


Trước tiên, hãy hiểu sự khác biệt giữa octocopter và quad quad. Ngoài tên, đây cũng là số lượng động cơ trên đường ray. Tức là quadrocopter - bốn động cơ, octocopter - tám. Điều này cũng đúng với hexacopter - sáu, trbest - ba, v.v. Nếu các hướng dẫn, ví dụ, là bốn (X) và tám động cơ, thì đây vẫn là một octocopter, nhưng được chỉ định là X8. Tức là trên bốn đường ray, tám động cơ.
Về cơ bản, các số có tiền tố cho copters là máy bay được điều khiển bởi tín hiệu vô tuyến điều khiển từ mặt đất. Một sinh viên đến từ Ấn Độ đã quyết định đi xa hơn và tạo ra một octocopter có khả năng nâng một người lên không trung. Đây không phải là một dự án giá rẻ. Các tài chính đã được thực hiện bởi các tổ chức giáo dục.
Dụng cụ và vật liệu:
- Động cơ Turnigy CA170 Động cơ - 8 chiếc;
- Bộ điều khiển Turnigy Fatboy 300A - 4 chiếc;
- Bộ điều khiển Turnigy 200A HV - 4 chiếc;
- Máy phát Hitech XG11 Tx / Rx;
Bộ điều khiển -Flight DJI A3 Pro;
Bộ điều khiển ánh sáng DJI Naza M V2;
- Pin Zippy 22.2V 5Ah 40C LiPo - 16 chiếc;
- Bộ sạc 6s LiPo;
-XT150 kết nối - 50 chiếc;
-Wire 8AWG Sillicon Dây - 10 mét;
Phục vụ;
-Ball để chơi squash (Squash Balls) - 4 chiếc;
- Tấm MDF 25cm x 50 cm x 2 mm;
-Drill;
- Máy mài góc;
- Tua vít;
- Cờ lê;
- Kìm;
-Laser cắt hoặc cưa băng;
-Assortment của các loại hạt 4mm, 6 mm và 8 mm, bu lông và vòng đệm;
-Burner;
Đèn LED-LED;
Phụ kiện -Soldering;
- Dây thép 2 và 3 mm;
-Telrep vít 100mm-200mm - 40 chiếc;
- 40 móc và bu lông mắt;
-Máy quay vòng quay RPM;
-Phân tích công suất (Turnigy Wattmeter / Ampmeter);
-Bộ điều khiển pin;
- Ống nhôm định hình;
- Tấm nhôm;
- Băng keo hai mặt;
-Máy giặt;
-Roulette;
-Computer với Fusion 360;
- Pin 11.1 V 2200 mAh LiPo 30C;
- Vải dày 1,2m x 1,2m;
- Chỉ và kim mạnh mẽ;
-Biết an toàn;
Bước một: Thiết kế
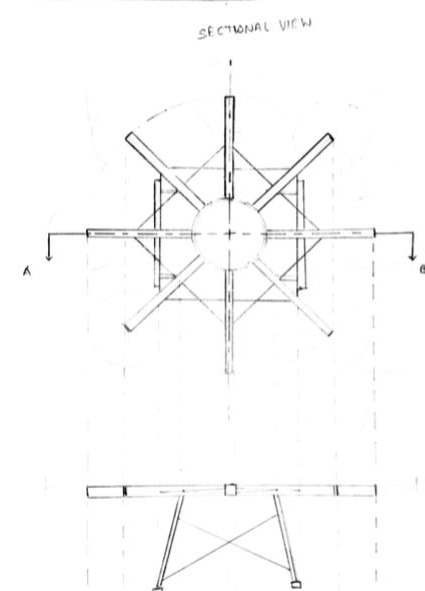
Khi phát triển một octocopter có người lái, chủ đã xem xét các tùy chọn cấu hình khác nhau, và X8 và H, và T, nhưng đã đi đến kết luận rằng tối ưu nhất, vì nhiều lý do, sẽ là thiết kế của octocopter, theo sơ đồ truyền thống.
Sau đó, cần phải tìm ra kích thước của octocopter nên là gì. Các tính toán được thực hiện bằng các mô hình CAD trên Fusion 360 làm ví dụ. Các ốc vít hiện có đã được tính đến trong các tính toán. Tối ưu hóa ra là đường kính ba mét, chiều cao một mét. Giỏ trong, cho một người 55x55 cm.

