
Điểm đặc biệt của robot BIBOT-1 là nó có thể thực hiện hai nhiệm vụ. Nó có thể di chuyển phía sau một nguồn sáng hoặc dọc theo một đường màu đen có thể được vẽ trên giấy. Robot rất linh hoạt trong cài đặt, nghĩa là sau này sẽ có thể điều chỉnh nó theo bất kỳ điều kiện mong muốn nào, nghĩa là làm cho nó nhạy hơn với ánh sáng hoặc ít hơn. Cũng có thể điều chỉnh tốc độ quay của động cơ, điều này sẽ cho phép robot hoạt động tốt hơn, đặc biệt là khi di chuyển dọc theo đường.

Thiết bị và nguyên lý của robot:
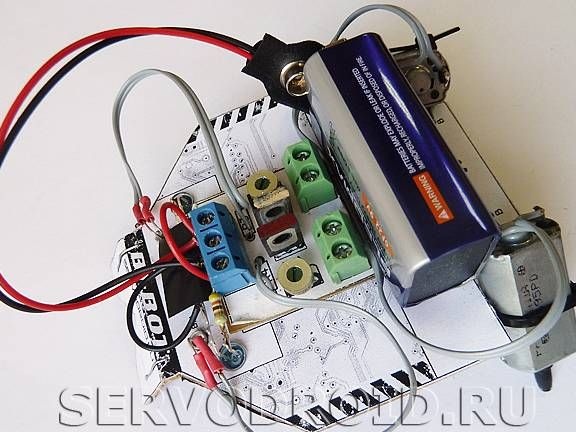
Đế của robot được làm bằng bìa cứng, mẫu được in trên máy in và sau đó gặp sự cố. Đối với mô-đun của các thành phần vô tuyến, một textolite được lấy làm cơ sở của nó, mô-đun được gắn vào đế của robot. Để làm cho cơ thể cứng hơn, xương sườn đặc biệt được sử dụng trong thiết kế.
Động cơ được cài đặt như trong hầu hết các tự làm, đó là, ở một góc độ. Do đó, không cần phải đặt bánh xe và hộp số. Để ngăn các trục trượt trên bề mặt, các tấm bảo vệ được đặt trên chúng.
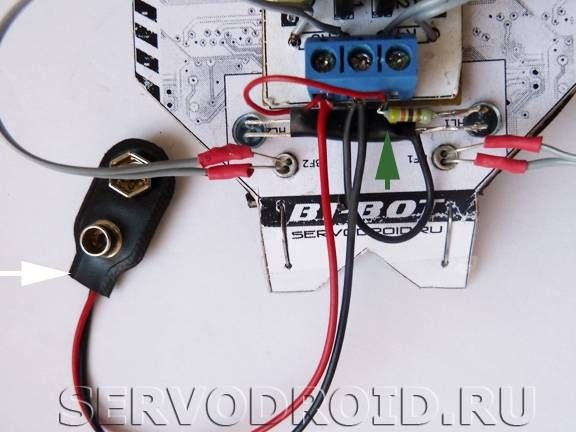
Pin 6V22 loại 9V được sử dụng làm nguồn điện. Pin được gắn với băng và luôn có sẵn để thay thế dễ dàng.
Đối với chuyển đổi, sau đó tự động quyết định tránh cài đặt nó Robot bật và tắt bằng cách thao tác kẹp gắn vào pin.
Và cuối cùng là sự điều chỉnh của robot. Để điều chỉnh độ nhạy của robot, hệ thống có hai điện trở điều chỉnh. Khi chúng quay, bạn có thể điều chỉnh độ nhạy của robot với ánh sáng, và bạn cũng có thể điều chỉnh tốc độ quay của động cơ. Robot càng nhạy cảm với ánh sáng, nó sẽ di chuyển càng nhanh và ngược lại.
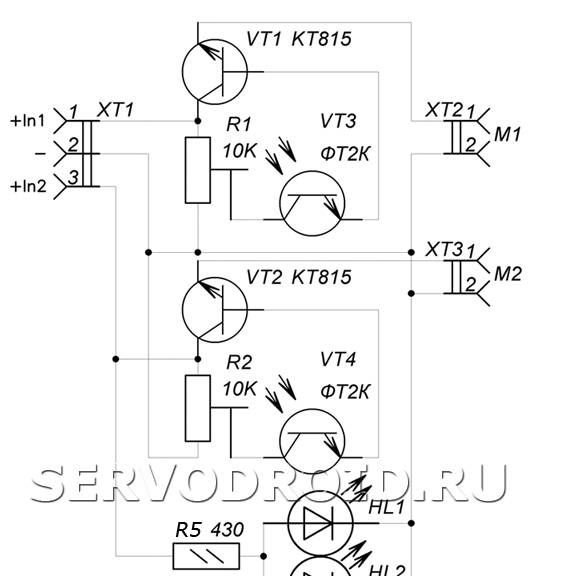
Đối với nguyên tắc hoạt động, mọi thứ được quy định trong sơ đồ.
Vật liệu và dụng cụ:
- Pin 9V và clip để kết nối;
- hai đầu nối để kết nối động cơ (khối đầu cuối hai phần);
- động cơ;
- lớp ni lông;
- bảo vệ (con lăn cao su);
- hai phototransistors;
- hai đèn LED hồng ngoại;
- một khung từ một kim bấm;
- khối thiết bị đầu cuối ba phần để kết nối cung cấp điện;
- điều chỉnh điện trở.

Quy trình sản xuất:
Bước đầu tiên. Thiết kế PCB
Lệ phí được tạo ra bằng phương pháp LUT. Trước khi làm việc, bề mặt của sợi thủy tinh phải được làm sạch hoàn toàn, sau đó rửa sạch và sấy khô hoàn toàn. Sau khi sản xuất, các rãnh dẫn phải được kiểm tra bằng đồng hồ vạn năng cho ngắn mạch.
Bước hai Cài đặt điện tử yếu tố
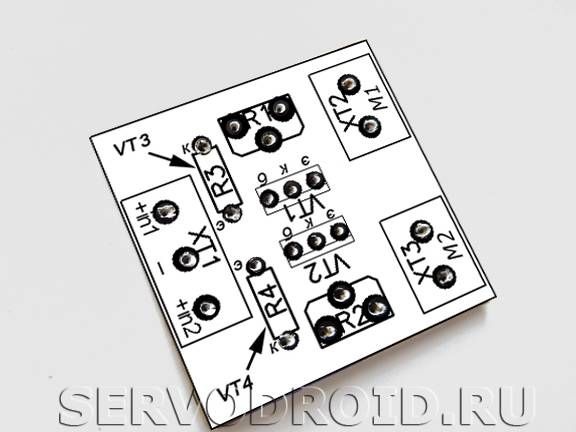
Tiếp theo, bạn cần lấy một bản vẽ được in trên giấy và dán nó lên bảng đã tạo. Trong trường hợp này, các lỗ trên giấy và trong PCB phải khớp chính xác. Tiếp theo, các thành phần vô tuyến được cài đặt như được chỉ ra trong sơ đồ. Trong quá trình làm việc, việc cài đặt điện trở R3, R4 cần cài đặt phototransistors VT3, VT4.
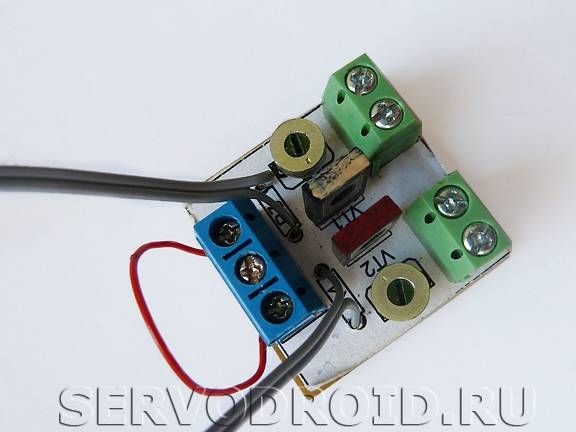
Các phần cực của khối đầu cuối ba phần XT1 phải được kết nối bằng dây gắn. Các điểm kết nối của các tiếp điểm cần được cách nhiệt tốt, tốt nhất là sử dụng ống co nhiệt cho các mục đích này.
