


Tôi đã tham gia thiết kế của mình từ hướng dẫn lắp ráp cho Lego Technic 42049 và Lego Technic 42041. Phần còn lại là sự ngẫu hứng của tôi. Để kiểm soát, tôi sẽ sử dụng mô-đun Bluetooth được liên kết với thiết bị hoặc máy tính Android. Vì vậy, chúng tôi cần:
- Kỹ thuật Lego 42029
- Kỹ thuật Lego 42033
- Arduino Pro Mini 5v AT Mega 328
- Trình điều khiển động cơ L9110S
- 1 ổ servo SG-90
- Mô-đun Bluetooth HC-05 hoặc tương đương
- USB-UART cho phần mềm arduino
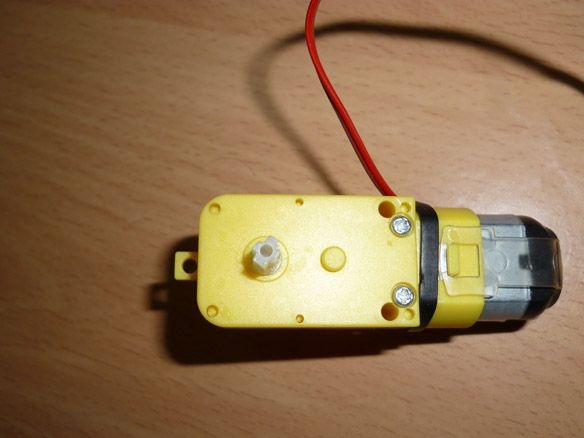
- Hộp số động cơ 6v 1: 150 100 vòng / phút
- 2 đèn LED
- 2 điện trở 150 ohms
- Tụ 10v 1000uF
- 2 lược chải đơn PLS-40
- Cuộn cảm 68mkGn
- 6 pin NI-Mn 1.2v 1000mA
- Nối cha-mẹ hai pin vào dây
- Homutik
- Dây điện có màu khác nhau.
- hàn
- Rosin
- hàn sắt
- Bu lông 3x20, đai ốc và vòng đệm cho chúng
- Bu lông 3x40
- Bu lông 3x60
Bước 1 Lắp ráp trục sau
Di chuyển tiến - lùi sẽ được thực hiện bởi một động cơ bánh răng với động cơ 6V, tỷ số truyền 1: 150 và tốc độ không tải 100 vòng / phút. Bạn có thể thử tỷ lệ thiết bị khác, nhưng, theo tôi, điều này là tối ưu. Trục hộp số ở cả hai bên phải được khắc theo hình chữ thập và đưa vào chi tiết lego:
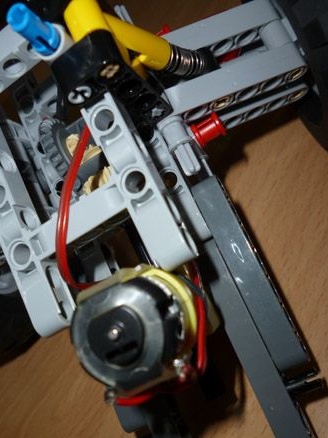
Tiếp theo, chúng tôi thu thập cơ sở của trục sau theo hướng dẫn của Lego 42029 phần 1, bắt đầu từ 3 trang đến 8. Và thêm một vài chi tiết để bạn có thể cài đặt động cơ và hộp số.