Bước hai: Giỏ hàng
Khung được hàn từ một hình vuông bằng nhôm với kệ 50 mm và độ dày thành 2 mm.
Hồ sơ đã được cắt và hàn. Các đường may được làm sạch.



Bước ba: Gắn tấm
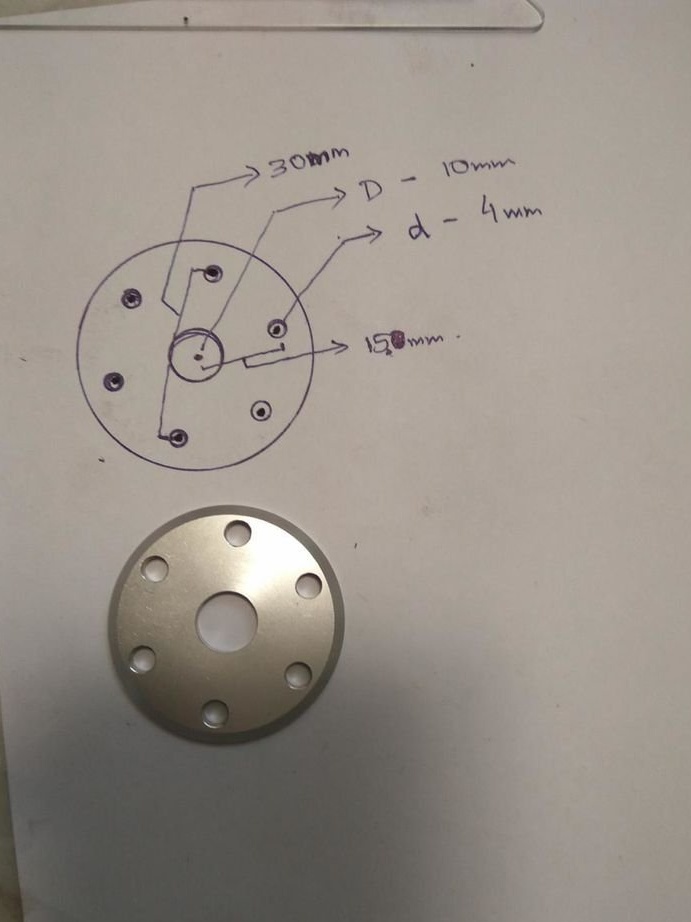
Đối với dấu ngoặc, chủ sử dụng tấm nhôm 1,5 mm. Có tám dấu ngoặc trong tổng số, bốn ở các góc và bốn ở giữa khung. Chiều dài của vai cánh tay và phần hỗ trợ là 15 cm. Giá đỡ được thiết kế trong Fusion 360. Các tấm được cắt bằng dao phay. Lỗ gắn được khoan trong chúng. Sau đó các dấu ngoặc được hàn vào khung.

