
Cái này người máy điều khiển bằng điện thoại thông minh bluetooth. Gia tốc kế của điện thoại thông minh đo góc của điện thoại sang trái / phải, lên / xuống, sử dụng dữ liệu này để tính tốc độ của động cơ định hướng, dữ liệu được truyền qua Bluetooth để Arduino
Những gì bạn cần để xây dựng một robot.
Arduino uno, Mô-đun Bluetooth HC-06, hai động cơ hộp số 300 RPM 12 v, Bộ điều khiển động cơ cầu H-cầu L298N Dual H
12 đến 1,3 Một pin axit chì. Mỗi động cơ tiêu thụ 0,4A, cộng với mức tiêu thụ logic của trình điều khiển. Dây Arduino, pin 9v thông thường và đầu nối để kết nối pin với Arduino. Dây điện để kết nối trình điều khiển động cơ điện. Cáp USB. Điện thoại với Android phiên bản 4 trở lên. 4 bánh xe cao su 50mm xoay từ Vítfix hoặc Toolstation; Hai trung tâm phổ quát Lynxmotion HUB-02.










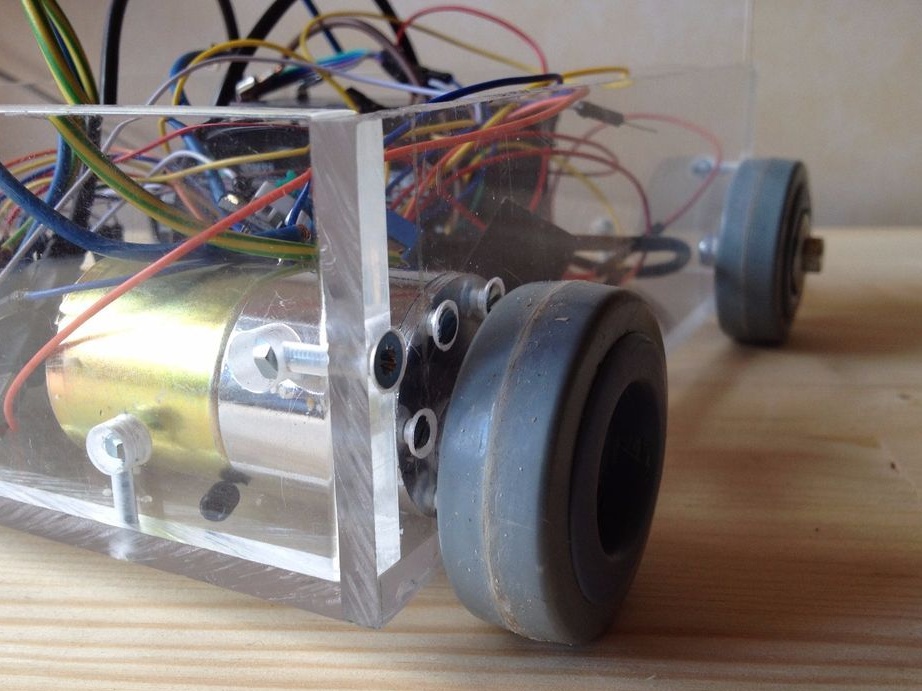
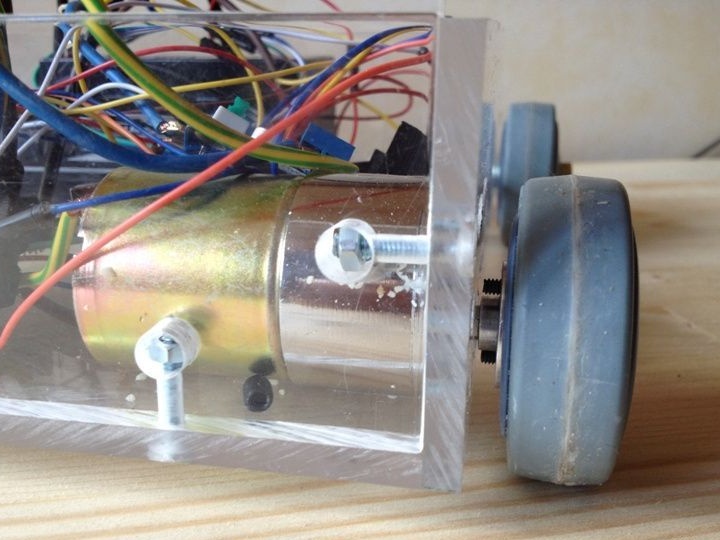
Vỏ được lắp ráp từ nhựa dài 22 cm và rộng 17 cm. Hai động cơ phải được kết nối với trục và được bảo đảm bằng một chốt ren.