Xem tập tin trực tuyến:
Xem tập tin trực tuyến:



Bước 2 Lắp ráp trục trước
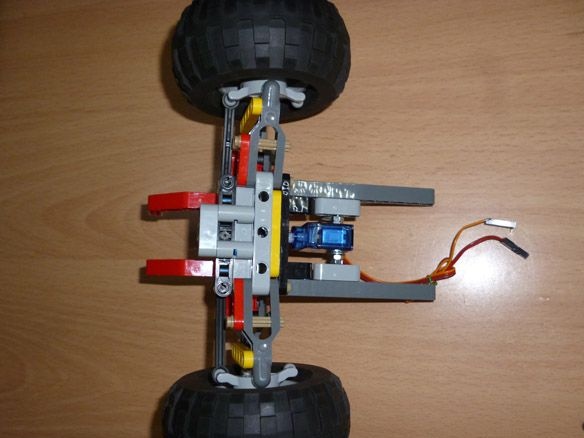
Chúng tôi lắp ráp phần trước của hệ thống treo theo hướng dẫn của Lego 42029 phần 1, từ trang 21 đến 23. Chúng tôi lấy hình thang từ phần thứ hai của Lego từ trang 6 đến 11. Servo SG-90 rất phù hợp để xoay bánh xe. Để sửa nó trên mô hình của chúng tôi, cần phải khoan cẩn thận, để không chạm vào các bộ phận bên trong của servo, một lỗ xuyên qua có đường kính 3,2 mm hoặc chỉ cần cắt nó bằng dao văn phòng phẩm. Và cũng cắt bỏ những phần nhô ra (cánh sập để buộc chặt). Chúng tôi chèn một bu lông vào lỗ được làm và cố định nó bằng đai ốc. Trên trục servo, chúng tôi đặt một đòn bẩy với bộ phận bắt vít từ lego:





Bước 3 Lắp ráp chân đế và taxi
Chúng tôi kết nối cả hai cây cầu như trong ảnh:
Chúng tôi lắp ráp cabin theo hướng dẫn của Lego 42041. Bắt đầu từ trang 39 đến 47 của phần đầu tiên. Hơn nữa từ trang 5 đến 28 của phần thứ hai. Cũng như phần bội trên trang 38 đến 43 của phần thứ hai của hướng dẫn.