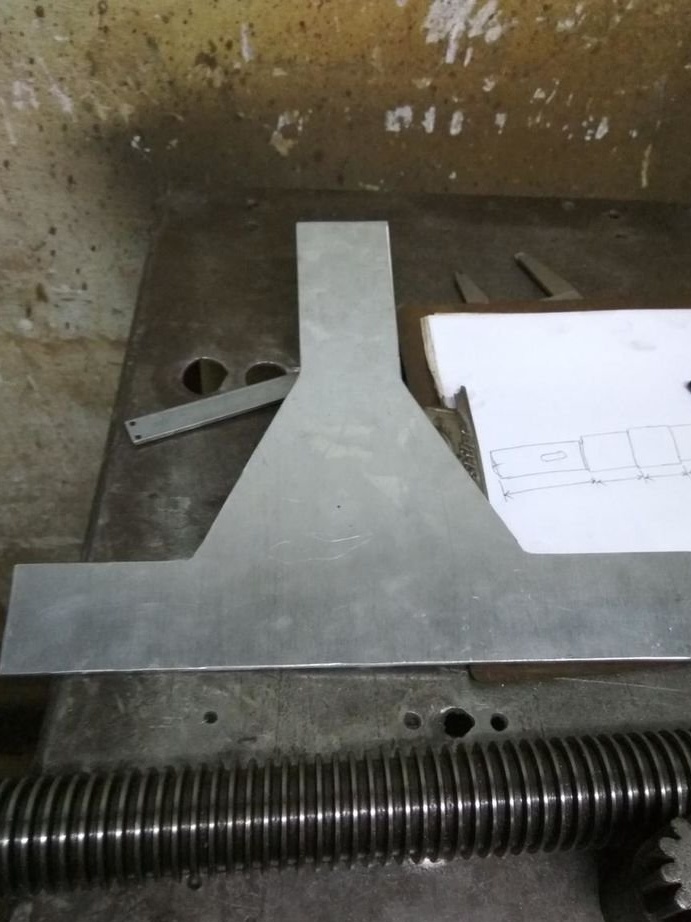





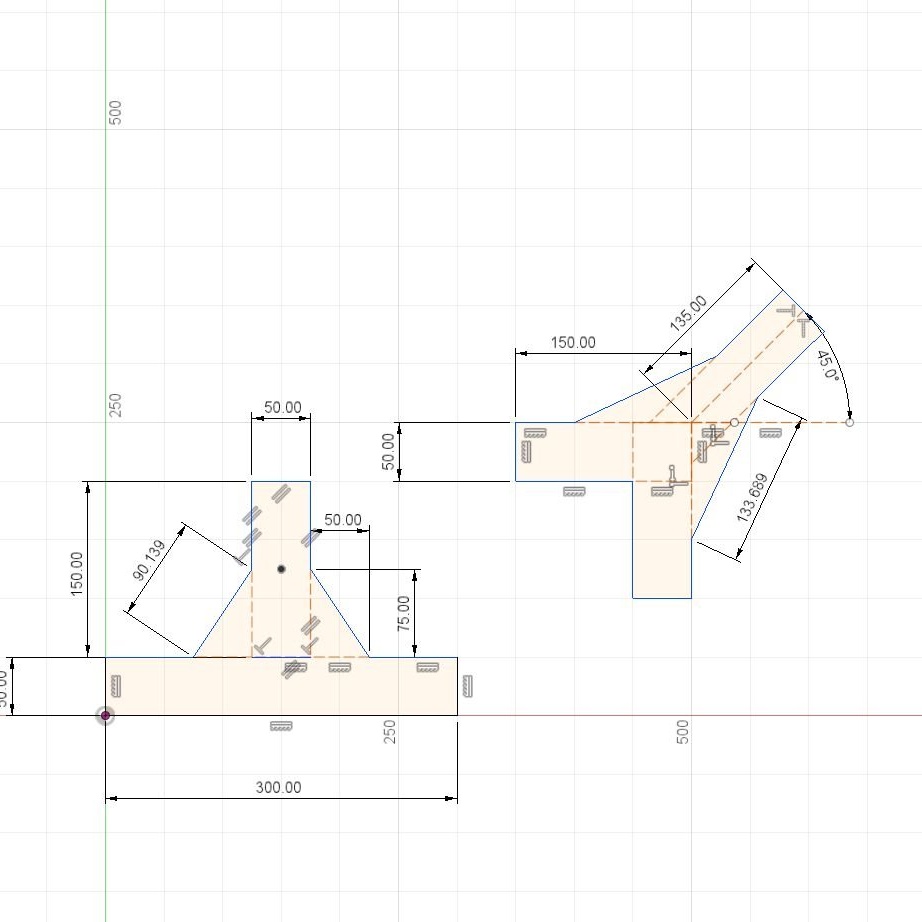
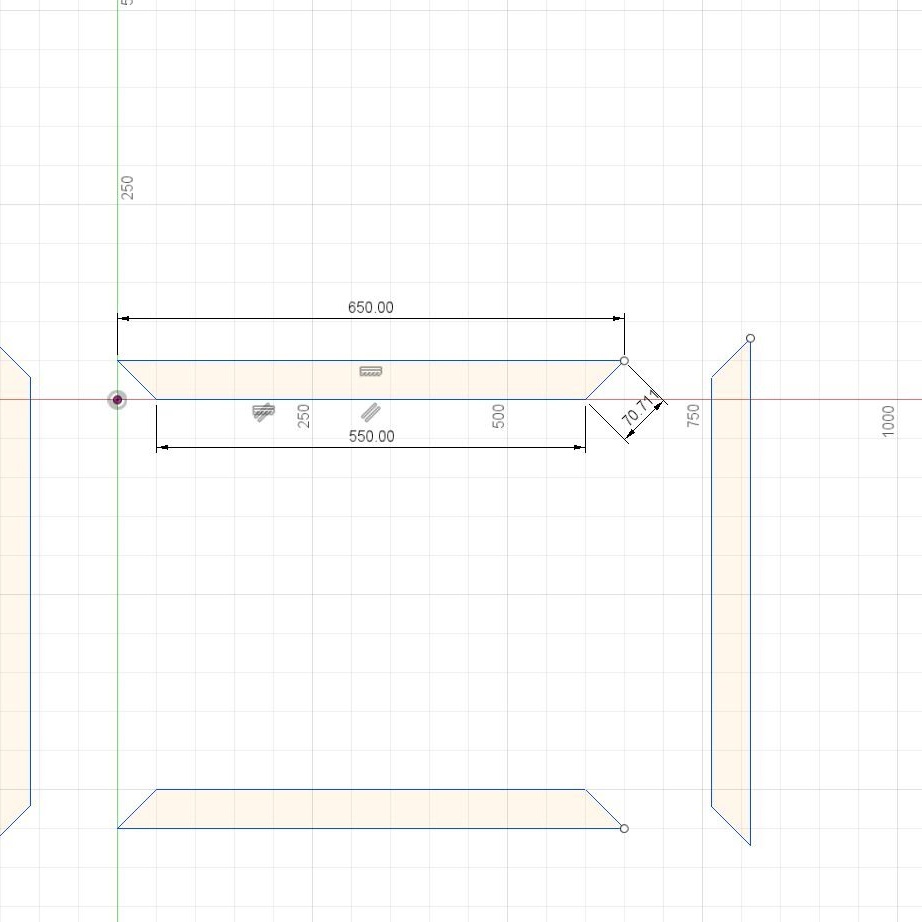
Bước bốn: Hồ sơ nhà cung cấp
Các cấu hình này được gắn vào giá đỡ và động cơ được cài đặt ở đầu của chúng. Các cấu hình là hình vuông, 50 X 50 cm và có chiều dài khác nhau. Hồ sơ dài 112,5 cm được gắn ở các góc 125 cm trong hồ sơ ở hai bên. Một phần cắt được thực hiện tại các cấu hình góc ở góc 45 độ. Điều cần thiết là mặt cuối của nó tiếp giáp với mặt phẳng của góc.
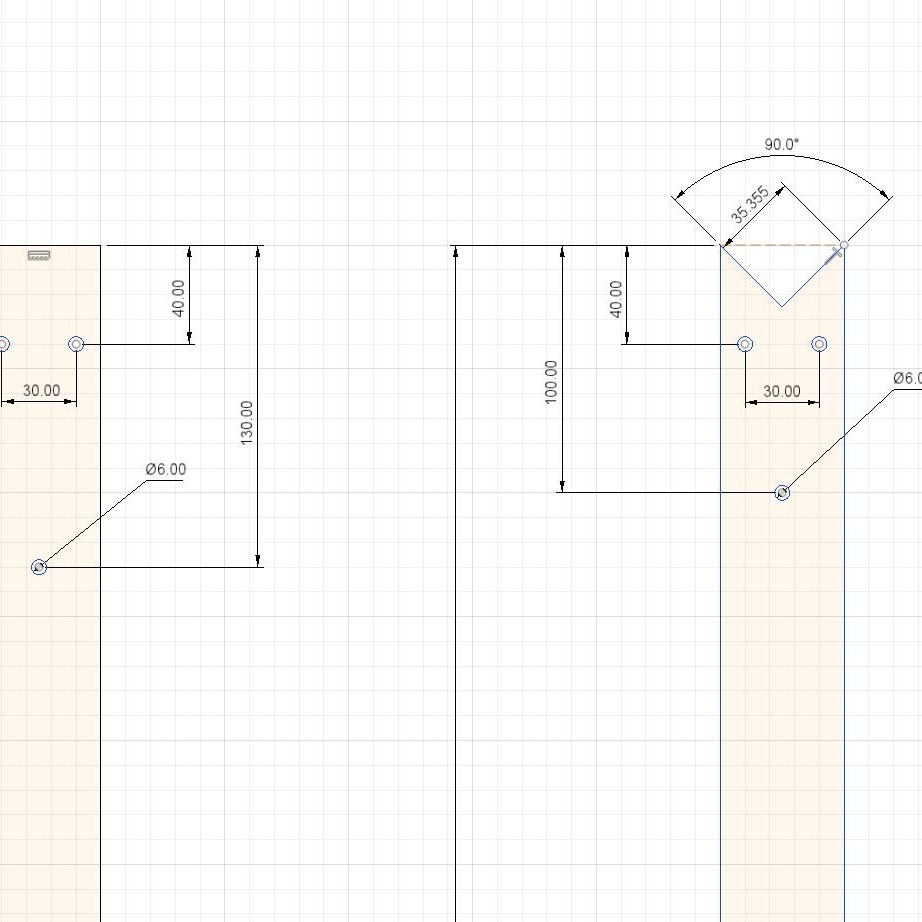
Để sửa các cấu hình cho dấu ngoặc, chủ khoan khoan các lỗ cho bu lông.