Bước ba Cách tạo vỏ
Một bản vẽ của cơ thể phải được in trên một tờ giấy A4 thông thường. Tiếp theo, bạn cần lấy một miếng bìa cứng và dán một hình vẽ lên nó, sau đó vỏ phải được cắt xung quanh chu vi.
Trong trường hợp chữ tượng hình "kéo" nằm dọc theo các đường in đậm, nên cắt. Sau đó, dọc theo các đường chấm màu đen, bạn cần uốn cong các tông như trong ảnh và đặt các mũi tên màu đen.



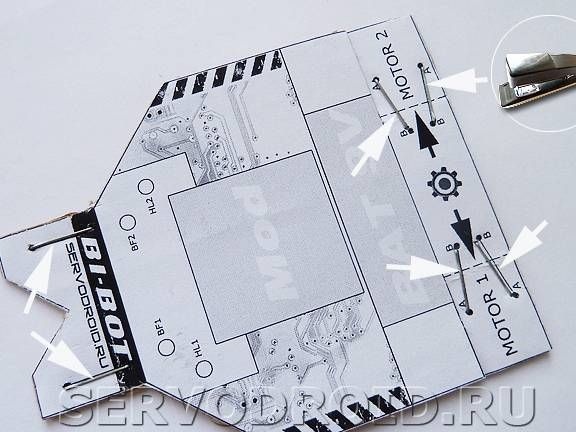


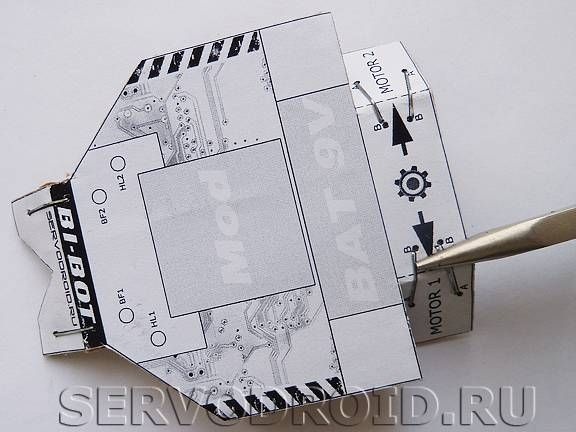
Mặt trước và mặt sau của vỏ đến vị trí đã chỉ định bằng cách sử dụng kim bấm, bạn cần cài đặt giá đỡ. Nơi cài đặt của họ được đánh dấu bằng các đường màu đen với các vòng tròn. Staples là cần thiết để làm cho khung cứng hơn. Sau khi cài đặt dấu ngoặc, chúng rất tẻ nhạt để uốn dọc theo các đường gấp.
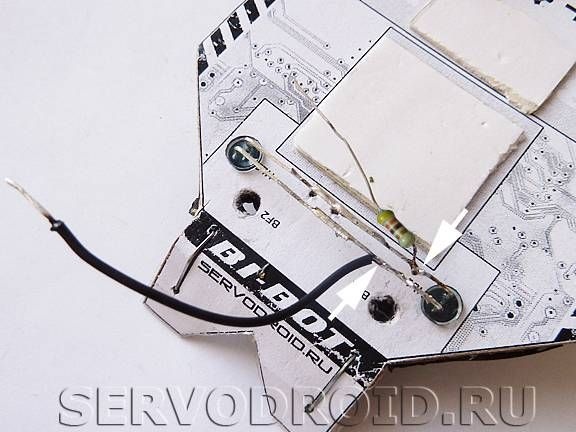
Ở những nơi được đánh dấu BF1, BF2, bạn cần tạo lỗ để cài đặt phototransistors. Ở những nơi HL1, HL2, bạn cần tạo ra những lỗ có kích thước sao cho vừa với đường kính vỏ của đèn LED hồng ngoại.