Xem tập tin trực tuyến:
Xem tập tin trực tuyến:


Xem tập tin trực tuyến:
Xem tập tin trực tuyến:
Bước 4 Điện
Để kiểm soát, chúng tôi sẽ sử dụng Arduino Pro Mini và mô-đun Bluetooth. Pro Mini có thể được thay thế bằng bất kỳ bo mạch Arduino nào khác. Tôi đã chọn Pro Mini, vì vậy nó là nhỏ nhất. Trình điều khiển động cơ là cần thiết để kết nối động cơ.
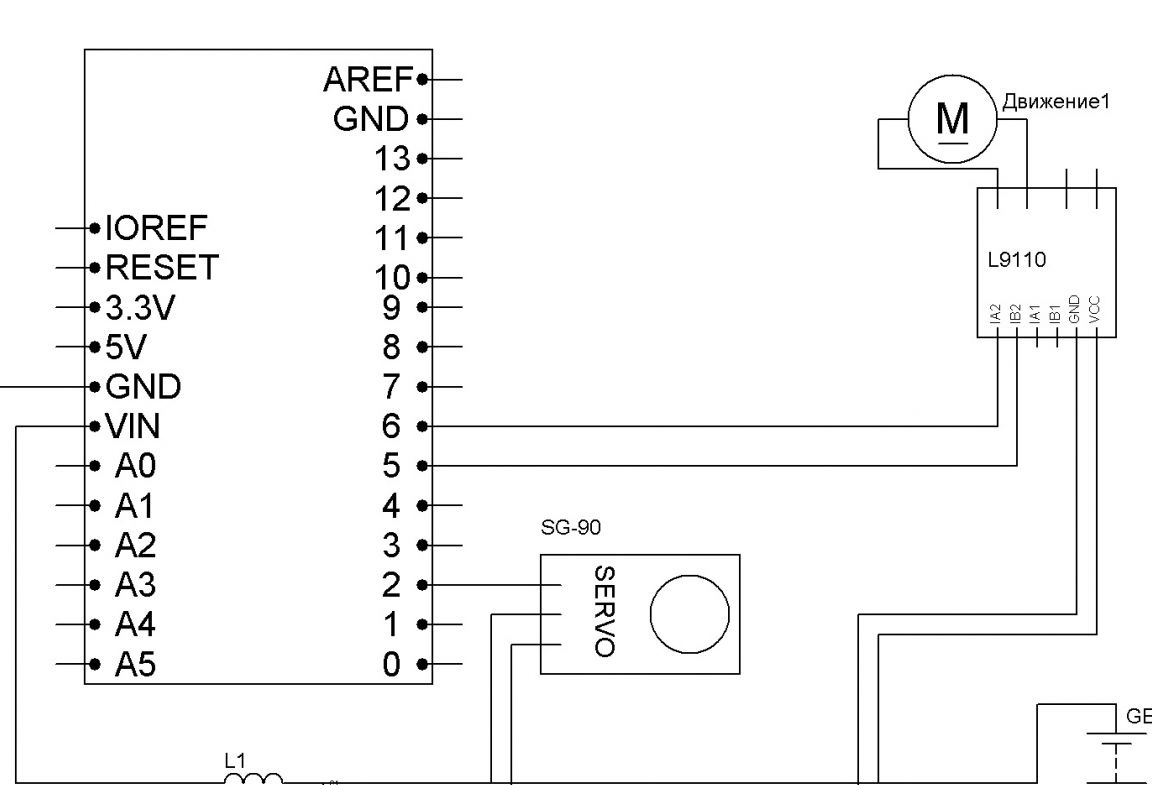
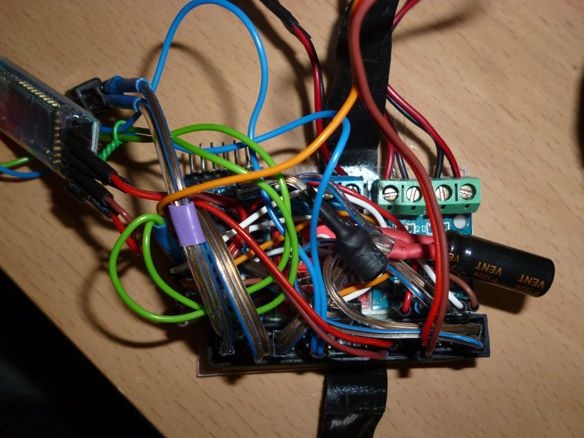
Kết nối tất cả các thành phần với dây mẹ-mẹ Dupont. Nguồn - 6 pin NI-Mn 1.2v 1000mA được kết nối nối tiếp. Một tụ điện của bất kỳ công suất thấp, một cuộn cảm cũng bạn sẽ tìm thấy, bạn cần ổn định sức mạnh của vi điều khiển. Cực dương của hai đèn LED được kết nối với arduino 4 pin, cực âm đến GND. Các điện trở được chọn cho các đèn LED được sử dụng. Để thuận tiện, cuộn pin bằng băng keo.