Bước năm: Gắn kết động cơ
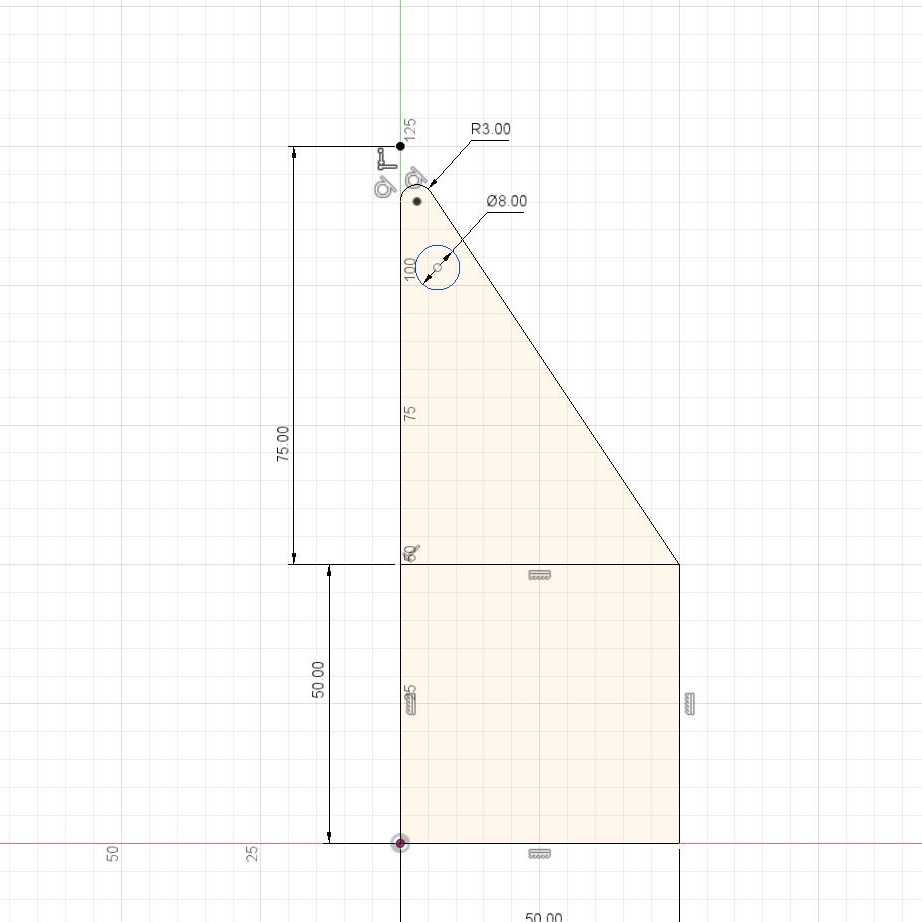
Động cơ được vặn vào một tấm nhôm vuông. Từ đáy đĩa, song song với nhau, hai góc được vặn. Khoảng cách giữa chúng bằng chiều rộng của hồ sơ. Hơn nữa, tấm với động cơ được gắn trên hồ sơ, các lỗ gắn được khoan và mọi thứ được xoắn bằng bu lông.