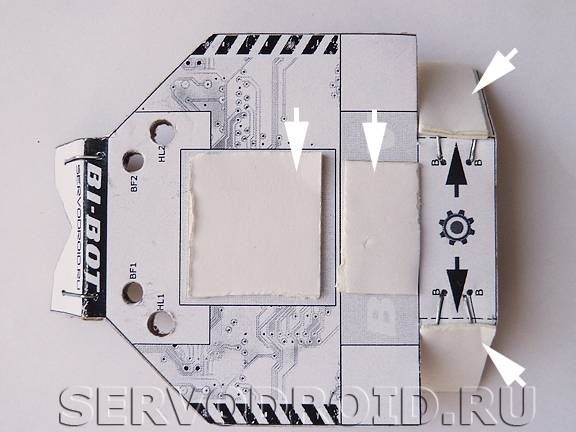
Ở những nơi được chỉ định là Mod "," BAT 9V "và" ĐỘNG CƠ 1 "," ĐỘNG CƠ 2 "dán các dải băng keo hai mặt.
Bước bốn Lắp đặt động cơ
Động cơ được gắn ở vị trí với các mối quan hệ nylon. Để tránh trục bị trượt, chúng phải được đeo với các tấm bảo vệ. Chúng được làm bằng dây cao su, nằm trong thanh helium của bút. Ở cùng một giai đoạn, hàn các dây với động cơ.


Bước năm Lắp đặt đèn LED hồng ngoại
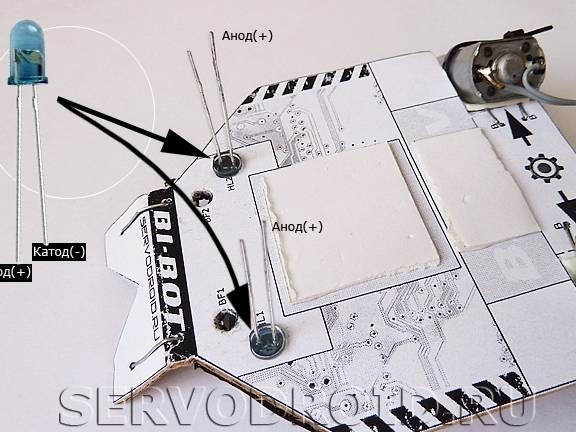
Khi lắp đặt đèn LED hồng ngoại, điều quan trọng là không nhầm lẫn kết luận của chúng, đối với các phần tử được nhập, một tiếp điểm dài là cực dương, đó là một điểm cộng. Đèn LED được lắp đặt tại các vị trí HL1, HL2 như trong ảnh. Các phát hiện được uốn cong để các điốt có thể được kết nối song song.
Một điện trở 430 ohm phải được hàn vào tiếp điểm dương của đèn LED và dây màu đen với tiếp điểm âm.
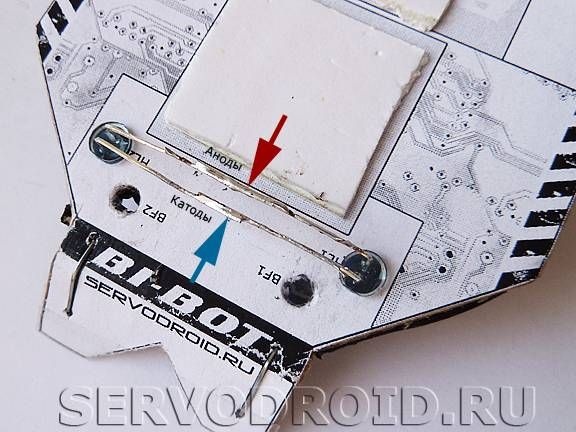
Đầu kia của dây đen phải được kết nối với chân giữa của khối đầu cực ba phần. Đối với đầu ra của điện trở, nó được kết nối với đầu cuối của khối đầu cuối.
Bước sáu Giai đoạn xây dựng cuối cùng
Để robot di chuyển dọc theo đường dây, các phototransistors được đặt vào vị trí BF1, BF2 như trong ảnh.
Các bóng bán dẫn cho chuyển động phía sau nguồn sáng được đặt ở phía sau.
Để kết luận, các động cơ được kết nối, và pin được đặt.


Đó là tất cả, robot đã sẵn sàng. Bây giờ bạn có thể thử bật nó và cấu hình nó với các điều kiện mong muốn.