Bánh trước
Cao su được lấy ra khỏi các con lăn và hai lỗ được khoan vào chúng theo các lỗ trên các trục. Các trục được cố định trên các trục đi qua vỏ bằng các chân ren. Sau đó, các con lăn được cố định trên các trục và cao su được đặt trên chúng.
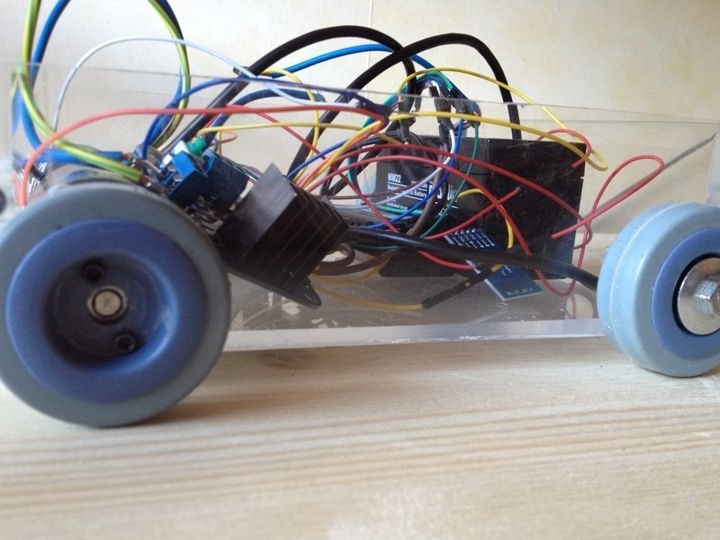
Bánh sau
Các bánh xe phía sau chỉ đơn giản là được tháo ra khỏi bản lề và được bảo đảm thông qua các lỗ khoan trong nhà ở.
Kết nối điện.
Sẽ có vấn đề khi tải mã chương trình trong Arduino. Điều này là do mô-đun Bluetooth, các tiếp điểm RX \ TX của nó, được kết nối với các chân Arduino 1 và 2, cũng được sử dụng để truyền dữ liệu qua USB. Cần phải thay đổi danh bạ 1 và 2 thành 11 và 12 trong thư viện được kết nối, sẽ được sử dụng để truyền dữ liệu.
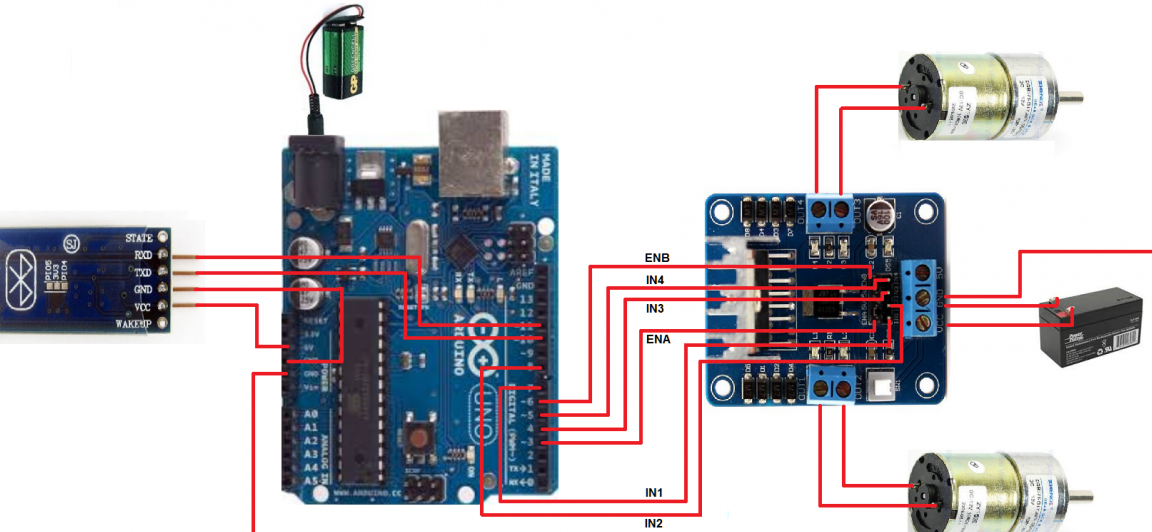
Trình điều khiển động cơ không cần một nguồn cung cấp năng lượng riêng cho logic. 12V là đủ để cung cấp năng lượng cho logic trình điều khiển và động cơ chính nó. Điểm trừ của pin nên được kết nối với cả Arduino và trình điều khiển động cơ. Các tiếp điểm điều khiển động cơ ECA / 5V và ENB / 5V có thể được nhảy. Nó phải được gỡ bỏ trước khi kết nối với Arduino. Không có gì nên được kết nối với hai chân 5V.