Chúng tôi dán tất cả vào một băng keo hai mặt trên cơ sở:
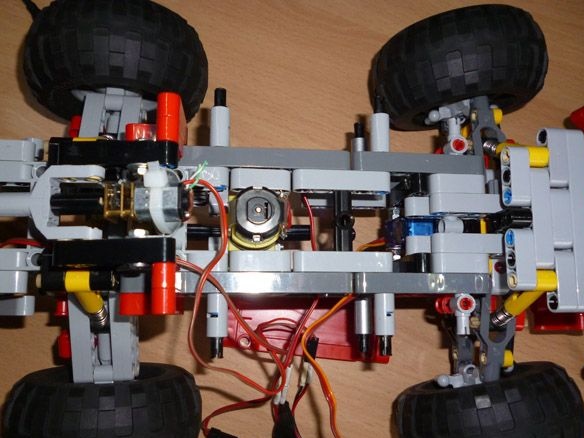
Chúng tôi đặt thợ điện của chúng tôi giữa các bánh xe và đóng:
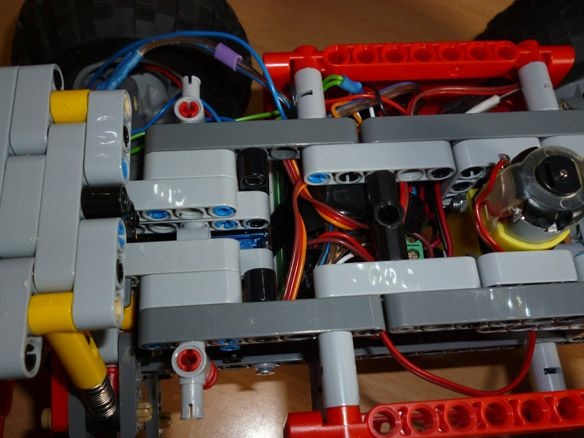
Thêm một vài nét:


Bước 5 Cài đặt Bluetooth
Các mô-đun Bluetooth giá cả phải chăng nhất hiện nay là HC-05 và HC-06. Chúng có rất nhiều trong các cửa hàng trực tuyến của Trung Quốc. Sự khác biệt giữa chúng là cái đầu tiên có thể hoạt động cả ở chế độ chủ (nô lệ) và ở chế độ nô lệ (chính). Thứ hai là một thiết bị nô lệ hoàn toàn. Nói cách khác, HC-06 không thể phát hiện một thiết bị được ghép nối và thiết lập kết nối với nó, nó chỉ có thể tuân theo chủ.
Đặc điểm tóm tắt của các mô-đun:
- Chip Bluetooth - BC417143 được sản xuất bởi
- Giao thức truyền thông - Thông số kỹ thuật Bluetooth v2.0 + EDR;
- bán kính hành động - lên tới 10 mét (mức năng lượng 2);
- Tương thích với tất cả các bộ điều hợp Bluetooth hỗ trợ SPP;
- Dung lượng bộ nhớ flash (để lưu phần sụn và cài đặt) - 8 Mbit;
- tần số của tín hiệu radio - 2,40 .. 2,48 GHz;
- giao diện máy chủ - USB 1.1 / 2.0 hoặc UART;
- tiêu thụ điện năng - dòng điện trong quá trình giao tiếp là 30-40 mA. Giá trị hiện tại trung bình là khoảng 25 mA. Sau khi kết nối được thiết lập, mức tiêu thụ hiện tại là 8 mA. Không có chế độ ngủ.
Thông thường, các mô-đun được bán như hai bảng hàn với nhau. Cái nhỏ hơn là một mô-đun nhà máy, được sử dụng rộng rãi trong nhiều điện tử thiết bị. Lớn - một bánh mì đặc biệt cho DIY.
Đây là mô-đun DIY HC-05 và HC-06 trông như thế nào:
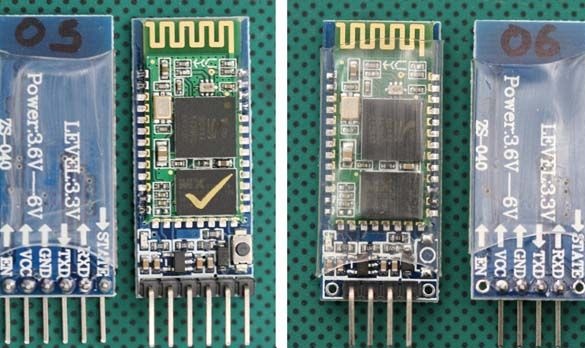
Về nguyên tắc, bạn có thể sử dụng bất kỳ mô-đun nào bạn thích. Một mô-đun không có bảng điều khiển có chi phí ít hơn, nhưng sau đó bạn sẽ phải chăm sóc nguồn điện 3,3 V cho mô-đun và tự hành hạ mình bằng cách hàn dây vào mô-đun. Tôi đã chọn tối ưu, theo ý kiến của tôi, trong tỷ lệ giá / chức năng HC-06.
