

Trong video bạn có thể thấy cách robot hoạt động. Nó dần thay đổi màu sắc trong quá trình hoạt động.

Vật liệu và công cụ để lắp ráp robot:
- Giá đỡ hình chữ U;
- bốn pin 1.544 LR44 mỗi pin;
- RGB-LED nhiều màu với chức năng chuyển mạch;
- ống cách điện;
- chốt đẩy thép;
- loại động cơ điện áp thấp RF-300CA;
- nút bật robot (có hai dây dẫn);
- dây để kết nối động cơ;
- đèn LED báo động nhấp nháy.
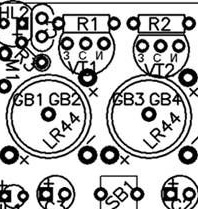

Về sự cần thiết điện tử các yếu tố, chúng được hiển thị trong hình. Bảng mạch in được làm bằng một tấm giấy bạc PCB, kích thước của nó chỉ 30X30 mm. Tác giả cũng khuyến nghị sử dụng các tụ điện cực nhỏ để lắp ráp.
Quy trình sản xuất robot
Bước đầu tiên. Sơ đồ của robot
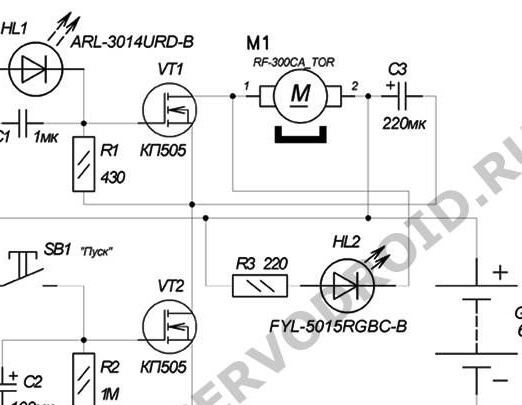
Các mạch robot có thể được nhìn thấy trong hình. Sau khi lắp pin, robot ở trạng thái tắt, để bật pin, nhấn nút SB1. Ngay sau đó, tụ điện C2 được sạc ngay lập tức. Các tấm dương từ tụ điện được kết nối với cổng của bóng bán dẫn hiệu ứng trường VT2. Về vấn đề này, khi đạt đến ngưỡng chuyển đổi, điện trở của kênh nguồn thoát của kênh này sẽ giảm ngay lập tức và một điện tích tiềm năng âm hình thành ở cống. Vâng, những gì xảy ra tiếp theo có thể được nhìn thấy chi tiết hơn trong sơ đồ.
Bước hai Đèn LED gắn kết RGB
Đèn LED dưới số 1 được gắn trên bảng mạch in. Trong bản vẽ, vị trí này được gọi là HL2. Sau khi đèn LED được lắp đặt, các kết luận của nó phải được uốn cong để đèn LED được hướng sang một bên. Do đó, trong quá trình hoạt động, đèn LED sẽ sáng không lên, mà sang một bên, chiếu sáng các bức tường. Hướng nào ánh sáng sẽ chiếu sáng được chỉ định bởi một mũi tên màu đen.

Bước ba Chân đế gắn pin
Để cung cấp liên lạc giữa pin và robot, chân đẩy được sử dụng.Một nút được cài đặt ở trung tâm, trong sơ đồ, nó được đánh dấu là GB1, GB2 và nút thứ hai được đặt ở vị trí GB3, GB4. Để sửa chữa an toàn các tiếp điểm, các nút được hàn với một lượng lớn vật hàn.


Pin được lắp đặt trên nút kim loại dưới số 3. Pin được cố định bằng dây buộc hình chữ U, trên đó cách điện từ các ống được đeo. Phần trên của giá đỡ cần được uốn cong nhẹ với một vòng cung hướng xuống, điều này sẽ cho phép các pin được nhấn vào tiếp điểm thấp hơn. Các ống cách điện là cần thiết để các mặt thẳng đứng của pin không tiếp xúc với các ống nằm ngang.
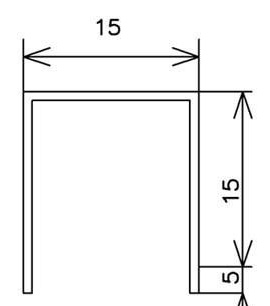
Để làm dây buộc hình chữ U, bạn cần sử dụng hai kẹp giấy. Chúng cần được uốn thành hình chữ U, như được chỉ ra trong bản vẽ. Bất kỳ ống có thể được sử dụng, polyvinyl clorua được sử dụng ở đây. Chiều cao của chúng phải bằng chiều cao của pin.
Cài đặt khung bằng cách hàn, đối với điều này, bạn cần phải tin vào đầu của nó. Để đóng hộp, cần phải sử dụng từ thông trung tính, không rửa.
Bước bốn Lắp đặt động cơ
Động cơ được lắp đặt ở phía bên của bảng nơi đường ray đi qua, nó được đặt với trục xuống. Để gắn chặt động cơ, bạn có thể sử dụng keo nóng hoặc băng keo hai mặt. Nhưng trước khi bạn gắn chặt động cơ, bạn cần kết nối nó và kiểm tra toàn bộ hệ thống để biết khả năng hoạt động.

Bước năm Cài đặt và thử nghiệm tự làm
Sau khi lắp ráp robot, bạn có thể kiểm tra và cấu hình. Để làm điều này, bạn cần cài đặt pin trong robot, chúng được cài đặt thay cho GB1, GB2 và GB3, GB4. Trong trường hợp này, các thiết bị điện tử phải ở trạng thái tắt. Sau khi cài đặt pin, robot có thể được bật, điều này được thực hiện bằng nút SB1. Sau khi nhấn nó, động cơ sẽ bắt đầu hoạt động, đèn LED HL1 sẽ nhấp nháy và đèn LED RGB cũng sẽ sáng lên.
Sau một thời gian, robot sẽ tự động tắt, nó sẽ dừng lại và tất cả các điốt sẽ tắt. Sau đó, nó được bật theo cách tương tự như lần đầu tiên, bằng cách nhấn một nút.

Để điều chỉnh thời gian của robot, bạn cần thử nghiệm các giá trị của điện trở R2 và tụ điện C2, chúng chịu trách nhiệm cho chức năng này. Nếu bạn cần thiết lập hoạt động tối đa của robot, thì điện dung của tụ điện phải càng lớn càng tốt. Theo cách đơn giản như vậy, bạn có thể lắp ráp một robot thú vị như vậy.