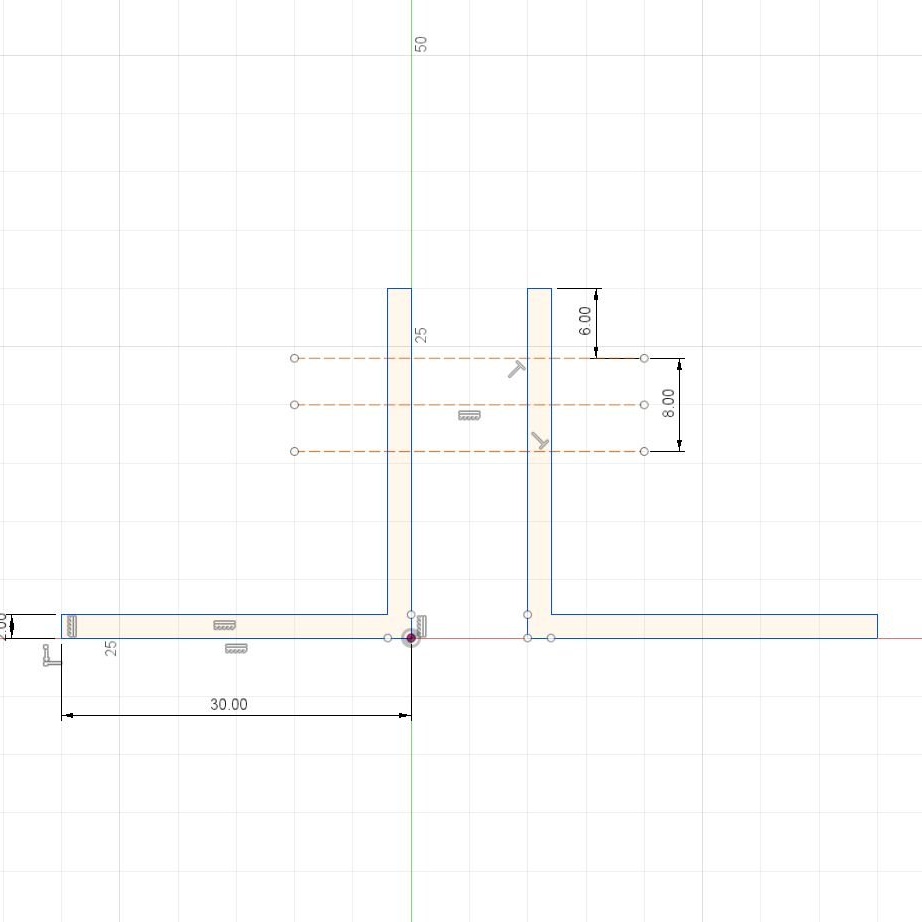
Bước sáu: Khung xe
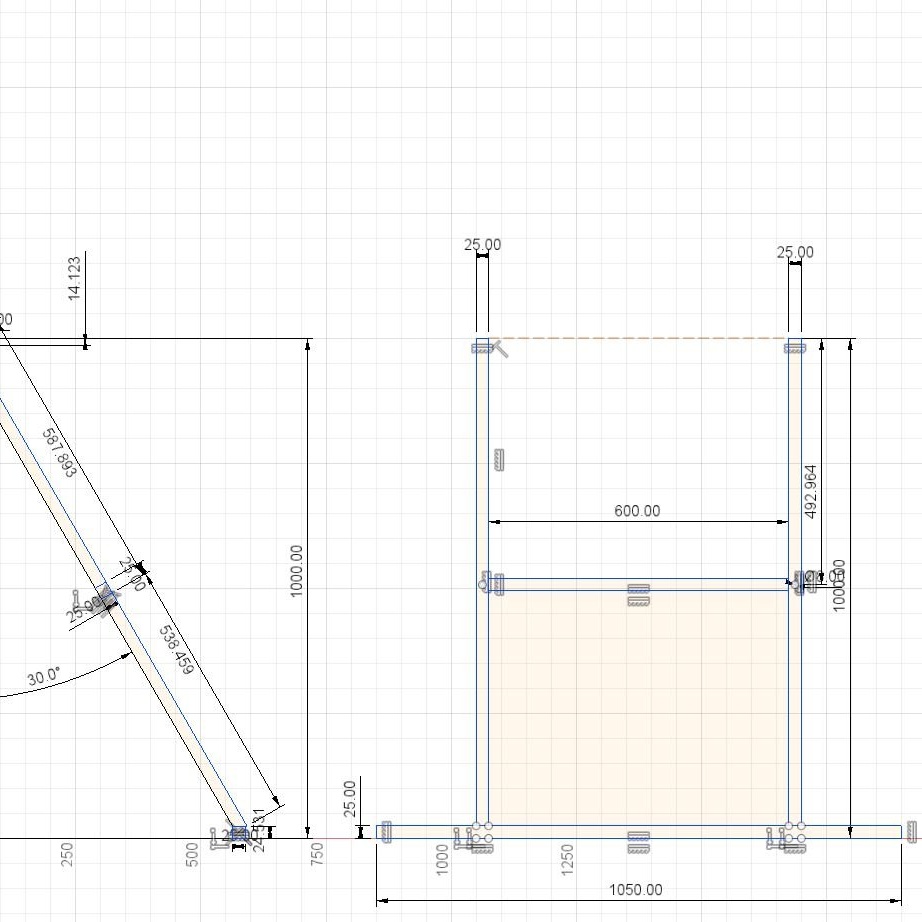
Khung xe được làm bằng nhôm định hình 25 x 25 mm và độ dày 3 mm. Tất cả các bộ phận đã được hàn, và kích thước của chúng có thể được nhìn thấy trong ảnh. Ý tưởng là gắn khung xe ra khỏi giỏ ở góc 30 độ. Để tránh làm hỏng khung xe, cáp hỗ trợ được kéo giữa chúng.


