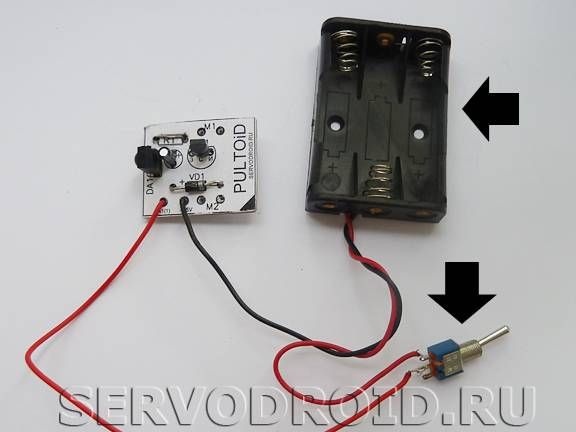
Bước sáu Chuyển đổi và kết nối cung cấp điện
Là một nguồn năng lượng, bạn có thể sử dụng bất kỳ pin nào có dòng điện không vượt quá 5 volt. Trong trường hợp này, một trường hợp được sử dụng cho pin ba ngón tay, tổng cộng 4,5 V.
Đối với công tắc, nó được gắn trên khe hở của tiếp điểm tích cực đến từ nguồn điện. Dây màu đỏ được gắn vào bảng để ghim SA1 (1) và dây màu đen vào chân -4,5V.


Cũng trong giai đoạn này, bạn có thể kết nối các động cơ, dây của chúng được kết nối với các tiếp điểm M1 và M2.
Bước thứ bảy. Giai đoạn cuối
Ở giai đoạn cuối, tất cả các yếu tố điện tử cần phải được sửa chữa. Chúng được gắn vào đĩa bằng băng dính hai mặt. Đối với công tắc, nó cũng cần phải được sửa chữa, vì điều này bạn có thể sử dụng keo nóng.

Đó là tất cả, bây giờ robot đã sẵn sàng. Bạn có thể thử bật nó lên và ra lệnh bật bằng bất kỳ điều khiển từ xa nào.