Mã Android.
Tệp đính kèm phải được giải nén và nhập vào Android Studio, đóng gói trong apk và cài đặt trên điện thoại.
Các tệp chính:
Hoạt động của các thiết bị được ghép nối:
deviceList.java
Activity_device_list.xml
Hoạt động điều khiển LED và chuyển động:
ledControl.java
Activity_led_control.xml
Bản kê khai:
AndroidManifest.xml
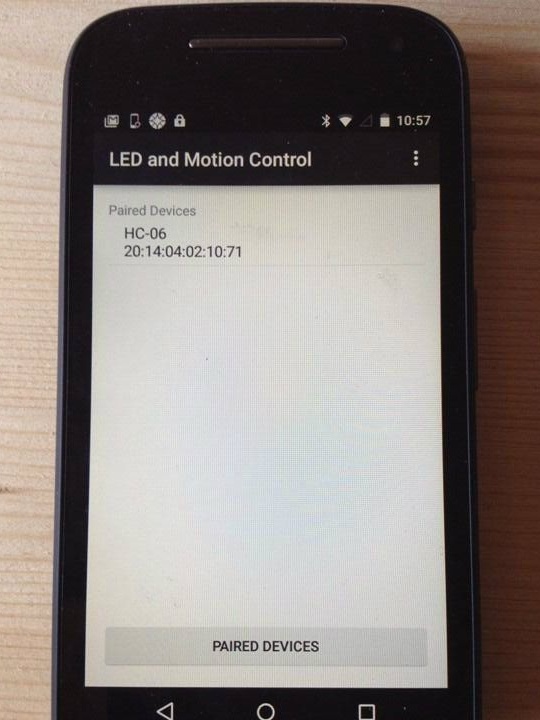
Hoạt động của các thiết bị được ghép nối hiển thị các thiết bị Bluetooth có sẵn. Ngay khi các thiết bị được kết nối, điều khiển sẽ được chuyển sang LED và Hoạt động điều khiển chuyển động.
Các nút bật / tắt gửi một tin nhắn trên hệ thống điều khiển trên máy tính hoặc trên một chiếc Arduino, bật hoặc tắt đèn LED tích hợp. Máy đo gia tốc điện thoại, truyền các giá trị x / y từ cảm biến, mỗi khi các giá trị này thay đổi, sẽ điều khiển chuyển động. Dựa trên điều này, Arduino tính toán tốc độ và hướng quay của động cơ trong phạm vi từ 0 đến 255. Nó truyền các giá trị Arduino này dưới dạng 'L-255:' hoặc 'R100', v.v. Dựa trên điều này, Arduino gửi các lệnh tốc độ quay của động cơ bên trái đến ENA, bên phải sang ENB và thay đổi hướng quay bằng cách thay đổi cực tính thành IN1, IN2 cho bên trái, N3 và N4 cho động cơ bên phải.