Bước bảy: Hồ sơ hỗ trợ
Sau khi cài đặt các công cụ, các cấu hình hỗ trợ bắt đầu uốn cong. Sau đó, ông chủ đã cố gắng khởi động động cơ và phát hiện ra rằng các cấu hình "đi bộ". Nó là cần thiết để tăng cường thiết kế.
Thêm tấm sẽ thêm quá nhiều trọng lượng cho cấu trúc. Sau đó, ông chủ quyết định thực hiện một thiết kế hình chữ V từ giỏ trở xuống. Dây thừng được gắn vào phần dưới của nó. Các đầu còn lại của cáp được gắn vào giá đỡ ở giữa các cấu hình hỗ trợ. Cáp được kéo bằng tời. Do đó, cấu trúc trở nên cứng.















Bước tám: Kết nối
Đầu tiên, chủ bán các đầu nối vào đầu dây.


Sau đó bắt đầu cài đặt. Mỗi động cơ phải được kiểm tra hướng quay. Nếu cần thiết, có thể dễ dàng thay đổi hướng quay của động cơ, và theo đó, vít, hoán đổi hai trong số ba dây dẫn từ ESC sang động cơ. Sau khi tất cả các động cơ được kết nối chính xác, trình hướng dẫn thực hiện cài đặt theo sơ đồ kết nối từ nhà sản xuất.
Bộ điều khiển chuyến bay IMU DJI A3 rất nhạy cảm với nhiễu từ kim loại và chủ không thể định cấu hình hệ thống do nhiễu. Do đó, bản gốc đã thay thế A3 bằng Naza M V2, có sơ đồ kết nối tương tự. Naza M V2 làm việc rất đáng tin cậy.
Sau đó, trình hướng dẫn kết nối pin. Trên mỗi cấu hình mạng di động, hai pin 22,2 V được kết nối nối tiếp.



Bước chín: Ghế phi công
Ghế được khâu từ vải bền. Ngoài ra, một vành đai an toàn được gắn vào phi công, được gắn vào khung và mũ bảo hiểm.






Bước mười: Chuyến bay đầu tiên
Trước chuyến bay phi công trên chiếc octocopter, một số thử nghiệm đã được thực hiện với một bao cát, và sau đó với mô hình của một người. Trong suốt chuyến bay, nhiều tình huống khác nhau đã được mô phỏng từ mất kiểm soát đến một cơn gió.
Sau tất cả các thử nghiệm, phi công cuối cùng đã bay lên không trung.






Trước khi bay, bạn phải thực hiện các hành động sau.
Kiểm tra độ kín của bu lông, dây cáp, lắp động cơ.
Kiểm tra hệ thống dây điện.
Kiểm tra các ốc vít xoay dễ dàng.
Hãy chắc chắn rằng tất cả các ESC được đặt thành tắt.
Đảm bảo tất cả các pin được gắn và sạc an toàn.
Kết nối nguồn với bộ điều khiển chuyến bay để khởi tạo và hiệu chuẩn.
Sau khi kết nối với GPS, nó sẽ chuyển sang chế độ hoàn toàn tự động (Alt. + Att. Hold).
Ngồi vào ghế phi công và khóa lên.
Kết nối tất cả các pin với ESC.
Kết nối hai pin nối tiếp (ESC-RB-RB-ESC) bằng điện trở để loại bỏ tia lửa.
Bật động cơ bằng cách bật công tắc sang vị trí bật.
Sử dụng bộ điều khiển để điều khiển octocopter.