Chúng tôi kết nối như sau:
Arduino Pro Mini - Bluetooth
D7 - RX
D8 - TX
5V - VCC
GNDTHGND
Để hoạt động đúng, mô-đun phải được cấu hình. Chúng tôi sẽ cấu hình các lệnh AT được nhập vào cửa sổ terminal. Tôi đưa ra một ví dụ về việc thiết lập mô-đun HC-05. Nếu bạn có một thiết lập khác nhau có thể khác nhau. Để mô-đun của chúng tôi nhận được lệnh, trước tiên, chúng tôi flash Arduino với phần sụn sau:
Trong trường hợp này, Arduino đóng vai trò là cầu nối giữa máy tính và mô-đun. Trong phần sụn, tôi sử dụng thư viện SoftwareSerial. Ở tốc độ cao, nó hoạt động không ổn định. Nếu bạn muốn tốc độ cao, bạn có thể kết nối mô-đun trực tiếp với các tiếp điểm Arduino RX và TX và viết lại phần sụn. Nhưng trong trường hợp của tôi, chúng tôi sẽ làm việc với mô-đun ở tốc độ 9600. Vì vậy, sau phần sụn, hãy mở thiết bị đầu cuối và nhập:
CÂU HỎI THƯỜNG (không có dấu ngoặc kép) câu trả lời CẨN THẬN sẽ đến (có nghĩa là mọi thứ được kết nối chính xác và mô-đun đang hoạt động)
Cốt truyện AT + BAUD96000 (không có dấu ngoặc kép) câu trả lời của OK OK0000 nên đến.
Nếu bạn có câu trả lời đúng, hãy đến bước tiếp theo.
Bước 7 Firmware
Để viết phần sụn và phần sụn chính nó, tôi sử dụng Arduino IDE. Phiên bản hiện tại cho ngày hôm nay là 1.8. Phần sụn thực tế:
Bước 8 Cài đặt điện thoại của bạn.
Trên điện thoại Android, bạn cần cài đặt chương trình để điều khiển robot thông qua Bluetooth. Có rất nhiều trong số họ. Bạn có thể nhập vào Bluetooth Bluetooth Arduino Arduino trong Google play và chọn theo sở thích của bạn. Tôi thích Bộ điều khiển BT. Tải xuống và cài đặt trên điện thoại hoặc máy tính bảng Android của bạn. Tiếp theo, thông qua cài đặt Android, bạn cần thiết lập kết nối với mô-đun của chúng tôi. Mật khẩu cho kết nối là chín 1234, hoặc 00 0000. Tiếp theo, cấu hình chương trình cho các lệnh thích hợp. Danh sách dưới đây.
Bước 9 Cài đặt máy tính (nếu cần)
Nếu cần thiết, hoặc chỉ thuận tiện cho việc kiểm soát, bạn có thể sử dụng máy tính hoặc máy tính xách tay. Để làm điều này, máy tính phải có Bluetooth. Chúng tôi thiết lập giao tiếp với mô-đun của chúng tôi thông qua các điều khiển trên máy tính. Tiếp theo, chúng ta cần một thiết bị đầu cuối để gửi lệnh. Bất kỳ thuận tiện cho bạn.Sau khi ghi phần sụn, điều khiển được thực hiện bằng các nút (lệnh) sau:
W - chuyển tiếp
S - trở lại
A - trái
D - phải
F - dừng lại
G - vô lăng
K - đèn pha
L - tắt đèn pha
Việc nhập liên tục các lệnh là bất tiện, vì vậy tôi khuyên bạn nên sử dụng chương trình để gửi lệnh. Tôi đang sử dụng Trình điều khiển Z. Trong chương trình, chọn cổng (cổng com thông qua đó kết nối được thực hiện) và cấu hình các phím cho các lệnh. Thiết lập nhàn rỗi và trực quan.
